【研 究 論 文】 UDC :624
.
074.
4:624.
04 日本 建 築学会構 造 系 論 文 報告 集 第 348 号・
昭和 50 年 2 月モ
ー
ド
重
ね
合
せ
法
に
お
け
る
Updated
−
Lagrange
定
式 化
の
適 用
に
つい て
そ の1
.
薄肉弾
性体
の軸対称大変
形 解析
正 会 員 正 会 員鈴
元
木
結
敏 郎
* 正次 郎
**1
.
序1
幾 何 学 的 非 線 形 問題に対し,’
古くか ら種々 の解 析 法が 考案さ れて き た。
球 形シェ ル等の研 究におい ては,
モー
ド 重ね合せ法・Galerkin
法が多く用い られて い る が1 〕−
5),
そ れ らの研 究の中で展 開さ れて いる定 式 化 方法は, 初期 の空 間 固 定の座 標 系に対 して定式化を行うTotal−Lag −
range 定 式 化 (以 下,
T.
L.
定 式 化)で あ る。
しか しこ の定 式 化による限り,
大 変 形の領域に な るに したがい, 誤 差 が 大き くな る事は自明であ り,
そ れ を補 正す る た め に は極めて高 次の非 線 形 項まで考慮 す る 必要が あるTLs )。
こ の よ うに多くの非 線 形 項を考 慮す るの は,
定 式 化 を複 雑に し解 析 上 あまり適 してる と は言え ない。
一
方, 有 限 要 素法に おい て は,
先のT .
L 。
定 式 化と と もに諸量を 各変位 段 階ごとに変 形し た形 状に対し て定 義す るUp ・
dated−Lagrange
定 式 化 (以 下,
U .
L .
定 式 化) が確立 さ れて き て お り, 薄 板 構 造 物・
骨 組 構 造 物に対す る極めて大変形の領 域に お け る挙 動を 追 跡 す る 事 が 可 能 と なっ てい る。
こ の よ うなU .
L.
定 式 化に先の モー
ド重ね合せ法を 適 用.
し, 球 形シェ ル等の大 変 形 領域にお け る 挙 動 追 跡 を 可 能 とす るのが本 論 文の 目的で あ る。 U.
L.
定 式 化に 対する有限要 素 法の適 用 方 法とし て は,
棒要素・
平板要「
素に見られ るよ うに変 形 後 要 素の節 点が構 成す る直 線あ るいは平面を含むDescartes
座 標 系奪
局 所 座 標 系と して 移 動 座 標系を考 慮する方 法や アイソパ ラ メ トリッ ク要素 に対 して,.
文 献 (6),
(7)で行わ れてい る よ うに歪・
応 力 等につ い て Descartes座標系 成分 を考慮し要素の変 形はヤコ ビア ン の変化に よ り表現 す る方 法 等がある。
し か し な が ら,
連続 体を対 象と す る場 合 局 所 座 標系をDescartes
座 標 系と お く事は好 まし く な く,
また後 者の 方 法も諸 量につ いてDescartes
座 標 系 成 分を考 慮す る た 本 論文の一
部 は,
文 献12),
13)に お い て発 表した。
拿 東 京工業大学 教授・
工 博 # 東京工業大学 大学院生 (昭 和 58年12月3日原 稿 受 理日,
昭 和 59 年 9 月 ll日改 訂 原 稿 受.
理日,
討論 期限 昭和60年5月末日} めに薄 肉 弾性体に対し Kirchhoff・
Love の仮 定 等を導 入 する事は困 難である。 そこ で本 論 文で は上 記の方 法 をそ のま ま用い る事はせ ず,
次の よ う な点に着 目し,U .
.
L.
定式化に モー
ド重 ね合せ 法 を 適 用 す る事を可能に してい る。 この手法はKirchhoff
−
Love の仮 定 等を導入 し や す く,
薄 肉弾性 体に対す る挙動 追 跡を容易に す る もの であ る。
1
) 薄 肉弾性 体の中央 面と変形と ともに変化す る曲 線座標系に対 し歪・
応 力等を定 義す る。
この事が 薄肉弾性体の 解析に対し 種々 の 仮 定 を 導 入 す る事 を容易にす る。
i
のi
)で設 定 し た座標系に対 し,
第一 ・
第二基 本 計量 テン ソ ル の 変化 を求める事に よ り変形後の座 標 系の変 化 (歪み ) を考 慮する。
liD
薄 肉 弾 性 体の変 位に伴 う全 体 座 標 系・
移 動 座 標 系 間の方 向 余 弦の変 化を求める事により座 標変換 の変化 を考慮 す る。
な お,
本論文で は紙 面の都 合 上軸対称 問題 の み と し, ま た取り扱う座標系は直 交座標 系に限定す る もの と す る。
2.
