平成
29
年度
卒業研究論文
慣性 ン
動作測定装置 開発
平成
30
年
2
月
14
日
指導教員
福永道彦
准教授
大分大学工学部
機械・ ネ
ー
工学科 ネ
ー ー
学籍番号
1451010
目次
1. 序論
2.姿勢計測法
2.1.3次元角度推定
2.2.静止時 誤差 補正 測定方法
2.3.Madwick タ 用い 方法
3.実験方法
3.1.計測
3.2.膝関節 比較
3.3.立 上 動作 計測
3.4.歩行動作 計測
4.実験結果 考察
4.1.膝関節 比較結果
4.2.立 上 動作 計測結果
4.3.歩行動作 計測結果
5.結論
参考文献
1.序論
慣性 ン ン ,加速度 ン ,MEMS Micro Electro Mechanical Systems
技術 著 く小型化,低価格化 進 い . ,身体部位 取 付け こ
,身体部位 姿勢 簡易 計測可能 あ 事 , ー 工学,医療工学分野等
い ,慣性 ン 用い 運動計測法 提案さ い .現在,身体運動計測 い ,
主 タ や高速度 得 映像情報 3 次元位置座標
算出 DLT Direct Linear Transformation 法 用い い . ,DLT法 用い
運動計測 高価 大規模 あ ,専用 計測場所 必要 あ .一方,慣
性 ン 用い 方法 ,低 あ ,簡易 計測場所 制限さ い計測 可能
あ .慣性 ン 得 計測情報 ,加速度や角速度 あ ,身体運動計測
い 重要 情報 あ 姿勢情報 ,角速度 積分計算や重力加速度 変換 得
こ [1].
, ン 得 角速度 微小 誤差 存在 ,積分計算
こ , 誤差 蓄積 うこ , ン 長時間 運動計測
い. ,角速度 積分 得 角度 3 次元姿勢 表 必要
ー ・ チ・ ー角や ー角 異 あ ,回転順序依存性 あ ,
正確 姿勢測定 い.更 , ン 計測開始時 姿勢情報 得
こ い為,あ 初期姿勢 計測 け い等 短所 あ .
こ , 誤差 影響や初期姿勢 問題 解決さ 姿勢計測 幅広く利
用 . ,関節角度 加え ,床反力 測定 入力値 こ ,筋骨格系
化 関節 び筋 負担 推定 こ .従 ,身体運動 解析
い ,関節角度等 姿勢情報 得 こ 重要 あ ,慣性 ン 正確
姿勢情報 得 方法 構築 必要 あ [2].
ン 誤差 修正 方法 ,角速度 ン ,加
速度 ン ,地磁気 ン 用い 補正 ン ュー ン 提案さ ,3 軸
ン ,3軸加速度 ン ,3軸地磁気 ン ー ・ チ・ ー角 推定
等 提案さ い .こ 方法 , ン 誤差
補正 姿勢情報 推定 こ . ,通常 回転行列 違い ン
起 い ータニ ン 使 推定方法 提案さ い .こ 方法 正確
姿勢情報 得 ,無線 LAN 通 プ 付 PC ータ 送信 ,
タ 姿勢情報 可視化 こ .更 ,測定場所 限定さ い動作
解析 可能 ,普段 生活 中 姿勢解析 可能 .
本研究 ,測定場所 限定さ い姿勢情報 計測 可能 こ 目的 ,加
速度,磁気,角速度 ン ュー ン 方法 検討 行 .本研究 ,動作
い い 加速度 磁気 姿勢情報 推定 ,動作中 角速度 姿勢情報 推定
方法.常 ,加速度,磁気,角速度 3 情報 推定 方法 2通 ン
ュー ン 方法 提案 .こ 2 方法 用い,膝関節 屈曲,内外反,回旋
2.姿勢計測法
2.1 3次元角度推定
身体動作 測定 こ ,関節 角度 測定 こ 同義 あ .関節角度 ,
関節 繋い い ン 相対姿勢 表現 あ . え 膝関節 あ
,大腿骨 脛骨 相対姿勢 屈曲角度,内外旋角度,内外反角度 表現さ .
