2007 年度 修士論文
人と人のコミュニケーション活性化 支援システムの設計
Communication Activator System on Group Communication
提出日 2008 年 2 月 4 日
指導教授
小林 哲則 教授
早稲田大学大学院 理工学研究科
情報・ネットワーク専攻 知覚情報システム研究 3606U101-1
松 山 洋 一
目 次
第1章 序論 1
1.1 背景 . . . . 1
1.1.1 高齢社会の現状 . . . . 1
1.1.2 コミュニティケア . . . . 1
1.1.3 ロボット産業の現状 . . . . 4
1.2 先行研究 . . . . 4
1.2.1 イフボット . . . . 5
1.2.2 Paro . . . . 6
1.3 高齢者施設におけるコミュニケーション . . . . 7
1.4 本研究のアプローチ . . . . 8
1.5 本論文の構成 . . . . 9
第2章 コミュニケーション活性の分析 11 2.1 コミュニケーション活性の定性的定義 . . . . 11
2.2 コミュニケーション活性状態 . . . . 11
2.3 コミュニケーション活性要素 . . . . 12
2.3.1 各活性要素の性質 . . . . 14
2.4 コミュニケーション活性量 . . . . 16
2.5 行動選択 . . . . 16
第3章 活性量と行動選択の定式化 18 3.1 活性量 . . . . 18
3.2 行動選択 . . . . 18
第4章 タスクの設定 20 4.1 難読ゲーム . . . . 20
4.2 難読ゲームにおける活性量 . . . . 21
4.3 行動パターン . . . . 21
4.4 個人性の考慮 . . . . 22
第5章 システム概要 23 5.1 提案アーキテクチャ . . . . 23
5.1.1 センサモジュール群 . . . . 24
5.1.2 判断モジュール群 . . . . 25
5.1.3 反射行動層 . . . . 25
5.1.4 行動モジュール . . . . 25
5.1.5 個人モデル . . . . 26
5.1.6 環境マップ(グラフィカルユーザインタフェース) . . . . 26
第6章 実験 28 6.1 実験場所 . . . . 28
6.2 被験者 . . . . 28
6.3 実験ハードウエア . . . . 28
6.4 実験条件 . . . . 28
6.5 結果 . . . . 32
6.5.1 ビデオ分析 . . . . 32
6.5.2 インタビュー . . . . 32
6.6 議論 . . . . 34
第7章 今後の課題 36
第8章 総括 37
謝辞 38
表 目 次
1.1 高齢者施設の一日のスケジュール例 . . . . 9
図 目 次
1.1 平成19年度版 高齢社会白書「高齢化の推移と将来推計」(内閣府) . . . . 2
1.2 平成19年度版 高齢社会白書「65歳以上の高齢者のいる世帯数及び構成割 合(世帯構造別)」(内閣府) . . . . 3
1.3 コミュニティケア概念図 . . . . 4
1.4 ロボットの市場規模予測(日本ロボット工業会 ),2001年 . . . . 5
1.5 イフボット . . . . 7
1.6 Paro . . . . 8
1.7 コミュニケーションモデル . . . . 9
2.1 活性要素を計算する関数の特性 . . . . 14
2.2 活性化サイクル . . . . 17
4.1 難読ゲームタスク . . . . 20
5.1 システム全図 . . . . 23
5.2 提案アーキテクチャ . . . . 24
5.3 個人モデル . . . . 26
5.4 環境マップ(グラフィカルユーザインタフェース) . . . . 27
6.1 実験の様子 . . . . 29
6.2 音声対話ロボットROBISUKE . . . . 30
6.3 実験条件(1)(司会のみ) . . . . 31
6.4 実験条件(2)(司会+ケアスタッフ) . . . . 31
6.5 実験条件(3)(司会+ロボット) . . . . 32
6.6 結果(1)(司会のみ) . . . . 33
6.7 結果(2)(司会+ケアスタッフ) . . . . 33
6.8 結果(3)(司会+ロボット) . . . . 34
第 1 章 序論
1.1 背景
1.1.1 高齢社会の現状
本研究のマクロな背景として,高齢社会が挙げられる.
我が国の総人口は,2006年10月1日現在,1億2,777万人で,前年(1億2,777万人:平 成17年国勢調査)に比べてほぼ横ばいになっている.その中で65歳以上の高齢者人口 は,過去最高の2,660万人(前年2,567万人)となり,総人口に占める割合(高齢化率)
も20.8%(前年20.1%),すなわち5人に1人が高齢者となっている [1].
また,平均寿命は,2005年現在,男性78.56年,女性85.52年であるが,今後,男女と も引き続き延びて,2055年には,男性83.67年,女性90.34年となり,女性の平均寿命は 90年を超えると見込まれている
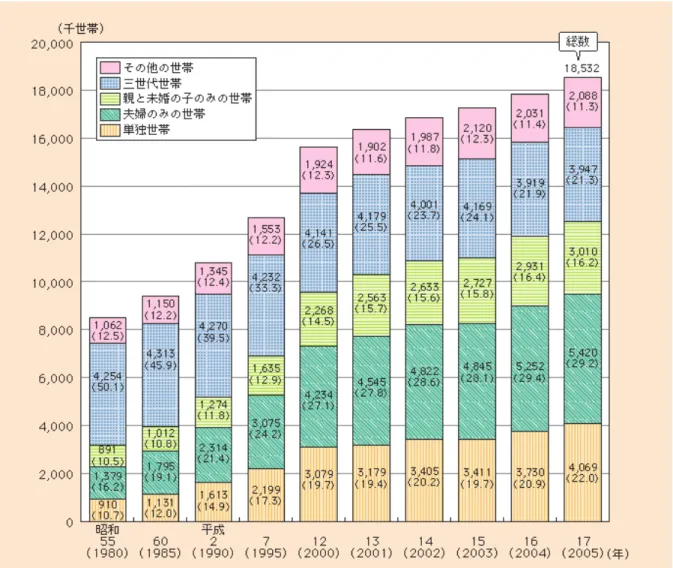
このような中,65歳以上の高齢者のいる世帯の内訳についてみると,2005年現在,「単 独世帯」が407万世帯(22.0%),「夫婦のみの世帯」が542万世帯(29.2%),「親と未婚 の子のみの世帯」が301万世帯(16.2%),「三世代世帯」が395万世帯(21.3%)となっ ており,高齢者のいる世帯に占める単独世帯や夫婦のみ世帯は,増加傾向が続いている.
1.1.2 コミュニティケア
このように高齢社会は不可避であり,単独高齢者世帯が増加している事実が厳然とし て存在する中で,いかに多くの高齢者が安心安全に,生き甲斐のある充実した人生を全 うできるか否かが我々の社会の抱える大きな課題である.つまり,誰しもに訪れる終末 期を如何に過ごすか,如何にケアするかが問われている.従来,末期がん患者などのケ アとしてホスピスケア [2]が提唱されてきたが,近年では,末期がん患者,高齢者に限ら ず,終末期にある人たちをどのようにケアしてゆくのかが盛んに議論されている.
図 1.1: 平成19年度版 高齢社会白書「高齢化の推移と将来推計」(内閣府)
このようなケアの基本的な考え方として国内外で一般的に受け入れられているのは以 下のようなものがある[3].
