MICROSAR
プロダクトインフォメーション
目 次
MICROSAR - ベクターの AUTOSAR ECU ソフトウェア用ソリューション ... 3
MICROSAR.OS – AUTOSAR 仕様に対応したリアルタイムオペレーティングシステム... 9
MICROSAR.COM – 通信用 AUTOSAR ベーシックソフトウェアモジュール ... 12
MICROSAR Gateway – ゲートウェイ ECU 用のベーシックソフトウェア... 15
MICROSAR.CAN – CAN 通信用 AUTOSAR ベーシックソフトウェアモジュール ... 20
MICROSAR.FR – FlexRay 通信用 AUTOSAR ベーシックソフトウェアモジュール ... 23
MICROSAR.LIN – LIN 通信用 AUTOSAR ベーシックソフトウェアモジュール ... 26
MICROSAR.ETH – Ethernet 通信用 AUTOSAR ベーシックソフトウェアモジュール ... 29
MICROSAR V2G – 外部インフラ通信用 AUTOSAR ベーシックソフトウェアモジュール ... 33
MICROSAR AVB – Ethernet 経由のオーディオ/ビデオ用のベーシックソフトウェアモジュール ... 36
MICROSAR.MEM –メモリー管理用 AUTOSAR ベーシックソフトウェアモジュール ... 39
MICROSAR.SYS – AUTOSAR 用のシステム関連のベーシックソフトウェアモジュール ... 42
MICROSAR.DIAG – AUTOSAR に対応した UDS プロトコルの実装 ... 46
MICROSAR.MCAL –マイクロコントローラー周辺機能制御用 AUTOSAR ドライバー ... 51
MICROSAR.EXT – 外付デバイス制御用の AUTOSAR ドライバー... 55
MICROSAR.IO – AUTOSAR I/O ハードウェアの抽象化 ... 57
MICROSAR.RTE - AUTOSAR 仕様に対応したソフトウェアコンポーネント用に最適なランタイム環境 ... 60
MICROSAR.AMD – AUTOSAR のモニターおよびデバッグ ... 63
MICROSAR Safe – ISO 26262 ASIL D までに準拠した機能安全 ECU 対応 ... 67
MICROSAR Security –AUTOSAR ECU のためのアクセスセキュリティー ... 70
MICROSAR Multi-Core – マルチコアプロセッサー用の AUTOSAR ソリューション ... 73
MICROSAR バリアントハンドリング– AUTOSAR の柔軟なコンフィギュレーションのためのソリューション ... 76
MICROSAR J1939 – 大型車両専用の AUTOSAR ベーシックソフトウェアモジュール ... 79
MICROSAR.VTT – vVIRTUALtarget Basic による仮想統合 ... 81
MICROSAR.SIP と MICROSAR.EIP – AUTOSAR プロジェクトを迅速に始動 ... 85
AUTOSAR Evaluation Bundle – AUTOSAR ベーシックソフトウェアおよびツールの評価用総合パッケージ ... 89
その他の情報 ... 93
発行元:ベクター・ジャパン株式会社 www.vector-japan.co.jp
MICROSAR - ベクターの AUTOSAR ECU ソフトウェア用ソリューション
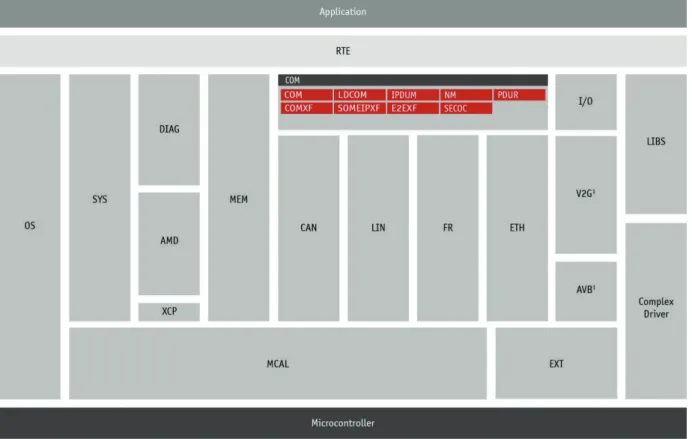
MICROSAR は、ECU ソフトウェア用の AUTOSAR ソリューションです。MICROSAR は、MICROSAR.RTE および MICROSAR ベーシックソ フトウェアモジュール (BSW) で構成されており、AUTOSAR 仕様のあらゆる面をカバーし、多くの拡張機能を備えています。AUTOSAR ベー シックソフトウェアモジュールにはそれぞれ、MICROSAR パッケージが 1 つずつ割り当てられています。各パッケージおよび MICROSAR.RTE についての詳細を以下にご説明していきます。ベクターでは、個々の「ソフトウェア統合パッケージ (SIP)」に必要なベーシックソフトウェアモジュー ルを組み合わせてご提供しています。
提供可能なMICROSAR パッケージの一覧
図1: AUTOSAR 仕様の全モジュールが含まれている MICROSAR パッケージ (AUTOSAR 4.2)
MICROSAR には以下のパッケージが含まれています。 パッケージ内容
パッケージ 内容
MICROSAR AMD アプリケーションとMICROSAR ベーシックソフトウェアのモニターおよびデバッグ MICROSAR AVB Ethernet 経由のオーディオ/ビデオ用のベーシックソフトウェアモジュール MICROSAR MCAL マイクロコントローラーの周辺機能操作用AUTOSAR ドライバー MICROSAR CAN CAN 通信用 AUTOSAR ベーシックソフトウェアモジュール
パッケージ 内容
MICROSAR.IO マイクロコントローラーの周辺機能とそのアプリケーション間のインターフェイス
MICROSAR ETH Ethernet 通信用 AUTOSAR ベーシックソフトウェアモジュール MICROSAR.LIBS AUTOSAR ライブラリー
MICROSAR.LIN LIN 通信用 AUTOSAR ベーシックソフトウェアモジュール
MICROSAR.MEM 不揮発性メモリー管理用AUTOSAR ベーシックソフトウェアモジュール
MICROSAR.OS AUTOSAR 仕様に対応したリアルタイムオペレーティングシステム
MICROSAR.RTE AUTOSAR 仕様に対応したソフトウェアコンポーネント用の最適なランタイム環境
MICROSAR Safe ECU ソフトウェア用の ISO 26262 準拠の ASIL D まで対応可能な機能安全メカニズム MICROSAR.SYS AUTOSAR ECU 用のシステム関連のベーシックソフトウェアモジュール
MICROSAR V2G 外部インフラとの通信用ベーシックソフトウェアモジュール
MICROSAR XCP XCP (Ethernet、FlexRay、CAN のトランスポートレイヤー含む) を使用した AUTOSAR ECU の測定と適合
応用分野
MICROSAR パッケージに含まれるベーシックソフトウェアモジュールは、ECU の基本機能を提供しています。モジュールには、アプリケーションソ フトウェアに必要なAUTOSAR の標準サービスが実装されています。AUTOSAR アーキテクチャーは、ハードウェア抽象化という方針に一貫して 従っているので、ユーザーは機能ソフトウェアプラットフォームを自由に開発することができます。
MICROSAR.OS や MICROSAR MCAL パッケージに含まれるモジュールはハードウェア依存型です。これらのモジュールについてベクターで は、数多くのさまざまなハードウェアプラットフォームおよびコンパイラー用のモジュールを提供しているので、コントローラーデバイスの置換なども スピーディーに実施できます。オペレーティングシステムのMICROSAR.OS は、シングルコアにもマルチコアプロセッサーにも利用できます。ベク ターでは、自動車メーカーとの連携から得られる経験に基づき、診断モジュールをはじめとする自動車メーカー固有のベーシックソフトウェアモ ジュールや拡張機能を数多く提供しています。 必要なMICROSAR ベーシックソフトウェアモジュールはすべて、お客様のプロジェクト要件に基づいて設定でき、作成後、モジュールをアプリケー ションソフトウェアと統合することができます。このようにして、ECU ソフトウェア一式が完成します。機能ソフトウェアが AUTOSAR 対応ソフトウェ アコンポーネントで構成されている場合は、ランタイム環境 (RTE) が必要になります。MICROSAR.RTE は、ソフトウェアコンポーネント間の通信 や、ベーシックソフトウェアモジュールのデータやサービスへのアクセスを取り扱います。また、MICROSAR.RTE はイベントと情報のフロー全体を 制御するのに加え、情報交換の整合性を保証し、コア間またはメモリー保護領域のアクセス制御も行います。
ソフトウェアコンポーネントによるアーキテクチャーを持たない、すなわち RTE もない ECU プロジェクトは、ベクターの BRE (Basic Runtime Environment) によりオプションでサポートされます。BRE は設定可能なベーシックソフトウェアのスケジュール機能やクリティカルセクションを管 理する機能を提供するほか、通常はRTE が作成する、サービスレイヤーのベーシックソフトウェアモジュールのための型定義を作成するなどして 統合を容易にします。そのため、RTE を使用していない AUTOSAR 4 ベースのプロジェクトの構築作業が加速および簡素化します。 特徴 MICROSAR ベーシックソフトウェアモジュールの開発は、SPICE をベースとしたベクターの標準モジュール開発プロセスを基礎としています。 MICROSAR パッケージはいずれも以下の機能を提供しています。 > 優れたメモリー利用効率、短い実行時間 > 量産車に使用可能 > AUTOSAR Release 4.x および 3.x に対応 > ベーシックソフトウェアの設定で整合性を保てるよう支援、タイムリーなチェックも実施 > お客様独自のアプリケーションに合わせた高い拡張性と対応性 > お客様の開発プロセスに最適な形で統合
