2019
年度卒業論文
光子‐光子衝突型加速器における 実光子弾性散乱の背景事象排除の研究
広島大学理学部物理科学科 高エネルギー物理学研究室
B161828
高原 一朗
指導教員 高橋 徹 准教授 主査 高橋 徹 准教授 副査 志垣 賢太 教授
2020
年
2月
28日
2
目次
1. 序論 ... 3
2. 光子‐光子衝突型加速器 ... 5
2.1. 加速器内のビーム ... 5
2.2. ルミノシティ ... 5
2.3. 加速器パラメータ ... 6
2.4. 逆コンプトン散乱による高エネルギー光子の⽣成 ... 6
2.5. 相互作用領域と測定器の配置... 8
3. 実光子弾性散乱の背景事象排除 ... 10
3.1. 信号事象と背景事象 ... 10
3.2. 加速器強度と事象の重なり ... 11
3.3. 磁場印加による荷電粒子の運動 ... 12
4. シミュレーションによる事象の検出... 13
4.1. 研究の流れ ... 13
4.2. 擬似事象の⽣成 ... 13
4.3. 測定器シミュレーション ... 14
5. データ解析 ... 16
5.1. 運動量ベクトルの定義 ... 16
5.2. ジェットクラスタリング ... 16
5.3. 機械学習を用いた事象選別 ... 19
5.4. 特徴量分布と事前選別 ... 19
5.5. BDTによる選別と評価 ... 23
6. 解析結果 ... 25
7. 結論 ... 31
参考文献 ... 32
3
1.
序論
古典電磁気学は荷電粒子間,荷電粒子と電磁波間の相互作用を記述し,電磁波間の相互作用は 記述しない.しかし,量子電磁力学(Quantum Electro Dynamics : QED)は光子間の相互作用を予 言する.光子間の相互作用の例として,真空中における光子‐光子弾性散乱がある.量子電磁力 学が記述する現象に関してこれまで高精度な実験的検証がなされてきたが,光子間の相互作用に 関してはその散乱断面積が非常に小さいため,実験的検証がほとんどなされておらず,精力的に 研究が行なわれている.欧州原子核研究機構(CERN)の大型ハドロン衝突型加速器(LHC)では鉛 原子核ビームの衝突過程において光子‐光子弾性散乱の観測が報告されている[1].この実験は,
重イオン同士の超周辺衝突の摂動計算過程で想定される仮想光子による弾性散乱を観測した.
X線自由電子レーザー施設SACLAでは,10 KeVオーダーのX線を用いた光子‐光子衝突実験が 行なわれたが,直接観測には至らなかった[2].このように,光子‐光子弾性散乱の検証に向けた 実験が世界中で行なわれてきたが,実光子による弾性散乱の直接観測は未だ報告されていない.
図1.1は真空中で衝突する2個の光子が量子電磁力学の高次効果により弾性散乱するダイアグ ラムを表している.
図 1.1 光子‐光子弾性散乱のダイアグラム
図1.2に光子-光子弾性散乱の散乱断面積を示す.図1.2中の黒色の矢印は過去の実験[2][3][4]で 得られたそれぞれの重心系エネルギーにおける散乱断面積の上限値を表している.散乱断面積は,
低エネルギー領域で光子‐光子衝突の重心系エネルギー𝐸𝐶.𝑀.の6乗に比例し,1~2 MeV領域で最
大値1 µb(10−34 m2)程度となる.したがって,光子‐光子衝突の重心系エネルギー1~2 MeV領域
を実現すれば,散乱断面積は最大となり,実光子弾性散乱の直接観測が期待される.しかし,こ の場合,エネルギー0.5 MeV程度の高強度かつ十分に収束性のよい光子源の実現が課題である.
4
図 1.2 光子‐光子弾性散乱の散乱断面積[2]
文献[2]Fig.4を基に一部改変
本研究グループは中国科学院高能物理研究所(IHEP)の電子‐陽電子衝突型加速器施設(BEPC) を利用した光子‐光子衝突型加速器における実光子弾性散乱を観測する実験計画を,中国,欧州 の研究者と協力して進めている.本実験計画では逆コンプトン散乱によって高エネルギー光子を
⽣成し,光子‐光子衝突の重心系エネルギー1~2 MeV領域を実現する.実光子弾性散乱の背景事 象として,光子‐光子衝突による電子‐陽電子対⽣成がある.光子‐光子衝突の重心系エネルギ ーが 1~2 MeV領域の場合,電子‐陽電子対⽣成は実光子弾性散乱に対して105倍程度の反応断面 積をもつ[5].したがって,実光子弾性散乱と電子‐陽電子対⽣成の識別が本実験の重要な課題と なっている.
本研究では現実的なレーザー光や加速器パラメータによる光子‐光子衝突型加速器と測定器 を想定し,擬似的な信号事象,背景事象の⽣成,測定器シミュレーション,機械学習を用いた事 象選別の最適化を行い,実光子弾性散乱の観測に対する統計的有意性を評価する.特に,測定器 システムに磁場を印加することによる背景事象の排除効率を系統的に調査し,その有用性を検討 する.
5
2.
光子‐光子衝突型加速器
2.1. 加速器内のビーム
加速器内のビームの粒子の運動を記述する際,ビーム軌道の接線方向に𝑧軸,ビーム軌道の主法 線方向に𝑥軸,ビーム軌道の従法線方向に𝑦軸をとる.また,ビーム軌道に沿った長さを表す独立 変数𝑠を導入する.このとき粒子のビーム軌道に対する傾き𝑥′,𝑦′は(2.1)式で定義される.
𝑥′≡𝑑𝑥
𝑑𝑠 , 𝑦′ ≡𝑑𝑦
𝑑𝑠 (2.1)
各粒子は収束用電磁石からの外力を受け,𝑥方向,𝑦方向に振幅と位相の進みが𝑠に依存する振動 を行なう.この振動はベータトロン振動と呼ばれ,𝑠の関数𝛽(𝑠)で表される.
ビームの質はエミッタンスと呼ばれる量で評価される.エミッタンスは位相空間(x, 𝑥′, 𝑦, 𝑦′)上 での粒子のばらつきを表し,(2.2)式で定義される.
𝜀𝑔𝑒𝑜𝑚.𝑥= √〈(𝑥 − 〈𝑥〉)2〉〈(𝑥′ − 〈𝑥′〉)2〉 − 〈(𝑥 − 〈𝑥〉)(𝑥′ − 〈𝑥′〉)〉2 (2.2)
𝜀𝑔𝑒𝑜𝑚.𝑥は𝑥方向の幾何学的エミッタンスと呼ばれ,𝑥方向のビームサイズ𝜎𝑥は
𝜎𝑥(𝑠) = √𝜀𝑔𝑒𝑜𝑚.𝑥𝛽(𝑠) (2.3)
で与えられる.幾何学的エミッタンスは運動量𝑝𝑥に反比例する.すなわち,ビームの進行方向の 加速に対し保存されない.そこで,規格化エミッタンス𝜀𝑛𝑜𝑟𝑚.𝑥を(2.4)式で定義する.