ケアの要件 -5項目- (日本ホスピス緩和ケア協会)
(1) 人が生きることを尊重し、誰にも例外なく訪れる死への過程に敬意をはらう。
(2) 死を早めることも死を遅らせることもしない。
(3) 痛みやその他の不快な身体症状を緩和する
(4)精神的・社会的な援助を行い、患者に死が訪れるまで、生きていることに意味を見 出せるようなケアを行う。
(5) 家族が困難を抱えて、それに対処しようとするとき、患者の療養中から死別した後 まで家族を支える。
図 1.2: 平成19年度版 高齢社会白書「65歳以上の高齢者のいる世帯数及び構成割合(世 帯構造別)」(内閣府)
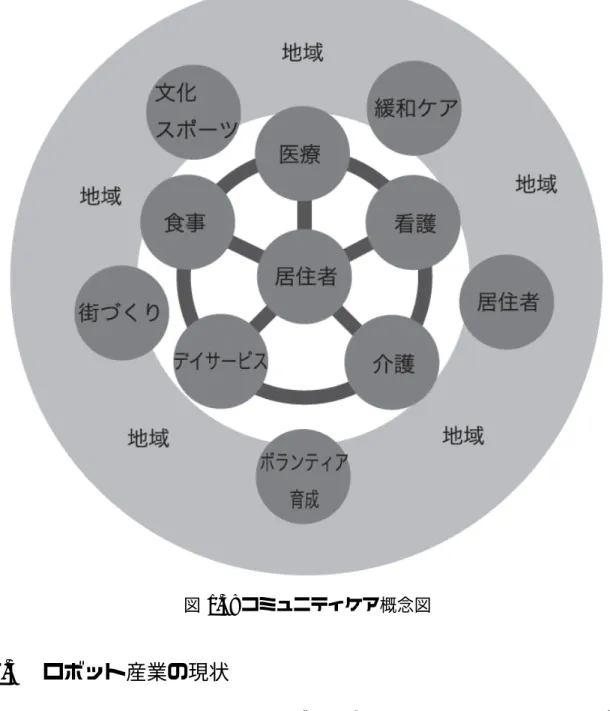
このような基本的な態度を踏まえつつ,近年では近年被介護者の家族を含むケアを市 町村や専門家等のチームによるコミュニティ全体で行う「コミュニティケア」が提唱さ れている.本来日本ではこのような地域によるケアが当然であったが,前述のように単 独高齢者世帯が増加する現状にあっては,自治体,企業,NPO等によるコミュニティづ くりの必要性が叫ばれている.
図 1.3: コミュニティケア概念図
1.1.3 ロボット産業の現状
一方,今日多くのコミュニケーションロボットが開発され,製造分野等を含むロボット 産業全体と共に市場拡大が期待されているが(図1.4),コミュニケーションロボットの 存在意義や目的,また有効なアプリケーションは必ずしも明確ではなかった.
1.2 先行研究
高齢者対応コミュニケーションロボットとして,既に実用化されたシステムとして「イ フボット」と「Paro」が挙げられる.
図 1.4: ロボットの市場規模予測(日本ロボット工業会 ),2001年
1.2.1 イフボット
コミュニケーションロボットを用いた高齢者支援システムとして,ビジネスデザイン研 究所より2003年から実用化されてきたシステムである[4].人間からあえて遠ざけた宇宙 人風のデザインが採用されている(図 1.5).シリーズとしていくつかのバリエーション があり,「ノーマルタイプ」は数万パターンの会話が登録されており,1対1の会話を楽 しむことができる.また,高齢者向けの「よりそいイフボット」は,高齢者向けに会話内 容を変更したもので,脳を活性化させる目的で以下のようなコンテンツが含まれている.
• 計算
• なぞなぞ
いわゆるトンチであり,自分の持っている知識を出すのではなく,応用力と想像力 を要す.右脳を使って考え答えを出すプロセスが必要となる.
• クイズ
記憶の引き出しを開けることを目的とする.
• 記憶ゲーム
単語を記憶して,それを答えるゲーム.
• イメージゲーム
回想法を取り入れたもの.
• 発声練習
• 想起ゲーム
失語症の人のリハビリに使われる手法を用いている.
• 日時の確認
• 日替わり一言 季節の確認が目的
• 昔のニュース
回想法を取り入れたもの.
• うた
• メディカルチェック
• 献立アドバイス
• カロリー計算
• マナー
高齢者施設等での導入事例の多さは特筆すべきであるが,この事例では,複数人の存 在するグループコミュニケーションにおける振舞い等については触れらてていない.ま た,音声以外のモダリティに乏しいと言わざるを得ず,より人間に近いモダリティを有し たコミュニケーションやその活性化に関する事例はこれまでほとんど無かったと言える.
1.2.2 Paro
高齢者対応のコミュニケーションロボットとして,定量的な評価方法まで踏み込んだ 注目すべき事例としてアザラシ型ロボットのParoが挙げられる(図 1.6).心理的効果
(リラックス,動機の増加など),生理的効果(バイタルサインの改善など),社会的効果
(患者同士や看護者とのコミュニケーションの増加など)を目的としたAnimal Assisted
図 1.5: イフボット
Therapy (AAT)からヒントを得て開発され,Paroを長期間導入したことで高齢者のうつ
症やストレスの改善が見られたことが報告されている.また,この評価の際の指標とし て,現在の気分を表情のイラストから選んでもらうFace Scaleや,高齢者のうつ判断に用 いられるアンケートのGeriatric Depression Scale (GDS)を用いたり,脳機能測定(EEG)
でα波の頭皮上電位分布を計測し癒し効果を計測するなど,定量的な分析がなされた.長 期間の実験後,複数の被験者の人間関係がどのように変化したかなど社会心理学的影響 も調査されている.
しかしながら,このような評価実験を音声対話等も可能なヒューマノイド型コミュニ ケーションロボットで行われた事例はやはり過去に無かったと言える.
1.3 高齢者施設におけるコミュニケーション
このような背景のもと,高齢者施設における継続的なフィールド調査を行った.その 結果,ケアの現場ではコミュニケーション自体が目的であること,活発なコミュニケー ションは認知症やうつ病の予防でもあること,また質の高いケアを提供するためにはの
図 1.6: Paro
専門家同士の密なコミュニケーションが不可欠であることが再確認できた.
さらに既存のコミュニケーションロボット(図1.5)のユーザ,および導入された施設 へのヒアリング調査を行ったところ,ロボットの存在はコミュニケーションの方法や頻 度を変化させ家族の関係を変えうること,末期ガン等の終末期の重くなりがちな空気も ロボットの存在によって和らぐこと,また人とロボットの「閉じた」関係だけでは飽き が来ること等の声を聞いた.すなわち,コミュニケーションロボットに求められる重要 な機能の一つはコミュニティレベル,対話レベル問わず「人と人のコミュニケーション の活性化支援」にあるといえる.
1.4 本研究のアプローチ
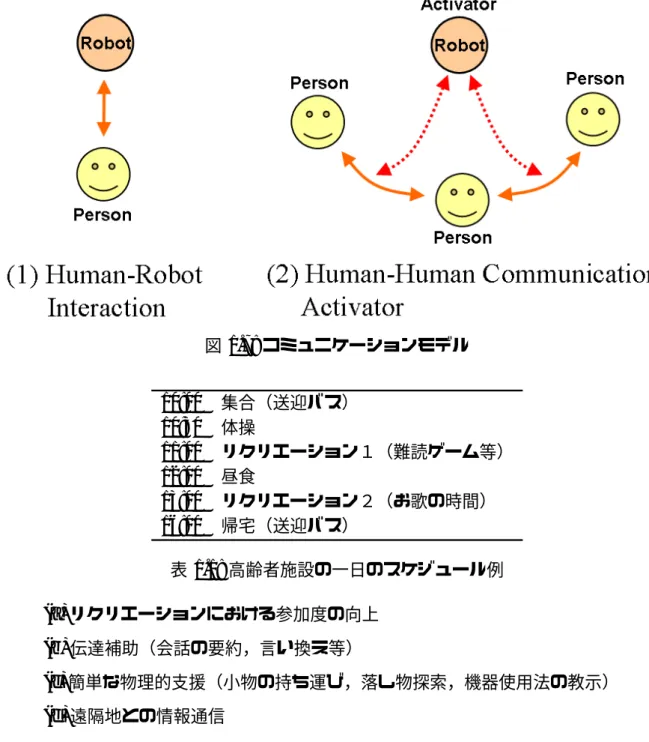
よって本研究では,人と人のコミュニケーションの活性化(図1.7の(2)),特に高齢 者施設における高齢者と介護者,また高齢者同士のコミュニケーションを活性化させる ことに目標を絞ったシステム設計を試みる.
