博士(工学)学位論文
多目的ネットワークシステムの評価指標算出方法 に関する研究
首都大学東京大学院 システムデザイン研究科 経営システムデザイン学域
髙橋 奈津美
i
目次
第
1
章 序論1
1.1 緒言 1
1.2 ネットワークシステムの表現方法 3
1.3 単目的ネットワーク最適化問題 7
1.3.1 信頼度問題の概要 8
1.3.2 経路探索問題 13
1.3.3 最大流量問題 15
1.4 多目的最適化問題への展開 17
1.4.1 パレート最適解の定義 18
1.4.2 全点間信頼度を考慮した最適化問題 19
1.4.3 最適経路探索問題 21
1.5 本論文の目的・構成 24
第
2
章 全点間信頼度と構築コストを考慮した2
目的ネットワーク設計問題
26
2.1 緒言 26
2.2 問題定義 26
2.2.1 記号定義と仮定 26
2.2.2 全点間信頼度を考慮した多目的ネットワーク設計問題 27
2.2.3 全点間信頼度と構築コストを考慮したパレート最適解の定義 28
2.3 提案アルゴリズムの概要 28
2.4 ネットワークの性質 30
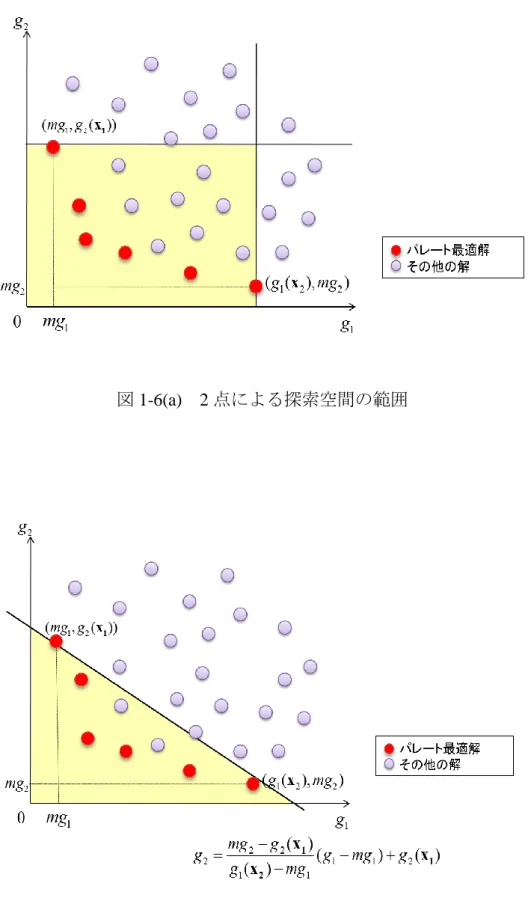
2.4.1 パレートフロントを構成する解の傾向 30
2.4.2 計算対象部分ネットワークの選択基準 32
2.4.3 追加するエッジの選択指標 36
2.5 提案アルゴリズム 37
2.5.1 解のランクを用いるアルゴリズム 38
2.5.2 パレート最適解の傾きを用いるアルゴリズム 40
2.6 数値実験による評価 41
ii
2.6.1
発見率と計算時間からの評価41
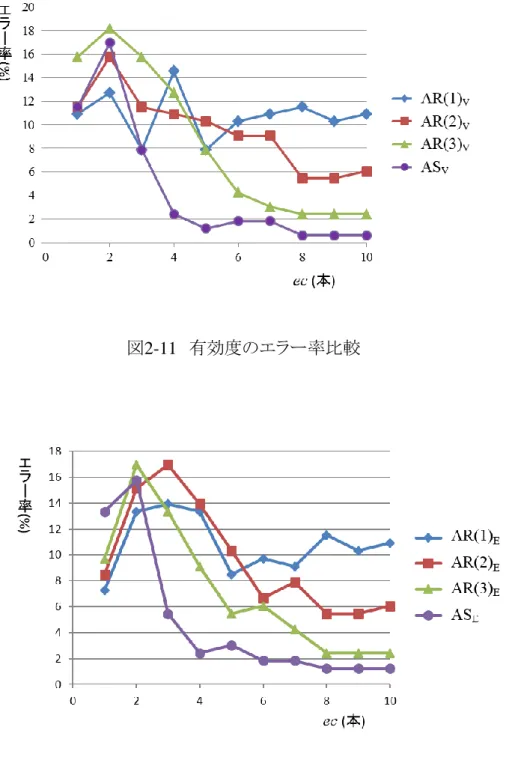
2.6.2
エラー率からの評価43
2.7
結言45
第
3
章 全点間信頼度制約付き構築コスト最小化問題47
3.1 緒言 47
3.2 問題定義 48
3.3 ネットワーク構造の分類 49
3.3.1 分類の基準 49
3.3.2 ネットワークの分類 52
3.3.3 ファクタリング法 56
3.3.4 ファクタリング法を用いた信頼度比較 58
3.3.5 全点間信頼度最大の構成 62
3.4 数値実験による評価 69
3.5 結言 73
第
4
章 多目的を有する最適経路探索問題74
4.1 緒言 74
4.2 問題定義 75
4.2.1 多目的最適経路問題 75
4.2.2 多目的最適経路問題におけるパレート最適解の定義 76
4.3 拡張ダイクストラ法 77
4.4 提案アルゴリズム 84
4.4.1 探索空間削減の基準経路 84
4.4.2 探索空間の削減方法 84
4.4.3 合成単目的最適経路による探索空間削減 87
4.4.4 目的関数値に基づく探索空間削減 89
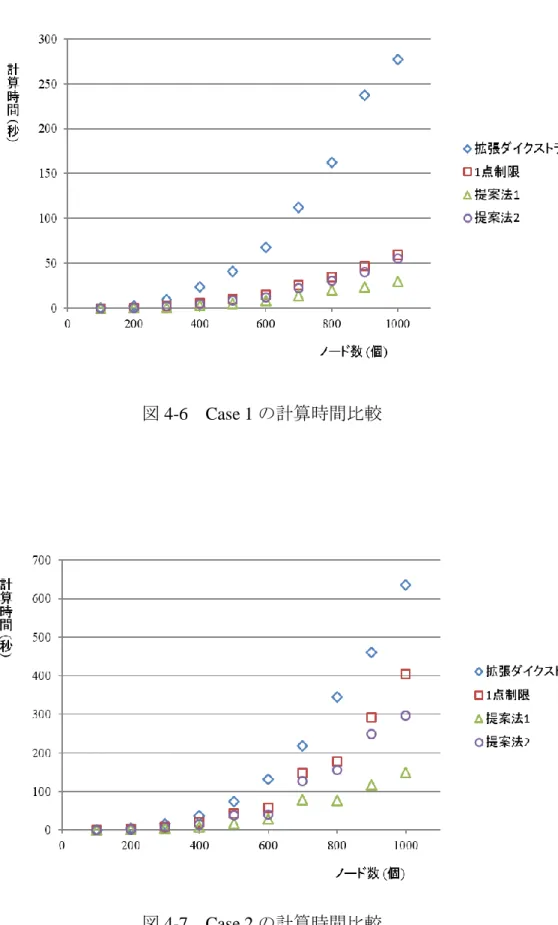
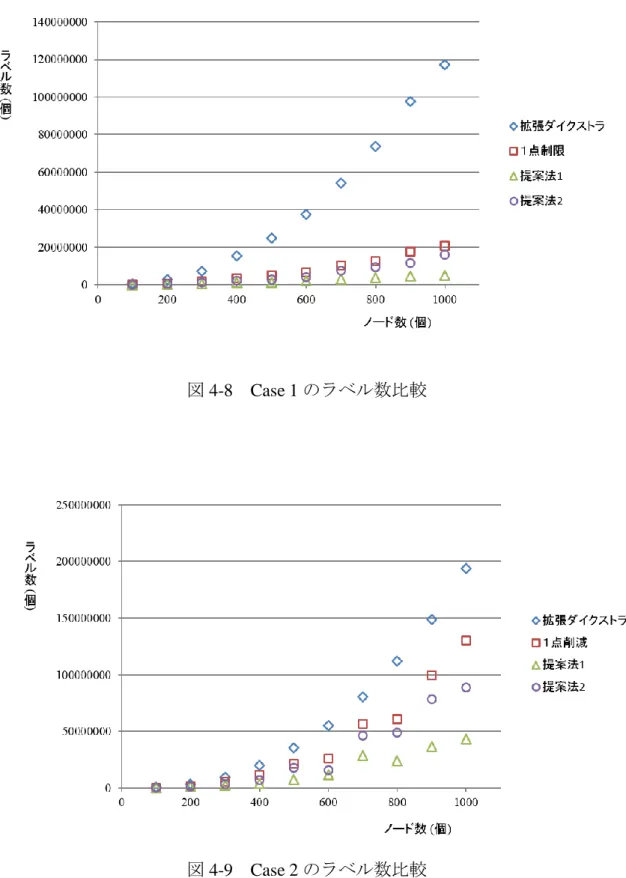
4.5 数値実験による評価 91
4.6 結言 96
iii
第
5
章 結論98
参考文献
101
謝辞
109
1
第
1
章 序 論1.1