𝜀𝑛𝑜𝑟𝑚.𝑥= 𝛾𝜀𝑔𝑒𝑜𝑚.𝑥 (2.4)
ここで,𝛾はローレンツ因子である.規格化エミッタンスはビームの進行方向の加速に対し保存さ れる.これらは𝑦方向についても同様である.
2.2. ルミノシティ
衝突型加速器において,ある素粒子反応の反応頻度Nは(2.5)式のように書ける.
N = 𝜎L (2.5)
ここで,𝜎は反応断面積,すなわち反応の起こりやすさを表し,物理法則に従って計算される.
一方,Lはルミノシティと呼ばれ,衝突点での粒子の衝突頻度を表し,加速器の設計に従って計算 される.特に,ビーム軸と垂直な面に広がる粒子数がガウス分布で近似できるビーム同士が正面 衝突する場合, ルミノシティは(2.6)式で表される.
L = N1N2
4𝜋𝜎𝑥𝜎𝑦𝑓 (2.6)
ここで,N1,N2は各ビームのバンチに含まれる粒子数,𝑓は単位時間あたりにバンチが繰り返さ れる数,𝜎𝑥,𝜎𝑦はそれぞれ衝突点での𝑥方向, 𝑦方向のビームサイズである.バンチとは,進行す るビーム中の粒子が形成するひとつの集団である.
6 2.3. 加速器パラメータ
図2.1に光子‐光子衝突型加速器の概略を示す.
図 2.1 光子‐光子衝突型加速器の概略図[6]
光子-光子衝突型加速器は,IHEP の電子‐陽電子衝突型加速器施設 Beijing Electron Positron Collider(BEPC)に併設する.電子ビーム同士が衝突する直前に電子ビームにレーザー光を照射し,
逆コンプトン散乱によって⽣成された高エネルギー光子同士を衝突させる.
表2.1にレーザー光および電子ビームのパラメータを示す.
表 2.1 レーザー光および電子ビームのパラメータ
レーザー光 電子ビーム
レーザー波長 1.054 μm 電子ビームエネルギー 衝突点でのビームサイズ
200 MeV 2 μm CPでのレーザーウエスト径 5 μm
レイリー範囲 298 μm 衝突点でのβ関数 電子バンチ電荷
626 μm レーザーパルスエネルギー 2 J 2 nC
レーザーパルス長 600 ps 電子バンチ長 600 μm 繰り返し数 50 Hz 繰り返し数 50 Hz
IP-CP間距離 400 μm エミッタンス 6.39 × 10−3 μm
非線形パラメータ 0.32 幾何学的ルミノシティ 1.6 × 1028
ここで,レーザーパルス長,電子バンチ長は強度の⼆乗平均平方根として定義している.また,
IPは相互作用点(Interaction Point),CPはコンプトン散乱点(Conversion Point)を表してい る.レーザーパルス,電子バンチあたりの粒子数はそれぞれおよそ1.06 × 1019個,1.25 × 1010個 含まれ,波長1.054 μmのレーザーは⾚外線領域のレーザーで光子のエネルギーは1.176 eVである.
2.4. 逆コンプトン散乱による高エネルギー光子の⽣成
図2 .2は逆コンプトン散乱の様子を模式的に表したものである.図2 .2中の青色の直線は電子 の経路,橙色の波線は光子の経路を表している. 𝒎𝟎は電子の静止質量,𝜸はローレンツ因子,𝒄は 光速度,𝝓は衝突角,𝜽は光子の散乱角,𝜽′は電子の散乱角である.
7
図 2.2 逆コンプトン散乱の模式図
このとき入射電子,入射光子,散乱電子,散乱光子の4元運動量はそれぞれ
𝑃e𝜇=𝐸𝑒 𝑐 (
1 𝛽 00
) , 𝑃𝛾𝜇=𝐸γ 𝑐 (
1 cos 𝜙 sin 𝜙
0
) , 𝑃𝑒′𝜇 =𝐸𝑒′ 𝑐 (
1 𝛽′cos 𝜃′ 𝛽′sin 𝜃′
0
) , 𝑃𝛾′𝜇=𝐸𝛾′ 𝑐 (
1 cos 𝜃 sin 𝜃 0
) (2.7)
と書ける.4元運動量保存則より(2.7)式は
{
𝐸𝑒+ 𝐸γ= 𝐸𝑒′+ 𝐸𝛾′ 𝑚0𝑐𝛾𝛽 +𝐸γ
𝑐 cos 𝜙 = 𝑚0𝑐𝛾′𝛽′cos 𝜃′+𝐸𝛾′ 𝑐 cos 𝜃 𝐸γ
𝑐 sin 𝜙 = 𝑚0𝑐𝛾′𝛽′sin 𝜃′+𝐸𝛾′ 𝑐 sin 𝜃
(2.8)
となり,(2.8)式を散乱光子のエネルギー𝐸𝛾′について解くと
𝐸𝛾′ = 𝐸𝛾(1 − 𝛽 cos 𝜙) (1 − 𝛽 cos 𝜃) +𝐸𝛾
𝐸𝑒(1 − cos(𝜙 − 𝜃))
(2.9)
を得る.表2.1に示した入射光子のエネルギーと入射電子のエネルギーを代入すると,
𝛽 = 0.999997となり,衝突角,散乱角と散乱光子のエネルギーの関係は図2.3のようになる.
図 2.3衝突角,散乱角と散乱光子のエネルギーの関係
8
𝜙 = 𝜋 かつ𝜃 = 0のとき散乱光子のエネルギーは最大となる.散乱光子の最大エネルギー𝐸𝛾MAX′ を 𝐸𝛾,𝐸𝑒の関数で表すと
𝐸𝛾MAX′ = x
1 + x𝐸𝑒 (2.10)
と書ける.ただし,(2.10)式においてx = 4𝐸𝑒𝐸𝛾⁄(𝑚0𝑐2)2であり,表2.1のパラメータを用いると,
x = 0.003603,𝐸𝛾MAX′ = 0.718 MeVとなる.逆コンプトン散乱過程において,レーザー場の強度が 高く,非線形効果の影響を考慮した場合,(2.10)式は非線形パラメータa0を用いて
𝐸𝛾MAX′ = x
1 + a02+ x𝐸𝑒 (2.11)
のように変更される.表2.1の非線形パラメータを代入すると𝐸𝛾MAX′ = 0.652 MeVとなる.また,
非線形コンプトン散乱過程では1個の電子と複数のレーザー光子が同時に反応する多光子吸収過 程が起こる.この場合,(2.11)式で計算される散乱光子の最大エネルギーよりもエネルギーが高 い光子が⽣成される.後述する光子‐光子衝突のルミノシティ計算では,コンプトン散乱におけ る非線形効果を考慮している.
現在,設計している光子‐光子衝突型加速器では,加速された電子ビームにレーザー光を
𝜙 = 𝜋で照射する.散乱光は電子の進行方向に1/γ程度の角度広がりで散乱される.そのような
系を互いに向かい合うように配置し,重心系エネルギー1~2 MeV領域を実現する.
2.5. 相互作用領域と測定器の配置
図2.4に光子‐光子衝突型加速器の相互作用領域を示す.図2.4 中の青色の矢印は加速された 電子ビーム,橙色の矢印はレーザー光,緑色の矢印は逆コンプトン散乱によって⽣成された高エ ネルギー光子の経路を表している.電子ビームは永久磁石を用いて,相互作用点に収束される.