,こ 角度 表現 臨床的,解剖学的 あ ,必 ー角表
示 う 数学的厳密さ 有さ い. こ Grood ,数学的厳密さ 臨床的分 や
さ 両立 関節座標系 提案 .本研究 結果 関節座標系 従 表 ,本
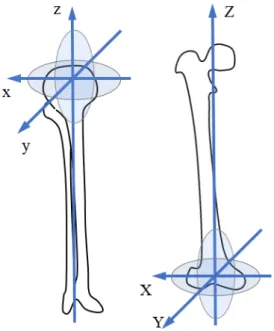
節 大腿骨 脛骨 相対位置 関節角度 算出 方法 い 記述 .
,関節角度 算出 ,大腿骨 脛骨 ン 固定さ ー
座標系 基底ベ 必要 あ .図 1 う 大腿骨,脛骨 ー 座標系
,XYZ,xyz 決定 .わ や く ,XYZ 軸 単位ベ
IJK,xyz 軸 単位ベ ijk . ,こ � 単位ベ
意味 ,� 大腿骨 外側ベ ,� 大腿骨,脛骨 双方 垂直 ベ ,� 脛
骨 上方向ベ ,�′(大腿骨 前方向ベ ),�′ 脛骨 前方向ベ
[3].
表1 関節座標系 人間 膝 適応
大腿骨 軸 屈曲 � = �′ =
脛骨 軸 脛骨 回旋 � = �′ =
浮動軸F � = � × � /|� × � |
,右側 向け ベ i,I,前方 向け ベ j,J .
表2 臨床回転
=�lexion sin = −� ∙
={
π+ Adduction,right knee
π− Adduction,left knee cos = ∙
γ=External rotation sinγ = {−� ∙ ,right knee � ∙ ,left knee
大腿骨 脛骨 相対的 関係 図2 示さ い . ,表1,2 臨床回転 定義
際 使用さ 記号規則 あ .屈曲運動 大腿固定軸 周 起こ
,回旋運動 脛骨 固定軸周 起こ .浮動軸周 内外反運動 発生 .屈曲
び脛骨 回旋 ,各骨 浮動軸 固定軸 間 形成さ 角度 あ .
,次 2 関係 示さ .
cos = �′ ∙ � = ∙ � = flexion 2.1-1
cosγ = �′ ∙ � = ∙ � γ = tibial rotation 2.1-2
,cos = cos − , γ 大 さ 符号 関係 く大 さ 求 こ
� ∙ = cos π+ = − sin 2.1-3
� ∙ = {cos
π
+ γ = −sinγ, right knee
cos π− γ = sinγ, left knee 2.1-4
式 2.1-4 符号 任意 決 あ ,脛骨 回旋 外旋,内旋共 正 角
度 .内外反 大 さ 大腿骨 脛骨 固定軸間 角度 次 関係 あ こ
わ .
cos = ∙
Adduction={ −
π,
right knee
π
− ,left knee 2.1-5
式(2.1-3), 2.1-4 , 2.1-5 用い 左足 屈曲,内外反,回旋 求 .
�lexion = sin− −� ∙ 2.1-6 Adduction =π− cos− ∙ 2.1-7 External rotation = sin− � ∙ 2.1-8
以上 う ,大腿,脛骨 固定さ 基底ベ 既知 あ ,関節角度 算出
こ .以下 節 ,こ 基底ベ 測定 方法 2通 説明
.
2.2 静止時 誤差 補正 測定方法
本節 ,身体静止時 加速度 磁気 向 用い ン 姿勢 算出 ,身体
動作時 角速度 積分 ン 動作 追跡 . ,動作 止
改 加速度 磁気 算出 行い積分 度差 補正 . ,
加速度 ン 得 重力加速度 地磁気 ン 得 単位ベ 算出
.