> ECU のテストおよび解析のための AUTOSAR モニター
> Configuration Variant はユーザーが選択可能 (Pre-Compile Time、Link-Time、Post-Build Time)
> マルチプルECU をサポート
> ソースコードでの提供 (オプション)
> MICROSAR Safe と共に用いれば、安全関連機能 (ISO 26262) に最適
量産車での使用 MICROSAR ベーシックソフトウェアモジュールはすでに量産プロジェクトで利用されています。MICROSAR には、標準組込ソフトウェア実装に関 するベクターの長年にわたる経験が生かされています。MICROSAR ソフトウェアモジュールに対しては、すべて納品前に、お客様アプリケーショ ン固有の条件 (ハードウェアプラットフォーム、コンパイラー、プロセッサーデバイス、自動車メーカー、RTE の有無など) に合わせて体系的な統合 テストを実施しています。ご要望に応じ、テスト対象をサードパーティー製のソフトウェアモジュール (MCAL ドライバーなど) にまで広げることも可 能です。 AUTOSAR Release 4.x および 3.x に対応 AUTOSAR 4.x と 3.x のどちらを使用するかに関わらず、お客様はベーシックソフトウェア全体を、ベクターという 1 つの供給元から調達できます。 プロジェクトを移行しても、AUTOSAR 4.x と 3.x の両方に共通する以下のような開発ワークフローを利用できます。
> 設定ツールのDaVinci Developer と DaVinci Configurator Pro は両方のリリースに対応しています。そのため、ツールを変更する必要
はありません。
> 異なるAUTOSAR リリースの MCAL ドライバーを、MICROSAR に組み込むことができます。
AUTOSAR 3 から 4 に移行する場合、ベクターはお客様が AUTOSAR 4.x 規格で変更されたインターフェイスに合わせてアプリケーションソフト ウェアを修正する際のサポートを行います。
MICROSAR には他にも、AUTOSAR 4.x で規定されている機能が、AUTOSAR 3.x 用ベーシックソフトウェアモジュールの拡張機能の形で多数 用意されているという強みがあります。たとえばマルチコアオペレーティングシステムのほか、J1939、XCP、Ethernet/IP などもすでに AUTOSAR 3.x でサポート可能となっています。MICROSAR.MOST バンドルはベクターがこの規格を補うために提供しているもので、 AUTOSAR 4.x および AUTOSAR 3.x と互換性があります。
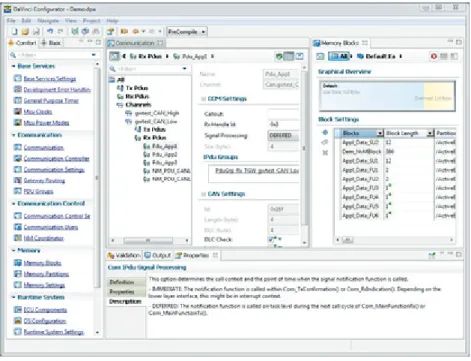
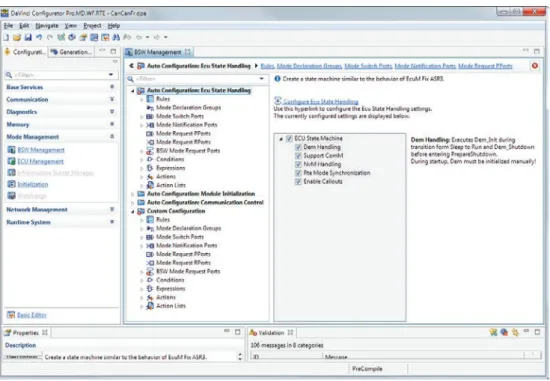
一貫性のあるシンプルな設定
AUTOSAR では、ECU ソフトウェア基本機能の開発や適合を手作業ではなく、ベーシックソフトウェアモジュールの設定で行うことになっています。 この設定作業では、直感的で使いやすいベクターのAUTOSAR ツール (DaVinci) が役に立ちます。DaVinci ツールのマルチユーザーサポート により、複数ユーザーで 1 つのプロジェクトを同時作業することが可能です。DaVinci ツールでは、入力に「ECU Extract of System Description」ファイルが必要です。一般に使用されているネットワーク記述ファイル (DBC、FIBEX、LDF など) をベースにして設定を作成するこ とも可能です。 設定プロセスの初期段階では、DaVinci の各ツールが個々のパラメーター、複雑なパラメーターグループ、またそれらの相互関係の妥当性を確 認します。不正な設定があった場合、可能であれば、ツールが修正を提案します。AUTOSAR 手法をこのように広く用いることで、ベーシックソフト ウェアのECU への統合が簡素化され、統合に要する時間が短縮できます。 DaVinci ツールは RTE とベーシックソフトウェアモジュールの最適な設定を支援します。たとえばボトムアップ方式のプロセスでは、BSW コンフィ ギュレーションに適合するソフトウェアコンポーネントのサービスポート (ランナブルを含む) が自動的に生成されます。このような自動処理により、 頻繁に発生し、手作業では間違いやすい作業から開発者が解放されて、時間とコストを節約できます。
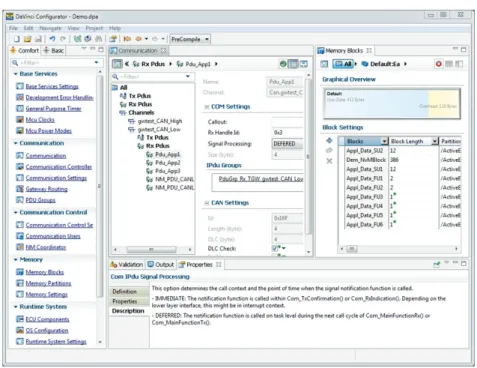
図2: DaVinci Configurator Pro でベーシックソフトウェアモジュールおよび RTE を設定 図3: 機能ソフトウェア (SWCs) は DaVinci Developer で定義 ベクターのDaVinci ツールについての詳細は、ベクターまでお問い合わせください。 スケーラビリティー MICROSAR ベーシックソフトウェアモジュールは AUTOSAR 要件を満たしているだけではなく、数多くの機能拡張も実現します。設定オプション を拡張することで、不要な機能を停止し、アプリケーションに合わせて MICROSAR コードを最適化することができます。このような拡張性がある MICROSAR モジュールは、小規模のアプリケーションにも複雑なアプリケーションにも最適なソリューションだと言えます。MICROSAR はすでに、 ステアリング角センサーやドアECU、エンジン ECU、セントラルゲートウェイといったさまざまな ECU で実装されています。また、MICROSAR は Linux や QNX などのほかのオペレーティングシステムで使用することも可能です。
AUTOSAR のモニターおよびデバッグ (AMD:AUTOSAR Monitoring and Debugging)
AMD パッケージは、重要なステータス情報や結果を CANape や CANoe.AMD などのツールに送信し、それによってベーシックソフトウェアや アプリケーション機能のテストと解析を簡素化します。また、AMD を使用して、ベーシックソフトウェアやアプリケーション機能の実行時間を測定す ることもできます。詳しくは、MICROSAR.AMD のセクションをご覧ください。 ユーザーが選択できるBSW 設定時点 すべての MICROSAR ベーシックソフトウェアモジュール用の設定時点はユーザーが選択することができます。各モジュールに関して、設定時点 としては、Pre-Compile、Link-Time、Post-Build から選択可能です。 ECU バリアントおよび BSW コンフィギュレーションのリロード
AUTOSAR ECU の物流コストを減らすため、MICROSAR モジュールには Identity Manager オプションが付属しています。このオプションを 使用すれば、複数のコンフィギュレーション (左右のドアなど) を 1 つの ECU に格納することが可能になります。それによって同一の ECU を 1 つ のシリーズのモデル内に、あるいは異なるシリーズのモデルに設置して、複数の機能を実現できます。
ベーシックソフトウェアの「Post-Build Loadable」オプションを使用すると、BSW コンフィギュレーションの多数のパラメーターを後から、ECU ソ フトウェアを再コンパイルせずに修正できます。たとえば、ECU のビルド環境がなくても、またサプライヤーに新しい ECU バリアントの作成を依頼 しなくても、ルーティングテーブルや送信タイプを修正したり、拡張したりできます。
詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください。 ISO 26262 に準拠した機能安全:MICROSAR Safe
MICROSAR ベーシックソフトウェアを安全関連機能に使用できるよう、ベクターは TTTech Automotive と協力して、AUTOSAR ECU のため のトータルなソリューションを提供しています。詳しくは、MICROSAR Safe の章をご覧ください。 製品に含まれるもの 以下のものが製品に同梱されています。 > ソフトウェアモジュール > コマンドラインベースのジェネレーター (Windows XP/Windows 7 用) > ベーシックソフトウェアモジュールディスクリプション > マニュアル類
追加または代替のコンポーネントを、モジュール別に以下に示します。設定には、快適に操作できるDaVinci Configurator Pro のご利用を推 奨します。詳しくは、ベクターまでお問い合わせください。 ソースコードの提供 (オプション) ご要望に応じて、MICROSAR モジュールをソースコードで提供することもできます。ソースコードの場合、プリコンパイルによる最適化やテストの 簡素化が可能です。 ライセンスおよび保守 ベクターは、お客様のご要望に合わせて個々にカスタマイズした柔軟なライセンスを提供します。保守契約の一環としてソフトウェアの更新を提供 し、常に最新レベルを保てるようにします。 その他のサービス > システム設計に関するコンサルティング