この永久磁石の内径は3 𝐦𝐦,外径は50 𝐦𝐦であり,相互作用点から100 𝐦𝐦手前に配置される.
コンプトン散乱点は,相互作用点の 400 𝛍𝐦手前に置かれる設計である.レーザー光は相互作用 点から 80 𝐦𝐦離れたミラーによってコンプトン散乱点で電子ビームと正面衝突するように集光 される.光子‐光子衝突型加速器の相互作用領域は高エネルギー光子同士の相互作用点を中心に 左右対称である.したがって,相互作用点では高エネルギー光子同士の衝突の他,電子ビーム同 士の衝突,高エネルギー光子と電子ビームの衝突も考慮する必要がある.
図 2.4 光子‐光子衝突型加速器の相互作用領域
9
図2.5に光子‐光子衝突型加速器の測定器のビーム軸と垂直な断面及びビーム軸に沿った断面 を示す.測定器にはシンチレータを用いた熱量測定システム(カロリメータ)を用いる.1 個のシ ンチレータは,断面積が15.2 𝐦𝐦×15.2 𝐦𝐦,厚み10 𝐦𝐦のプラスチックシンチレータの裏に厚 さ60 𝐦𝐦の台形状のCsI結晶を組み合わせた構成である.シンチレータは,ビーム軸と垂直な面 に62個,ビーム軸に沿って 21個,合計1,302個がビーム軸に沿って円筒状に配置される.本実 験のエネルギー領域では,電子‐陽電子対⽣成過程で⽣成される電子と陽電子の運動量は数
100 KeV程度である.このような低エネルギーの電子や陽電子は,空気中においても多重散乱の影
響を受け,また吸収される確率も高い.そのため,測定器全体は高真空を保ち,空気の影響を避 ける設計となっている.
図 2.5 測定器のビーム軸と垂直な断面図(左)とビーム軸に沿った断面図(右)
10
3.
実光子弾性散乱の背景事象排除
3.1. 信号事象と背景事象
光子‐光子衝突型加速器の相互作用点では,高エネルギー光子同士の衝突,電子ビーム同士の 衝突,高エネルギー光子と電子ビームの衝突が起こる.相互作用点で起こると考えられる過程は 以下のようなものがある.
・ γγ → γγ
高エネルギー光子同士の衝突による実光子弾性散乱
・ γγ → e−e+
高エネルギー光子同士の衝突による電子‐陽電子対⽣成
・ γγ → e−e+γ
電子‐陽電子対⽣成によって⽣成された電子もしくは陽電子が光子を放出する過程
・ γγ → e−e+γγ
電子‐陽電子対⽣成によって⽣成された電子と陽電子の両方が光子を放出する過程
・ e−e−→ e−e−
電子ビーム同士の衝突によるメラー散乱
・ γe−→ γe−
高エネルギー光子と電子ビームの衝突によるコンプトン散乱
・ γe−→ e−e+e−
高エネルギー光子と電子ビームの衝突による3粒子⽣成過程
本実験において信号事象はγγ → γγ過程であり,ほかの6種類の過程は背景事象である.
特に,重心系エネルギーが1~2 MeV領域の場合,γγ → e−e+過程はγγ → γγ過程に対し105倍多く 起こる.前述のように,γγ → e−e+過程で⽣成される電子,陽電子の運動量は数100 KeV程度であ る.電子,陽電子が測定器内の物質中に吸収された場合,電子はそのエネルギーを物質に付与す るが,陽電子は物質中の電子と対消滅を起こし,約511 KeVのエネルギーをもつ2個の光子を⽣
成する.この陽電子の対消滅によって⽣成された光子が測定器に与える信号は,実光子弾性散乱 の終状態の光子が測定器に与える信号と類似しており,これらを識別することが本実験の重要な 課題である.
11
図3.1に,測定器内でγγ → γγ過程とγγ → e−e+過程のそれぞれの振る舞いの典型的な例を示す.
緑色の直線は光子,⾚色の直線は電子,青色の直線は陽電子の飛跡を表している.陽電子がプラ スチックシンチレータに衝突したことで⽣成された2個の光子がCsIシンチレータに信号を残し ている.
図 3.1 シミュレーションによる𝛄𝛄 → 𝛄𝛄過程(左)と𝛄𝛄 → 𝐞−𝐞+過程(右)の典型的な振る舞い
3.2. 加速器強度と事象の重なり
先行研究では,一回の光子‐光子バンチの衝突においてγγ → γγ過程とγγ → e−e+過程が同時に 起こる状況を無視できるルミノシティを想定し,信号事象の観測可能性の評価を行なった[5].し かし,加速器とレーザーはより高いルミノシティを実現する性能を備えている.その場合,同時 に複数の事象が重なって起こる状況が考えられる.本研究では図3.1のようにγγ → γγ過程とγγ → e−e+過程がそれぞれ独立して起こる場合(pile upなし)と,図3.2のようにγγ → γγ過程とγγ → e−e+過程それぞれに対してγγ → e−e+過程が同時に重なって起こる場合(pile upあり)を想定し て信号事象の観測可能性の評価を行なった.各事象に重なる事象数は平均1となるルミノシティ とし,事象数は平均1のポアソン分布として考慮した.
図 3.2 事象が重なって起こる𝛄𝛄 → 𝛄𝛄過程(左)と𝛄𝛄 → 𝐞−𝐞+過程(右)の典型的な振る舞い
12 3.3. 磁場印加による荷電粒子の運動
同時に複数の事象が重なって起こる状況では,統計的に有利になる一方,事象の識別が困難に なる.本実験において,信号事象の終状態は2個の光子であり,荷電粒子を含まない.一方,背 景事象の終状態は荷電粒子を含んでいる.
一様磁場中の荷電粒子はサイクロトロン運動する.このとき,ローレンツ力と向心力のつり合 いは
𝑚0𝛾𝑣2
𝜌 = 𝑒𝑣𝐵 (3.1)
と書ける.ここで,𝑚0は静止質量,𝛾はローレンツ因子,𝑣は速度,𝜌は曲率半径,𝑒は電気素量,
𝐵は磁束密度である.
光子‐光子衝突型加速器において相互作用領域にビーム軸と平行に一様磁場を印加すること を考える.このとき,横方向(相互作用点から測定器へ向かう方向)に速度をもつ荷電粒子はロ ーレンツ力により曲げられる.その曲率半径は荷電粒子の横方向運動量𝑝𝑡= 𝑚0𝛾𝑣と(3.1)式より
𝜌 = 𝑝𝑡
𝑒𝐵 (3.2)
となる.(3.2)式において,𝑝𝑡の単位はMKS単位系で[kg m/s]である. 𝑝𝑡の単位が[MeV/c]となる
ように単位系を変換すると
𝜌 = 𝑝𝑡
300𝐵 (3.3)
となる.(3.3)式において,曲率半径𝜌の単位は[m],磁束密度𝐵の単位は[T]である.