緒 言近年,我々の生活基盤や社会基盤を支える多くのシステムが複雑化・大規模化 し,システムの信頼性,可用性,安全性を確保することが急務となっている.そ れらシステムの多くはネットワーク構造を有する.例として,物理的な構造がネ ットワークとなっている鉄道や道路[69,80]などの,主に大都市圏のように複数の 路線が複数の都市や駅を連結するように構築されているネットワークがある.
また,電話などの通信網や電力網,水道網のように,交換局や変電所のような 集約・拡散を行う設備が張り巡らされ,様々な社会基盤を下支えしているものも,
同様にネットワーク構造を持つ.更には,無線
LAN
やワイヤレスセンサーネッ トワーク[8,31]などのように,従来の物理的な結線ではなく,無線通信による概 念的なネットワーク構造を構築したシステムも同様にネットワーク構造を持つ.一方,システムの評価指標は,一般的に,対象となるシステム,および,評価 者側の都合やそれらを取り巻く環境により異なる.道路交通網や鉄道網では目的 地への距離や時間,電力網や水道網,都市ガス網などでは輸送量,そして通信網 などでは接続回線の通信容量などが評価指標として考えられる.さらに社会基盤 を構築するシステムにおいて,周くすべての設備が安定して故障せずに接続され る信頼性の確保も重要な評価指標である.信頼性は「アイテム(部品・デバイス など)が与えられた条件の下で,与えられた期間,要求機能を遂行できる能力
(JIS
Z8115
-2000)」と定義されるが,社会基盤を構築するシステムが要求機能を遂行で
きなくなった場合に社会に与える影響の大きさは,
2011
年3
月の東日本大震災後 の電力・通信・水道・ガスなどのインフラサービスの混乱が記憶に新しい.以上のようにネットワーク構造を持つシステムの問題は,ネットワーク理論と して古くから研究が進められている[2,12,16,19,22-24,42,59].同時に,有限のシス テムないしは離散的なシステム内における対象の数え上げを考えるネットワー ク理論は,組み合わせ論の
1
つの部門として考えられる.そして組み合わせ論の 問題において,対象の組み合わせにより複数の実現可能な選択肢(実現可能な「解」)が数え上げることができるならば,その選択肢の中で最善の解を求める 最適化の問題が存在する[20].これは経済的な捉え方をすれば「最も安価な解」
を求めることが最適化となるが,前述の信頼性を考慮する場合には「最も高い信 頼性を得る解」を求めることも最適化となる.また,その他の展開として,冗長
2
系モデルの
1
つである多状態 k-out-of-n:G/F/Load-Sharing システムをフローネッ トワークに当てはめて評価する方法(Jenab他[28])や,ネットワーク問題を社会 科学分野へ発展させ,部分ネットワーク(部分グラフ)をコミュニティとして複 数のコミュニティの連結を分析する手法(吉田[87]
,Newman
他[45]
)などが多数 提案されている.また,システムの恩恵を受ける我々消費者の価値観も多様化している.例えば 高信頼性・高可用性,安全性などの基本的な要求を満たした上で,多くの場合で 利便性や低価格化を考慮に加えることが必要となっている.一般的にこれらの評 価指標を利用する意思決定者にとって,一つの解(案)を提示するよりは,代替 案として複数解を提示することが望ましい場合がある.しかも,それらは単一の 評価指標による案ではなく,同時に複数の評価指標を考慮した案を提示すること が重要となる.