> ECU へのソフトウェア統合 (サードパーティー製ソフトウェアを含む)
> 既存ソフトウェアのAUTOSAR ベースコンセプトへの移行
> 組込ソフトウェアとAUTOSAR に関するホットラインサポート、トレーニングコース
ベクターのAUTOSAR ソリューション
ベクターの AUTOSAR ソリューションは、DaVinci ツール、MICROSAR ベーシックソフトウェア、MICROSAR.RTE から構成されています。 MICROSAR パッケージに含まれるベーシックソフトウェアモジュールの一般的な特性については、以下の章で説明します。各 DaVinci ツールの 機能的な特性については、それぞれのプロダクトインフォメーションをご覧ください。 お問い合わせ MICROSAR ベーシックソフトウェアモジュールは、一般に広く使用されている各種マイクロコントローラーや、自動車メーカー固有のバリアントでも 使用できます。 詳しい情報は、ベクター ([email protected]) までお問い合わせください。 お問い合わせ先についてはwww.vector.com/contactをご覧ください。 トレーニング ベクターでは、AUTOSAR に関するトレーニングを開催しております。また、規模やご要望に応じて、お客様ご指定の場所でのオンサイトトレーニ ングも実施しております。 ベクターのトレーニングについての詳細は、Web サイトにてご覧ください。 (jp.vector.com/vj_training_schedule_jp.html)
MICROSAR.OS – AUTOSAR 仕様に対応したリアルタイムオペレーティングシステム
MICROSAR OS は、マイコン上での利用を目的として設計された、プリエンプティブなリアルタイムマルチタスクオペレーティングシステムです。各 種マイコン用OS およびドライバーの開発におけるベクターの長年の経験を生かし、コンパクトで堅牢な OS コアを実現しました。 図4: AUTOSAR 4.2 対応の MICROSAR OS モジュール 機能概要 > 小型かつ高速でリソース効率に優れ、起動時間も短いオペレーティングシステム > MICROSAR.OS は AUTOSAR 4.x および 3.x に対応 > オプション:マルチコアオペレーティングシステムに対応 > オプション:ISO26262/ASIL-D に準拠した安全なコンテキスト切替え > SPICE レベル 3 の品質プロセス > 設定が簡単に行えるグラフィカルな設定ツール > 8 ビット、16 ビット、32 ビットおよび 64 ビットなど、多くのマイコンに使用可能 特徴MICROSAR OS は、実績のある OSEK/VDX-OS オペレーティングシステム標準を拡張した、AUTOSAR OS 仕様に基づいています。この標 準をもとに、時間監視、メモリー保護、ネットワークの分散アプリケーションをサポートするための機能が追加されています。たとえば、実装されてい るHigh Resolution Timer メカニズムを利用することで、割込み負荷を上げることなく 1ms よりも短い時間分解能が可能になります。コントロー
> SC3:マイコンのハードウェア機能を利用したメモリー保護機能を持つ、リアルタイムオペレーティングシステム > SC4:SC2 と SC3 を組み合わせた内容 オプションの拡張機能 グローバルシステムタイムへの同期 スケジュールテーブルは、グローバルシステムタイム (FlexRay バスを介して送信された時間など) に同期させることができます。これによって、分 散システム内でのタスクの同期や同時実行が可能です。 メモリー保護 (SC3、SC4) メモリー領域を保護することにより、他のアプリケーションのデータを破壊することなく、より簡単、確実にアプリケーションを統合することができます。 タイミング保護 (SC2、SC4) タイミング保護により、初期設計段階で想定された実行時間の上限を、実行時にも、超過のモニターという形で保証することができます。その結果、 あるアプリケーションセクションに不具合が生じたときに、他の実行中のプロセスにおける実行時間に悪影響を及ぼさないようにします。 実行時間の測定 (SC2、SC4) スケーラビリティークラスSC2 および SC4 の機能を使用して、アプリケーションの実行時間と割込み禁止時間を測定することが可能です。測定し たデータは、後日、将来のアプリケーションを設計して統合する際に、実際の測定値として活用することができます。 ISO 26262 に準拠したアプリケーションのためのオペレーティングシステム ISO 26262 に準拠した安全関連のアプリケーション向けに、ASIL D に即して開発されたベクターのオペレーティングシステムのバリアント、 MICROSAR.OS SafeContext が用意されています。これは AUTOSAR の Scalability Class のうち SC3 と SC4 に基づいており、メモリー 保護と安全なコンテキスト切替えを担当します。メモリー保護における「Freedom from interference (無干渉)」を維持するには、メモリー保護ユ ニット (MPU) などを備えた適切なプロセッサーが必要です。
MICROSAR.OS SafeContext は、同じ CPU 上で安全関連アプリケーションのコンポーネントと標準のコンポーネントを併用する場合に使用で きます。 MICROSAR.OS SafeContext に含まれるもの: > OS コアのソースコード > Windows 7/Windows XP 用のグラフィカルな設定ツール > コマンドラインベースのジェネレーター > ベーシックソフトウェアモジュールディスクリプション
> DaVinci Configurator Pro 用ディスクリプションファイル
> マニュアル類
> リードバックツール
> 安全マニュアル
ベクターの安全関連ソリューションについて詳しくは、MICROSAR Safe の章を別途ご覧ください。 マルチコアオペレーティングシステム
MICROSAR.OS Multi-Core は、ベクターの実績あるリアルタイムオペレーティングシステム、MICROSAR.OS の高度な発展形です。 AUTOSAR 仕様に従ってマルチコアシステムを開発するのであれば、いつでもこれを使用できます。MICROSAR.OS Multi-Core は AUTOSAR 仕様 4.x に基づいていますが、AUTOSAR 3.x のプロジェクトにも使用できます。
マルチコアオペレーティングシステムの機能
マルチコアオペレーティングシステムでは、複数のプロセッサーコアのそれぞれに個別の AUTOSAR オペレーティングシステムのインスタンスを ロードし、それらを並行に、しかも独立して動作させることが可能です。したがって、そのコンフィギュレーションとシステムサービスは、シングルコア のオペレーティングシステムのものと一致し、SC2 から SC4 に対応する拡張機能と、High Resolution Timer 機能が利用できます。 MICROSAR.OS Multi-Core はさらに、異なるコア上で実行されているタスクを制御および同期するメカニズムも備えています。 2.5.1.1 起動の同期 オペレーティングシステムは、関連付けられているアプリケーションが起動する前に、すべてのコアを起動し、初期化することを保証します。 2.5.1.2 コア間の調停 異なるコア上のプロセスは、タスクのアクティベーション、イベントの設定、アラームの開始と停止、スケジュールテーブルのいずれかによって同期 されます。 2.5.1.3 共有リソースへのアクセス 共有されるリソースに異なるコアがアクセスする場合に備えて、オペレーティングシステムにはスピンロックという調停のメカニズムが用意されてい ます。 2.5.1.4 コア間通信
2 コア間でのデータ交換の整合性を保つため、オペレーティングシステムは Inter-OS Application Communicator (IOC) の形で効率的なイ ンターフェイスを提供します。
グラフィカルな設定および生成ツール
設定には、快適に操作できるDaVinci Configurator Pro のご利用を推奨します。これには、整合性チェックとジェネレーター呼出機能が装備さ れています。ジェネレーターはコマンドラインツールとして実装されており、自動開発環境への統合が可能となっています。
製品に含まれるもの
MICROSAR.OS には、以下のものが含まれます。
> OS コアのソースコード
> グラフィック設定/生成ツール (Windows XP/7 対応)
> Basic editor として DaVinci Configurator Base
> コマンドラインベースのジェネレーター
> ベーシックソフトウェアモジュールディスクリプション
MICROSAR.COM – 通信用 AUTOSAR ベーシックソフトウェアモジュール