(3.3)式より背景事象の終状態に含まれる荷電粒子の曲率半径はその横方向の運動量に比例し,
磁場の大きさに反比例する.例えば,𝑝𝑡= 0.5 MeV, 𝐵 = 1.0 Tとした場合,𝜌~1.67 mmとなり,図 3.3のように終状態の荷電粒子は永久磁石の内径に収まり,測定器で検出されない.これにより,
γγ → γγ過程とγγ → e−e+過程の識別性能が高まると期待される.
図 3.3 測定器システムにソレノイド磁場を印加した場合の𝛄𝛄 → 𝐞−𝐞+過程の典型的な振る舞い
13
4.
シミュレーションによる事象の検出
4.1. 研究の流れ
本研究ではシミュレーションによる測定器の応答の評価とその結果に基づくデータの解析を 行ない,光子‐光子衝突型加速器における実光子弾性散乱の観測可能性の評価を行なう.
1) 擬似事象の⽣成
表2.1に示したレーザー光や加速器のパラメータを考慮した事象のエネルギー分布,角度 分布を計算し,擬似事象を⽣成する.
2) 測定器シミュレーション
図2.5に示した測定器モデルを Geant4 に実装し,⽣成した擬似事象に対する測定器の応 答をシミュレーションする.
3) データ解析
シミュレーション結果に基づいて終状態の粒子の再構成を行なう.
信号事象と背景事象を選別するための特徴量を再構成された粒子の情報から抽出し,その 特徴量に基づいて機械学習による事象選別の最適化を行なう.
4.2. 擬似事象の⽣成
まず,CAIN[7]を用いて逆コンプトン散乱後の光子および電子のエネルギー分布,相互作用点 の光子のエネルギー分布を計算した.CAIN はレーザー光や電子ビームのパラメータを基に,高 エネルギー加速器におけるビーム相互作用を計算する数値計算プログラムである.CAIN は電子 ビームの強い電磁場による電子バンチの形状変化,電子から光子の輻射,輻射された光子と電子 ビームの相互作用,レーザーと電子のコンプトン散乱などについてシミュレーションを行い,レ ーザーや加速器のパラメータを考慮した現実的なルミノシティを計算することができる.また,
これらの相互作用には非線形電磁相互作用の効果も取り入れられている.
続いて,事象の角度分布を計算するため,微分散乱断面積を衝突する2個の光子の重心系エネ ルギー𝜔𝛾𝛾,2 個の光子のヘリシティの組み合わせhγγの関数として,ルミノシティを𝜔𝛾𝛾,hγγ, αγγの関数として求めた.ここで,αγγは(4.1)式で定義され,衝突する2個の光子のエネルギー非 対称性を表している.
αγγ ≡𝐸𝛾1− 𝐸𝛾2
𝐸𝛾1+ 𝐸𝛾2 (4.1)
事象の角分布はこれらの畳み込みで計算でき,単位時間当たりの事象数Nは,極角𝜃の関数として (4.2)式で書ける.
𝑑Nγγ,hγγ
𝑑𝜃 (ωγγ, αγγ) =𝑑σγγ,hγγ
𝑑𝜃 (ωγγ)𝑑Lγγ,hγγ
𝑑ωγγ (ωγγ, αγγ)𝑑ωγγ (4.2) 微分散乱断面積は文献[8][9]を基にし,微分ルミノシティはCAINを用いて計算した.図4.1 に 光子‐光子衝突の各ヘリシティの組み合わせごとの微分ルミノシティ分布を示す.
14
図 4.1 光子‐光子衝突の微分ルミノシティ分布[5]
背景事象の⽣成には,WHIZARD[10]を用いた.WHIZARDは,素粒子相互作用による散乱断 面積の計算,擬似事象⽣成のためのプログラムである.光子‐光子衝突のルミノシティ分布は
WHIZARD に内蔵されている CIRCE2 というプログラムを介して,実際の設計に即したエネル
ギーとルミノシティ分布を反映させた.
全事象数を計算するため,有効散乱断面積を(4.3)式で定義した.
𝜎𝑒𝑓𝑓≡ 1
L𝑡𝑜𝑡𝑎𝑙γγ ∑ ∫ σγγ,hγγ(ωγγ)𝑑Lγγ,hγγ
𝑑ωγγ (ωγγ, αγγ)𝑑ωγγ hγγ
(4.3)
ここでL𝑡𝑜𝑡𝑎𝑙γγ は各ヘリシティの組み合わせの積分ルミノシティの和であり,(4.4)式で定義される.
L𝑡𝑜𝑡𝑎𝑙γγ ≡ ∑ ∫𝑑Lγγ,hγγ
𝑑ωγγ (ωγγ, αγγ)𝑑ωγγ hγγ
(4.4)
表 2.1 を基に計算された光子‐光子衝突の積分ルミノシティL𝑡𝑜𝑡𝑎𝑙γγ は8.715 × 1028 /cm2/sである.
表4.1に計算された信号事象および背景事象の有効散乱断面積と年間(~107s)⽣成事象数を示す.
表 4.1 信号事象および背景事象の有効散乱断面積と年間⽣成事象数 事象の種類 有効散乱断面積 𝝈𝒆𝒇𝒇 (𝛍𝐛) 年間⽣成事象数
𝛄𝛄 → 𝛄𝛄 0.46 664
𝛄𝛄 → 𝐞−𝐞+ 3.5×104 5.0×107
ここで,年間⽣成事象数は各事象が重ならず,それぞれ独立して起こることを想定している.ま
た,γγ → e−e+過程の散乱断面積は,終状態の粒子の少なくとも一つが測定器の角度許容範囲に収
まるように角度分布に対して(|cosθ|<0.8944)の制限を課して計算した.
4.3. 測定器シミュレーション
⽣成した信号事象および背景事象が図2.5で示した測定器モデルでどのように検出されるのか
をGeant4[11]を用いて計算した.Geant4は測定器の応答をシミュレーションするためのソフト
ウェアツールキットである.Geant4はユーザーが定義する物質に対し,粒子と物質の相互作用を 考慮し,粒子の崩壊や⽣成,エネルギー損失を計算する.
15
図2.5に示した測定器モデルをGeant4に実装し,⽣成した擬似事象ごとに終状態の粒子がヒ ットした測定器の位置とその測定器におけるエネルギー損失を計算した.
16
5.
データ解析
5.1. 運動量ベクトルの定義
Geant4を用いたシミュレーションの計算結果は測定器の分解能を考慮していない.そのため,
プラスチックシンチレータとCsIシンチレータを用いた測定器の典型的な分解能を考慮して,エ ネルギー損失の値に揺らぎを与え,実際の測定器で観測されるエネルギーを再現した.ここで,
プラスチックシンチレータおよび CsI シンチレータの分解能はそれぞれ𝑑𝜎/ 𝐸 = 0.059/√𝐸, 𝑑𝜎/ 𝐸 = 0.0243/√𝐸とした.
次に,測定されたエネルギー損失を基に運動量ベクトル 𝒑𝑖を次のように定義した.
𝒑𝑖= 𝐸𝑖𝒓𝑖 (5.1)
ここで,𝐸𝑖はプラスチックシンチレータもしくは CsI シンチレータにおけるエネルギー損失,𝒓𝑖 は相互作用点から各シンチレータの中心を指す方向の単位ベクトルである.