ネットワークにおける最適化は,実規模問題をモデル化することにより,通信 ネットワーク,生産・流通システムなど多くの異なる分野のシステムで広く考え られている.例えば
GPS
による自動車のカーナビゲーションによる道路情報を 加味した最適経路選択,インターネットに代表される大規模な通信ネットワーク システムにおける最適な通信経路選択,いわゆるOSPF
ルーティング問題,迅速 な情報交換能力の付加された生産情報システムにおける生産物流スケジューリ ング,ロジスティクス・システムにおける顧客とサプライヤーのグローバル化に 伴う多段階SCM
ネットワークなどの最適化などである.これらの問題に着目す ると,例えば交通網における経路選択では,出発地から到着地までの移動時間の 最小化を目的とした経路選択と,移動のために発生するコストの最小を目的とし た経路選択,さらに,CO2排出量などのように社会要求のある指標を最小とする 経路選択など,幾つかの評価指標による案の提示が考えられる.このとき,それ ぞれの目的を満足する選択案は異なる場合がある.しかし意思決定者側からは,移動時間と移動コストと
CO
2排出量の3
つの評価指標を同時に考慮し,最小化し た案が最適な提案として望まれる場合が考えられる.また,通信網における通信 経路設計の比較を考えた場合,複数の通信対象どうしの相互通信が与えられた条 件のもとで与えられた期間保障される信頼性設計を満足した上で,情報通信コス トの最小化を目的とした場合と,遅延時間の最小化を目的とした場合,経路の保 全に必要なコストの最小化を目的とした場合など,幾つかの異なる評価指標を加 味した経路設計の代替案の提示が考えられる.このとき意思決定者側からは,シ ステム故障を最小限に保つことに加え,保全コストと遅延時間の2
つの評価指標 を同時に考慮し最小化する設計代替案や,決められた情報通信コストや保全コス トを満足した上で,システム故障の確率が最小となる設計代替案を求められる場 合などが考えられる.以上のような問題は,複数の目的関数を持つ多目的最適化3
問題[71]として定式化される.
この背景の下,本論文では,ノードとエッジから構成されるグラフとして表現 されるシステムをネットワークシステムと呼び,多様な価値観に対応した(複数 の)評価指標を有するネットワークシステム(以下「多目的ネットワークシステ ム」と呼ぶ)に注目した.そして,上述の問題解決に有効な手法を提案するため に,多目的ネットワークシステムの評価指標について,特に,本論文では,シス テム故障の社会に与える影響の大きさを考えてシステム信頼度,また,意思決定 者にとって重要な指標としてコストを考えた.この性質の異なる評価指標の算出 方法を提案することで,上述の問題解決に有効な手法の
1
つとして示すことを目 的とする.1.2
ネットワークシステムの表現方法本論文で扱うネットワークシステムの表現方法について述べる.はじめに,ネ ットワークはグラフによって下記のように表される.
1)
グラフによる表現グラフ
G (graph)
とは,図1-1
のようにノード(
頂点:vertex)
と呼ばれる要素の集合と,エッジ(辺:edge)またはアーク(弧:arc)と呼ばれる要素の集合から成る[16].一 般的に,ノード間を連結する要素は,無向の場合はエッジ,有向の場合はアーク と呼ばれることがあるが,本論文においてはどちらの場合もエッジと呼ぶことと する.また,本論文ではこのノードの集合とエッジの集合から成るグラフを「ネ ットワーク」と呼ぶ.
図
1-1
グラフで表されるネットワークの例4
ネットワーク中の
2
つのノードu
,v
を考える.u
とv
がエッジe
で結ばれてい るならば,uとv
は隣接しているという.さらに,uとv
はe
と接続しているとい い,e
はu
とv
を接続しているという.この接続の概念を用いて,次数,次数列 を定義する.G
をループのないネットワークとする.G
のノードv
の次数[33]と は,v
に接続するエッジの本数のことである.G
の次数列[33]とは,これらのノ ード次数を非減少の順序で列挙することによって得られる数列のことである.G
のどのノードもすべて同じ次数(r
とする)を持つとき,G
は次数r
の正則であると いう.また,次数0
のノードは孤立ノードと呼ばれる.また,特徴的なグラフについて以下で述べる.