解 析 法2.
1U .
L .
定 式 化にお け る歪・
変位関 係 式U .
L .
定式 化につ い て は,
文献 (6
)に 示 さ れ ていFig
.
1 Motion of a Thin Elastic Continuum.
る が
,
本 節で は,
薄 肉 弾 性 体の解 析に対してより適 切な 手法 と して,
弾 性 体の中 央 面の変 位に伴い移 動する曲 線 あ るいは曲 面 座 標 系を設 定し,
その 座 標 系 を歪・
応 力 等 を定 義す る基準座標 系と す る手法につ い て展 開を行う。
空間上に あ る薄肉弾 性 体が,Fig.
1
に示す よ うに初 期 状態[C
副か ら変形を受け た状 態[Ctml
]を経て,
さ らに変 形し た状態 [C
冊 IJ に 至 る場合を考え る。 以 下,
1
}[。[,
II
〔耐 }M +m)は そ れ ぞ れの状態に お け る 座標 系 成 分で あ る事を示 す もの とする。 ま た,
特に記 述の ない限り,
増 分 量に対し て は状態Cfm
)に お け る座 標 系 成 分とする。 な お,
添字はロー
マ字が 1〜
3 を 表 し,
ギ リシ ア文 字が 1〜
2 を表す事にする。
状 態Cfm
)か ら状 態C
[m.1 )に移 行 する変位 段 階に対す る 薄 肉弾 性体の 任 意点 P の変 位 増 分ベ ク トル Au を次の よ うに お く。
∠Lロ(θα,
θ3)=
AVo(θα,
0}十 θ3・
Av,(θ a,
0)・
・
・
・
・
・
・
・
・
・
…
(2.
1) △Vo(θα,
0
}=
r(m+
u(θ a,
0)−
r[m ,(θα,
0)・
・
・
…
一・
・
卜
…
(2.
2.
a)Av ,
(θa,O
};19sl
〔肌
+
旧〔θ α ,0
)−
19s
}(θα,
0
〕・
・
・
・
・
・
・
・
・
…
(2.
2.
b
) こ こ で, r は点P
に対応す る中央面上の点P
。の位 置 ベ ク トル,
9eは中 央 面の法 線 方 向に対する基 底ベ ク ト ル である。
また,Av
。,Av
,を状reE
Ct
. ,の 曲 面の基 底ベ ク トル に よ る成分 に よ り表示す れ ば16〕,
△”。
=
i
△万。}α
歹。+{△万。ド歹,‘14
万。}。万 α +ヨ4
万。』歹 3・
t・
・
・
・
・
・
・
…
…
・
−t・
・
…
(2,
3.
a)△・,
=
1
△fi、lao
。+垣万、ド歹、;
i
ム万1}。歹 α +1
ム万,}、ず’
’
’
’
’
’
”…’
’
’
’
’
’
’
’
’
’
”
(2.
3.
b
) とな る。 こ こ で (一
)は曲 面の基 底ベ ク トル に対 する 成 分であ る事 を示して お り, 空 間の基 底ベ ク トル に対 す る成分との関 係は次の よ うに表さ れ る。
1
△v。』= }ム万o}γ (δさ一
θ 3・
Hl9,
}A
Vo』=1
ム万 。}3・
・
・
・
・
・
・
・
・
・
・
…
S・
・
・
・
…
(2.
4.
a)IAv
,}a;14
万i}γ (δさ一
θ 3・
H
孟),iAv
、}3=
IA
万、}3…
t・
・
一
一
4−・
・
…
一
・
・
・
…
(2.
4.
b
) 状 態C
(m )か ら状 態C
〔m.1)へ 移 行す る問に生 ずる歪 増 分 テン ソ ル Aew は, その定義よ り 2AetJ=
lg
‘Jlf. → ,Hgl
,1
〔mド…
t・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(2.
5
> と表さ れ る。 また変 位ベ ク トル成 分で表せ ば,
2△θ‘,耳
∠Lu‘1
丿十 △t乙∫1
‘十△u κ1
‘ムUitlノ・
…
7r
(2.
6) と なる。Appendix
で示すT .