MICROSAR COM のベーシックソフトウェアモジュールには、ECU 通信用の AUTOSAR サービスが含まれています。これらのサービスは、通 信チャンネルをいくつでもサポートできるようになっています。バスの種類に依存せず、あらゆる通信スタックで必要とされるサービスです。 AUTOSAR アーキテクチャーに基づき、CAN、CAN-FD、J1939、FR、LIN、ETH.といった、バス固有の通信モジュールの ECU ソフトウェアの 制御と完全統合を担っています。
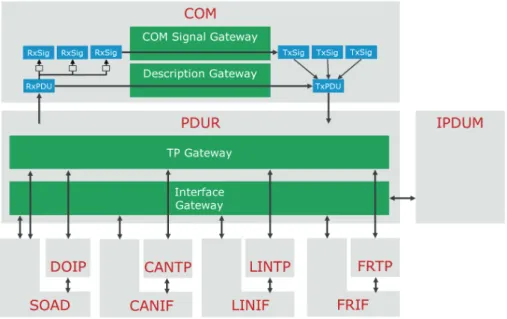
図5: AUTOSAR 4.2 対応の MICROSAR COM モジュール
機能概要 > アプリケーションに合った設定でコードや実行時間を最適化 > AUTOSAR Release 4.x および 3.x に対応 > AUTOSAR 仕様の枠を越えた便利な拡張機能を多数搭載 (「機能」の章を参照) > NM コーディネーターに関するサポートを拡張 (「機能」の章を参照) > NM モジュール:OSEK NM との互換性は設定可能 > NM 移行プロジェクトにおける AUTOSAR NM および OSEK NM の同時運用をサポート > 関数マクロによりシグナルアクセスの効率を向上 (AUTOSAR 3 対応) 応用分野 MICROSAR COM を使用することで、バスに全く依存しない手法で機能ソフトウェアを開発することができます。メッセージ送信やバス間ネット ワークの管理業務で必要なタスクはすべて、MICROSAR COM に含まれているベーシックソフトウェアモジュールの COM、NM、PDUR、 IPDUM によって処理されます (モジュールは設定可能)。
機能
MICROSAR COM のベーシックソフトウェアモジュールには AUTOSAR 4.x で定義されている機能が含まれています。
> COM モジュールのサービスは、メッセージの送信タイプ (サイクリック、イベントトリガーなど) に基づき、メッセージ送信を管理します。主なタ
スクは、バスに依存しないアプリケーションシグナルをPDU に実装することです。
> PDU Router (PDUR) は PDU をバス固有の AUTOSAR 通信モジュールに配信し、モジュールが情報を送信できるようにします。逆方向
においては、PDUR は PDU を受信すると、その PDU を NM、COM、DCM いずれかのモジュールの該当サービスへ、あるいは別のネッ トワーク (ゲートウェイ) へとルーティングします。MICROSAR モジュールの CDD により、TP および IF PDU を以下のように COM スタッ クに統合できます。
> PDU Router の上または下
> 通信インターフェイスの上
> Network Management Interface (NM) は、ECU の通信チャンネルすべてのバス間ネットワーク管理機能を提供します。また、NM
コーディネーターとして、通信チャンネルのウェイクアップとスリープの同期を実行します。
> オプションとして、ECU ソフトウェアの通信スタックで IPDUM (I-PDU Multiplexer) を使用することもできます。IPDUM は、フレームに対し
てデータの割付を多重化し、複数の用途で使用できるようにします。これは従来のバスシステムの場合は静的なコンフィギュレーションを通じ て、あるいはCAN-FD の場合は動的なデータコンテンツのマッピングを通じて行われます。
> トランスフォーマー:複雑なデータ構造とサイズの大きいPDU をネットワーク上で効率的に伝送できるようにします。
> COMXF:多数のシグナルから構成された効率的なシグナルグループを使用できます。配置は Extract of System Description から導
出されます。
> SOMEIPXF:さまざまなデータタイプに応じたシリアル化の手順を提供します。LDCOM を使用することにより、効率のよい伝送が可能に
なります。
> E2EXF:AUTOSAR のトランスフォーマーのコンセプト (COMXF または SOMEIPXF によるシリアル化) を使用して管理されるネット
ワーク通信を、エンドツーエンドで保護します。
> SecOC:SecOC (Secured OnBoard Communication) について詳しくは、「MICROSAR.Security」の章を参照してください。
MICROSAR.COM のベーシックソフトウェアモジュールには他に、以下の機能も備わっています。
> COM:Rx 信号タイムアウト時の TX 信号の無効宣言
> COM:main 関数の実行時間を短縮するための最適化 (Rx 側:受信イベントのキャッシング、Tx 側:複数の時間ドメインの設定)
> COM:Rx IPDU の遅延イベントキャッシング。これは Rx PDU のイベントトリガー処理による、Rx main 関数の実行時間の最適化です。こ
の最適化により、main 関数の Rx ですべての PDU を周期的にポーリングせずに済みます。
> COM、PDUR と IPDUM:プリコンパイルおよび Post-build loadable による最適化 (余剰データの検出および除去など)
> NM:複数の異なる NM コーディネーターによる、複数ネットワークのスリープとウェイクアップの同期 > NM:バックアップコーディネーター 下記の機能はオプションで提供可能です。 > COM:PDU の複製 (AUTOSAR 4.x 対応) > COM:COM モジュールへのゲートウェイ機能の付与。シグナルおよびシグナルグループのルーティングが可能です。COM でのルーティン グは、実際のシグナルやシグナルグループが存在しなくても、設定記述により実現できます。 > NM:設定可能な OSEK NM への対応
> 範囲指定ルーティングの場合のメタデータによるルーティング
> 可変アドレスのルーティング (「動的ゲートウェイ」)
> PDU 長が動的な場合のルーティング
> Post-build loadable および Post-build selectable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください。
> ゲートウェイミラーリング:内部バスを診断用のチャンネルにミラーリングできます。これにより、通常はアクセスできないバス上のメッセージを 読み込み、問題を特定することができます。基本バージョンの場合、この機能では1 つの内部 CAN または LIN チャンネルを診断用の CAN にミラーリングできます。オプションの拡張機能により、以下が可能になります。 > 複数のCAN、LIN、FR、ETH チャンネルの診断用 ETH へのミラーリング > CAN、LIN、FR チャンネルの診断用 CAN または FR へのミラーリング > ハイエンド機能:このオプションにより、以下の機能がCOM モジュールで有効になります。
> Description based routing : このオプションにより、転送モード(periodic, event triggered, on changes)を含んだ PDU セグメントの
ルーティングが可能になります。(スタートビットとデータ長で定義されます) これにより、シグナルベースのルーティングやサイクル遅延によ るPDU ルーティングに替わる、極めて効率のよいルーティングが実現します。この機能には、先に述べたゲートウェイオプションが必要で す。
設定
設定には、簡単で便利なツール DaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。DaVinci Configurator Pro を使用すれば、MICROSAR.COM モジュールの PDUR と、CANIF、LINIF、FRIF、ETHIF (SOAD) の各モジュールを、設 定を使用してお客様自身のコンプレックスドライバーに簡単にリンクできます。
MICROSAR Gateway – ゲートウェイ ECU 用のベーシックソフトウェア