ここで,想定する高齢者施設の一日のスケジュールを表1.1に示す.このようなスケ ジュールの中でロボットに求められる要求仕様を明らかにするためにペルソナ(シナリ オ)法によってニーズ分析を行った(付録参照).ニーズをまとめると以下のようなもの が挙げられる.
図 1.7: コミュニケーションモデル
10:00 集合(送迎バス)
10:30 体操
11:00 リクリエーション1(難読ゲーム等)
12:00 昼食
13:00 リクリエーション2(お歌の時間)
16:00 帰宅(送迎バス)
表 1.1: 高齢者施設の一日のスケジュール例 (a)リクリエーションにおける参加度の向上
(b)伝達補助(会話の要約,言い換え等)
(c)簡単な物理的支援(小物の持ち運び,落し物探索,機器使用法の教示)
(d)遠隔地との情報通信
この中でここでは特に(a)「リクリエーションにおける参加度の向上」について検討する.
1.5 本論文の構成
本論文は全8章から構成される.以下に各章ごとの内容を述べる.
第2章ではコミュニケーション活性について分析する.具体的な例からコミュニケー ションの活性について考察し,「コミュニケーション活性状態」,「コミュニケーション活 性化」,「コミュニケーション活性量」,「コミュニケーション活性因子」を定義する.活性
要素は,大きく「(コミュニケーションへの)参加度」,「(コミュニケーションへの)満 足度」,「会話円滑度」に分類できることを示す.また,コミュニケーション活性化を図る ためにロボットに求められる行動選択について整理する.
第3章では活性量と行動選択について定式化を行う.第2章で定性的に分析・定義し た枠組みを定式化する.ここでは,コミュニケーション活性量は各活性要素の線形結合 として定義する.またロボットの行動選択は,常に活性量を最大化しうるように行動と 行動対象を選択することを示す.
第4章では対象タスクを設定する.タスクとして高齢者介護施設にて行われている「難 読ゲーム」を取り上げ,ゲームの説明と,本タスクにおける活性要素と必要な行動につ いて検討する.ここでは難読ゲームを5つのフェーズに分けて考え,特に出題と答え合 わせのフェーズについて考察する.活性要素に関しては,「参加度」として回答数や注意 度,「会話円滑度」としてテンポ感と発話頻度をセンサ情報を元に算入する.また,選択 される行動パターンは,Ask Someone(特定の人に発言を促す),Hint(ヒントを要求す る),Break Silence(静寂を破る)などの行動を用意する.さらに,ユーザごとの個人性 を考慮することにも言及する.
第5章ではシステムのアーキテクチャについて説明する.特にセンサモジュール群,判 断モジュール,行動モジュール群,個人データベース,環境マップ(グラフィカルユーザ インタフェース)について説明する.
第6章では実装したシステムを用いて高齢者施設「ケアタウン小平」で実施したフィー ルド実験(難読ゲームタスク)について述べる.実験条件として,被験者3名に対して (1)司会者(学生=素人)のみの場合,(2)司会者(学生)とスタッフ(専門家)が盛り上 げ役として参加した場合,(3)司会者(学生)とロボットの場合の3条件で行った.その 結果について説明し,特に被験者の発言率と笑顔の頻度を比較することにより,ロボット がコミュニケーションの活性化に有効であったことを示し,全体的な考察を加える.
第7章では今後の課題について述べ,第8章にて本研究の総括を行う.
第 2 章 コミュニケーション活性の分析
2.1 コミュニケーション活性の定性的定義
まず,ここで扱うコミュニケーション活性に関して,「活性状態」,「活性化」,「活性量」,
「活性要素」について定義する.
(1)コミュニケーション活性状態
人-人コミュニケーションが活発に行われている状態であり,本研究におけるシステム の目標とする状態である.
(2)コミュニケーション活性化
人-人コミュニケーションの不活性状態から,活性状態への状態遷移させることである.
(3)コミュニケーション活性量
人-人コミュニケーションが活発に行われているか否かの指標であり,タスクとユーザ に依存する量である.ある閾値を超えたときに活性状態であると定義する.
(4)コミュニケーション活性要素
活性量を構成する要素であり,センサ情報として環境から取得される値である.参加 度や満足度等,タスクとユーザに依存する量である.
以下でそれぞれについて詳しく述べる.
2.2 コミュニケーション活性状態
コミュニケーションが活性している状態とはどういったものであるのか,具体的な例 を挙げて検討する.
例えば3人で談笑している状況を考える.3人は共通の話題に対して話をしており,一 人がしゃべると他の2人は発話者の方を向いて話を聞く.もしある一人がうつむいたま ま何も話す意思がないとすれば,それは3人でのコミュニケーションにとっては好ましく ない状況である.つまり3人でのコミュニケーションにおいては3人全員の参加が好まし
いものとし,個人がそのコミュニケーションに参加しているかどうかが活性に関わって いるとすることが出来る.さらにこの談笑に2つの状況を考える.一方は全員が積極的 に発言をし,コミュニケーションにおける参加の度合いは個々人高いものであるが,全 員の表情が暗く,明らかに嫌悪感をもって談笑に参加している.もう一方は同じく全員 の参加の度合いは高いが,表情は皆常に笑顔で笑い声が絶えない.この二つの状況にお いては比較するまでもなく,後者の状況の方が活性しているということは明らかである が,これは談笑において個々人が楽しんでいることが重要であるということを示してい る.談笑にはそのような楽しみを求めて参加しており,コミュニケーションにおいては 個人が満足しているかどうかが活性に関わる要因の一つと考えることが出来る.また定 性的な観察から得られた知見として,「会話のテンポ感であったり話題展開であったり話 者交代であったり,コミュニケーションがリズムカルに円滑に進行していること」こと も挙げられる.
以上を整理すると,コミュニケーションの活性に関わるものとして以下の三つの要素 にまとめることが出来る.
• 個人がコミュニケーションに積極的に参加していること(参加度)
• 個人がコミュニケーションを楽しみ,満足していること(満足度)
• コミュニケーション全体が円滑に進行していること(会話円滑度)
参加度,満足度はコミュニケーションに参加する個人ごとに設定されるものであり,コ ミュニケーションの活発さを表す要因とすることが出来る.また会話円滑度はコミュニ ケーション全体を総括して見るべきものであり,コミュニケーションの円滑さを表す要 因とすることが出来る.
つまりコミュニケーションの活性とは個人性・全体性を示す要因から表現され,コミュ ニケーションの活性状態とは「コミュニケーションが活発かつ円滑に行われている状態」
と定義することが出来る.
2.3 コミュニケーション活性要素
まず参加度を示す現象について考察する.参加度は共通の話題,共通の注目対象など 場の中心を共有できているかというグループコミュニケーションの原則に基づく.加え
て,タスクごとにルールがある場合は,それを追従出来ているか,または達成出来てい るかということも参加度を示すものとする.