(1)
完全グラフ完全グラフとは,異なるノードの対の全てが
1
つの辺によって結ばれている グラフのことである.n
個のノードを持つ完全グラフは,次数n 1
のノードか らなる正則グラフであり,2 ) 1 ( n
n
本のエッジを持つ.(2)
部分グラフグラフ
G
の部分グラフとは,そのすべてのノードがG
のノード集合に属し,そのすべてのエッジが
G
のエッジ集合に属するグラフである[20,33].本論文で は部分グラフを「部分ネットワーク」と呼ぶ.(3) 2
部グラフ2
部グラフとは,そのノード集合が集合A
とB
に分けることができ,グラフ のどのエッジも全て,Aに属するノードとB
に属するノードを結ぶようになっ ているグラフのことである.図1-2
に例を示した.特に,図1-2
の(b)のようにA
に属するノード全てがB
に属するノード全てと1
本のみのエッジで連結されて いる2
部グラフは,完全2
部グラフと呼ばれる.図
1-2 2
部グラフの種類5
2)
同型の定義ネットワークをグラフで表現すると,2つのネットワークの図が異なっている ように見えるが,同じネットワークを表現している場合や,異なるネットワーク であるが,2つのネットワークの図は同じように見える場合があり得る.この相 似性を言い表す表現として,これら
2
つのネットワークは同型であるという.こ の意味は,2つのネットワークは本質的には同一の構造を持っているということ である.つまり,一方のネットワークにおいてノードのラベルを付け変えると,他方のネットワークを得ることが出来る.
2
つのネットワークG, H
を考える.G, H
が同型であるというのは,ノードの ラベルを付け変えることでG
からH
が得られる場合,すなわちG
のノードとH
のノードとの間に,G
の任意のノードの対を結ぶエッジ本数が,H
のノードのそ れに対応する対を結ぶエッジ本数に等しいような1
対1
対応が存在する場合[20,33]である.この 1
対1
対応を同型と呼ぶ.3)
サイクルの定義ネットワーク
G
における長さk
の歩道とは,uv , vw , , yz
という形式の,G
のk
本のエッジの連続のことである.この歩道をuvwx yz
と表し,それをu
とz
の間 の歩道と呼ぶ.歩道の全てのエッジが異なっている場合,その歩道は小道と呼ば れる.さらに小道の中で,すべてのノードが異なっている場合,その小道は道と 呼ばれる.ネットワーク
G
は,任意のノード対の間にG
における道が存在するとき連結で あるといい,そうでない場合は非連結であるという.非連結のネットワークはす べて,成分と呼ばれるいくつかの連結部分ネットワークに分割することができる.次に,始点のノードと終点のノードが同じである歩道・小道に関して以下を定 義する.ネットワーク
G
における閉歩道とは,uv , vw , , yz , zu
という形式の,G
の一連のエッジのことである.これらのエッジの全てが異なるとき,その歩道は 閉小道と呼ばれる.さらに,すべてのノードが異なっているとき,その小道はサ イクルと呼ばれる[20,33].サイクルグラフとは図
1-3
のような単一のサイクルから成るグラフである.n
個のノードを持つサイクルグラフは,次数2
のノードからなる正則グラフで,n
本 のエッジを持つ.6
図
1-3
サイクルグラフの例4)
連結グラフ例えば,通信ネットワークや交通ネットワークにおいては,ある区間の接続が 不通となった場合においても,ネットワーク全体は機能していることが求められ る.このような問題は任意の
k
個のノード (k 2 )
の接続するエッジとノード の連結によって説明される.本項ではネットワークの連結に関する定義について 述べる.(1)
辺連結度連結グラフ
G
の辺連結度 (G )
とは,そのエッジを除くとグラフが非連結にな るエッジの最小数[20,33]のことである. ( G ) k
のときG
はk -辺連結であると
いう.また,ある単一のエッジを除くとグラフが非連結となるとき,そのエッ ジをブリッジと呼ぶ.連結グラフG
の辺連結度 (G )
は,G
の最小カットセット の大きさに等しくなる.カットセットとは,以下の2
つの性質を持つエッジ集 合S
のことである.1
つは,S
に属するすべてのエッジを除くとG
は非連結に なることで,もう1
つはS
に属するいくつかのエッジを除いてもG
は非連結に ならないという性質である.(2)
点連結度連結度は,取り除くノード数で考えることもできる.ノードを除くときには,
そのノードに接続するエッジも取り除くとする.連結グラフ
G
の点連結度)
(G
とは,それを除けばG
が非連結になるノードの最小個数[20,33]のことであ る. ( G ) k
のとき,グラフはk -
点連結であるという.辺連結度,k -
辺連結と 混同の恐れがないときは,点連結度は連結度,k -
点連結にはk -
連結を用いる.特に,完全グラフの連結度は
n 1
で,n 1 k
のときk -連結であるという.連
7
結グラフ
G
の連結度 (G )
は,G
のノードに関する最小カットセットの大きさ に等しくなる.ノードに関するカットセットとは,以下の2
つの性質を持つノ ード集合S
のことである.1 つは,S
に属するすべてのノードを除くとG
は非 連結になることで,もう1
つはS
に属するいくつかのノードを除いてもG
は非 連結にならないという性質である.(3)
グラフについてのメンガーの定理(エッジ形式)連結グラフ
G
とG
のノードs, t
を考える.s, t
間の道はst
道と呼ばれる.2 本以上のst
道がエッジを1
本も共有していないとき,辺素であるといい,st
道同士がs, t
以外のノードを1
つも共有していないとき,点素であるという.次にグラフの分離の概念を述べる.ノード
s, t
を持つ連結グラフG
において,1
本もしくはそれ以上のエッジがs
をt
から分離するというのは,これらのエッ ジを除くことですべてのst
道が分離され道がなくなるときである.ノードに ついても同様に定義される.これより
st
道は,st
道を分離するエッジ集合から少なくとも1
本のエッ ジを含むことになる.よって,辺素であるst
道の最大数は,st
道を分離す るエッジ集合のエッジ数以下であることから,辺素であるst
道の最大数は
st
道を分離する最小カットセットの大きさに等しいことがメンガーの定理[42]として導出されている.
