高知高専専攻科特別研究論文集,第
8
号,pp.79-86,平成21
年3
月歩・車混合交通における車両挙動の評価に関する シミュレーション分析
長 崎 友 紀
Simulation analysis about evaluation of the behavior of the vehicles in the traffic that pedestrians and vehicles were mixed
Yuki NAGASAKI
In the Western countries to which the originality and creativity of safe and comfortable pedestrian space are enforced, hard techniques, such as a community road, are conducted as a speed regulation measure in the residential district. However, in our country, the present con- dition is that the community road etc. are limited to some areas. So, in this research, the pos- sibility and the subjects for creating of safe and comfortable pedestrian space by consideration of a vehicles driver were verified. The concrete details of research modeled the driving opera- tion of the vehicles which carries out a safety run and a dangerous run in the traffic that pede- strians and vehicles were mixed. And in order to search for the burden by increase in the driving time of the vehicles per km, the deceleration frequency and acceleration frequency, etc., simulation analysis was conducted by making pedestrian traffic and oncoming car traffic into a parameter.
Key words : The traffic that pedestrians and vehicles were mixed, Behavior of the vehicles, Driving safety and dangerous, Driving time, Estimated equation
1.緒 言
1.1 我が国,及び高知県における道路状況
交通事故を防止するためには,速度帯の異なる自動車 や自転車,歩行者の通行帯を分離することが有効である とされている.しかし我が国の道路幅員は狭く,平成
9
年度の「高知県の新たな道路整備計画中間報告書」によ ると,道路改良率(車道幅員5.5m
以上の延長/実延長)は全国平均約
51%
,高知県平均約36.8%である.車道幅
員5.5m
未満の道路は大型車のすれ違えない道路とされ ており,高知県では県道の約7
割,市町村道の約9
割弱 が未改良である.また,一般に幅員8m
未満の道路は歩 道を設置することが困難な狭幅員道路に分類され,歩車 混合交通となっている.交通事故の統計資料などによる と,狭幅員道路では交通量の多い広幅員道路のように事 故多発地点として特定化されないものの,総延長は長く その累積事故件数は多い.道路環境の整備とともに,道路利用者の安全な運転・
通行が望まれる.また,道路利用者の挙動を把握し,道
路利用の促進と交通安全のための誘導や規制をすること も必要である.近年の標準歩道幅員の拡幅を盛り込んだ 道路構造令の改訂や公共交通機関の利用促進施策は,歩 行者重視の傾向を示している.
大型車が道路幅全体を使ってすれ違うことのできない 幅員
5.5m
未満道路の多い我が国,あるいは高知県では,すべての道路を拡幅することは困難であり,道路網の段 階的構成の構築を目指す一方,車両の運転者は今まで以 上に文明の利器の魅力を抑制し,歩行者等の通行を優先 した(意識した)運転操作が望まれることになる.
本研究では,車両運転者の意識による安全で快適な歩 行者空間の創意工夫の可能性を探ることを目的として,
自動車が歩行者の通行する狭幅員道路を速度規制に従っ て安全走行及び危険走行する交通状況のモデル化を検討 した.過去のアンケート調査結果等を参考に,安全,及 び危険な運転操作を定義し,車両の
1km
当たりの走行 所要時間や減速回数などを求めた.1.2 歩車共存計画の事例
歩車共存道路は,歩行者空間や公園を組み合わせ,車
高知高専専攻科特別研究論文集,第
8
号,pp.79-86,平成21
年3
月道部分を蛇行させ自動車の速度を抑えることで歩行者と の共存を図る道路である.また,交通への整備効果以外 にも,電線類の地中化や諸設備設置等により景観,防災 の向上を図る.
歩車共存計画の事例の一つとして「ボンエルフ」があ る.ボンエルフとは,人と車の共存を目的にした道路整 備形態のひとつである.
1970
年代にオランダのデルフト という街で初めて導入された方式で,人間が対応できる速度(約
15km/h
)以上に車がスピードを出せないような構造になっている. 例えば,車の通路を一車線(一 方通行)にし,乗り越えなければならないハンプ(出っ 張り)を設けるなど,また,車が直進してスピードを出 せないようにカーブを設けている.さらに,路上駐車ス ペースも設けることも車の減速を促す方法としてボンエ ルフのなかに取り入れられている.
ボンエルフの道路は,様々な形で車のスピードが出な いような工夫がなされているため,ドライバーにとって は「走りにくい」という印象もあるようだ.
しかし,ボンエルフが施されている街は人と車の「共 存」が大前提となっているため,ドライバーにはその街 に生活する歩行者への思いやりをもってゆっくり走るこ とが求められている.