ゲートウェイ ECU は、車両のネットワークアーキテクチャーの中心となるノード点です。そしてそのアーキテクチャーは多くの場合、異なる複数の 通信ネットワークから構成されています。ここでのゲートウェイの役割は、さまざまなネットワークを相互に接続し、分散した、しかも種類の異なる ネットワーク上に存在するECU 間のデータ転送を可能にすることです。ゲートウェイの性能には、データスループットの高さとリソース負荷 (特に RAM と CPU の使用率) の低さという相反する特性から、伝送時のレイテンシーの低さに至るまで、幅広い指標があります。 ベクターは、異なるプロトコルレベルや別の種類のバスシステム (CAN、LIN、FlexRay、Ethernet) へのルーティングを可能にする、ゲートウェイ 用に最適化されたモジュールを提供しています。MICROSAR Gateway はそのような基本機能をベースに、サブネットワークのミラーリングや、 既存の機能を拡張するモジュールのプラグインなど、数々の専用機能を装備しています。この基本機能、専用機能、拡張性という 3 段階のアプ ローチにより、MICROSAR Gateway はそれぞれのアプリケーション事例に柔軟に対応することができます。 ゲートウェイのパフォーマンスを最適化するために、MICROSAR Gateway の一定の部分は、独立したアーキテクチャーに準拠しています。それ らの箇所はAUTOSAR Architecture Conformity Class 2 (ICC2) の要求を満たしているため、AUTOSAR のソフトウェアコンポーネントの組 込が可能となっています。 図7: MICROSAR のマルチレイヤーゲートウェイ MICROSAR Gateway の機能概要: > 異なるプロトコルレベルでのルーティング (PDU、上位 TP、PDU セクション、シグナル) > 異なる種類のネットワーク間のルーティング (CAN、LIN、FlexRay、Ethernet) > 各種バッファーの柔軟な設定 (Rx FIFO キュー、Tx FIFO キュー、プライオリティーキュー) > 各種処理の柔軟な設定 (割り込み、タスク) > ルーティング関係をビルド後に読み込むことのできる、柔軟なポストビルドのアプローチ > 診断用チャンネルへのサブネットワークのミラーリング (CAN および Ethernet) > NM コーディネーターに関するサポートの拡張 > 入力データ (.dbc、.ldf、.fibex、.arxml 形式およびプロプライエタリの形式) を自動処理するためのツールチェーン > ツールチェーンの拡張 (スクリプト、拡張機能) およびベーシックソフトウェアの拡張 (CDD のサポート) を目的とした定義済みインターフェイス応用分野
MICROSAR Gateway では、データを最適なプロトコルレベルで、CAN、LIN、FlexRay、Ethernet などのネットワークにルーティングするのに 必要なベーシックソフトウェアが提供されます。このような柔軟なアプローチを通じ、MICROSAR Gateway は以下の開発に使用できます。 > ローカルゲートウェイ (ドアエリアなど) > ドメインコントローラー (ボディコントローラーなど) > セントラルゲートウェイ (セントラルダイアグアクセス、通信アプリケーション用など) 機能 > 異なるプロトコルレベルでのルーティング > PDU ルーティング (インターフェイスレベル): > メッセージおよびPDU レベルでの効率的なイベントベースのルーティング > 各種のバッファー戦略のサポート (Last-is-best、FIFO、プライオリティーベース) > 「コンテナ内PDU」(SOAD および IPDUM) のルーティング > サポートされるネットワーク:Ethernet、CAN、LIN、FlexRay > 上位TP ルーティング > 異なる転送プロトコル間のルーティング > 時間ベースのフロー制御および帯域幅管理による伝送のセグメント化 > 専用のバッファー処理:「オンザフライルーティング」、「要求キュー」、「バッファー共有」 > サポートされるネットワーク:Ethernet、CAN、LIN、FlexRay > PDU セクションルーティング (記述ベースのルーティング) > スタートビット、ターゲットビット、および長さで定義される、PDU 内のデータセクションの効率的なルーティング > 制御下でのTx の動作 (周期的な送信、データ変更時の送信、タイムアウトへの反応、最小 Tx 間隔など) > サポートされるネットワーク:ネットワークに依存しないルーティング > シグナルベースルーティング > 圧縮解除されたデータシグナルのルーティング > 制御下でのTx の動作 (周期的な送信、データ変更時の送信、タイムアウトへの反応、最小 Tx 間隔など) > 変換を実行するためのオプション (エンディアン、シグナル長、シグナルの内容) > サポートされるネットワーク:ネットワークに依存しないルーティング
図8: 異なるプロトコルレベルでのルーティング
> 拡張可能なベーシックソフトウェア (プラグインアーキテクチャー)
> ユーザー独自のソフトウェアをデータフローに効率的に統合 (AUTOSAR 準拠の Complex Device Driver (CDD) で実装)
> 設定ツールでのCDD の設定 > CDD をベーシックソフトウェアに統合するためのテンプレートの生成 > >CDD はインターフェイス上位、PDU ルーター下位、PDU ルーター上位に統合可能 > 独自ソフトウェアを制御フローに統合するためのコールアウト (多くの場合はデータに影響を及ぼすオプションも含まれます) > ゲートウェイの最適化 > 遅延イベントキャッシング:COM レベルでの Rx イベントの効率的な処理 > タイミングドメイン:COM レベルでの Tx イベントの効率的な処理 > 記述ベースのルーティング:データセクションの効率的なルーティング > 動的ルーティング > 診断ルーティングの学習:診断応答の受信などから学習したECU の位置に基づく診断要求のルーティング
> AUTOSAR のメタデータ機能を使用して CAN ID の一部をルーティングするなど、CAN ID に基づくルーティング
> ミラーリング
> 内部CAN または LIN チャンネルの診断用 CAN へのミラーリング
> 複数のCAN/LIN ネットワークと、1 つの FlexRay (A+B チャンネル) ネットワークの診断用 Ethernet へのミラーリング
> NM のコーディネーション
> ビルド後:ECU 全体をリプログラムせずにゲートウェイ設定を更新可能。ビルド後の動作についての詳細は、「MICROSAR バリアントハンド
設定
ゲートウェイには、多岐にわたる設定が必要になることが少なくありません。そのため、ベーシックソフトウェアを自動車メーカーから提供された入 力データに従い、自動的にパラメーター化できることが特に重要になります。ベクターの設定ツール、DaVinci Configurator Pro は、以下のよう な多様な方法による自動的なパラメーター化をサポートします。
> AUTOSAR System Extract (.arxml) による設定:AUTOSAR で定義されたデータ形式では、ルーティング情報の明示的な指定が可能で
す。この情報をDaVinci Configurator Pro に読み込み、ソフトウェアの設定に変換します。
> ネットワークファイルの拡張による設定:一般にプロプライエタリのネットワークファイル (.dbc/.ldf/.fibex) には、ルーティング情報をネイティ
ブで指定する機能がありません。ただし、DaVinci Configurator Pro では、各種の補助的な属性を解釈したり、規則を評価 (シグナルの命 名に同じものがないかなど) するなどして、ルーティング情報を導出することが可能です。
> プロプライエタリデータ (.xls など) による設定:ベクターのツールチェーンには、ファイルを別途追加してルーティング情報を定義するオプショ
ンも用意されています。このファイルを用いて、ベクター指定のXML 形式 (VSDE:Vector System Description Extension) のネットワー クファイルに記録されているメッセージとシグナルの関係を定義できるため、ルーティング関係の指定が可能になります。VSDE ファイルはプ ロプライエタリのルーティング設定をツールチェーンに統合するのに特に適しています。これには,プロプライエタリファイルを VSDE ファイル に転送する、プロプライエタリ変換ルーチンの実装が必要です。
> スクリプト機能:上記の方法をスクリプトソリューションと組み合わせることもできます。DaVinci Configurator Pro のオプション WF
(Workflow) を使用すれば、自分のプロジェクト専用のスクリプトを作成し、プログラミングでそれを使用して、ルーティング情報を補うことが できます。
これらの方法で生成されるソフトウェア設定は、その 1 回のプロセスでしか使用できないものではありません。入力ファイルのネットワーク記述が 変更された場合、ソフトウェア設定を自動的に更新させることができます。
図9: DaVinci Configurator Pro でゲートウェイ用ベーシックソフトウェアを自動設定するためのオプション
DaVinci Configurator Pro では、設定を自動導出するだけでなく、すべてのパラメーターを手動で処理することもできます。詳しくは、ベクターま でお問い合わせください。
プロジェクトのサポート ゲートウェイ ECU の場合、それに対する要求が自動車メーカーだけでなく、アプリケーションでも固有であるケースがとりわけ多く、通常の製品で それらに完全に対応することは一般に不可能です。しかし、ベクターは次の 2 段階のアプローチを通じ、お客様のプロジェクトにおけるこれらの要 求に効率的に対応します。 > まず、MICROSAR Gateway はプラグインアーキテクチャーの形で数多くの拡張機能をサポートします。これを使用することにより、お客様 での独自開発ソフトウェアや、サードパーティーのサプライヤーから調達したソフトウェアを統合できます。 > これらのインターフェイスを基盤とするオプションの1 つとして、ベクターがお客様と共同し、プロジェクトの要求に対処するサービスも用意さ れています。これにより、リリースサイクルに拘束される製品からのアプローチよりも、顧客要求をはるかに柔軟に実装することが可能になり ます。共同プロジェクトの一環として、顧客要求の充足に必要となる弊社製品の拡張の実装も承ります。 図10: 最適な開発サポートのための 3 階層のアプローチ