(4)
メンガーの定理の系(連結度について)連結グラフ
G
がk -辺連結であるのは, G
の任意の2
つのノードが少なくともk
本の辺素である道によって連結されているときだけである.このエッジ形式のメンガーの定理を一般化したものが,最大フロー・最小カ ット定理であり,後述する最大流量問題の定理の
1
つである.1.3
単目的ネットワーク最適化問題前述のようにノードとエッジから構成されるグラフとして表現できるネット ワークシステムにおける最適化問題は,ネットワーク理論として古くから研究が 進められている.本節では複数の実現可能な「解」が数え上げられる目的関数を 考慮し,その選択肢の中で最善の解を求める単目的最適化問題を紹介する.
8
1.3.1
信頼度問題の概要ネットワークシステムの故障を考慮する問題として,ネットワークの信頼度問 題がある.これはノードやエッジ付与された稼働確率からネットワーク全体の信 頼度を評価する問題である.Aggarwal他[2]は通信ネットワークにおいてノード
(に当たる機器)とエッジ(に当たる結線)について,稼働状態と故障状態の2 状態を考慮した2状態ネットワークのモデルを考え,その信頼度評価方法を提案 した.Boesch[14]は,すべてのエッジ信頼度が同一の場合の信頼度算出方法をま とめた.信頼度は連結確率を算出する対象ノード数によって,2点間信頼度,k点 間信頼度,全点間信頼度のように複数に分類され,様々な研究が行われてきた
[13,47,80].また,ネットワークの信頼度問題ではその問題の困難さから様々な派
生問題が研究されてきた.エッジの最適な配置問題の解法として,Jan他[27]は分
枝限定法を応用した手法を示し,さらに遺伝的アルゴリズムによる準最適配置,及び,モンテカルロ法シミュレーションの応用による準最適配置導出方法が,
Dengiz他[17,18]やRamirez-Marqueza他[46]により提案されている.Li他[34]は,多
重層構造の複雑なネットワークにおいて上限値と下限値の導出方法を示した.ま た,エッジの状態数について,状態数が複数存在する多状態ネットワークに対す る研究も展開されている.Zuo他[67]はこの多状態ネットワークの信頼度問題に対
し,極小パス(MP)を求めることで評価する方法を提案している.厳密な信頼度の算出方法について,包除原理を用いた方法,
SDP(Sum of Disjoint Products)法,ファクタリング法が知られている.以下に,それぞれの信頼度算出
方法を簡単に述べる.1)
包除原理による信頼度算出ネットワークの信頼度の算出方法の
1
つとして,確率の包除原理を利用する方 法 が あ る . ネ ッ ト ワ ー ク に 対 し て , 対 象 ノ ー ド を 連 結 す る 極 小 パ スMP
i( i 1 , 2 , , h )が列挙されているとする. P
iをMP
iの全てのエッジが稼働して いる事象とする.信頼度はP
iのうち少なくとも1
つのP
iが生起する確率に相当す る.h 2
の場合,信頼度は下記の式で求めることが出来る.] Pr[
] Pr[
] Pr[
]
Pr[ P
1 P
2 P
1 P
2 P
1 P
2以上のことを拡張すると,
i 1 , 2 , , h
に対してネットワークG
の信頼度をR (G )
としたとき,R (G )
は,9
] Pr[
) 1 ( ]
Pr[
] Pr[
] Pr[
)
(
1 1 21 2
1 h
h j
i
j i h
i i
h
P P P P P P
P P
P G
R
によって計算される.
この展開式の項数は,
2
h 1
であり,極小パス数が増えるにつれ増大する.し かし,Satyanarayana 他[48]は,この展開式には互いに打ち消しあう項が多く存在 することに着目し,効率的な信頼度の算出法を提案した.2) SDP
法による信頼度算出SDP
法は,得られた極小パスが生起する事象を互いに背反な事象に展開して信 頼度を求める方法[1,11]である.i 1 , 2 , , h
に対して,極小パスMP
iが列挙されて いるとする.P
iをMP
iの全てのエッジが稼働している事象,P
i をP
iの余事象と する.さらにi 1 , 2 , , h
に対して,事象O
i P
1 P
2 P
i1 P
iを考えると,それそれの
O
iは互いに背反である.このとき,ネットワークG
の信頼度R (G )
は,] Pr[
] Pr[
] Pr[
] Pr[
)
(
1 1 2 1 2 11
h h h
i
i
P P P P P P P
O G
R
で計算することができる.
3)
ファクタリング法包除原理を用いた方法とSDP法では,事前に極小パスや極小カットを求めてお く必要があり,極小パスや極小カットの列挙法について多くの研究がされている
[49,50].しかしファクタリング法は,極小パスや極小カットを算出することなく,
ネットワークの信頼度を計算することが出来る.ファクタリング法は特定エッジ の状態に注目して場合分けを行う方法で,
Moskowitz[43]により信頼性問題へその
概念が適用された.詳細な信頼度算出方法については,次に述べる.4)
本論文で利用するファクタリング法による信頼度算出法本論文では,ネットワークシステムの故障を考慮する評価指標として特に全点 間信頼度に注目する.以下に第
2
章で使用するネットワーク表現を用いて,全点 間信頼度の算出アルゴリズムを述べる.ノード数
n
の完全グラフを考えると,その総エッジ本数はn(n - 1)
2
である10
(
2 ) 1 (
n n
m
とする).i 1 , 2 , , m
に対し,エッジe
iの有無を表す変数x
iを考える.x
iを,e
iがネットワークの構成要素である場合は1,それ以外の場合は0とする二 値変数とし,x ( x
1, x
2, , x
m)
と考えると,ベクトルx
は完全グラフの部分グラフ を表現できる.よってベクトルx
を部分ネットワークと呼ぶこととする.エッジ には稼働と故障の2つの状態がありi 1 , 2 , , m
に対して,エッジe
iが稼働状態で ある確率をエッジe
iの信頼度p
iという.部分ネットワークの全ノードが稼働状態 のエッジで連結されている確率を全点間信頼度と呼ぶ.また,エッジの信頼度は,一定レベル以上の通信,交通等が実現される確率と解釈することもできる.この とき全点間信頼度は,ネットワークのノード全ての間で一定レベル以上の通信,
交通等が実現される確率に相当する.