1.3 狭幅員道路1km区間における車両走行シミュレ ーションモデルの概要
歩道の設置が困難な狭幅員道路,つまり歩車混合交通
1km
区間において,歩行者と対面通行車両は,任意に仮 定した歩行者交通量(人/h)と対面自動車交通量(台/h)
を基にポアソン分布であるとして発生させた.なお本研 究では,歩行者の安全は運転者の安全運転操作によって 確保されるものとして歩行者を背面から追い抜く(追い 越す)ものとした.
歩行者交通量(人
/h
)が大となるほど1km
当たりの減 速回数と走行所要時間は大となる.対面自動車交通量(台/h)が大となるほど,歩行者追随回数は大となる.また,
歩行者が追随視距(歩行者の歩行速度まで減速に要する 距離)の範囲内にいない場合,車両は規制速度
V0
で走 行するものとした.2.狭幅員道路における車両走行所要時間の分析シ ミュレーション
本研究では,路側帯の拡幅と速度規制を目的として,
自動車が,歩行者の通行する狭幅員道路を,速度規制に 従って安全,及び危険走行する交通状況のモデル化をし,
走行所要時間,減速回数などの変化を比較,検討した.
2.1 安全,及び危険な運転操作の定義 2.1.1 安全運転操作の定義
狭幅員道路を対象とした,車両の安全走行を,過去の アンケート調査結果等を参考に,次のように定義した.
①歩行者を追い抜く(追い越す)場合,自動車の速度は
20km/h(Vb)以下とする.
②追い抜き(追い越し)時の,歩行者との横方向間隔は
1.5m
程度以上とし,対向車が来ている場合は,車両は 追い抜き(追い越し)をせず,歩行者の歩く速度(Vp) で追随するものとする.③安全を確認した場合,自動車はできる限り規制速度
(Vo)に近い速度で走行するものとする.
④自動車の加速度・減速度は道路構造令を参考に,運転 者に不快感を与えない
0.2G(1.96m/s
2)一定とする.⑤なお,道路は歩道を設置できない狭幅員道路とする.
2.1.2 危険運転操作の定義
同じく,車両の危険走行を次のように定義した.
①歩行者発見時に,車両は減速しないものとする.
②追い抜き(追い越し)時の速度は規制速度のまま,ま たは規制速度まで加速しながら行うものとする.
以下,
2.1.1
安全運転操作の定義②〜⑤と同様とする.なお,危険走行時のシミュレーション結果は安全走行時の ものとの比較を目的とする.
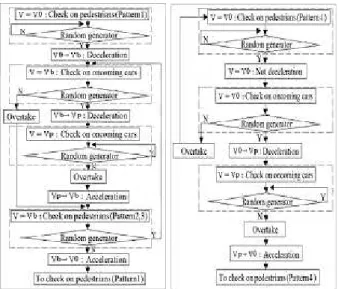
2.2 プログラムの流れ図
プログラムでは,流れ図に沿って反復し,累積走行距離 が
1km
に達した時点の所要時間を出力するようになっ ている.プログラム言語はBASIC
を用いた.2.2.1 安全走行時のプログラム
安全な運転操作の定義に従った
1km
走行所要時間算定 プログラムの流れ図をFig. 2.1
に示す.①『歩行者確認パターン1』(
2.3
に示す)に従って,乱 数を発生させる.②乱数発生後,歩行者が発見されなければ,再び①に戻 り同様に乱数を発生させる.
歩行者が発見されれば,V0から
Vb
に減速する.③『対向車確認パターン』(
2.4
に示す)より乱数を発生 させ,対向車がなければ,速度Vb
で歩行者を追い抜き,⑤に進む.対向車を発見した場合,速度を
Vb
からVp
へ減速させ,歩行者追随を行う.④『対向車確認パターン』(2.4に示す)より乱数を発生 させ,対向車を発見した場合,再び『対向車確認パター ン』より乱数を発生させる.対向車が発見されない場合,
歩行者を速度
Vpから Vb
に加速させ,追い抜きを行う.⑤速度
V=Vb
の状態で『歩行者確認パターン2,3』より
乱数を発生させ,歩行者が確認されれば,③の対向車を 発見した場合に進む.確認されなかった場合,Vb からV0
に加速し,再び①の『歩行者確認パターン1』
に進む.2.2.2 危険走行時のプログラム
危険な運転操作の定義に従った
1km
走行所要時間算 定プログラムの流れ図を,Fig. 2.2に示す.①『歩行者確認パターン
4』に従って,乱数を発生させ
る.②乱数発生後,歩行者が発見されなければ,再び①に戻
高知高専専攻科特別研究論文集,第
8
号,pp.79-86,平成21
年3
月Fig. 2.1 Flowchart of driving safety Fig. 2.2 Flowchart of driving dangerous り同様に乱数を発生させる.歩行者が発見されても,減 速は行わない.