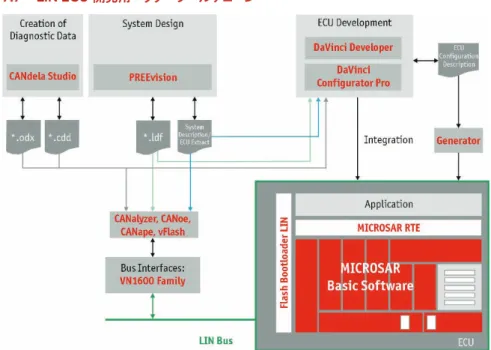
MICROSAR.CAN – CAN 通信用 AUTOSAR ベーシックソフトウェアモジュール
MICROSAR.CAN パッケージには、AUTOSAR アーキテクチャーに CAN 通信用に定義されているベーシックソフトウェアモジュール CANIF、 CANNM、CANTP、CANSM が含まれており、オプションで J1939 や XCP 用モジュールもあります
図11: AUTOSAR 4.2 対応の MICROSAR CAN モジュール
機能概要 > AUTOSAR Release 4.x および 3.x に対応 > 便利な拡張機能を多数搭載 > ニーズに合わせた設定に基づき、コードおよび実行時間を最適化 > すべての通信固有のソフトウェアモジュールについて、モジュール間設定が可能 > ECU スタートアップ時の高速ウェイクアップ処理 > CANTP:ISO 15765-2 への対応は設定可能
> CANNM と OSEK NM の互換性:OSEK NM は設定可能なモジュールとして利用可能
> CANNM、CANSM:パーシャルネットワークの状態に応じた通信スタックの制御 (オン/オフ)
> CAN-FD:帯域幅の拡張により最大 64 バイトのデータをサポートし、多数の CAN-FD コントローラーに対応
応用分野
MICROSAR.CAN は、CAN ネットワーク通信処理に使用されます。また、XCP でのキャリブレーション、ゲートウェイ、フラッシングの基盤として も適しています。MICROSAR.CAN は、別途入手可能な MICROSAR J1939TP パッケージと組み合わせて使用することで、J1939 ネットワー クでAUTOSAR ECU を操作することもできます。その場合、BAM および CMDT トランスポートプロトコルの使用が可能です。
機能
MICROSAR.CAN のベーシックソフトウェアモジュールには AUTOSAR 4.x で定義されている機能が含まれています。MICROSAR.CAN には 以下の機能があります。
> CANIF:ダブルハッシュ検索アルゴリズムで受信メッセージをフィルタリング
> CANNM、CANTP:プリコンパイルによる最適化 (シングルチャンネルシステムの場合など)
> CANSM:ECU パッシブモードのサポート
> CANTP:アドレッシングの混在をサポート (11bit の CAN ID)、主に CAN/LIN ゲートウェイアプリケーション用
> CANTP:MICORSAR.COM に含まれる PDUR と協調して、ASR 4.0 に対応したルーティングの最適化 (バースト伝送など)
> CANTP:ISO 15765-2 への対応は設定可能
> CANTSYN:Time Synchronization over CAN (CANTSYN) は、IEEE 802.1AS に準拠した Generalized Precision Time Protocol
(gPTP) を実装します。これによって CAN ECU 間のクロック同期が可能になります。高レベルの時間コーディネーターには MICROSAR.SYS の Synchronized Time-Base Manager (STBM) ベーシックソフトウェアモジュールを利用できます。 以下の機能はオプションで提供可能です。
> J1939:Network Manager (J1939NM)、Request Manager (J1939RM)、診断モジュール (J1939DCM)、J1939 ネットワークに対
応したBAM および CMDT プロトコル (J1939TP)
> CAN ドライバー:複数の CAN コントローラーを 1 つの物理 CAN バス (共通 CAN) 上にまとめることによる Full-CAN オブジェクト数の拡大
> CANIF:外部 CAN コントローラーのサポート
> Post-build loadable および Post-build selectable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください。
設定
設定には、簡単で便利なツールDaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。 その他のCAN 通信スタック用 MICROSAR 製品
AUTOSAR アーキテクチャーに基づき、CAN 用の完全な通信スタックは、MICROSAR.CAN および別途入手可能な MICROSAR.COM、 MICROSAR.MCAL、MICROSAR.EXT の各パッケージのベーシックソフトウェアモジュールで構築されています。MICROSAR.CAN をアプリ ケーションやハードウェアと接続させるには、以下のベーシックソフトウェアモジュールも必要です。
> MICROSAR.MCAL のハードウェア固有 CAN ドライバー (CANDRV)
> MICROSAR.EXT のハードウェア固有トランシーバー制御 (CANTRCV)、パーシャルネットワーキングにも使用可能 > MICROSAR.COM の汎用通信モジュール (COM、NM、PDUR、IPDUM) MICROSAR.MCAL および MICROSAR.EXT のモジュールは、各種マイクロコントローラーやトランシーバーに対応しています。 その他のCAN 用 MICROSAR 関連製品 > MICROSAR.DIAG の DCM および DEM > MICROSAR.SYS の DET、ECUM、COMM
> MICROSAR.XCP により、ASAM XCP に準拠した測定とキャリブレーションが可能になります。モジュールは CANoe.XCP および
CANoe.AMD に加え、CANape との併用に特化して最適化されています。CAN ECU 用として、MICROSAR.XCP には適切な CANXCP トランスポートレイヤーが含まれています。
> VX1000If モジュールを使用すると、測定およびキャリブレーションハードウェアである VX1000 のドライバーを量産時に無効化できます。検 査や開発の際は、API を通じてこの VX1000 ドライバーを再び有効化できます。量産品で使用する場合は、納入時にこのモジュールを MICROSAR SIP に含めて、承認を受けてください。ただし、VX1000If 使用時は、量産プロジェクトでもランタイム中に VX1000 ドライバー の有効化はできません。
> 商用車におけるJ1939 ECU について詳しくは、「MICROSAR.J1939」のセクションをご覧ください。
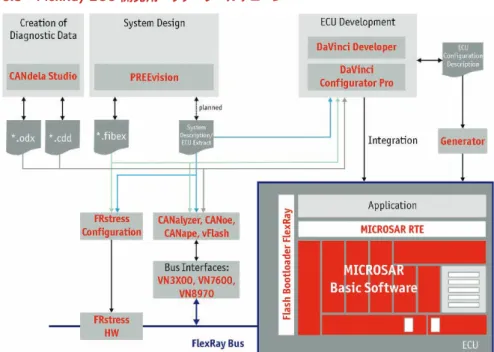
CAN ECU 開発用ベクターツールチェーン
MICROSAR.FR – FlexRay 通信用 AUTOSAR ベーシックソフトウェアモジュール
ベクターでは、AUTOSAR 対応の FlexRay 通信用パッケージ MICROSAR.FR を提供しています。パッケージには、AUTOSAR アーキテク チャーに定義されているベーシックソフトウェアモジュールのFRIF、FRNM、FRSM が含まれており、また、FRTP か FRISOTP のどちらかを選 択できます。MICROSAR.FR はオプションとして XCP での拡張も可能です。 図13: AUTOSAR 4.x 対応の MICROSAR.FlexRay モジュール 機能概要 > AUTOSAR Release 4.x および 3.x に対応 > パーシャルネットワークの状態に応じてパーシャルネットワークを有効/無効にし、データを提供 > FlexRay インターフェイスのジョブリスト管理を最適化し、コードサイズを縮小、実行時間を短縮
> FRTP (AUTOSAR) または FRISOTP (ISO 10681) どちらかのトランスポートプロトコルを使用可能
> FlexRay State Manager で ECU パッシブモードをサポート
> 同期ずれを早期検出
応用分野
MICROSAR FR は、パーシャルネットワークを含む FlexRay ネットワーク通信の処理に使用されます。また、XCP でのキャリブレーション、ゲー トウェイ、フラッシングの基盤としても適しています。
機能
MICROSAR.FR のベーシックソフトウェアモジュールには AUTOSAR 4.x で定義されている機能が含まれており、AUTOSAR 3.x を補足するも のとしてFRISOTP が提供されています。また、MICROSAR.FR は以下のサービスも提供しています。
> FRDRV:最適化された Wakeup During Operation Pattern (WUDOP)
> FRDRV および FRIF:CancelTransmit および L-PdU 再設定 API のサポート