5.2. ジェットクラスタリング
ある事象に対する終状態の粒子の情報と(5.1)式で定義される運動量ベクトルをもつ粒子の情 報が異なる場合がある.例えば,図5.1のような場合を考える.
図 5.1 複数の測定器にヒットする粒子の飛跡の模式図
図5.1 において,2 個の粒子がエネルギー損失を与えた測定器を緑色で塗りつぶしている.この 場合,事象の終状態は2個の粒子だが4個の測定器でエネルギーが検出されている.したがって,
測定器の情報から,物理的な粒子の情報を再構成する必要がある.本研究では,ジェットクラス タリングと呼ばれる手法を用いて粒子の再構成を行なった.
まず,(5.1)式で定義された運動量ベクトルをもつN個の粒子のうち2個を選び,その2個の粒 子𝑖,粒子𝑗に対する粒子間距離𝑦𝑖𝑗を(5.2)式で定義する.
𝑦𝑖𝑗=2 min(𝐸𝑖2, 𝐸𝑗2) (1 − cos 𝜃𝑖𝑗)
𝑄 (5.2)
ここで,𝐸𝑖は粒子𝑖のエネルギー,𝜃𝑖𝑗は粒子𝑖,粒子𝑗のなす角度,𝑄は(5.1)式で定義された運動量 ベクトルをもつN個の粒子のエネルギーの和である.(5.1)式で定義された運動量ベクトルをもつ
17
N個の粒子から 2 個選ぶすべての組み合わせに対して粒子間距離𝑦𝑖𝑗を計算する.ここで,𝑦𝑐𝑢𝑡と いう値を導入し,𝑦𝑖𝑗 ≤ 𝑦𝑐𝑢𝑡を満たす2個の粒子𝑖,粒子𝑗の4元運動量の和を計算し,その4元運 動量をもつ 1個の擬似粒子に置き換える.このようにしてN個の粒子を逐次的に合成する.クラ スタリングパラメータ𝑦𝑖𝑗の定義によってジェットクラスタリングには種類がある.(5.2)式のよう に定義されるものはDharamアルゴリズム[12][13]と呼ばれ,高エネルギー物理学実験で広く使 われている.
信号事象であるγγ → γγの終状態の粒子は2個の光子である.したがって,ジェットクラスタリ ングによりジェットが2本だけ残ることが望ましい.本研究では,𝑦𝑐𝑢𝑡の値を決めるにあたり,2 つの方法を用いた.
1)強制2ジェットクラスタリング
N個の粒子が2本のジェットになるまで𝑦𝑐𝑢𝑡の値を変えながら擬似粒子への置き換えを繰り 返す.
2)2ジェット選抜
N個の粒子が2本のジェットとなる確率の高い𝑦𝑐𝑢𝑡の値を設定する.
このため,𝑦𝑐𝑢𝑡の値を変化させ,ジェットクラスタリングにより2ジェットとなる事象の数 を調べた.𝑦𝑐𝑢𝑡の値の変化によるジェットクラスタリング後の粒子が2 個になる事象数の変
化を図5.2~図5.3に示す.
図 5.2 𝒚𝒄𝒖𝒕の値による2ジェット事象数の変化 (𝟏. 𝟎 × 𝟏𝟎−𝟖≤ 𝒚𝒄𝒖𝒕≤ 𝟏𝟎)
図 5.3 𝒚𝒄𝒖𝒕の値による2ジェット事象数の変化 (𝟏. 𝟎 × 𝟏𝟎−𝟒≤ 𝒚𝒄𝒖𝒕≤ 𝟏. 𝟎 × 𝟏𝟎−𝟐)
18
図5.2において,1.0 × 10−4≤ 𝑦𝑐𝑢𝑡 ≤ 1.0 × 10−2でジェットクラスタリング後に2ジェットと なる信号事象数のピークが見られる.さらに図5.3において,1.0 × 10−3≤ 𝑦𝑐𝑢𝑡≤ 1.0 × 10−2 でジェットクラスタリング後に2ジェットとなる信号事象数の変化が小さいのに対し,背景 事象数は単調的に増大している.したがって,𝑦𝑐𝑢𝑡= 1.0 × 10−3でジェットクラスタリングを 行なうと,2ジェットとなる信号事象数が多く,背景事象数が少なくなる.また,𝑦𝑐𝑢𝑡の値と ジェットクラスタリング後の粒子が3個,4個になる事象数の関係をそれぞれ図5.4~図5.5 に示す.
図 5.4 𝒚𝒄𝒖𝒕の値による3ジェット事象数の変化 (𝟏. 𝟎 × 𝟏𝟎−𝟒≤ 𝒚𝒄𝒖𝒕≤ 𝟏. 𝟎 × 𝟏𝟎−𝟐)
図 5.5 𝒚𝒄𝒖𝒕の値による4ジェット事象数の変化 (𝟏. 𝟎 × 𝟏𝟎−𝟒≤ 𝒚𝒄𝒖𝒕≤ 𝟏. 𝟎 × 𝟏𝟎−𝟐)
図5.4 および図5.5において,ジェットクラスタリング後の背景事象数が信号事象数に対し 多くなっている.したがって,𝑦𝑐𝑢𝑡 = 1.0 × 10−3でジェットクラスタリング後を行ない,2ジ ェットとなる事象のみ選抜することによって多くの背景事象は排除される.
なお,強制2ジェットクラスタリングおよび2ジェット選抜において,ジェットクラスタリング の計算にはFastJet[14]を用いた.また,再構成された2個の粒子のエネルギー|𝒑1|,|𝒑2|は|𝒑1|の 方が高くなるように定義した.
19 5.3. 機械学習を用いた事象選別
信号事象と背景事象を選別するために機械学習を用いた.一般的に機械学習は教師あり学習と 教師なし学習の2通りの方法がある.本研究では教師あり学習を用いた.事象選別に際して,ま ず信号事象や背景事象の特徴を表す量(特徴量)𝑥𝑖を定義する.事象選別は特徴ベクトル𝒙 = (𝑥1, 𝑥2, … , 𝑥𝑛)(𝑛は特徴量の数)によって張られる𝑛次元の特徴空間において,信号事象と背景事 象を分離することを意味する.教師あり学習では,それぞれの事象について信号事象または背景 事象であることが分かっているデータ(教師データ)を用いて,信号事象と背景事象の分離方法 を学習させる.その学習結果を,教師データと独立に用意されたテストデータに応用することで,
事象選別の性能を評価する.機械学習の方法は,ニューラルネットワーク,決定木,カットなど いろいろな種類が存在するが,本研究では後述するBoosting Decision Tree(BDT)を用いた.
5.4. 特徴量分布と事前選別
再構成された終状態の粒子の情報について,以下の9つの量を定義し,機械学習に用いる特徴 量とした.