本方法 い ,測定対象 ン 一様 重力場,磁場 あ 事 前提
い . ,重力 磁気 向 用い ー 座標系 構築 ,各 ン
固定さ ー 座標系 基底ベ ー 座標系 表現 こ ,関節
角度 算出 必要 情報 取得 . ,加速度 ン 得 重力加速度 地
磁気 ン 得 磁場 用い こ 初期姿勢 算出 .重力加速度 地磁気
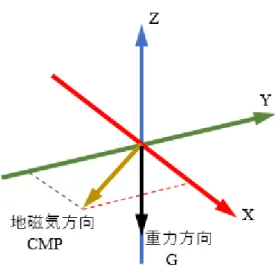
無次元 向 G,CMP ,単位ベ 扱う.図3 示 う ,式 2.2-1 ,
2.2-2 , 2.2-3 互い 直交 基準ベ X,Y,Z 定 [4].
Z=-G 2.2-1
X=Z×CMP 2.2-2
X=Z×Y 2.2-3
い. ,重力軸方向 地磁気軸方向 重 こ 想定さ う 環境, ,
重力や地磁気 存在 い環境 こ 計算 用い 基準ベ 定 こ
い.基準ベ X,Y,Z X軸方向成分,Y軸方向成分,Z軸方向成分
値 あ ,計 9 個 値 3 行 3 列行列 扱う.ここ 算出さ 単位ベ 式
4654 適応 こ 屈曲,内外反,回旋 求 . ,こ 場合,歩行時
並進加速度 大 く 運動 並進加速度 白色雑音 計算さ 外乱 生 .
こ ,歩行時 並進加速度 大 く 運動 , ン 得 角
速度 姿勢情報 以下 う 計算 .
3軸角速度 ン ン 付随 直交 基準軸 角速度� ,� ,� 検
出 こ . 角速度 ベ 合成 こ ,3 次元的 回転
角速度� 軸ベ A 算出 こ .関係式 式 2.2-4 ,2.2-5 ,2.2-6
示 .
� = ( ) 2.2-4
= |�| 2.2-5
= �⁄ 2.2-6
角速度� ンプ ン 周期�� 掛け合わ こ 角度変化量���� 求 こ
.関係式 式 2.2-7 示 .
���� = ∆t 2.2-7
大 さ1 回転軸ベ = [� ,� ,� ] 周 角度�回転さ ベ 計
算 式 2.2-8 回転公式 用い .
� = [n ncos θ + n− cos θ + n sin θ− cos θ n ncos θ + n− cos θ − n sin θ n n− cos θ n n − cos θ + n sin θ− cos θ − n sin θ
n n − cos θ − n sin θ n n − cos θ + n sin θ cos θ + n − cos θ
] 2.2-8
式 2.2-1 , 2.2-2 , 2.2-3 ,式 2.2-8 求 単位行列 式 2.1-6 ,
2.1-7 , 2.1-8 用い 膝関節 屈曲,内外反,回旋 求 .
2.3 Madwick タ 用い 方法
ここ ,Madwick タ 用い 単位ベ 算出 行う.Madwick タ 用
い 単位ベ 算出 行う場合, ータニ ン 計算 必要 . ータニ
ン ,3次元空間内 軸 , 軸中心 回転 表 4次元数 あ [2].例え ,4次元
数q a,x,y,z 実数,i,j,k 虚数単位 ,q = a + x + y + z う 表さ .3次
ータニ ン 回転軸 単位ベ Ar,回転 θ 式 2.3-1 定義さ , ,
, ,Ar 構成要素 x,y,z軸方向 成分 [5].こ 図4 示 .
= [q ] = [cos θ − sin θ − sin θ − si n θ ] 2.3-1
,q 3 次元座標系B 3次元座標系 変形さ あ ,式 2.3-2
う 表 .
= = [q − − − ] 2.3-2
次 ,3 3次元座標系A,B,C け 関係 式 2.3-3 う 表 .
= ⊗ 2.3-3
2 ータニ ンa,b ン 法則 用い 式 2.3-4 う 表 .こ
こ ,a,b 入 替え こ 不可能 あ , ⊗ ≠ ⊗ あ 事 わ .
⊗ = [a ] ⊗ [b ]
= [
− − −
+ − −
− − −
+ − −
] 2.3-4
ータニ ン 表さ 回転行列� 式 2.3-5 う 表 こ
.