③『対向車確認パターン』(
2.4
に示す)より乱数を発生 させ,対向車がなければ,速度V0
で歩行者を追い抜き,⑤に進む.対向車を発見した場合,速度を
V0
からVp
へ減速させ,歩行者追随を行う.④『対向車確認パターン』(
2.4
に示す)より乱数を発生 させ,対向車を発見した場合,再び『対向車確認パター ン』より乱数を発生させる.対向車が発見されない場合,速度
Vp
からV0
に加速させ,歩行者を追い抜く.⑤速度
V=V0
の状態で,再び①の『歩行者確認パターン4』に進む.
なお,安全走行時,危険走行時ともに,車両の走行距
離が
1000m
に達した時点でプログラムを終了し,この操作を
1000
回反復させて得られた1000
個のデータをシ ミュレーション結果として扱うものとする.また,本研究で使用したプログラムでは,自動車の前 方の任意の区間において,歩行者が
a
人現れる確率をポ アソン分布で表現し,P(X=a)=e
-TP×(TP
a/a!) (2-1)
としている.ここで,前方の任意の区間内の歩行者確認をする場合 を,シチュエーションごとに
4
つに分け,それぞれにお ける歩行者発見確率を求める.ただし,自動車の状況に よるそれぞれの速度は次のように設定した.V0=40km/h:通常走行時の速度.
Vb=20km/h
:自転車程度の速度.歩行者追い抜きの時の速度.
Vp=4km/h:歩行者程度の速度.歩行者追随走行時の速
度.また,自動車の加・減速度は
0.2G
とした.これは,道路構造令に示されている「運転者に不快感を与えない 程度の加・減速度」を採用した.
2.3 歩行者確認パターンとポアソン分布 2.3.1 歩行者確認パターン1
Fig. 2.3
は,歩行者確認パターン1
である.まず,「歩行者発見パターン
1」のシチュエーションとしては次の
ようになる.
Fig. 2.3 Check on pedestrians (Pattern1)
V0=40km/h
で走行中,Vb=20km/h, Vp=4km/h
まで 減速し,歩行者を安全に追い抜くのに必要な距離を,L
K=L0+L1+2×L2 (2-2)
とし,車両前方L
Km
の区間において歩行者の確認を行 う.区間内に歩行者が存在しなければ,ひきつづきV0=40km/h
で等速度走行,歩行者が存在すれば,L0m
の区間を
0.2G
にてVb=20km/h
まで等減速度走行をする.その後対向車の確認を行い,対向車が存在しなけれ ばそのまま
Vb=20km/h
の等速度走行で歩行者を追い抜 く.対向車が存在すればさらにL1
の区間を0.2G
にてVp=4km/h
まで等減速度走行後,歩行者よりL2m(安
全車間距離)後方を追随走行する.その間ひきつづき対 向車の確認を行い,対向車がなくなり次第,
0.2G
にてVb=20km
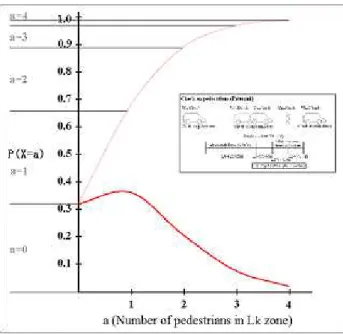
まで等加速度走行し歩行者を追い抜く.2.3.2 ポアソン分布
Fig. 2.4
に,歩行者確認パターン1
のポアソン分布を示す.ただし,歩行者の平均時間交通量
Qp
をQp=100
人/h ,歩行者速度VpをVp=4km/h
とした.この場合,歩行者密度
K
は,K=Qp/Vp=100/4=25
人/km(=2.5人/100m) (2-3) となる.ポアソン分布を求める歩行者確認区間LK
は,V0
からVb
に減速に要する区間L0
とVb
からVp
に減 速に要する区間L1,そして安全車等間隔の 2
倍2×L2
の3つの区間の和である.これらの区間の長さを求める 式は,次のようになる.L0=
{(V0/3.6)2-(Vb/3.6)2}/(2α)={(40/3.6)2-(20/3.6)2}/(2×1.96)
=23.62m (2-4) L1=
{(Vb/3.6)2-(Vp/3.6)2}/(2α)={(20/3.6)2-(4/3.6)2}/(2×1.96)
高知高専専攻科特別研究論文集,第
8
号,pp.79-86,平成21
年3
月=7.56m (2-5) L2=(Vp/3.6)+6=7.11m (2-6) LK=L0+L1+2×L2=23.62+7.56+2×7.11=45.4m (2-7)
従って,長さLKの区間に現れる平均歩行者数TPは,次のようになる.