• 話題の中心(発話者等)に視線が向いているか(視線方向)
• 多く発言しているか(発言数)
• 発言する内容が話題に沿っているか(発言内容)
• タスクにごとに設定されるルールに追従できているか(タスクルール)
次に満足度を示す現象について考察する.基本的な役割は個人が楽しんでいるかどう かを判断するものであり,さらに同意・拒否なども加える.
• 笑顔であるか(表情)
• 笑っているか(笑い声)
• 声が高揚しているか(韻律)
• 首のかしげ,振りがあるか(頭部ジェスチャ)
最後に会話円滑度を示す現象について考察する.会話の円滑度を観測する手法は発話 権のやり取りなどによって判断する.また,発言出来ていない人がいないかどうかを見 ることは,健全なコミュニケーションの活性化のために必要なことであると考える.
• 常に誰かが発話しているか(発話頻度)
• 会話に無駄な間がないか,連鎖的に次々としゃべる人がいるか(テンポ感)
• 話題が停滞していないか(話題転換率)
• 全員が均等にしゃべっているか(均等性・健全性)
これら活性に関わる基本要素を「活性要素」と呼び,活性を表す最小単位と定義する.
ここでさらに考慮すべき点は,活性要素の値を線形の関数で決定してはならないとい うことである.活性要素の値はセンサ情報から求められるが数値化する際の関数を単純 に線形な関数で表してしまうと,特定の行動の優位性が出てしまう(図2.1).よって,活 性要素を数値化する関数は活性要素の性質を吟味し,慎重に決定する必要がある.
観測地 活性
要素 の値
観測地 活性
要素 の値 の増 加量
観測地 活性
要素 の値
観測地 活性
要素 の値 の増 加量
図 2.1: 活性要素を計算する関数の特性
2.3.1 各活性要素の性質
各活性要素の性質について述べる.
• 視線方向
発話者であったり注目する対象物であったり,既知の話題の中心の方向へ視線が向 いているかを判断する.向いているかそうでないかの2値で表される.
• 発言数
個人における,単位時間あたりもしくは単一の話題中に発言した回数.少ない時に は活性にとって深刻であるが,多すぎても影響は薄いという対数的な性質を持つ.
• 発言内容
現在の場の話題と個人の発言の内容の意味的距離を取る.閾値を定め,ある範囲内 では似たような話題であると許容されるが,それ以外は別の話題と判断する.
• タスククルール
タスクごとに設定される,タスクのルールに追従出来ているかどうかである.「難読 ゲーム」で言えば,回答数,正解数などである.
• 表情
笑顔認識などによって得られる.個人差や履歴を考慮し,より笑顔の方が望ましい.
笑顔か否かの2値,もしくは数段階のレベルを設定する.レベル0は最も深刻な値 である.
• 笑い声
笑っているか否かを判断する.個人差,履歴,またつられて笑っているのかどうか というその状況などを考慮する.状況などによって数段階のレベルを設定する.自 分だけ笑っていない状況が最も深刻.
• 韻律
声の韻律によって気持ちが高揚しているか否かを判断する.また,賛成・反対の判 断も出来る.賛成・反対,気持ちの高揚具合でマトリクス状に数段階のレベルを設 定する.
• 頭部ジェスチャ
首振りの動きによって,賛成・反対の判断ができる.賛成・反対・どちらでもない,
の3段階のレベル設定が出来る.
• 発話頻度
単位時間当たりの発話区間の割合によって求める.少なくなればなるほど深刻になっ ていく.人間の感覚に沿った対数的な性質を示す.
• テンポ感
発話権の受け渡しの様子や,時間的な受け渡し頻度などから判断する.長時間発話 権を渡さない状況や受け渡した後しばらくしゃべらないなど状況が深刻である.
• 話題転換率
話題はタスクによって区切られる場合がある(出題,答えあわせ等)が,主に全員 の発話の内容から推測されるものである.早すぎる話題転換は良くないが,長時間 だらだらと同じ話題も良くない.話題の収束を理解する必要がある.時間と状況に 関しての関数になる.
• 均等性
参加者全員に発話権がいきわたるとより健全である.履歴を取って分散を最小化 する.
2.4 コミュニケーション活性量
コミュニケーション活性量とは,コミュニケーションがどれだけ活性しているか,
活性の度合いを具体的に数値化したものである.コミュニケーション活性量の値は 各活性要素を数値化することによって算出され,活性量を活性の度合いを測る唯一 の評価指標とする.
2.5 行動選択
活性化のために最適な行動選択の手法について検討する.
ここまでをまとめたものを図2.2に示す.活性を表す様々な現象として,活性要素 があり,それら活性要素は参加度,満足度,会話円滑度に分類される.そして各活 性要素を数値化することによってコミュニケーションの活性の客観的評価指標とし て活性量を得る.現在の活性量を基にそれをより増加させるような行動を選択し,
実行する.行動によって実際の現象である活性要素の値が変化し,それによってま た現在の活性量が更新される.このようなサイクルを回すことによって,コミュニ ケーションの活性化を図る.問題はこの活性化サイクルにおける行動選択の方法で ある.行動選択によって確かに活性量が増加するような行動を選択出来れば,コミュ ニケーションは活性化へと向かう.そのため,行動の選択には各行動を実行した場 合における活性量の増加量を予測する必要がある.
活性量の予測増加量の計算方法に関しては様々な方法がある.一つは学習によって 行動ごとの予測増加量を表として保持するものである.しかしこれは学習における データの収集が難しく,また行動を追加した際には再学習を行わなければならない ため,拡張性に欠ける.もう一つの方法は本研究における手法であり,行動ごとに 擬似的な活性化サイクルを回すものである.行動には「ある個人の視線を向けさせ るもの」「全体の会話を増やすもの」というように各活性要素に対する効果を仮定 しておく.そして行動選択の時に行動ごとにその効果の仮定を基に活性要素の値を 変化させ,活性量を求める.これを行動後の予測活性量とする.行動後の予測活性 量と現在の活性量の差分として活性量の予測増加量が求められる.個人に対して行
活活活活 性性性性 量量量量
発話頻度 発話頻度 発話頻度 発話頻度 テンポ テンポ テンポ テンポ感 感 感 感 話題転換率 話題転換率 話題転換率 話題転換率 均等性 均等性
均等性 均等性( ( ( (健全性 健全性 健全性 健全性) ) ) )
:
:
:
: 満足度 満足度
満足度 満足度
会話円滑度 会話円滑度 会話円滑度 会話円滑度
視線方向 視線方向 視線方向 視線方向 発言数 発言数 発言数 発言数 発言内容 発言内容 発言内容 発言内容 タスクルール タスクルール タスクルール タスクルール
:
:
:
: 笑顔 笑顔 笑顔
笑顔( ( ( (表情 表情 表情 表情) ) ) ) 笑 笑
笑 笑い い い い声 声 声 声 韻律 韻律 韻律 韻律
:
:
:
: 参加度
参加度 参加度 参加度
「
「 「
「物理作用 物理作用 物理作用」 物理作用 」 」 」
「
「 「
「知覚 知覚 知覚 知覚」 」 」 」
「
「 「
「解釈 解釈 解釈」 解釈 」 」 」
「 「
「 「評価 評価 評価 評価」 」 」 」
行行行行 動動動動
行 行 行
行 動 動 動 動 選 選 選 選 択 択 択 択
活活活活 性性性性 量量量量
発話頻度 発話頻度 発話頻度 発話頻度 テンポ テンポ テンポ テンポ感 感 感 感 話題転換率 話題転換率 話題転換率 話題転換率 均等性 均等性
均等性 均等性( ( ( (健全性 健全性 健全性 健全性) ) ) )
:
:
:
: 満足度 満足度
満足度 満足度
会話円滑度 会話円滑度 会話円滑度 会話円滑度
視線方向 視線方向 視線方向 視線方向 発言数 発言数 発言数 発言数 発言内容 発言内容 発言内容 発言内容 タスクルール タスクルール タスクルール タスクルール
:
:
:
: 笑顔 笑顔 笑顔
笑顔( ( ( (表情 表情 表情 表情) ) ) ) 笑 笑
笑 笑い い い い声 声 声 声 韻律 韻律 韻律 韻律
:
:
:
: 参加度
参加度 参加度 参加度
「
「 「
「物理作用 物理作用 物理作用」 物理作用 」 」 」
「
「 「
「知覚 知覚 知覚 知覚」 」 」 」
「
「 「
「解釈 解釈 解釈」 解釈 」 」 」
「 「
「 「評価 評価 評価 評価」 」 」 」
行行行行 動動動動
行 行 行
行 動 動 動 動 選 選 選 選 択 択 択 択
図 2.2: 活性化サイクル
う行動では各行動において個人ごとに予測増加量は求められる.この予測増加量が 最大となるような行動と行動対象を行動選択の結果として決定する.