R = [
q − + q q q + q q q q − q q
q q − q q q − + q q q + q q
q q + q q q q − q q q − + q
] 2.3-5
航空工学 用い ー角 ,θ,ϕ 用い ,3次元座標系A 3 次元座標系B
z 軸周 ,y 軸周 θ,x 軸周 ϕ回転さ こ 表 .こ 得
ー角 ,θ,ϕ 次 式 2.3-6 , 2.3-7 , 2.3-8 求 こ .
= Atan q q − q q , q + q − 2.3-6 θ = − sin− q q + q q 2.3-7 ϕ = Atan q q − q q , q + q − 2.3-8
, 誤差 軽減 Madwick 研究結果[5] 用い, タ
作成 .
関節角度 求 ,x,y,z軸 け 単位ベ 必要 .
こ ,式 2.3-6 , 2.3-7 , 2.3-8 求 ー角 x,y,z軸
回転行列 用い 単位ベ 求 .計算方法 式 2.3-9 示 .
[ ] [ cos ϕ −sin ϕ
sin ϕ cos ϕ] [
cos θ sin θ
−sin θ cos θ] [
cos − sin
sin cos ] 2.3-9
式 2.3-9 求 単位行列 式 2.1-6 , 2.1-7 , 2.1-8 用い 膝関節 屈曲,
3.実験方法
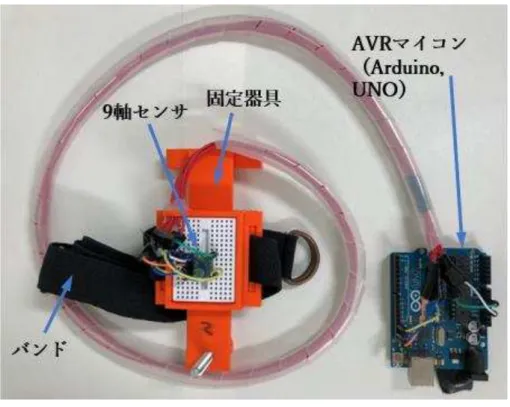
3.1 計測
本研究 用い 計測 図 5 示 .本計測 ,3 軸加速度 ン
InvenSense,MPU-9250,測定範囲:±2[g] ,3軸 ン InvenSense,MPU-9250,測定
範囲:±250[deg/sec] ,3軸地磁気 ン 旭化成 ニ ,AK8963,測定範囲:
±4800[μT] 搭載さ 9軸 ン ュー 2 用い ,3軸 角速度,加速度,
磁場 計測可能 あ . 2 ン 大腿 下腿 図2 様 装着 .各 ン
情報 取得 ,PC 送信 ,AVR ン Arduino,UNO 使用 い .
本計測 大 さ 121×53×50mm,重さ78g あ ,身体部位 直接取 付け こ
,3次元 角速度,加速度,磁場 計測 こ [2].2章第2節,第3節 述
2 推定方法 用い,実験 行う.2 章第 2 節 述 方法 ,対象 ン
動作 い う 判断 値 , い値 0.1[rad/s] ,合成角速度
い値 0.1[s]以上越え続け 場合 動作中 計算 行う.
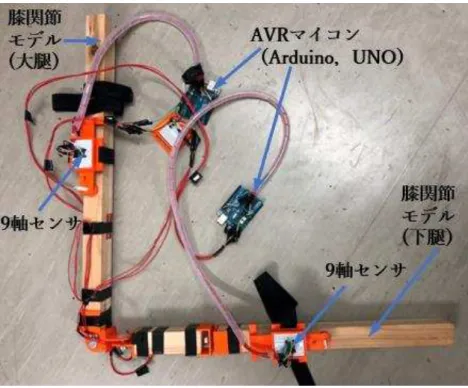
3.2 膝関節 比較
本研究 提案 方法 精度 示 , ン ータ 搭載 ,膝関節
実験装置 得 角度 本方法 用い 推定 姿勢情報 比較 行 .
実験装置 計測 取 付け位置 図6 示 .本装置 ,各軸周 3個
ン ータ Supertech Electronic Co.Ltd,16K4 搭載 ,3自由度 関節角度計
測 可能 あ .こ , ン ータ 単位ベ 算出 式 3.2-1 用
い 行う.
[ ] [ cos θ −sin θ
sin θ cos θ ] [
cos θ sin θ
−sin θ cos θ ] [
cos θ − sin θ
sin θ cos θ ] 3.2-1
,θ ,θ ,θ ン ータ1,2,3 得 角度 .