> FRIF:冗長フレームを送信するためのチャネルの二重化と、ソフトウェアコンポーネントに対する PDU 固有の多数決判定機能
> FRDRV、FRIF、FRNM、FRTP:プリコンパイルによる最適化 (シングルチャンネルシステムの場合など)
> FRSM:ECU パッシブモードのサポート、パッシブウェイクアップ後の即時起動、State Change Notification によるエラー処理の拡張、
パッシブウェイクアップ時のFlexRay 起動待機時間の設定が可能、ウェイクアップパターン数の設定が可能
> FRTSYN:Time Synchronization over FlexRay (FRTSYN) は、IEEE 802.1AS に準拠した Generalized Precision Time Protocol
(gPTP) を実装します。これによって FR ECU 間のクロック同期が可能になります。高レベルの時間コーディネーターには MICROSAR.SYS のSynchronized Time-Base Manager (STBM) ベーシックソフトウェアモジュールを利用できます。
以下の機能はオプションで提供可能です。
> Post-build loadable および Post-build selectable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください。
オペレーティングシステム
FlexRay のベーシックソフトウェアモジュールは、オペレーティングシステムがなくても問題なく使用することができます。ただし、AUTOSAR OS ま たは従来のOSEK-OS (ベクターの osCAN など) の使用を推奨します。ベクターの MICROSAR.OS は、FlexRay アプリケーションに最適です。
設定
設定には、簡単で便利なツールDaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。 その他のFlexRay 通信スタック用 MICROSAR 製品
AUTOSAR アーキテクチャーに基づいた FlexRay 用通信スタックは、MICROSAR.FR および別途入手可能な MICROSAR.COM、 MICROSAR.MCAL、MICROSAR.SYS、MICROSAR.EXT の各パッケージのベーシックソフトウェアモジュールで構築されています。 MICROSAR.FR をアプリケーションやハードウェアと接続させるには、以下のベーシックソフトウェアモジュールも必要です。 > MICROSAR.MCAL のハードウェア固有 FlexRay ドライバー (FRDRV) > MICROSAR.EXT のハードウェア固有トランシーバー制御 (FRTRCV) > MICROSAR.COM の汎用通信モジュール (COM、NM、PDUR、IPDUM) MICROSAR.MCAL および MICROSAR.EXT のモジュールは、各種マイクロコントローラーやトランシーバーに対応しています。 その他のFlexRay 用 MICROSAR 製品 > MICROSAR.DIAG の DCM および DEM > MICROSAR.SYS の DET、ECUM、COMM
> MICROSAR.XCP により、ASAM XCP に準拠した測定とキャリブレーションが可能になります。MICROSAR.XCP は CANoe.XCP およ
びCANoe.AMD に加え、CANape との併用に特化して最適化されています。FlexRay ECU 用として、MICROSAR.XCP には関連する FRXCP トランスポートレイヤーが含まれています。
> MICROSAR.XCP は AUTOSAR 仕様の枠を超えて、測定オブジェクトの汎用的な読出をサポートします。そのため、a2l ファイルでのアドレ
スの定義や更新は不要です。あらゆるバージョンおよびバリアントからのデータを、MCU ビルドから独立して、a2l ファイルを用いて抽出でき ます。汎用読出機能の使用には、XCP ツールとして CANoe.AMD または CANape を使用する必要があります。
> VX1000If モジュールを使用すると、測定およびキャリブレーションハードウェアである VX1000 のドライバーを量産時に無効化できます。検 査や開発の際は、API を通じてこの VX1000 ドライバーを再び有効化できます。量産品で使用する場合は、納入時にこのモジュールを MICROSAR SIP に含めて、承認を受けてください。ただし、VX1000If 使用時は、量産プロジェクトでもランタイム中に VX1000 ドライバー の有効化はできません。
FlexRay ECU 開発用ベクターツールチェーン
MICROSAR.LIN – LIN 通信用 AUTOSAR ベーシックソフトウェアモジュール
MICROSAR.LIN には、AUTOSAR アーキテクチャーに定義されている LIN 通信用のベーシックソフトウェアモジュール LINIF、LINSM、 LINNM が含まれています。AUTOSAR に基づき、LINTP は LINIF の 1 コンポーネントになっています。LIN 通信スタックの中にはトランスポー トプロトコルを必要としないものもあるため、LIN トランスポートプロトコルはオプションとして提供されています。MICROSAR.LIN Master 用の XCP も、ASAM 拡張機能として用意されています。 図15: AUTOSAR 4.2 対応の MICROSAR.LIN モジュール 機能概要 > AUTOSAR Release 4.x および 3.x に対応 > 便利な拡張機能を多数搭載 > マルチチャンネルのマスターに対するスケジューリングのジッターを最小化 > 診断要求のLIN スレーブへのルーティングを最適化 > LIN チャンネルのクイックスタート > スケジュールテーブルの切替えに高い信頼性を実現 > LIN ソフトウェア開発に関するベクターの長年の経験を活用 応用分野
MICROSAR LIN は、LIN ネットワークにおける LIN マスターの通信タスクを処理するのに使用されます。また、ゲートウェイやフラッシングの基 盤としても使うことができます。
機能
MICROSAR.LIN のベーシックソフトウェアモジュールには、AUTOSAR 4.x で定義されている機能が含まれています。 また、MICROSAR.LIN のベーシックソフトウェアモジュールは以下のサービスも提供しています。
> LINIF:設定可能なウェイクアップ遅延
> LINIF および LINTP:LINIF および LINTP の設定データのメモリーマッピングの個別設定が可能。これは、セグメント化したメモリーがある
コントローラーにとっては特に有効な機能です。この機能用として、MICROSAR.LIN 製品には LINIF 用と LINTP 用の 2 つの別々のジェネ レーターが搭載されています。 > LINIF/LINSM:スケジュールテーブル終了の通知 > LINIF:マルチチャンネルシステムでのタスクの最大実行時間を短縮するための設定可能なスケジュールテーブル > LINIF:LIN トランシーバーによるウェイクアップ。この機能により、外部からのウェイクアップの後、マスターによる 2 番目の (不要な) ウェイク アップパルスを除外できます。 > LINSM:インターフェイスを拡張し、LIN スケジュールテーブルの切替えを管理する LINSM サブモードを監視 > LINSM:スケジュールテーブルの自動選択により、スタートアップ時の動作を最適化 (設定可能) 以下の機能はオプションで提供可能です。 > LINIF:UDS 診断通信などの伝送のセグメント化に対応するための LINTP の実装 > LINTP:診断要求および応答でのスケジュールテーブルの正確な切替えを目的としたゲートウェイ機能の拡張
> Post-build loadable および Post-build selectable:詳しくは、「MICROSAR バリアントハンドリング」のセクションをご覧ください。
設定
設定には、簡単で便利なツールDaVinci Configurator Pro のご利用を推奨します。詳しくは、ベクターまでお問い合わせください。 その他のLIN 通信スタック用 MICROSAR 製品
AUTOSAR アーキテクチャーに基づいた LIN 用の完全な通信スタックは、MICROSAR.LIN および別途入手可能な MICROSAR.COM、 MICROSAR.MCAL、MICROSAR.EXT の各パッケージのベーシックソフトウェアモジュールで構成されています。MICROSAR.LIN をアプリ ケーションやハードウェアと接続させるには、以下のベーシックソフトウェアモジュールも必要です。
> MICROSAR.MCAL のハードウェア固有 LIN ドライバー (LINDRV)
> MICROSAR.EXT のハードウェア固有トランシーバー制御 (LINTRCV)
> MICROSAR.COM の汎用通信モジュール (COM、PDUR)
MICROSAR.MCAL および MICROSAR.EXT のモジュールは、各種マイクロコントローラーやトランシーバーに対応しています。 その他のLIN 用 MICROSAR 関連製品