第 3 章 活性量と行動選択の定式化
3.1 活性量
2章において述べた活性の定義を用いて,活性量の定式化を行う.
活性量をA,活性要素の値をeとして以下の式のような線形結合として表現する.
Atask = α1e1+α2e2+· · ·+αnen (3.1) 活性要素の値eはセンサ情報から計算され,互いに独立であるものを定めることが望 ましい.α は各コミュニケーション活性要素ごとの重みであり,実験的に妥当な値を定 めてゆく.
3.2 行動選択
以上の活性量の式を用い,ロボットがどのように行動を決定するのか,行動選択の定 式化を行う.
ロボットの選択すべき行動はすなわち,活性量を最大化させるような行動パターンと 対象となる個人を選択することであり,そのためには行動によってどの程度活性量が増加 するか予想しておくことが必要である.その予想される活性量の増加量を∆Aとおくと,
∆A =ftask(Behaviori,Personj) (3.2) このときftaskは行動と行動対象による活性量の評価関数であり,タスクに依存する.
このftaskを用いて,ロボットは∆Aを最大化するような行動と行動対象を選択すること になる.
argmax
i,j
ftask(Behaviori,Personj) (3.3)
ここで,ある行動iは特定の活性要素に対して働きかけるものとすると,それによる効 果はnを活性要素の数として以下のようなベクトルとして表現できる.
βi = (
β1i β2i · · · βni )
(3.4) また活性要素の値はセンサ情報から計算されるので,センサによる観測値をx,対象と なる人の数をN とすると,
ek = gk(xk) (3.5)
el = hl(x1l, x2l,· · · , xNl ) (3.6) のように表せる.(5)式は場全体の情報から得られる活性要素の値,(6)式は個人の情報 から得られる活性要素の値である.このときg(x)には以下のような関数が考えられる.
g(x) = {
1 if x > a
0 otherwise (3.7)
g(x) = a(1−e−x/b) (3.8)
また,(6)式におけるh(x)は個人の情報の和として,
h(x) = ∑
N
g(xi) (3.9)
と表せる.よってこのとき,行動を行った前と後の活性量をそれぞれAbefore,Aafterと すると,∆Aに関して以下のような一例を示すことができる.
∆A=Aafter−Abefore (3.10)
Abefore = α1h1(x11,· · · , xj1,· · · , xN1 )
+α2g2(x2) +· · ·+αngn(xn) (3.11)
Aafter = α1h1(x11,· · · ,xj1+β1i,· · · ,xN1 )
+α2g2(x2+β2i)+· · ·+αngn(xn+βni) (3.12)
第 4 章 タスクの設定
4.1 難読ゲーム
今回設定するタスクとして,前述のような高齢者施設でリクリエーションの時間に行 われる「難読ゲーム」を取り上げる.難読ゲームとは,ホワイトボード等に書き出された 読み仮名の難しい漢字の読み仮名を答えるゲームであり,問題を出題する司会者と複数 人の解答者の存在するコミュニケーションモデルととらえることができる(図4.1).こ こでは難読ゲームの以下の5つのフェーズに分けて考える.
(1) 集合
(2) ゲーム開始 (3) 出題
(4) 答え合わせ (5) 終了
図 4.1: 難読ゲームタスク
解答者が集合した後,司会者の合図でゲームが開始される.司会者が問題を出題し,解 答者が挙手して解答していく.正解を解答出来た場合や問題が難しく誰も答えられない 場合には答え合わせを行う.そしてまた問題の出題・答え合わせを繰り返す.予定してい た問題を出し終えたら司会者の合図でゲームを終了させる.ここでは特に活性化におい て重要な(3)出題と(4)答え合わせのフェーズに注目する.
4.2 難読ゲームにおける活性量
今回の難読ゲームのタスクにおいては,活性要素を以下のように定義する.
• ゲームへの参加度 - 回答数
- 熟考度(タスクルール)
- 注意度(タスクルール)
• ゲームの満足度
- 笑顔-顔をしかめる の頻度 - 頷く-首をひねる の頻度
• 会話の円滑度 - テンポ感 - 発話頻度
- 発言権の均等性 等
よってコミュニケーション活性量の(3.1)式は,次のように書き直せる.
ANandoku = α1(参加度) +α2(満足度)+α3(会話円滑度)
今回は,ゲームへの参加度として「熟考度」と「注意度」を表情の変化量から算入,ま たグループコミュニケーションの円滑度として「テンポ感」を無音区間から,「発話頻度」
として発話区間のパワーをそれぞれ算入する.
4.3 行動パターン
難読ゲームタスクにおいて選択される行動は,以下のようなパターンを準備した.
(a)Ask Someone
対象ユーザごとの参加度が低い場合,特定の人に発言を促す.
(例)「〜さん,どうですか?」
(b)Hint
全員が黙り込んでしまう(会話量が少ない)場合,司会にヒントを要求する.
(例)「ねえ,何かヒントください.」 (c)Break Silence
全体が静寂時間が長い場合,静寂を破る行動を取る.この行動はさらに以下のように 細分化される
• 独り言を言う.(例)「難しいよ.」
• 道化を演じる.(例)「おっぱっぴー.」
4.4 個人性の考慮
ゲームを色々な人に楽しんでもらうためには,その人の性格を無視することは出来な い.例えば,話好きな人には沢山話しかけた方が活性化される度合いは大きいことが期 待出来るが,あまり好きでない人にとっては却って逆効果になってしまうことから頻度を 下げる,もしくは対応をやわらかくするなどの配慮を加えたい.そのために,個人のモ デルを予め用意しておき,それによって対応や優先順位を決める枠組みを導入した.た だしそれぞれの参加者の着席位置は予め知っていることとする.
第 5 章 システム概要
5.1 提案アーキテクチャ
以上の枠組みを実装するためのシステムとして,図 5.1のような構成が考えられる.図 のようにグループコミュニケーションに共通の行動や反射的行動もまた重要な要素である が,この中でも今回は特定のタスクに依存した活性化行動(Activator)に注目し,具体 的には図5.2のようなアーキテクチャを提案する.下層よりセンサモジュール群と認識プ ログラム群および反射行動層,その上層に判断モジュール群と個人モデルのデータベー ス,さらに行動パターンを定義した行動モジュール群による積層構造として構成される.
Behavior Set
Sensor Reaction
Activator
Group Communication
Executive Decision
Actuator (Executes Behavior) Sensor
Info.
Used Behavior
Evaluated Behavior
Elected Behavior
Behavior Set Behavior Set
Sensor Reaction
Activator
Group Communication
Executive Decision
Actuator (Executes Behavior) Sensor
Info.