TP=K×(LK/1000)=25×(45.4/1000)=1.135
人 (2-8) また,歩行者の現れる確率がポアソン分布で表現でき るとすれば,長さLK
の区間に歩行者がa
人現れる確率P
は次のようになる.P(X=a)=e-TP×(TPa/a!) (2-9)
そのうち,a=0
の確率は,P(X=0)=e-TP×(1/0!)=e-TP=e-1.135=0.3214 (2-10)
である.同様に,a=1;P(X=1)=P(0)×TP/1=0.3214×1.135=0.3648 (2-11) a=2;P(X=2)=P(1)×TP/2=0.3648×1.135/2=0.2070 (2-12) a=3;P(X=3)=P(2)×TP/3=0.2070×1.135/3=0.0780 (2-13) a=4;P(X=4)=P(3)×TP/4=0.0780×1.135/4=0.0220 (2-14)
例えば,0
から1
の一様乱数を発生させ,その値が0
から
0.3214
の範囲であれば,LK
の区間に歩行者はいないものとする.0.3214を超え
0.6862
の範囲であれば,LK
の区間に歩行者は1
人いるものとする.以下,同様 である.ただし,本研究では,歩行者の有無のみを確認 の対象とした.「歩行者発見パターン2,3,4
」のシチュエ ーションについても同様の手順でポアソン分布を用いる ものとする.Fig. 2.4 Poisson distribution of check on pedestrians (Pattern1)
2.4 対向車確認時のポアソン確率
なお,本研究では,対向車の平均時間交通量
Qv
をQv=100台/hとした.
この場合,対向車の交通密度Kは,K=Qv/V0=100/40=2.5
台/km(=0.25台/100m) (2-15)となる.対向車確認は,歩行者が前方の歩行者確認区間 にいる場合である.
そのうち,
V=Vb
の時,Vb
からVp
に減速に要する区 間L1
と安全車頭間隔の2倍2×L2
の距離を,(Vb-Vp)/3.6
の速度で通過する時間TV
が,ポアソン確率に用い る対向車確認時間である.従って,TV=(L1+2×L2) /{(Vb-Vp) /3.6}=21.7/{(20-4)/3.6}
= 4.883sec (2-16)
である.また,対向車の現れる確率がポアソン分布で表 現できるとすれば,時間間隔TV
に対向車がa
台現れる 確率P
は次のようになる.P(X=a
)=e-TV×Qv/3600×
{(TV×Qv/3600)a/a!} (2-17)
そのうち,a=0の確率は,P(X=0
)=e-TV×Qv/3600×(1/0!)
=e
-TV×Qv/3600=e
--0.135638888=0.87316 (2-18)
である.また,V=Vpで歩行者を追随している時,安全 車等間隔の2倍2×L2
の距離を,加速度0.2G
でVb
まで 加速しながら,あるいはVb
で等速走行して,通過する 時間TV
が,ポアソン確率に用いる対向車確認時間であ る.
Fig. 2.5 Time for passing pedestrians
Fig. 2.5
に,歩行者追い越し時の,速度と時間と距離の関係を示す.ここに,LA:車の走行距離L,LB:歩 行者の歩行距離,L1:速度
Vp
からVb
に加速に要する 距離,L2:速度Vb
で等速走行する距離である.加速(0.2G(m/s2
))しながら追い越しを開始し,速度 Vb
で 等速走行するとして,加速に要する時間をt1sec,加速
を完了してから,追い越しを完了するまでに要する時間 をt2sec
とすると,L1=(Vp/3.6)t1+0.5αt1
2L2=(Vb/3.6)t2
LA=L1+L2
,LB=(Vp/3.6)(t1+t2)LA-LB=2L2
となる.この場合,
Fig. 2.5
より,t1={(Vb/3.6)-(Vp/3.6)} /(02G)
=
{(20-4)/3.6}/1.96=2.268sec (2-19) L1=t1×{(Vb/3.6)+(Vp/3.6)}/2
=2.268×
{(20+4)/3.6}/2=7.56m<2L2=14.22m (2-20)
高知高専専攻科特別研究論文集,第
8
号,pp.79-86,平成21
年3
月であるので,
t2=(2L2-L1)/(Vb/3.6)=(14.22-7.56)/(20/3.6)
=1.199sec (2-21) TV=t1+t2=2.268+1.199=3.467sec (2-22)
となる.対向車の現れる確率がポアソン分布で表現でき るとすれば,対向車が現れないa=0
の確率は,P(X=0)=e
-TV×Qv/3600=e
-0.0963061=0.9082
である.(2-23)
3.走行所要時間のシミュレーション結果及び安全,危険走行時の比較検討
安全走行時,危険走行時におけるシミュレーション結 果を定量的に比較し,次の各項目について考察を述べる.