小出[72]は部分ネットワーク
x
の全点間信頼度R (x )
の算出について,ファクタ リング法を全部分ネットワークに対して適用する再帰的アルゴリズムを提案し た.以下にファクタリング法の計算法を示す.エッジ
e
iの故障を仮定した場合はエッジの削除,稼働を仮定した場合は連結す るノードを1
つにまとめる縮約という操作により場合分けを行い,考慮するネッ トワークのエッジ数またはノード数を減らす.p
iをエッジe
iの信頼度,エッジe
i の削除,縮約をした部分ネットワークをそれぞれx e
i, x \ e
iと表すと,全点間 信頼度R (x )
は(1.1)式で求められる.補助定理
1-1 部分ネットワーク x
,エッジe
i E
に対し,次式が成立する.)
\ ( )
( ) 1 ( )
( p
iR e
ip
iR e
iR x x x
(1.1)
部分ネットワーク
x
の全点間信頼度R (x )
は,削除と縮約をエッジが1
本になる まで行うことで求められる.例として図
1-4
に示すノード数3
のネットワークを考える.全点間信頼度は,図
1-4
のようにエッジの本数ごとに部分ネットワークを構成して算出する.図1-4(a)は,エッジ e
2とe
3を持つ部分ネットワークx
1に対するエッジの削除と縮約の例を示している.
x
1の全点間信頼度R ( x
1)
は,(1.1)
式より,3 2 2
1
) ( 1 ) 0
( p p p
R x
と求められる.
x
1と同様の計算を,エッジ本数がx
1と同じ部分ネットワーク全て に対して行う.図1-4の例では,(b)と(c)に示した2つの部分ネットワーク x
2とx
3へ の削除・縮約が相当する.次に,図1-4(d)のようなエッジを1本追加した部分ネッ11
トワークに対しても同様の手順を繰り返す.実際に部分ネットワーク
x
の全点間 信頼度R (x )
を求める際は,補助定理1-1をR ( x e
i)
,R x ( \ e
i)
が容易に求められる ネットワークの構成になるまで適用し,全点間信頼度の計算を行う.小出[72]は,ファクタリング法の効率化を図るために,ファクタリング法の再帰過程において 部分ネットワークの信頼度を参照するアルゴリズム(factmem法)を提案した.
図
1-4 全点間信頼度の計算手順
図1-4の(d)のネットワーク
x
4において,エッジe
1を削除した部分ネットワーク は,先に全点間信頼度を計算した図1-4の(a)の部分ネットワークx
1と同型である.そこで,ネットワーク
x
4の全点間信頼度R ( x
4)
は次式で求めることができる.} 1 )
1 {(
) ( ) 1 ( )
(
4 p
1 R
1 p
1 p
2 p
3 p
2
R x x
このとき,部分ネットワーク
x
1の全点間信頼度R ( x
1)
を計算した際にその値を 記憶し,R ( x
4)
の計算時に記憶したR ( x
1)
の参照を行う.以下に信頼度の参照を12
付加したファクタリング法による計算過程を示す.
X
kをエッジ数k
の部分ネッ トワーク集合,E [x ]
は部分ネットワークx
のエッジ集合とする.また,Sを信頼 度を記憶したネットワーク集合とする.【信頼度の参照を付加したファクタリング法の計算過程】
STEP1: x X
kを選択する.STEP2: e
i E [x ]
を選ぶ.STEP3:
STEP3-1: e
iを縮約しx \ e
iを構成する.STEP3-2:エッジ数が 2
本以上ならSTEP2
に戻る.STEP3-3:エッジ数が 1
本以下ならR x ( \ e
i)
を計算する.STEP4:
STEP4-1:縮約した順番の逆順に e
iを選択してx e
iを構成する.STEP4-2: S
からx e
iと同型のネットワークを探す.S
にx e
iが記憶されていればR ( x e
i)
を参照する.x e
iが記憶され ていなければR x ( e
i) 0
とする.STEP5: R ( x ) ( 1 p
i) R ( x e
i) p
iR ( x \ e
i)
を計算する.STEP6:記憶対象であるネットワークならば, S S {( G , R ( x ))}
STEP7:STEP4-1
ですべてのe
iが選択されていれば計算終了,そうでなければSTEP4-1
に戻るSTEP8:STEP1
ですべてのx
が選択されていればk k 1
としてSTEP1
に戻る.そうでなければ,STEP1に戻る.
Akiba
他[5]は,factmem
法において計算過程でノード数が1
になった部分ネットワークなど,信頼度が自明な部分ネットワークに対して計算を排除し,効率化を 図った改良
factmem
法を提案した.彼らは以下の補助定理を示した.補助定理1-2
エッジ数が
n-1
本未満の部分ネットワークは構成・計算する必要がない.補助定理1-3
縮約の過程でノード数が1になった時点で全点間信頼度は1であり,それ以上の 縮約は必要ない.