ン ータ AVR ン Arduino,UNO 用い PC 接続 ,計測
同期 ータ 取得 こ .計測開始後約 5 秒間静止 後 ,
手動 ー , チ, ー角 変化 う 回転さ ,計測
ン ータ 情報 計測 .計測 ンプ ン 周期 100Hz あ [1].
3.3 立 上 動作 計測
椅子 立 上 動作中 膝関節角度 推定 行 .足 ー ー 付け,
撮影 ,画像由来 角度 本計測 由来 角度 比較 .実験装置 足
取 付け位置 図7 示 .起立 状態 計測 開始 ,開始後約 5秒間静止 後
起立,着席動作 3回行う.被験者 健常男子1名 ,動作 速さ 指定 1回
実験 起立,着席動作 4回行 .計4回 実験 行 .
3.4 歩行動作 計測
歩行動作中 膝関節角度 推定 行 .J. Favre 歩行周期 計測結果[6] 比較
行 .実験装置 足 取 付け位置 3.3 同様 あ .被験者 健常男子 1 名
4.実験結果 考察
4.1 膝関節 比較結果
膝関節 比較結果 図8 示 .2.2章 述 静止時 誤差 補正
測定方法 ,屈曲 最大誤差56.50°,平均誤差13.64°,内外反 最大誤差48.30°,
平均誤差17.23°,回旋 最大誤差141.2°,平均誤差82.49° あ ,現用 動作測定装置
比較 精度 悪 .こ ,回旋角度 誤差 最 大 .回旋角度 地
磁気 ン 値 主 推定 い .地磁気 ン 磁性体 影響 受けや く,様々
外的要因 測定値 常 変動 い こ 推察さ ,測定精度 低下 原因
あ こ 考え . ,屈曲角度 90° 近 く ,内外反 角度推定 用い
地磁気 割合 大 く .こ こ ,屈曲角度 90°付近 場合 内外反角度 精
度 低下 原因 地磁気 ン 外的要因 あ こ 考え .
2.3 章 述 Madwick タ 用い 方法 ,屈曲 最大誤差 37.22°,平均誤
差12.19°,内外反 最大誤差16.81°,平均誤差8.013°,回旋 最大誤差58.57°,平均誤
差 20.08° あ ,現用 動作測定装置 比較 精度 悪 .こ ,初期姿勢
算出 角速度 用い ,初期姿勢 誤差 角度算出時 誤差 推測
. ,地磁気 外的要因 , タ 補正値 誤差 生 こ 推察さ
,測定精度 低下 原因 あ こ 考え .
地磁気 ン 測定値 検証実験 ,静止時 地磁気 ン 値 測定 .大腿,
下腿 各 ン 算出さ 地磁気 方向 図 9 示 .本来,同一方向 向い い
地磁気 あ ,大腿,下腿 ン 得 方向 約20° 差 あ ,こ
回旋角度 誤差 繋 い 考え .
4.2 立 上 動作 計測結果
立 上 動作 画像由来 ン 由来 測定結果 比較結果 図 10 示 .こ
時,画像由来 角度 起立時,着席時 屈曲角 測定 .
2.2章 述 静止時 誤差 補正 測定方法 ,屈曲角度 精度 く測定
い こ わ . ,回旋角度 常 -30°付近 示 い .こ ,4.1章
述 地磁気 外的要因 変化 原因 考え .
2.3 章 述 Madwick タ 用い 方法 ,起立時 屈曲角度 徐々 減少
い .こ ,地磁気 外的要因 , タ 補正値 誤差 生 こ
考え . , 方法 ,動作中 筋肉 収縮 影響 ン ,骨
軸 ン 軸 うこ 原因 考え .
4.3 歩行動作 計測結果
歩行動作 測定結果 図11 示 .
2.2章 述 ,静止時 誤差 補正 測定方法 ,計測開始直後 屈曲
二峰性 見 ,計測開始 4 秒以降 ,周期的 値 . ,大
く角度 変化 こ い内外反角度,回旋角度 大 く変化 い .J. Favre 歩
行周期 計測結果[6] 比較 ,屈曲 い 計測開始直後 同様 歩行周期
,計測開始 4 秒以降 同様 周期 得 .こ ,歩行時 ン
度 低下 こ 考え .