3.1 平均走行所要時間
対向車交通量,歩行者交通量を次表のようにそれぞれ 変化させたときの,安全,及び危険走行時における規制 速度別走行所要時間一覧を
Table 3.1
に示す.Table 3.1 Variation of driving time by Simulation
Safety Danger Safety Danger Safety Danger
0 90 90 120 120 180 180
20 124.2 90 143.4 120 180 180
70 141.4 90 158.9 120 180 180
100 145.9 90 162.7 120 180 180
0 90 90 120 120 180 180
20 127.8 96.6 147.4 124.6 184.6 184.6
70 147.4 100.5 166.1 128.8 188.7 188.7
100 152.7 101.4 170.9 129.8 190 190
0 90 90 120 120 180 180
20 132.5 103.5 153 130.7 190.8 190.8
70 154.8 110.3 175.4 138.4 200.1 200.1
100 161.2 111.7 181.3 140.3 202.4 202.4
0 90 90 120 120 180 180
20 138.5 110.1 159.6 137.1 198.2 198.2
70 164.2 119.7 186.4 148.9 213.4 213.4
100 171.6 122.2 193.6 151.7 217.3 217.3
Oncoming cars
(Number of oncomung
cars/h)
Pedestrians
(Number of Pedestrians/
h)
Average of driving time(sec)
V0=40km/h V0=30km/h V0=20km/h
0
100
200
300
歩行者交通量0人
/h
の場合を除く,比較パターン全24
通りにおいて,車両運転者の負荷となる走行所要時間の 平均は,安全走行時より危険走行時が全て短くなってい ることがわかる.これは,2.1危険な運転操作の定義① に示しているように,危険走行時には歩行者を発見した 時点では減速を行わない,というのが主な原因であると 考えられる.3.2 速度変化
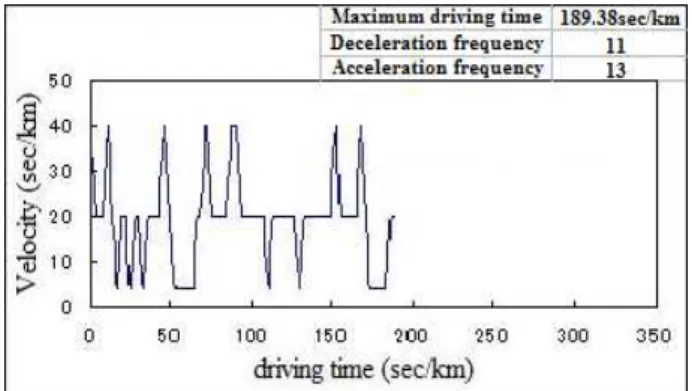
以下のシミュレーション結果については,規制速度を
40km/h,
歩行者の平均時間交通量を任意に仮定した100
人/h(交通密度
25
人/km)とし,対向車の平均時間交通
量をデンマークの交通抑制区域の事例である交通機能を 第1義的に考えるとしたQuiet Road Areas
のピーク時 時間交通量200台/h〜300台/hを参考に100台/h
とした 場合を示す.Fig. 3.1, Fig. 3.2
は,走行所要時間が最 大となったときのシミュレーション結果を,横軸を走行 所要時間,縦軸を走行速度として安全,及び危険走行時 の速度変化についてそれぞれ示している.危険走行時は,負荷となる減速回数及び,加速回数が
大幅に減少していることがわかる.以上のことは,危険 走行時には歩行者を発見した時点では減速を行わない,
というのが主な原因であると考えられる.