Used Behavior
Evaluated Behavior
Elected Behavior
図 5.1: システム全図
図 5.2: 提案アーキテクチャ
5.1.1 センサモジュール群
ロボットに搭載されたカメラと複数のマイクによって,ゲームの進行に独立して常に 環境の情報をセンシングする.
司会者の音声認識
司会者の身につけるヘッドセット型マイクを通して「難読ゲームはじめます.」や「正 解です」 等の発話を音声認識[13]によって取得し,ゲームの進行を制御する.
発話区間検出
静寂時間の判定と全体の会話量検出に用いる.無音区間を検出すると同時に,単位時 間当たりの発話区間の割合を会話量として測定する.
話者認識
話者モデルを予め学習しておくことで話者を認識する.主に反射行動層において,ど のユーザに呼ばれたかを判別する際等に参照される.
表情の画像情報
個人ごとの参加度の測定に用いる.まず顔領域の切り出し,その領域内での動作量(オ プティカルフロー)を表情の変化量として取得する.取得の際はユーザごとにロボット が顔を向け,必要なフレーム数を取得したら次のユーザを向くようにする.
5.1.2 判断モジュール群
各判断モジュールは,タスク依存性を有し,タスクごとに必要な行動モジュールの セットを切り替える.難読ゲームにおける行動選択はここで行われる.なお,本研究で は判断モジュールの切り替えは,外部からの指示器等によって行われることを想定して いる.
5.1.3 反射行動層
ユーザ(司会者,解答者)に呼ばれたときに振り向いたり,周囲の安全性確保やロボッ ト自身の安全確保等の反射行動層を配することで,状況に応じて行動の抑制や,逆に判 断モジュール層から反射行動の抑制等を行えるようにする.
5.1.4 行動モジュール
実際に行動が記述されているモジュールである.1つの行動につき1つの行動モジュー ルが割り当てられている.個々のモジュールにはそれぞれ特定の活性要素に与えると仮 定される効果のベクトルを持っており,これにより判断モジュールにて活性量の予想増 加量が計算される.このモジュールを実行することによって,出力としてロボットの動 作が得られる.今回は,行動ごとに特定の活性要素の増加量を手動で設定した.
5.1.5 個人モデル
判断モジュール群は,適宜ユーザごとの個人モデルを参照する.モデル内には,ユー ザの性格のタイプ(話好き・嫌い,ゲーム好き・嫌い等),各タスクで必要となるユーザ ごとの各種パラメタ等が保存されており,これらの値によって判断モジュールにおける センサ情報の解釈が変化する.
図 5.3: 個人モデル
5.1.6 環境マップ(グラフィカルユーザインタフェース)
上記のアーキテクチャに加えて,センサモジュール群を通して常時取得される環境情 報(システムの内部状態)を可視化するグラフィカルユーザインタフェース・モジュー ルを実装した.(図5.4).ここでは各ユーザの活性量や全体の活性量等が3DCGによって リアルタイムに反映され,システムの透過性向上やゲームコンテンツとしての演出効果 をもたらす.ただし,行動による活性化の様子を観察するため,以下の実験の際には用 いなかった.
このグラフィカルユーザインタフェースは,ロボットのアクチュエータと切り離して 独立したキャラクタエージェントシステム,すなわちヴァーチャル型ロボットとしても 使用できる.将来的に実体型のロボットとこのヴァーチャル型ロボットをシームレスに
図 5.4: 環境マップ(グラフィカルユーザインタフェース)
連携することで,多彩なサービスを提供するネットワークロボット [5]としても使用でき る.とりわけ遠隔地との通信等には有効であると考えられる.
また,用途やパラメータが多岐に渡るコミュニケーションロボットの外観デザイン決 定プロセスにおいて,リアルタイムにユーザとインタラクションしながらデザインを検 討できるコミュニケーションロボット用デザイン支援システムとしても今後拡張してゆ く予定である.
第 6 章 実験
実験室において複数回難読ゲームを遂行し各活性要素の適当な重みαを設定した上 で,ロボットが行動したことによる活性化の観察と課題の発見を目的として高齢者施設 でフィールド実験を行った.
6.1 実験場所
東京都小平市の高齢者施設「ケアタウン小平」にて2007年12月に実施した.ケアタウ ン小平は賃貸住居機能,医療・看護・介護・食事サービス機能,デイケアサービス(来所 者同士で活動や交流を図る)機能等を有し,それぞれ複数のNPOによって運営されるコ ミュニティケアの中核的複合施設である.
6.2 被験者
被験者は主解答者として高齢者3名(比較的健常な方2名,難聴傾向の方1名),およ び周囲の参加者としてその他の高齢者10名弱,ケアスタッフ10名弱,実験者4名の 計約20名である.実験の様子は3台のビデオカメラ(被験者の表情,全体の様子,ロ ボットの視覚)で記録し,実験後にケアスタッフにインタビューを実施した.
6.3 実験ハードウエア
実験ハードウエアとして,音声対話ロボットROBISUKEを用いた(図6.2).
6.4 実験条件
(1)司会者(学生=素人)のみの場合
図 6.1: 実験の様子
3名の参加者と司会者役として学生1名にて難読ゲームを5問,10分弱行った.な お司会者役の学生は高齢者施設での場の活性化に関して全くの素人である.周囲の参加 者にも事前説明は特に行わなかった.
(2)司会者(学生)とスタッフ(専門家)の場合
条件(1)に加えて活性役としてケアスタッフ1名に参加してもらった上で,同様に難読 ゲームを5問,10分弱行った.
(3)司会者(学生)とロボットの場合
条件(3)のケアスタッフに代わってロボットを置き,同様に難読ゲームを5問,10分 弱行った.この際,ロボットの行動に関する事前説明は行わなかった.
図 6.2: 音声対話ロボットROBISUKE
図 6.3: 実験条件(1)(司会のみ)
図 6.4: 実験条件(2)(司会+ケアスタッフ)
図 6.5: 実験条件(3)(司会+ロボット)
6.5 結果
6.5.1 ビデオ分析
記録したビデオからコミュニケーション活性化に関して3条件を比較するため,視線移 動頻度(司会と問題,ロボット,その他),発言頻度,笑顔の頻度について分析を行った.
まず,条件(1)司会者(学生=素人)のみの場合は,司会役が不慣れであることもあり 場の雰囲気は硬く,時間当たりの発言率は極めて低く,笑顔の頻度もほぼ0に近い結果を 示した.一方,条件(2)(司会+ケアスタッフ)の場合は雰囲気が一変し,すべての参加 者に関して視線移動頻度,発言率,笑顔の頻度すべて向上した.定性的にも差は歴然で あった.さらに条件(3)(司会+ロボット)の場合は,条件(2)には及ばないものの,条 件(1)に比較するとほとんど見られなかった発言や笑顔がすべての参加者に見られた.定 性的にも明らかに条件(1)より活性していたのが確認できた.
6.5.2 インタビュー
実験後,課題発見のためにケアスタッフにインタビューを行った.
図 6.6: 結果(1)(司会のみ)
図 6.7: 結果(2)(司会+ケアスタッフ)
ロボットが人と人のコミュニケーションを仲介するというコンセプトは概ねケアの現 場のニーズに近いという評価をいただいた.ケア施設は一種のエンターテインメントの 場であり,今後ロボットに期待することはコミュニケーションの口火を切ることである ことを示していただいた.またボーっとした空白の時間をつくらないことは活性化の上
図 6.8: 結果(3)(司会+ロボット)
では重要であるとのことだった.
また司会のポイントとしては,興味のひくヒントを与えることや場にいる全員にフォー カスが当たるように振舞うことと,参加者個人の情報に基づく発言を心がけることであ るというコメントをいただいた.そのためには参加者個人ごとの下調べが必要であり,そ れに伴う会話の展開が求められる.