・ 𝐸𝑖≡ |𝒑𝑖|
終状態の粒子のエネルギー
・ 𝐸all≡ ∑𝑖=1,2𝐸𝑖
各事象の全エネルギー
・ 𝐸𝑖psc
終状態の粒子のプラスチックシンチレータによるエネルギー損失
・ cos 𝜃𝒑𝑖
𝜃𝒑𝑖は終状態の粒子の運動ベクトルがなす角度
・ 𝜃acl≡ 𝜋 − ∠𝒑1𝒑2
終状態の2粒子がなす角度(acolinearity angle)
・ 𝜃acp≡ 𝜋 − ∠𝒑1⊥𝒑2⊥
終状態の2粒子のxy平面への射影がなす角度(acoplanarity angle)
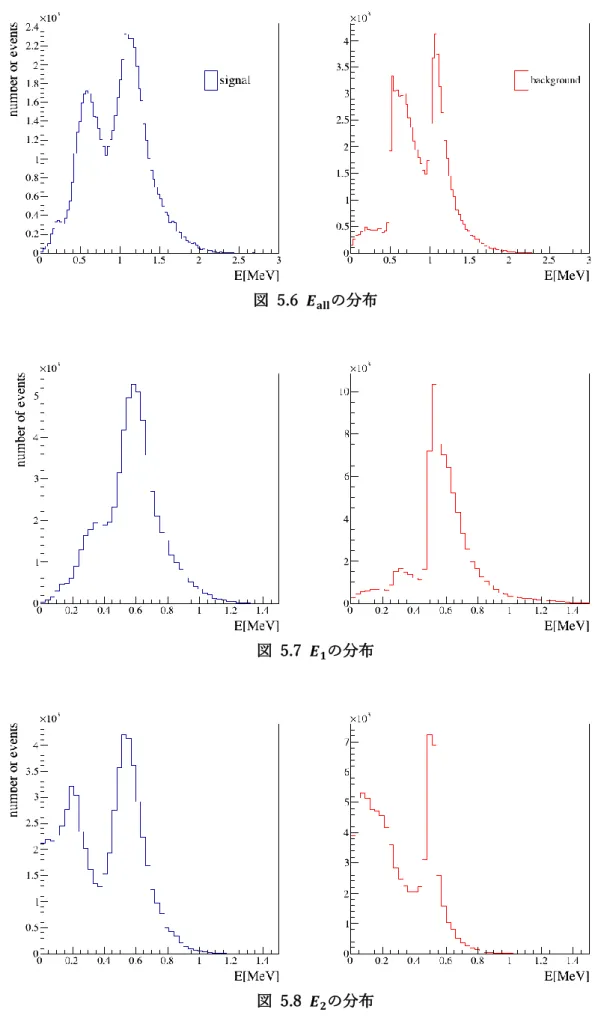
図5.6~図5.14に信号事象と背景事象の教師データについて,9つの特徴量の分布を示す.
20
図 5.6 𝑬𝐚𝐥𝐥の分布
図 5.7 𝑬𝟏の分布
図 5.8 𝑬𝟐の分布
21
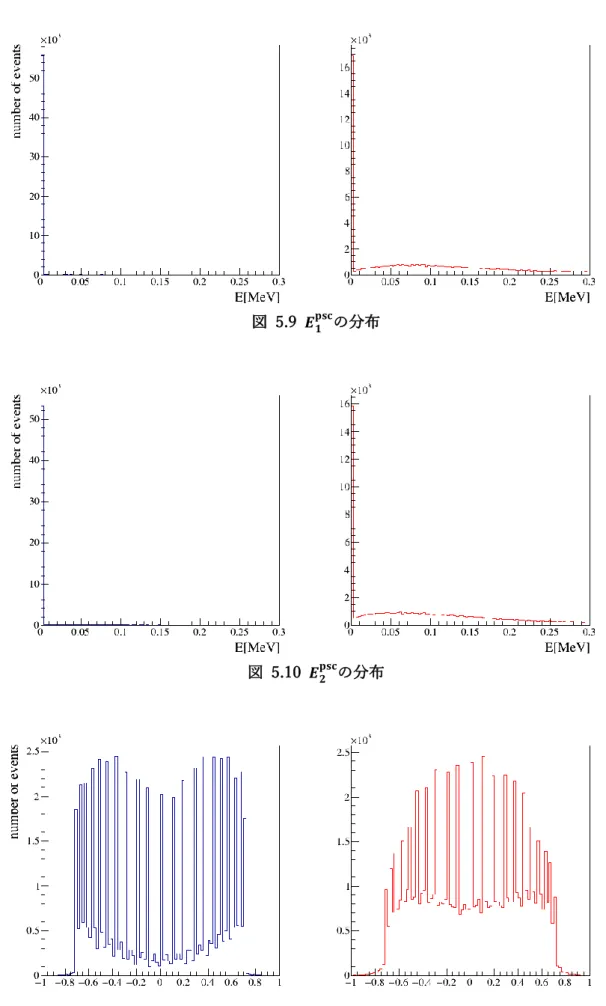
図 5.9 𝑬𝟏𝐩𝐬𝐜の分布
図 5.10 𝑬𝟐𝐩𝐬𝐜の分布
図 5.11 𝐜𝐨𝐬 𝜽𝒑𝟏の分布
22
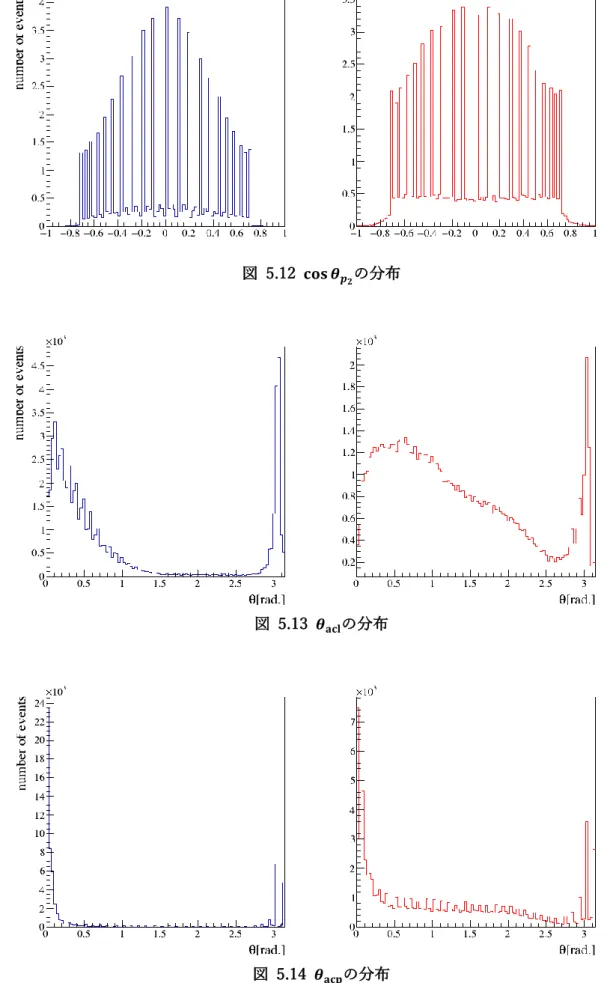
図 5.12 𝐜𝐨𝐬 𝜽𝒑𝟐の分布
図 5.13 𝜽𝐚𝐜𝐥の分布
図 5.14 𝜽𝐚𝐜𝐩の分布
23
図5.6~図5.14は磁場を印加していないデータについて強制2ジェットクラスタリングを行なっ
た場合の特徴量分布である.この段階では,信号事象数に対して背景事象数が非常に多い.事象 選別を効率的に行なうため,以下の条件で事前選別(preselection)を行なった.