Fig. 3.1 Velocity variation of driving safety
Fig. 3.2 Velocity variation of driving dangerous
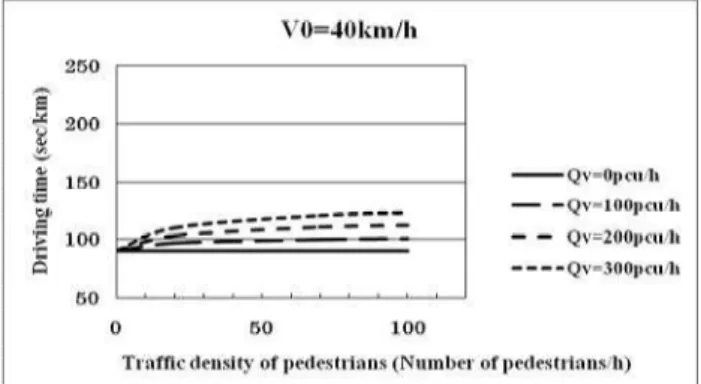
3.3 交通量と走行所要時間
Fig. 3.3,Fig. 3.4
は,横軸を歩行者交通量,縦軸を走行所要時間の負荷,対向車交通量をパラメータとしてそ れぞれ安全走行時,危険走行時についての変化を示した ものである.これらの図より,歩行者交通量の走行所要 時間の負荷への影響はともに安全走行時の方が大きくな っていることがわかる.また,対向車交通量の走行所要 時間の負荷への影響も同様のことが言える.
Fig. 3.3 Variation of driving time by traffic density (Driving safety)
高知高専専攻科特別研究論文集,第
8
号,pp.79-86,平成21
年3
月
Fig. 3.4 Variation of driving time by traffic density (Driving dangerous)
3.4 追い越し視距
追い越し視距は,安全な追い越しを行うために最低限 必要な,追い越し開始地点から進行方向への空間的安全 確認距離である.この間に対向車が存在する場合は追い 越しを始めてはならないものとする.
また,追越し視距が長いほど,特に道路への出入りの 多い住居系地域においては突発的な事象に出会う危険性 が高くなる.
Fig. 3.5 Visual distance for overtake of driving safety
Fig. 3.5
に安全走行時の追い越し視距を示す.2.3
に示す歩行者確認パターン
1
より,安全走行時での追い越し 区間距離は,Fig. 3.5
において,L1+L2×2
となる.この 間車両はVb
で走行するので追い越しに必要な時間は,(L1+L2×2)/(Vb/3.6)となる.
また,この間対向車が走行する距離は,V0 で走行し ているので,
L3=
(L1+L2×2)(Vb/3.6)/ ×V0 (3-1)
となる.車両が追い越しをかけている間,つまりセンターライ ンに寄っている,あるいはセンターラインからはみ出し ている間は,衝突の危険性があるため追い越し区間内に 対向車が侵入してはならない.従って追い越し開始時に は,予想される追い越し完了地点と対向車との間に
L3
以上の距離が必要である.安全走行時の追い越し視距
L4
は次のようになる.V0=30km/h
L4=
(L1+L2×2)+
((L1+L2×2)/
(Vb/3.6)×
(V0/3.6))=
(7.56+7.11×2)+
((7.56+7.11×2)(20/3.6)/ ×
(30/3.6))=54.45m (3-2) V0=40km/h
L4=
(L1+L2×2)+
((L1+L2×2)/
(Vb/3.6)×
(V0/3.6))=
(7.56+7.11×2)+
((7.56+7.11×2)(20/3.6)/ ×
(40/3.6))=65.34m (3-3)
次に,Fig. 3.6に危険走行時の追い越し視距を示す.
Fig. 3.6 Visual distance for overtake of driving dangerous
追い越し視距における定義は安全走行時と同様とする.
危険走行時での追い越し区間距離は,Fig. 3.6におい て,L0+L2×2となる.この間車両は
V0
で走行してい る.また,対向車の速度も
V0
であるので,追い越し区間 距離とL3
は等しくなる.従って,L3=L0+L2×2 (3-4)
となる.危険走行時の追い越し視距L4’
は次のようにな る.