さらに,発展的な課題として難聴の方への対応が挙げられた.訪問時およそ40%近 くの方が難聴傾向にあり,難聴の方は音声の抑揚で話を聞くためロボットの平坦な音声 合成器では円滑なコミュニケーションには不足である.
6.6 議論
実験の結果が示すように,高齢者施設等において場の盛り上げ役として素人でも,ロ ボットと一緒にリクリエーションの時間を進行することで専門家に近い効果を上げられ,
新しいコミュニティに自然に入ってゆける可能性を示していると言える.
しかしながら,専門家とロボットには大きな隔たりがある.今回は発言を促す行動,司 会者にヒントを要求する行動,静寂を破る行動等のパターンを取り上げたが,それらは 概ね経験的に設定されたものであり,実験によって明らかになったように場を盛り上げ
るためにはその他の要因も極めて重要である.このとき,まずグループ対話の要件に加 えて人‐人コミュニケーション活性化の要件を踏まえ,その上で上でタスク独自の要件 を検討する必要がある.ロボットと複数人の存在するグループ対話においては,注視点 を共有したり現在の発話者を把握し,それをロボットが常に表出するべきであるとされ
てきた [11].しかし,人‐人コミュニケーション活性化行動に関しては未だ特定できてい
ない要件を残している.今後はそれらを再整理した上でこのようなゲームタスクに独自 な要件(必要な行動パターンやタイミング,その他の要件)について検討してゆく.
また一方で,このようなコミュニケーションロボットはゲームメディア,ゲームコンテ ンツとしても有効であり,情報機器に必ずしも明るくないユーザでも気軽に参加できる システムになりうる可能性を示していると言える.
第 7 章 今後の課題
発話要求への対応
コミュニケーションを活性化させるためにはゲームに即した行動選択だけでなく,呼ば れた人の方向を向き,場合によってはそこから対話モードへ状態遷移する必要があるが,
現在のシステムでは数秒の無音区間を発話タイミングとして発話・行動選択するだけに なっており,ユーザの発話要求はほとんど想定されていない.今後このような発話要求 に対応してゆく.
話題の展開
ゲーム進行中や対話中に,場の状況に応じて興味の対象を示したり,ユーザごとの事前 情報や問題の解答に応じた発話を出力できる枠組みを検討する.
行動資源の分配
上記のように状態や行動パターン,反射行動等が増えてゆく中で,第5章の図5.1で示し たように,限られた行動資源を効果的に分配し効果的なタイミングで出力できるトータ ルなアーキテクチャを再検討してゆく.
難聴の方への対応
発展的課題として,難聴の方へ対応するために音声合成器の見直しや補助的な画面出力 等について検討する.
第 8 章 総括
高齢社会を背景として,人と人のコミュニケーションの活性化を支援するコミュニケー ションロボットシステムについて検討した.
まず具体的な例からコミュニケーションの活性について考察し「コミュニケーション活 性状態」,「コミュニケーション活性化」,「コミュニケーション活性量」,「コミュニケーショ ン活性因子」を定義した.活性量は活性要素から構成され,活性要素は大きく「(コミュ ニケーションへの)参加度」,「(コミュニケーションへの)満足度」,「会話円滑度」に分け られる.ロボットの行動選択は,常にこの活性量を最大化しうるように行動と行動対象 を選択する.具体的な対象タスクとしては高齢者介護施設にて行われている「難読ゲー ム」を取り上げ,「参加度」として回答数や注意度,「会話円滑度」としてテンポ感と発話 頻度を,センサ情報を元に活性量に算入した.選択される行動パターンはAsk Someone
(特定の人に発言を促す),Hint(ヒントを要求する),Break Silence(静寂を破る)な どの行動を用意した.これらを実現するシステムのアーキテクチャは,センサモジュー ル群,判断モジュール,行動モジュール群,個人データベース,環境マップ(グラフィカ ルユーザインタフェース)から構成した.
これらを実装した上で,実装したシステムを用いて高齢者施設「ケアタウン小平」で フィールド実験を実施した.実験条件として,被験者3名に対して(1)司会者(学生=素 人)のみの場合,(2)司会者(学生)とスタッフ(専門家)が盛り上げ役として参加した 場合,(3)司会者(学生)とロボットの場合の3条件で行い,特に被験者の発言率と笑顔 の頻度を比較すると,ロボットがコミュニケーションの活性化に有効であったことを示 せた,また情報機器の操作に必ずしも慣れていない人を含む多くのユーザに対してゲー ムメディアとしても有望なシステムになりうる可能性を見出せた.
しかしながら,専門家と比較すると多くの課題が残っている.今後は人と人のコミュ ニケーションを活性化させる行動についてさらに詳細に分析し,実際の現象に即したよ り効果的な行動選択の枠組みを検討してゆく.
謝辞
本研究の着手および方針について多くの御指導,御助言を頂きました小林哲則教授に 心から感謝致します.
研究の方針など様々な面で御指導,御助言を頂いた早稲田大学高等研究所 藤江真也助 教,また共同研究者である理工学部4年の赤池辰介君,両氏の協力がなければこの研究 は成し遂げられませんでした.ここに深く感謝致します.
本研究は,「NEDO戦略的先端ロボット要素技術開発プロジェクト 高齢者対応コミュニ ケーションRTシステム」および「早稲田大学グローバルCOEプログラム アンビエン トSoC教育研究の国際拠点」の支援を受けました.
また調査と実験の実施にあたっては,「NPO法人コミュニティケアリンク東京 ケア タウン小平デイサービスセンター」のご協力をいただきました.
最後に,経済的,精神的に支えていただいた祖父と両親に深く感謝致します.
参考文献
[1] 内閣府(編集),“平成19年版高齢社会白書,” 2007.
[2] 山崎章郎,“病院で死ぬということ―そして今、僕はホスピスに,” 文藝春秋,1996.
[3] 日本ホスピス緩和ケア協会,http://www.hpcj.org/.
[4] 牧野節子,“さびしくないよ―翔太とイフボット,” 岩崎書店,2006.
[5] 総務省(編集),“「ネットワーク・ロボット技術に関する調査研究会」報告書,” 2003.
[6] 伊吹征太,木村憲次,武田夏佳,“コミュニケーションロボットを用いた高齢者生活 支援システム,”日本機械学会誌,Vol.108,No.1038,pp.392-395,2005.
[7] 和田一義,柴田崇徳,谷江和雄,“介護老人保健施設におけるロボットセラピー−実験 一年目における効果の評価,計測自動制御学会,” 計測自動制御学会論文集,Vol.42,
No.4,pp.386-392,2006.
[8] 神田崇行,石黒浩,小野哲雄,今井倫太,前田武志,中津良平,“研究用プラット ホームとしての日常活動型ロボット Robovie の開発,”電子情報通信学会論文誌,
Vol.J85-D-I,No.4,pp.380-389,2002.
[9] 中田 崇行,石黒 浩,“対話型ヒューマノイドロボットからの日常生活の中の友達関 係の推定,”情報処理学会,2004.
[10] 神田崇行,平野貴幸,ダニエルイートン,石黒浩,“日常生活の場で長期相互作用す る人間型対話ロボット,” 日本ロボット学会,2004.
[11] 松坂要佐,東條剛史,小林哲則,“グループ会話に参与する対話ロボットの構築,”電 子情報通信学会論文誌,Vol.J84-D-II,No.6,pp.898-908,2001.
[12] 中野鐵兵, 藤江真也, 小林哲則,“MONEA: 効率的多機能ロボット開発環境を実現 するメッセージ指向ネットワークロボットアーキテクチャ,” 日本ロボット学会誌,
Vol.24,No.4,pp.543?553,2006.