・ 𝐸all< 2.5 MeV
200 MeV程度の電子の衝突による事象と0.5~1 MeV程度のエネルギーの光子同士の衝突によ
る事象を選別する.
・ 𝐸1psc= 𝐸2psc= 0
信号事象の終状態は2光子であり,プラスチックシンチレータでのエネルギー損失はない.
一方,終状態に荷電粒子を含む場合,プラスチックシンチレータでのエネルギー損失がある.
図5.9および図5.10より背景事象の𝐸1psc, 𝐸2pscの分布は全域に分布しているのに対し,信号事 象の𝐸1psc, 𝐸2pscの分布は𝐸1psc= 0, 𝐸2psc = 0の局所に分布している.
・ 𝜃acp< 0.15
0.5~1 MeV程度のエネルギーの光子同士の衝突による光子の散乱方向は運動量保存則により
𝑥𝑦平面上で相互作用点に対し対称になる.図5.14より信号事象の𝜃acpは小さい値に集中して いる.
5.5. BDTによる選別と評価
機械学習を用いた事象選別には,ROOT[15]の多変数解析ツールキット(Toolkit for Multi-
Variable Analysis : TMVA)のBDTを用いた.BDTとは各特徴量について,信号事象と背景事象
を分類する閾値を逐次的に決定し,決定木(Decision Tree)を形成する方法を後述のように
Boosting という手法を用いて,その性能を向上させたものである.図5.15 に決定木の概念図を
示す.
図 5.15 決定木の概念図
決定木はまず,Root nodeと呼ばれる信号事象と背景事象が最も混在した状態を適切に分類する 変数を探して閾値𝑐1を決定する.続いて,分類された事象に対してさらに分類する変数を探して 閾値𝑐2を決定する.これを繰り返し行ない,事象が最も分類された状態(Leaf node)が信号事象な のか背景事象なのかを識別する.カットによる選別は特徴量の数とNodeの数が等しい.一方,
24
決定木による選別は,あるNodeにおいて分類に用いられた変数は他のNodeにおける分類に用 いられる場合があるため,特徴量の数以上のNodeの数が存在する.
一般にBoostingとは,学習の過程において,学習のパラメータを連続的に変化させ,学習の性
能を向上させる手法である.本研究では,Adaptive Boosting(Ada Boosting)と呼ばれる手法を採
用した.Ada Boostingは,誤って選別された事象について,(5.3)式で表される重み𝑤を計算する.
𝑤 =1 − 𝑒𝑟𝑟
𝑒𝑟𝑟 (5.3)
ここで,𝑒𝑟𝑟はある事象が誤って選別される確率である.これにより,次の学習過程で誤って選別 された事象の重みを大きくし,誤って選別されにくいように,学習の性能を向上させる.
BDTの出力は,事象ごとに信号事象らしさ,背景事象らしさを数値化したものである.この数 値をBDT valueと呼び,BDT value = 1に近いほどその事象は信号事象らしく,BDT value = −1に近 いほどその事象は背景事象らしいことを表す.
信号事象の観測可能性評価のため,統計的有意性(significance)を(5.4)式で定義する.
significance ≡ NS
√NS+NB (5.4)
ここで,NSはあるBDT value以上の信号事象数,NBはあるBDT value以上の背景事象数である.し たがって,統計的有意性はBDT valueの関数で表される.
図5.16にBDT valueの分布とBDT valueの分布から計算される統計的有意性の典型的な例を示す.
.
図 5.16 𝐁𝐃𝐓 𝐯𝐚𝐥𝐮𝐞の分布(左)と
𝐁𝐃𝐓 𝐯𝐚𝐥𝐮𝐞の分布から計算される統計的有意性(右)の典型的な例
25
6.
解析結果
表6.1にGeant4によるシミュレーションを行なった擬似事象の種類と計算事象数を示す.
表 6.1 Geant4による測定器シミュレーションを行なった擬似事象の種類と計算事象数 擬似事象の種類 計算事象数
𝛄𝛄 → 𝛄𝛄 (pile upなし) 教師 1.0×105
テスト 3.0×105
𝛄𝛄 → 𝐞−𝐞+ (pile upなし) 教師 1.0×105
テスト 2.0×106
𝛄𝛄 → 𝛄𝛄 (pile upあり) 教師 1.0×105
テスト 3.0×105
𝛄𝛄 → 𝐞−𝐞+ (pile upあり) 教師 1.0×105
テスト 2.0×106
表6.1 に示した8種類の擬似事象データについて,それぞれ0~1 Tまで0.1 Tごとに磁場を印加し た場合の測定器シミュレーションを行なった.
図6.1にpile up なしの教師データについて強制2ジェットクラスタリングを行なった場合の
事前選別前後の事象数の磁場依存性を示す.黒色の点は事前選別前の信号事象数,⾚色の点は事 前選別後の信号事象数,緑色の点は事前選別前の背景事象数,青色の点は事前選別後の背景事象 数を表している.縦軸はGeant4で計算を行なった10万事象数のうち,それぞれジェットクラス タリングで残った事象数を表している.
図6.1の場合,事前選別前後の信号事象数は磁場の大きさに依存しない.これは信号事象の終状 態が2個の光子であり,磁場の影響を受けないからである.一方,事前選別前の背景事象数は印 加する磁場の大きさが大きくなるにつれて減少している.これは背景事象の終状態が電子と陽電 子であり,磁場の影響を受けて測定器に達するまでにその運動方向が曲げられるからである.事 前選別後の背景事象数は磁場を印加しない場合に比べ,磁場を印加した場合の方が多い.これは 磁場の影響で運動方向を曲げられた陽電子が物質に衝突し対消滅を起こし,0.511MeVの2個の光 子がそれぞれ逆方向に放出され,測定器で検出されるからである.さらに,B = 0.1 Tのときに事 象数が最も多く,磁場の大きさが大きくなるにつれて減少している.これは磁場の大きさが大き くなるにつれて荷電粒子の曲率半径が小さくなり,図2.5 で示した永久磁石の内径に収まり,測 定器で検出されない事象が増えるからである.
26
図 6.1 事前選別前後の事象数の磁場依存性(pile upなし,強制2ジェット)
図6.2にpile up なしのテストデータについて強制2ジェットクラスタリングを行なった場合の
統計的有意性の磁場依存性を示す.各点は各磁場の大きさでのsignificance-BDT valueのグラフ において計算された significance から統計誤差を引いた値が最大となるときの significance の値 を表し,各誤差範囲は±1σである.
図 6.2 統計的有意性の磁場依存性(pile upなし,強制2ジェット)
図6.2の場合,統計的有意性は磁場の大きさに関わらず4σ~7σ程度である.B = 1 Tの磁場を印加 した場合ついても,磁場を印加しなかった場合と同程度の統計性有意性が得られた.
27
続いて,図6.3にpile up なしの教師データについて2ジェット選抜を行なった場合の事前選 別前後の事象数の磁場依存性を示す.