2.3 章 述 Madwick タ 用い 方法 , 測定値 い 周期的
値 変化 ,内外反角度,回旋角度 大 く変化 い .J. Favre 歩行周
期 計測結果[6] 比較 ,同様 波形 , 点 い .こ
,地磁気 外的要因 , タ 補正値 誤差 生 ,実際 誤差
値 異 値 計算 い こ 考え . ,4.1 章,4.2章 比 ,
方法 屈曲角度 短い時間 大 く変化 ,角速度 ン 測定可能範囲 超え
い こ 考え .更 ,動作中 筋肉 収縮 影響 ン ,骨軸
5.結論
本研究 慣性 ン 用い 動作測定装置 製作 あ ,加速度,地磁気,角速度
値 用い ベ 計算法 構築,角速度 誤差 補正方法 提案 ,補正方
法 実行 プ 構築 行い, ン ータ 比較,起立着席動作 歩行
動作 測定 行 .
得 実験結果 ,先行さ 実験 結果 比較 差異 見 .原因
,地磁気 外的要因 変化,角速度 ン 測定範囲 超え 角速度 変化 あ
こ ,更 , ン 固定方法 原因 推察さ .
今後 課題 ,地磁気 外的要因 変化 対応 ン ュー ン 構築,
参考文献
[1] 近藤 亜希子,土岐 仁,廣瀬 圭,慣性 ン 用い 身体運動計測 け 3次元
姿勢推定法 関 研究,日本機械学会論文集 C編 79巻803号, 2013
[2] 廣瀬 圭,土岐 仁,近藤 亜希子,慣性 ン ・地磁気 ン 用い ー
け 姿勢計測 関 研究, ー 産業学研究,Vol.22,No.2 2012
[3] E.S.Grood,W.J.Suntay, A Joint Coordinate System for the Clinical Description of Three-Dimensional Motions:Application to the Knee ,Transactions of the ASME,Vol.105,pp.136-144,MAY
1983
[4] 平岡 匠一,慣性・地磁気 ン 用い 動作解析装置 製作,大分大学修士論文 2016
[5] Sebastian O.H.Madgwick,An efficient orientation filter for inertial and inertial/magnetic sensor arrays 2010
図1 大腿,脛骨 ー 座標系
図3 重力加速度 地磁気 基準軸ベ
図5 計測
図6.2 ン 膝関節 装着図
図8.1 屈曲角度 膝関節 比較
図8.2 内外反角度 膝関節 比較
-20 0 20 40 60 80 100 120
0 2 4 6 8 10
屈曲角度
[d
eg
]
時間[s]
静止時 誤差 補正
Madwick タ
ン ータ
-60 -40 -20 0 20 40 60
0 2 4 6 8 10
屈曲角度
[d
eg
]
時間[s]
静止時 誤差 補正
Madwick タ
図8.3 回旋角度 膝関節 比較
図9 各 ン 得 地磁気方向
-100 -80 -60 -40 -20 0 20 40 60 80 100
0 2 4 6 8 10
屈曲角度
[d
eg
]
時間[s]
静止時 誤差 補正
Madwick タ
図10.1 静止時 誤差 補正 方法 比較
図10.2 Madwick タ 用い 方法 比較
-60 -40 -20 0 20 40 60 80 100 120
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
膝関節角度
[d
eg
]
時間[s]
屈曲
内外反
回旋
画像由来 屈 曲
-40 -20 0 20 40 60 80 100
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
膝関節角度
[d
eg
]
時間[s]
屈曲
内外反
回旋
図11.1 静止時 誤差 補正 方法 歩行計測
図11.2 Madwick タ 用い 方法 歩行計測
-150 -100 -50 0 50 100 150
0 2 4 6 8 10
関節角度
[d
eg
]
時間[s]
屈曲
内外反
回旋
-60 -40 -20 0 20 40 60 80 100
0 2 4 6 8 10
関節角度
[d
eg
]
時間[s]
屈曲
内外反