[13] 柴田大輔,“ワンパストライグラムデコーダにおける単語履歴の束ね処理に関する検 討,”日本音響学会秋期講演論文集,pp.151-152,2002.
[14] Masahiro Shiomi,Takayuki Kanda,Hiroshi Ishiguro,Norihiro Hagita,Interactive Humanoid Robots for a Science Museum,Human-Robot Interaction 2006.
[15] C. Breazeal, C. Kidd, A. L. Thomaz, G. Hoffman, M. Berlin, Effects of Nonver- bal Communication on Efficiency and Robustness in Human-Robot Teamwork. Pro- ceedings of IEEE/RSJ International Conference on Intelligent Robotis and Systems, 2005.
[16] Kotaro Hayashi, Daisuke Sakamoto, Takayuki Kanda, Masahiro Shiomi, Satoshi Koizumi, Hiroshi Ishiguro, Tsukasa Ogasawara, Norihiro Hagita, Humanoid robots as a passive-social medium: a field experiment at a train station, IEEE Human Robot Interaction, 2007.
[17] Robot Therapy in a Care House - Its Sociopsychological and Physiological Effects on the Residents, Kazuyoshi Wada,Takanori Shibata,ICRA 2006.
[18] Socially Assistive Robotics in the Treatment of Behavioural and Psychological Symp- toms of Dementia, Patrizia Marti, Margherita Bacigalupo, Leonardo,Giusti and Claudio Mennecozzi,Takanori Shibata,BioRob 2006.
[19] Effects of Robot Therapy for Demented Patients Evaluated by EEG,IROS,2005.
[20] Takayuki Kanda, Takayuki Hirano, Daniel Eaton, Hiroshi Ishiguro,Interactive Robots as Social Partners and Peer Tutors for Children: A Field Trial,Human- Computer Interaction, 2004.
付録
ペルソナ(シナリオ)法によるニーズ分析
登場人物
主要ペルソナ 高齢者1(93歳女性):聴覚に若干の衰えがあるが,特に大きな病気 を持たない元音楽教師.週2回ケアタウンに通うことを心から楽しみにしている.
高齢者2(89歳男性):手先足先に若干の不自由があるが,特に病気もなくコミュニ ケーション能力も衰えていない.元技術者.
高齢者3(78歳女性):末期ガン患者.病院を退院し,いたずらな延命よりも,限ら れた命を全うしようと,ホスピスケアを受けることにした.
高齢者4(69歳女性):ケアセンターでもベッドに横になっていることが多いが,積 極的にコミュニケーションの輪に参加しようとする意欲がある.
ケアマネージャー(47歳男性):NPO法人早稲田デイサービスセンター代表理事.
ケアスタッフ1(40歳女性):NPO法人早稲田デイサービスセンター常勤スタッフ.
ケアスタッフ2(35歳女性):NPO法人早稲田デイサービスセンター常勤スタッフ.
ケアスタッフ3(27歳女性):NPO法人早稲田デイサービスセンター常勤スタッフ.
ボランティアの学生(20歳男性):現在,社会福祉学部2年生.週2回ケアタウンに ボランティアとして通っている.
高齢者1の長女(65歳女性):主婦.友人からケアタウンの素晴らしさを聞き,母 を入居させることを決めた.
ロボット1:体操の実演や,レクレーションのアシスタントをする.
ロボット2:来所者たちを見回り,会話の輪に参加していない人に声をかける.会話の 仲介なども行う.TA役.
「コミュニケーション支援ロボットのある風景」
〜ある日のケアタウン早稲田〜
10:00 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
集合(スケジューリングタスク)
現在,ケアタウンのデイサービスには健常者,障害者問わず100名以上が登録して おり,毎日10数名ずつ通ってくる人たちに対応している.もともとホスピス理念に基 づきチームケアを行っていることもあり,ガンの末期の人や,神経難病を患い余命幾ば くとないうえその命の永さもわかっている人達も来所してくる.
今日もケアタウンに通ってくる人たちのために,スタッフが準備をしている.
高齢者1,娘の自家用車でケアタウンに到着する.
ロボット,高齢者1が入室したことを認識する.
ロボット「〜さん,おはようございます.」 ケアスタッフ1「ああ! 〜さん久しぶり!」
高齢者1「おはよう!」
ケアマネージャー「わー,〜さん久しぶり!やっぱりここには,〜さんが居 てくれないとね!」
皆,続々と集まってくる.ケアマネージャー,ロボットに質問する.
ケアマネージャー「今日は,まだ来る人がいるかな?」
ロボット1「〜さんが,来ます.」
10:30 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
体操(実演タスク)
![図 1.1: 平成 19 年度版 高齢社会白書「高齢化の推移と将来推計」(内閣府) このようなケアの基本的な考え方として国内外で一般的に受け入れられているのは以 下のようなものがある [3]. ケアの要件 -5 項目 - (日本ホスピス緩和ケア協会) (1) 人が生きることを尊重し、誰にも例外なく訪れる死への過程に敬意をはらう。 (2) 死を早めることも死を遅らせることもしない。 (3) 痛みやその他の不快な身体症状を緩和する (4) 精神的・社会的な援助を行い、患者に死が訪れるまで、生](https://thumb-ap.123doks.com/thumbv2/123deta/9785926.1869174/7.892.110.783.118.648/平成としてなものホスピス生きる訪れるはらう早めるやその訪れる.webp)
![図 1.4: ロボットの市場規模予測 (日本ロボット工業会 ),2001 年 1.2.1 イフボット コミュニケーションロボットを用いた高齢者支援システムとして,ビジネスデザイン研 究所より 2003 年から実用化されてきたシステムである [4].人間からあえて遠ざけた宇宙 人風のデザインが採用されている(図 1.5).シリーズとしていくつかのバリエーション があり, 「ノーマルタイプ」は数万パターンの会話が登録されており,1対1の会話を楽 しむことができる.また,高齢者向けの「よりそいイフボット」は,高齢](https://thumb-ap.123doks.com/thumbv2/123deta/9785926.1869174/10.892.139.780.128.430/コミュニケーションロボットビジネスデザインバリエーション.webp)


![図 5.2: 提案アーキテクチャ 5.1.1 センサモジュール群 ロボットに搭載されたカメラと複数のマイクによって,ゲームの進行に独立して常に 環境の情報をセンシングする. 司会者の音声認識 司会者の身につけるヘッドセット型マイクを通して「難読ゲームはじめます. 」や「正 解です」 等の発話を音声認識 [13] によって取得し,ゲームの進行を制御する. 発話区間検出 静寂時間の判定と全体の会話量検出に用いる.無音区間を検出すると同時に,単位時 間当たりの発話区間の割合を会話量として測定する.](https://thumb-ap.123doks.com/thumbv2/123deta/9785926.1869174/29.892.107.783.110.626/アーキテクチャセンサモジュールロボットセンシングヘッドセット.webp)
![図 5.4: 環境マップ(グラフィカルユーザインタフェース) 連携することで,多彩なサービスを提供するネットワークロボット [5] としても使用でき る.とりわけ遠隔地との通信等には有効であると考えられる. また,用途やパラメータが多岐に渡るコミュニケーションロボットの外観デザイン決 定プロセスにおいて,リアルタイムにユーザとインタラクションしながらデザインを検 討できるコミュニケーションロボット用デザイン支援システムとしても今後拡張してゆ く予定である.](https://thumb-ap.123doks.com/thumbv2/123deta/9785926.1869174/32.892.111.786.107.504/マップグラフィカルユーザインタフェース.webp)