図 6.3 事前選別前後の事象数の磁場依存性(pile upなし,2ジェット選抜)
図6.3の場合,事前選別前後の信号事象数は磁場の大きさに依存せず,事前選別後の背景事象数 は磁場を印加しない場合に比べ,磁場を印加した場合の方が多い.さらに,B = 0.1 Tのときに事 象数が最も多く,磁場の大きさが大きくなるにつれて減少している.これらは図6.1の場合と同 様である.
図6.4にpile up なしのテストデータについて2ジェット選抜を行なった場合の統計的有意性の
磁場依存性を示す.
図 6.4 統計的有意性の磁場依存性(pile upなし,2ジェット選抜)
図6.4の場合,ほとんどの統計的有意性は磁場の大きさに関わらず4σ~7σ程度であり,B = 0.1 T の磁場を印加したとき,統計的有意性は著しく低下している.これは,B = 0.1 Tのときに陽電子 の対消滅による2個の光子が測定器で検出される確率が高いからだと考えられる.
28
続いて,図6.5にpile up ありの教師データについて強制2ジェットクラスタリングを行なっ た場合の事前選別前後の事象数の磁場依存性を示す.
図 6.5 事前選別前後の事象数の磁場依存性(pile upあり,強制2ジェット)
図6.5の場合,事前選別前後の背景事象数の変化は図6.1 の場合と同様である.事前選別前の信 号事象は磁場の大きさが大きくなるにつれて減少している.これは1個の光子に電子,陽電子が 重なって検出された事象が,磁場を印加することにより荷電粒子が測定器で検出されにくくなり,
1 個の光子のみの事象として検出され,ジェットクラスタリングによって排除される数が多くな るからである.一方,事前選別後の信号事象は磁場の大きさが大きくなるにつれて増大している.
これは2個の光子に電子,陽電子が重なって検出された事象が,磁場を印加することにより荷電 粒子が測定器で検出されにくくなり,2個の光子のみの事象として検出され,図6.1の場合の状 況に近づいているからである.
図6.6にpile up ありのテストデータについて強制2ジェットクラスタリングを行なった場合の
統計的有意性の磁場依存性を示す.
図 6.6 統計的有意性の磁場依存性(pile upあり,強制2ジェット)
図6.6の場合,統計的有意性はB = 0.8 T以上の磁場を印加したときに8σ~10σ程度となる.磁場の 大きさが小さいときには,γγ → γγ過程に重なるγγ → e−e+過程が多いため,強制2ジェットクラ
29
スタリングによって再構成された信号事象は,理想的な実光子弾性散乱の終状態と一致しない.
したがって,事前選別により排除される信号事象数が多く,統計的有意性は低くなっている.
続いて,図6.7にpile upありの教師データについて2ジェット選抜を行なった場合の事前選 別前後の事象数の磁場依存性を示す.
図 6.7 事前選別前後の事象数の磁場依存性(pile upあり,2ジェット選抜)
図6.7の場合,事前選別前後の背景事象数の変化は図6.3 の場合と同様である.事前選別前後の 信号事象は磁場の大きさが大きくなるにつれて増大している.これは2個の光子に電子,陽電子 が重なって検出された事象が,磁場を印加することにより荷電粒子が測定器で検出されにくくな り,2個の光子のみの事象として検出され,理想的な実光子断線散乱に近い事象数が多くなるか らである.
図6.8にpile upありのテストデータについて2ジェット選抜を行なった場合の統計的有意性の
磁場依存性を示す.
図 6.8 統計的有意性の磁場依存性(pile upあり,2ジェット選抜)
図6.8の場合,統計的有意性はB = 0.8 T以上の磁場を印加したときに12σ~15σ程度となり,最も 高くなる.また,磁場を印加しなかったときの統計的有意性は8σ程度であり,図6.2,図6.4,図 6.6の磁場を印加しなかったときの統計的有意性と比べて,最も高い.
30
最も高い統計的有意性を得た,B = 0.9 Tの磁場を印加したときの pile up ありのテストデータ について 2ジェット選抜を行なった場合のBDT valueの分布とそのBDT valueの分布から計算され るsignificanceを図6.10に示す.
図 6.9 𝐁𝐃𝐓 𝐯𝐚𝐥𝐮𝐞の分布(𝐁 = 𝟎. 𝟗 𝐭𝐞𝐬𝐥𝐚,pile upあり,2ジェット選抜)(左)と 𝐁𝐃𝐓 𝐯𝐚𝐥𝐮𝐞の分布から計算されるsignificance(右)
図6.9より,BDT value = 0.39のとき統計的有意性は最も高くなる.
BDT value = 0.39で事象の選別を行なった場合,一年間(~107s)の運転で予想される信号事象数と 背景事象数を表6.2に示す.
表 6.2 一年間の運転で予想される事象数 事象の種類 予想される年間事象数
𝛄𝛄 → 𝛄𝛄 491±3
𝛄𝛄 → 𝐞−𝐞+ 671.9±387.9
表6.2に示した事象数から推定される統計的有意性は significance = 14.4 ± 2.4
となる.誤差は擬似事象の統計誤差によるものである.したがって,光子‐光子衝突型加速器を 一年間運転させたのち,84.2 %の確率で約12σを超える有意差で実光子弾性散乱を観測すること ができる.
31
7.
結論
光子‐光子衝突型加速器における実光子弾性散乱の観測可能性を評価した.特に,電子‐陽電 子対⽣成が,信号事象と重なって起こる場合を念頭に,検出器に磁場を印加することによる背景 事象分離の性能を評価した.
測定器全体に磁場を印加することにより,測定器での電子‐陽電子対⽣成の検出数は減少し,
実光子弾性散乱と電子‐陽電子対⽣成の識別性能は高まることが確認された.
加速器のルミノシティを高め,1 回の光子‐光子バンチの衝突で同時に複数の事象が重なって 起こる状況で,測定器シミュレーションを行ない,ジェットクラスタリングにより終状態が 2 ジェットとなる事象のみを取り出した結果,統計的有意性は高くなった.B = 0.9 Tの場合に,
一年間運転後の統計的有意性はsignificance = 14.4 ± 2.4となった.これは,背景事象の反応断面 積が大きく,信号事象と重なって起こる場合においても,磁場を印加することによって,信号事 象と背景事象を分離できることを示した.また,磁場を印加した場合の解析は,測定器の性能と しての課題である,荷電粒子の弁別性能に依存しておらず,信頼性が高い.これらの結果は,今 後の計画実現に向けた検討に大きく寄与するものである.
今後の課題としては以下のようなものがある.
・ 電子‐陽電子対⽣成以外の背景事象も考慮した事象選別,統計的有意性の計算を行なう.
・ 有効な特徴量の探索と利用する特徴量の最適化を行なう.
・ シミュレーションの計算数上昇によって統計誤差を縮小させる.
・ BDT以外の機械学習方法を用いた事象選別の有用性を検討する.
また,プラスチックシンチレータによる荷電粒子の弁別性能は,本研究において非常に重要であ り,実際の試作器によって検討し,その結果を取り入れたシミュレーションを行なう必要がある.
![図 2.1 光子‐光子衝突型加速器の概略図[6]](https://thumb-ap.123doks.com/thumbv2/123deta/6092616.2082434/6.892.139.759.594.866/図21光子光子衝突型加速器の概略図6.webp)