13
本論文の第
2
章と第3
章で考察する問題において,全点間信頼度の計算は改良factmem
法を用いる.1.3.2
経路探索問題システムの故障を考慮しない場合の問題の
1
つとして,経路探索問題が挙げら れる.与えられた距離や時間,あるいはコストなど重み付きネットワークの2
つ のノード間を結ぶエッジ集合を経路と呼ぶこととする.このとき経路の中で,移 動コストもしくは移動時間などの重みが最小となる経路を探索する問題が,最短 経路問題[33]である.地点やそれを繋ぐ道路によるネットワークは,地点をノード集合
V
,間を繋ぐ 道路をエッジ集合E
とすると,グラフG ( V , E )
上で考えることができる.エッ ジに距離やコストの重み,始点ノードs
と終点ノードt
が与えられたとき,s
とt
を 繋ぐ経路の中で,エッジの重みの総和が最小である経路を探索する問題が最短経 路問題である.エッジの重みは,定数の場合だけでなく確率的に変化する場合の 研究も行われている.Aida
他[3,4]は,経路の重みが許容範囲を上回る確率が最小 化である経路の探索を考え,経路の重みの平均値と標準偏差(
分散)
を利用して経 路を評価している.最適経路問題を解くアルゴリズムについていくつかあるが,これらは,いずれ も以下の原理に基づいている.
G
を負の重みの閉路を持たないグラフとする.後 述する図1-5
に示したネットワークのノード1
とノード2
のように,ノードの双 方向連結を考えた場合,その区間のエッジの重みが等しくなければ有向グラフで あり,等しければ無向グラフとなる.2
点のノードs , w V
に対してk
本のエッジ からなるs, w
間の経路のうちで最短のものをP
とし,経路P
でノードw
に接続す るエッジe
はノードv
とw
を接続しているとする.このとき,経路P
からエッジe
を除いた経路は,s, v
間の経路のうちで最短であるという原理で,Bellman
の最適 性原理と呼ばれる.以下に最短経路を解くアルゴリズムについて紹介する.ここでノード
v
までの 距離をl
v,エッジe
の距離をc
eとする.14
1) Dijkstra
法最短経路問題の多くは,エッジの重みが非負である.その場合に有効なアルゴ
リズムが
Dijkstra
法[19]である.図1-5
にDijkstra
法による手順例を示す.始点ノード
s
からノードv
に到達するまでに辿った総距離をl
vとする.ノード集合V
の 全ノードを集合Q
に追加する.集合Q
おいて,l
vが最小であるノードv
に注目す る.v
にノードu
がエッジe
により接続しているとき,l
u l
v c
eであればe v
u
l c
l
として更新し,Q Q \ { v }
とする.図1-5
はl
2がノード1
を経由する 経路によって更新される様子を表している.これを,ノードv
がノードt
に到達す るまで繰り返し,最終的にt
までの最短経路が探索される.また
Dijkstra
法の改良として,安井他[85]のように大規模ネットワークの最短経路問題を解くために,計算機のメモリ階層構造に注目し,Dijkstra 法の特徴で ある値記憶領域の参照が連続的に行われるようキューを待機させる高速化の提 案などのように,様々な提案がこれまでにされてきた.
図
1-5 Dijkstra
法の手順例15
2) Bellman-Ford
法エッジの距離の合計が負となるような閉路がある場合にも適用することがで きる.ノード
s
からk
本のエッジを通過してノードv
に到達する経路の距離を) (k
l
v と す る .v
に ノ ー ドu
が エ ッ ジe
に よ り 接 続 し て い る と き ,e v
u
k l k c
l ( 1 ) ( )
であればl
u( k 1 ) l
v( k ) c
eとして更新する.この過程で負閉 路が存在すれば,l
v( n ) l
v( n 1 )
となるノードv
が存在する.よって,Bellman-Ford
法[12,70]は負閉路があればその存在を発見し,なければノードs
から他の全ての ノードへの最短経路を探索する.1.3.3
最大流量問題経路探索問題の他に,システムの故障を評価指標として考慮しない場合の問題 として,最大流問題が挙げられる.ネットワークの評価指標に「流量」を考慮し た最適化問題は,最大流量問題[33,84]として定式化されている.ここでは,一般 的な最大流量問題について述べる.はじめに基本ネットワークについて下記を仮 定する.
i.
ネットワークは有向グラフG ( V , E )
で表され,始点ノードs
と終点ノードt
を1
つずつ持つ.ii.
ネットワークのエッジe
iにはそれぞれ容量c
iが割り当てられている.容量 は,そのエッジを通過することのできるフローの最大量を表す.始点ノード
s
と終点ノードt
を持つネットワークG
の流量とは,G
の各エッジE
e
i
に,e
iを流れるフローと呼ばれる非負の数a
iを割りあてたもののことをい う.このフローa
iには満たすべき制約がある.1 つは,各エッジのフローはエッ ジの容量を超えることはないという条件から,すべてのe
iに対してa
i c
iの制約 が生じる.もう1
つは,ノードs , t
以外の全てのノードv V \ { s , t }
に対して,v
へ のフローの総和がv
からのフローの総和に等しいという流量保存の法則である.ノード
s
を端点とするフローは流出のみ,ノードt
を端点とするフローは流入のみ とすると,流量保存の法則により,始点ノードs
からの総フロー量と,終点ノー ドt
への総フロー量は等しくなる.この総フロー量がネットワーク全体における 流量を表す.このとき,ノードs
からt
への流量が最大となるとき,その流れを最 大流量(最大フロー)と呼ぶ.16
最大流量問題は,容量に対する流量の制約や,各ノード
v V \ { s , t }
において,v
から出る流量とv
へ入る流量は等しくなる流量保存制約などの満たすべき複数 の制約条件を持つ最適化問題である.これらの許容流量の範囲内で,始点ノードs
からの供給量ないし終点ノードt
への到達量 max
wtwt s
v
sv
a
a
を求める問題を最大流量問題という.ただし,
s
はノードs
が始点であるエッジ 集合の終点ノードの集合,t
はノードt
が終点であるエッジ集合の始点ノードの 集合を表す.最大流量問題の代表的な解法としては,Ford-Fulkerson法などがある.