V0=30km/h
L4’=(L0+L2×2)+L3=(L0+L2×2)×2 =(17.40+7.11×2)×2
=63.24m (3-5)
V0=40km/h
L4’=
(L0+L2
×2
)+L3=
(L0+L2
×2
)×2 =(31.18+7.11×2)×2
=90.80m (3-6)
V0
を40km/h,Vb
を20km/h
とする安全走行時の追越し視距は
65.34m
であるのに対して,V0,Vb を40km/h
とする危険走行時の追越し視距は90.80m
となり,安全走行時の約
1.4
倍となる.同様に,V0
が30km/h
の場合の安全走行時及び危険走行時の追越し視距はそれぞれ
54.45m,63.24m
となり,約1.2
倍となる.なお,V0
が20km/h
の場合,追越し視距は同じである.4.走行所要時間の影響要素の分析 4.1 走行所要時間の推定式の作成
ここでは,シミュレーションによって得られた,安全 走行,危険走行それぞれ
48000
件のデータから,走行所 要時間の推定式を検討する.なお,走行所要時間に影響を及ぼす要素(変数)は,
規制速度
V0,歩行者時間交通量 Qb
,対向車時間交通量高知高専専攻科特別研究論文集,第
8
号,pp.79-86,平成21
年3
月Qv
とし,一般式及び変数は以下の通りとする.一般式 : S = aV0+bQb+cQv+d (3-7) 変数 : S ;走行所要時間(
s)
V0
;規制速度(km/h)
Qb
;歩行者時間交通量(人/h)
Qv
;対向車時間交通量(台/h)
a, b, c, d
;係数検討方法としては,Fig. 4.1に示すように
Excel
を用 いた重回帰分析を行った.Fig. 4.1 Multiple regression analysis by Excel
以下のような推定式が得られた.なお,
Ss
は安全走行 時,Sd
は危険走行時のそれぞれ走行所要時間とする.Ss=-2.88044V0+0.436897Qb+0.062743Qv+215.5704 (3-8)
Sd=-4.49133V0+0.153182Qb+0.069318Qv+257.1512 (3-9)
安全走行時の走行所要時間の推定式Ss
と危険走行時 の走行所要時間の推定式Sd
の係数を比較すると,まず 定数については,Ss;215.5704<Sd;257.1512
となってい る.規制速度の係数については,安全走行時,危険走行 時ともに走行所要時間を減じる負の係数であり,Ss;-2.88044<Sd;-4.49133
となっていることから単位速 度あたりの走行所要時間の減少傾向は安全走行時より危 険走行時が大きくなることがわかる.歩行者時間交通量 の係数についてはSs;0.436897>Sd;0.153182
となり,歩 行者の影響による走行所要時間の増加傾向は危険走行時 より安全走行時が大きくなることがわかる.対向車時間 交通量の係数についてはSs;0.062743<Sd;0.069318
と なり,対向車の影響による走行所要時間の増加傾向は安 全走行時,危険走行時ともにほぼ同じく小さくなってい る.これは,歩行者がいる場合のみに対向車の影響を考 慮すると設定したことによる.4.2 シミュレーション結果と推定値の比較検討
推定式によって得られた推定走行所要時間の一覧を
Table 4.1
に示す.シミュレーションによって得られたものと比較してみると,多少の誤差はあるもののおおよそ 近い値が得られた.
Table 4.1 Variation of driving time (Estimated equation)
Safety Danger Safety Danger Safety Danger
0 100.4 77.5 129.2 122.4 158 167.3
20 109.1 80.6 137.9 125.5 166.7 170.4
70 130.9 88.2 159.7 133.1 188.5 178
100 144 92.8 172.8 137.7 201.7 182.6
0 106.6 84.4 135.4 129.3 164.2 174.3
20 115.4 87.5 144.2 132.4 173 177.3
70 137.6 95.2 166.6 140.1 194.8 185
100 150.3 99.7 179.1 144.7 207.9 189.6
0 112.9 91.4 141.7 136.3 170.5 181.2
20 121.6 94.4 150.4 139.3 179.2 184.3
70 143.5 102.1 172.3 147 201.1 191.9
100 156.6 106.7 185.4 151.6 214.2 196.5
0 119.2 98.3 148 143.2 176.8 188.1
20 127.9 101.4 156.7 146.3 185.5 191.2
70 149.8 109 178.6 153.9 207.4 198.8
100 162.9 113.6 191.7 158.5 220.5 203.4
0
100
200
300 Oncoming
cars
(Number of oncomung
cars/h)
Pedestrians
(Number of Pedestrians/
h)
Average of driving time(sec)
V0=40km/h V0=30km/h V0=20km/h
4.結 言
一般に交通事故を防止するためには,速度差の大きい 自動車や自転車,歩行者の通行帯を分離するべきとされ ている.本研究ではこの速度差に視点を置き,歩・車混 合交通の地域において,歩行者追い越し時には減速すべ きとし,この運転操作を望ましい安全運転と定義した.