> MICROSAR.SYS の DET、ECUM、COMM
> MICROSAR.XCP により、ASAM XCP に準拠した測定とキャリブレーションが可能になります。このモジュールは CANoe.XCP および
CANoe.AMD に加え、CANape との併用に特化して最適化されています。LIN ECU 用として、MICROSAR.XCP には関連する LINXCP トランスポートレイヤーが含まれています。XCP-on-LIN は公式には定義されていないため、この XCP-on-LIN 実装は ASAM 規格の拡張 となっています。
> VX1000If モジュールを使用すると、測定およびキャリブレーションハードウェアである VX1000 のドライバーを量産時に無効化できます。検 査や開発の際は、API を通じてこの VX1000 ドライバーを再び有効化できます。量産品で使用する場合は、納入時にこのモジュールを MICROSAR SIP に含めて、承認を受けてください。ただし、VX1000If 使用時は、量産プロジェクトでもランタイム中に VX1000 ドライバー の有効化はできません。
LIN ECU 開発用ベクターツールチェーン
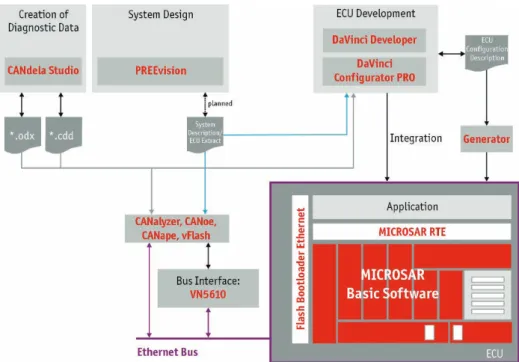
MICROSAR.ETH – Ethernet 通信用 AUTOSAR ベーシックソフトウェアモジュール
Internet Protocol とその上位層にある UDP および TCP の両トランスポートプロトコルは、Ethernet を介した高速データ交換を目的として、極 めて幅広く使われている規格です。
MICROSAR.ETH (Ethernet) パッケージには、AUTOSAR ベーシックソフトウェアモジュールと、ECU 間の Ethernet 通信に関する自動車用 規格に準拠して開発されたTCP/IP スタックが含まれています。AUTOSAR 4.0 は、Ethernet を初めてネットワークテクノロジーとして規定した バージョンです。AUTOSAR 4.1 では、この仕様が大幅に加筆修正されました。AUTOSAR 4.2 ではさらに、Ethernet スイッチの設定や ECU 間の時間同期などが明記されています。MICROSAR.ETH のベーシックソフトウェアモジュールは、AUTOSAR 4.x に対応し、さらに AUTOSAR 3.x を補足するものとして提供されています。
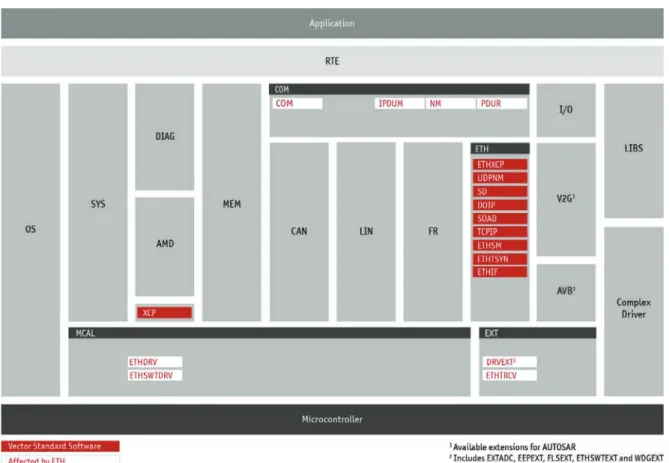
図17: AUTOSAR 4.2 対応の MICROSAR.ETH モジュール
MICROSAR.ETH の機能概要
> ベーシックソフトウェアモジュールはAUTOSAR 4.1 および 4.0 に対応し、さらに AUTOSAR 3.x を補足
> TCP/IP スタックは自動車用規格に準拠して開発され、Fraunhofer ESK によってテスト済み
> オープンソースソフトウェアは不使用
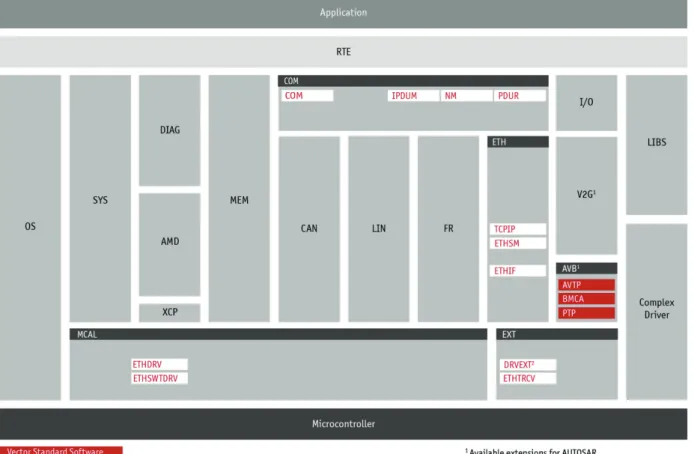
> Vehicle-to-Grid 通信 (MICROSAR V2G) や Audio/Video Bridging (MICROSAR AVB) などを AUTOSAR Ethernet および
TCP/IP スタックにシームレスに統合
> お客様固有の機能/モジュールをあらゆるレベルでシンプルに統合
Ethernet のデータスループットが上がれば、ソフトウェアのダウンロードと診断の総所要時間も大幅に短縮されます。車内にゲートウェイが置か れていれば、それを使用して診断リクエストを車載ネットワークにルーティングできます。これによって、たとえば複数のCAN ECU を、DoIP 経由 で並行して再プログラミングすることが可能となります。MICROSAR.ETH は他の MICROSAR パッケージと連携して、これに必要になるゲート ウェイ機能を実装します。フラッシュブートローダー (FBL) で MICROSAR.ETH を使用していれば、Ethernet ネットワークに相互接続されている ECU (ゲートウェイ本体など) を DoIP 経由で直接再プログラミングできます。
Ethernet ECU の測定およびキャリブレーション用に提供される MICROSAR XCP on Ethernet を使用すれば、帯域幅を余裕を持って利用で きるようになります。XCP ルーティングによりゲートウェイが拡張され、CAN および FlexRay の ECU も (車載) Ethernet ポート経由で XCP に より測定することが可能になります。
MICROSAR.ETH は、診断、測定、キャリブレーションなどの応用分野で、外部インフラストラクチャーと車両を結ぶ Ethernet ベースの通信を可 能にするだけでなく、車内の Ethernet ネットワークを効率的に利用することも可能にします。「IP を介するスケーラブルなサービス指向のミドル ウェア (Scalable service oriented middleware over IP)」、すなわち SOME/IP を使用すれば、たとえばデータをサービス指向で送信するこ とができます。これには、AUTOSAR 4.1.1 で導入された、サービス管理のための Service Discovery ベーシックソフトウェアモジュール (SD) の 使用が必要になります。サービス指向のほかに、SOME/IP ではデータの動的なシリアル化が可能です。この実装は RTE トランスフォーマーとし て提供されています。SOME/IP トランスフォーマーについて詳しくは、MICROSAR.RTE および MICROSAR.COM の各章をご覧ください。 Ethernet 上でのシグナルベースおよび PDU ベースのデータ送信ももちろん可能です。
MICROSAR.ETH の一部は、Vehicle-to-Grid 通信や Audio/Video Bridging の基盤としても機能します。これらの応用分野について詳しくは、 MICROSAR V2G および MICROSAR AVB の各セクションをご覧ください。
機能
以下に示す MICROSAR.ETH のベーシックソフトウェアモジュールには、AUTOSAR 4.1.x で定義されている機能が含まれています。 AUTOSAR 4.0 または AUTOSAR 3.x ソフトウェアスタックで使用できるよう、これらには適切な互換インターフェイスが用意されています。
> ETHIF:Ethernet Interface (ETHIF) は、Ethernet ドライバー (ETHDRV) と Ethernet トランシーバードライバー (ETHTRCV) に対す
る、ハードウェアの種類に依存しないアクセスを可能にします。AUTOSAR 4.1 より、このモジュールは VLAN の処理も担当しています。 Ethernet スイッチドライバー (ETHSWTDRV および ETHSWTDRV EXT) のハードウェアに依存しない制御は、AUTOSAR 4.2 より ETHIF に含まれています。
> ETHSM:Ethernet State Manager (ETHSM) は、Ethernet クラスターで通信を起動または終了するための、Communication
Manager (COMM) に対する抽象化されたインターフェイスを提供します。ETHSM は ETHIF を介して Ethernet ハードウェアにアクセス します。
> ETHTSYN:Time Synchronization over Ethernet (ETHTSYN) は、IEEE 802.1AS に準拠した Generalized Precision Time
Protocol (gPTP) を実装します。これによって Ethernet ECU 間のクロック同期が可能になります。
> ETM: Ethernet Testability Module (ETM) は、プロトコルコンフォーマンステストのための標準規格を実装します。このモジュールにより、
外部に接続されたテスト環境でもUDP パッケージの送信や TCP コネクションの作成などの定義された動作をトリガーすることができます。 ETM モジュールは AUTOSAR 4.3 で仕様化され、現在は拡張機能として利用可能です。
> TCPIP:このモジュールには、UDP ベースおよび TCP ベースの通信に利用されるすべてのプロトコルが含まれています。これは IPv4 と
IPv6 に対応し、1 つの ECU での IPv4 と IPv6 の並行動作をサポートします。これには以下のプロトコルが含まれています。
> IPv4、ICMPv4、ARP、DHCPv4 (クライアント) > IPv6、ICMPv6、NDP、DHCPv6 (クライアント) > UDP、TCP 車外の外部インフラストラクチャーとの通信などのユースケースでは、状況によりTCP/IP スタックに追加の機能が必要になる場合があります。 MICROSAR.ETH には、以下の IETF RFC をカバーする、2 つの拡張が加えられています。 > IPv6 の拡張