1)
最小カットフローを持ったネットワークには,ボトルネックが存在する.例えば水道やガ スのネットワークでは,ある区間のパイプの直径が極めて小さい場合などである.
ネットワーク全体の総フロー量は,ボトルネックのフローよって制約を受ける.
この概念を表すため,カットの考えを用いる.ノード
s , t
のネットワークにお けるカットとは,ネットワークを分離するエッジの集合を指す.このエッジ集合 を除くと,ネットワークはノードs
が属す部分X
とノードt
が属する部分Y に分 離される.カットの容量とは,カット中のエッジ集合のうち,ノードs
を含むX
からノードt
を含むY
への方向を持つエッジの容量の総和である.最小カットと は,可能な最小容量のカットのことである.2)
最大流量問題の主な問題基本的な最大流量問題に対し,Fordと
Fulkerson
によりFord-Fulkerson
法[22]
が提案された.その手法は,残余ネットワークを用いて容量に余裕のあるエ ッジを辿り始点ノードs
から終点ノードt
への経路を繰り返し探索しフローを加 算することで最大フローを求めるアルゴリズムである.残余ネットワークとは,ネットワークの各エッジの容量の範囲内で,追加あるいは削減可能なフローを表 現したものである.また最大フローの総流量は,最小カットの容量に等しいとい う最大フロー・最小カット定理も
Ford
とFulkerson
により証明されている.他のネットワークの流量問題に関して,
Xue[63], Lin
他[35], Yeh[64,65]
はネッ17
トワークのエッジの状態に注目し,始点ノード
s
から終点ノードt
までの流量で,流量が
d
以上確保される極小パスセット(d-MPs)を効率よく求める方法を提案し た.反対に,流量上限がd
となる極小カットセット(d-MCs)を効率よく求める手 法もJane
他[29], Lin[36], Yeh[66]により提案されている.Lin[37,38]
は交通量や電 気回路の電流の評価に役立つ重み付きフローネットワークである確率フローネ ットワークに注目し,ノード故障を含めた信頼度計算方法を提案した.Lin[39-41]
はエッジとノードに複数の流量を定義した多状態フローネットワークに注目し,
ネットワーク全体の流量を求めるアルゴリズムを提案した.このモデルは複数の 荷室容量を考慮した都市間物流モデルなどに応用される.Assad[10] をはじめと した多くの研究者が,更に多品種流量問題へと拡張している.
1.4
多目的最適化問題への展開電力供給網や通信網など社会インフラにおいて,対象点が連結していることや 部品が故障しないことは必須であり信頼性が最重要項目となる.しかし,建設時 であれば建設コストも当然考慮する必要があり,運用時には送配電ロスや部品の バッテリー消費量などもネットワークを維持・効率的に運用するためには重要な 要素として考えられる.このように同時に複数の評価指標を考慮する場合,複数 の目的関数を持つ多目的最適化問題として定式化される.
この多目的最適化問題に対し,古くから複数の目的関数を組み合わせにより単 一目的の問題に変換するスカラー化手法がとられていた.しかしながら,スカラ ー化による単一解を探索しても意思決定者の選好に沿った解が得られるとは言 い難く,そもそもスカラー化のための重み付パラメータの選定も困難である場合 が多い.そのため,目的関数間のトレード・オフをバランスさせた解としてパレ ート最適解を求めることが重要である.
多目的ネットワークに対して,多目的
GA
等のメタヒューリスティック手法に よる研究が多くされてきた.多目的GA
では,Schaffer のベクトル評価型遺伝的 アルゴリズムに始まり,パレート最適解のフロンティアを明示的に取り扱うGoldberg
のランキング法[25]やFonseca
他[21]の多目的GA
などが代表的な研究として挙げられる.また,並列選択と同時に,得られているパレート最適個体を保 存する手法のなどの提案も行われている.
一般的に,多目的最適化問題は,次のように定式化される[71].
x
を,ネットワークG ( V , E )
のエッジの連結状態を示すベクトルとする.18 N
j 1 , 2 , ,
に対して,z
j g
j(x )
をj
番目の目的関数とし,f
k(x )
は制約条件の 関数とする.一般的に多目的最適化は以下の式で表される.)}
( ,
), ( ),
( {
min z
1 g
1x z
2 g
2x z
N g
Nx 0
) ( .
. t f
kx
s ( k 1 , 2 , M )
ここで,最大化問題は表記を変換することで表現可能である.これらの各目的 関数は一般的に互いに競合しているため,各目的関数を同時に最適化することが できない.つまり,ある目的関数を改善させることは,他の目的関数を悪化させ ることとなり,トレード・オフの関係が存在する.従って,多目的最適化問題に おける合理的な解の概念として,パレート最適解が定義されている.
1.4.1
パレート最適解の定義単一目的問題の場合には,すべての解候補の中で単純に最も優れた解を最適解 ということができる.しかし,多目的最適化問題では,各目的関数が互いに競合 するため,必ずしも最良な単一の完全最適解
[73]
があるとは限らない.これより,多目的最適化問題においては,各解を単純に比較することができないため,通常 は他のどの解にも劣っていない解の集合を得ることになる.このような解をパレ ート最適解[82]と呼ぶ.
パレート最適解は,多目的最適化問題における解の優越関係により定義される.
多目的最適化問題における解の優越関係の定義は次のようになる.
【優越関係の定義】
2
つのエッジ連携構造を持つ部分ネットワークx, x X
に対して,全ての目的関数
(
j 1 , 2 , , N )
に対し,g
j( x ) g
j( x )
のときx
はx
に優越すると いう.全ての目的関数
(
j 1 , 2 , , N )
に対し,g
j( x ) g
j( x )
のときx
はx
に強く優越す るという.もし