しかしこの視点は,交通挙動のある瞬間における点の 視点である.連続した線の視点で車両の挙動を考察する ために,歩・車混合交通における狭幅員道路
1km
区間 における車両走行シミュレーションをモデル化した.歩行者の平均時間交通量を,任意に仮定した
100
人/h(交通密度
25
人/km)とし,対向車の平均時間交通量を,デンマークの交通抑制区域の事例である交通機能を第
1
義的に考えるとしたQuiet Road Areas
のピーク時時間交通量
200台/h〜300台/h
を参考に100台/h
とした場合の,各
1000
回の安全走行時,危険走行時におけるシミ ュレーション結果を定量的に比較,検討した結果,次の ことがいえる.①規制速度
30km/h
時及び,40km/h時のシミュレーシ ョン1000
回で,いずれの場合においても減速しない危 険走行時の走行所要時間は減速する安全走行時の走行所 要時間よりも全て短くなる.②規制速度
30km/h
時及び,40km/h時のいずれも,歩 行者交通量あるいは対向車交通量の増加による走行所要 時間の増加量は,減速しない危険走行時よりも減速する 安全走行時の場合が大きくなる.③規制速度
30km/h
時及び,40km/h時のシミュレーシ ョン1000
回で,いずれの場合においても減速しない危 険走行時と比較して減速する安全走行時には減速及び,加速回数が増加している.
高知高専専攻科特別研究論文集,第
8
号,pp.79-86,平成21
年3
月④規制速度
30km/h
時及び,40km/h時のいずれも,歩 行者交通量あるいは対向車交通量の増加による減速回数 の増加量は,減速しない危険走行時よりも減速する安全 走行時の場合が大きくなる.⑤規制速度
30km/h
時及び,40km/h時のいずれも,減 速する安全走行時の挙動は道路混雑時の運転操作となる 傾向を示している.道路混雑時のような運転操作は規制速度
30km/h
時及び,40km/h時による違いは現れなかった.しかし,歩行者追い越し時の速度
20km/h
に規制 速度を低減させた場合,安全走行時の挙動は道路混雑時 の挙動から危険走行時の挙動まで改善される.⑥走行所要時間の推定式から以下のことがわかる.規制 速度を大きく設定するほど,危険走行による走行所要時 間の減少傾向が大きい.歩行者交通量が多くなるほど,
安全走行時の走行所要時間の増加傾向が大きい.そして 対向車交通量の影響については,歩行者追い越し時の車 両の挙動としているため,本研究のシミュレーションで は安全,あるいは危険走行による違い及びその程度が少 なくなっている.
⑦また,追い越し視距については,減速する安全走行時 の追い越し視距と比較して,減速しない危険走行時の追 い越し視距が
V0=30km/h
の時,約1.2
倍,V0=40km/h
の時,約1.4
倍程度長くなる.以上のことより,快適な歩行者空間を実現させ,かつ 車両運転者の負荷量を減じるために,歩・車混合交通に おける狭幅員道路では,安全運転で定義したような歩行 者を安全に追い抜くことのできる規制速度とすることが 望ましい.道路交通法第二条で,車両等が直ちに停止す ることが出来るような速度で進行することを徐行と定義 し,その速度は
10km/h
程度といわれている.また,ボ ンエルフでの物理的規制速度15km/h
は,歩行者や道路 で遊ぶ子供達の安全を守ることが出来る速度とされてい る.本研究では,車両が歩行者を並行して追い越す状況 を想定しており,自転車並みの速度20km/h
を歩行者追 い越し時の安全速度とした.安全で快適な歩行者空間の創意工夫が進んだ欧米諸国 では,速度帯の異なる自家用車や歩行者の混在する住居 系地域においてコミュニティ道路などのハード的手法が 速度規制策として実施されている.コミュニティ道路な どが一部の地域に限定されている我が国においては,
歩・車混合交通の安全で快適な歩行者空間を実現させる ために,規制速度と歩行者速度に大きな違いがある場合 でも,車両運転者は安全走行時の負荷を十分に認識しな がら歩行者と運転者の両者の視点で安全な運転操作を心 掛けなければならない.
謝 辞
本研究のために,夏期休暇,冬期休暇,普段の週末を も返上し,また,夜遅くまでお付き合いただいた日もあ り,これまで指導して下さった竹内光生先生には大変感 謝しております.本当にありがとうございました.
参考文献
1)
警察庁交通局/建設省都市局・道路局,コミュニティ・ゾーン形成マニュアル,1996
2)
福西 博,日野泰雄,山中英生,第22
回日本道路会議論文集,狭幅員道路における交通対策の一手法 一般論文(A),1997
3)
日野泰雄,第31
回 日本都市計画学会学術論文集,住区内狭幅員道路における錯綜危険度と交通安全意 識に関する研究,1996
4)
眞殿亜紀,日野泰雄,福西 博,上林恭子,平成9
年度土木学会関西支部年次学術講演,狭幅員道路に おける交通安全対策の考え方とその評価に関する一 考察5)
日本道路協会,道路構造令の解説と運用,20046)
建設システム工学科31期生 堅田慎司,卒業論文,歩行者追い抜き時の走行シミュレーション,2001
7)
株式会社コロナ社 秋山孝正,上田孝行:すぐわかる計画数学,1998