L .
定式 化 にお け る歪・
変 位 関 係 式 [式 (A
, 1 )]と比 較す る と,
添 字や共変微 分が定 義さ れ る座 標 系がU .L.
定 式 化の場合 状 態Cr
。) におけ る もの で は な く状 態 C に お ける座 標 系で ある 点が異 なっ てお り,
こ の事は薄 肉 弾 性 体の変 形に伴う基 準 座 標 系 自体の変 化 (歪み ) を考 慮 して い る事 を 意 味し て い る。
本 論 文で対 象 とす る薄肉弾性体は,Kirchhoff
の仮 定一
76
一
を満 足 するもの とし,
次 式 が 成り立つ もの とす る。
△ea3=
∠Lesa,
Ae3s=0 ・
・
・
・
・
・
・
…
一
一
・
・
・
・
・
・
・
・
・
…
(2.
7)式 (
2.
1
)〜
式 (2.
4) を式 (2,
6
)に代入 す る。
2Aean
= :2ムe窪』十2△el}』・
θ3十2
θ蜜』
・
i
θ3}2・
・
…
(2.
8>こ こ で
,4
露 』,
ムe泓, △器 』は そ れ ぞ れ,
2
△2
』=
IAIo
}alP
+IAIo
}sfa
+IASo
}kIαIA
万o}klβ
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
一
一
・
・
(2,
9.
a)2△ 2艮』;
i4
万 、}。』+IAT
,1
、1
。一
(H
螽AI
。}λ!β+H螽IAT
。} λ1
α)+
IA
万。ド旧ム「σ1}魔1
β+1
ム「σ1ド旧△万。lkln
・
・
・
・
…
一
一
・
…
t…
阜
・
・
(2.
9,
b
)2△ε客』
=
=一
(Jf
裔{△1
,鼠1
β一
←H21A
万IIλ「α
) +IAT
,1
’C1 。IAI
,1
、IP
…・
一 ………・
・
(2.9.
c) と表さ れ る。
薄 肉 弾 性 体の板 厚 方 向に おい て,
歪 が線形 分 布す る も の と し,
ムθ脳 は省 略し, さ らに △θ蔀 にお け る非 線 形 項は他の項に比 し,
十 分 小さい もの と し 無視する。
す な わち,
歪・
変 位 関 係 式は次式で示さ れ る。
2Aeap
=
:
2∠Lθ讐』十2△e匹』・
θ3−一
・
・
・
・
・
・
・
・
…
一
・
…
(2
,
10.
a)2△θ
2
』=IA
万olal β十1Alolnl
α
十{△万olbla {Ah西ol,la
・
『
呷
・
・
・
・
・
・
・
・
・
…
曾
…
(2.
10,
b
)2∠Lε巳』=
1
∠LT,
la
l
β十IAi
,}βla
−
(H
告1
∠s万o}^lm
+H2iAlo
}AIα}………・
・
…
(2.
10.
c) また,
Vl の各 成 分は,
式 (2.
7)より次の よ うに表さ れ る。
1
△1、i
。;一
{△1。ド1
。=−
1
△万。},1
。 , {△万1}、=
0・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(2凾
11 ) 2.
2 U.
L.
定式 化に おける応 力な ら びに応 力・
歪 関 係 式前 節で誘導した 歪増分 は
,
各 変 位 段 階において は変位 前 を基 準 状 態とするGreen
の歪であり, それ と直 接 結 びつ け られ る応 力と し て,
こ こ で は2nd
Piola−
Kirchhoff
の応 力を用い る。 薄 肉弾性 体に対し等 方 弾 性 ま たは平 面 応 力を仮 定す れ ば, 応 力・
歪関 係 式は次の よ うにな る。ASttAsnAsn
ー
)
上 9一
22●
冒
9 9(
−一
2 上 92299・
9
レ万
9ー
2E一
1
Ae
” Aet:’
’
’
’
”tt・
・
・
・
・
…
t・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(2.
12)Aen
こ こ で
,
AScasは 2ndPiola・
Kirchhoff
の応力増分 テン ソ ル で あ り, 状
me
Ct
、、}に対す る座 標系に おける成分である
。
これ より,
状態 C働 か ら状rm
C(M+ 、1 へ 移行す る 際の状 態C
[m )の座 標 系に お け る応 力 成 分 (2皿dPiola−
Kirchhoffの応 力 )を〔m+Vlsas }cm)とすれ ば,
次の ように 求め られる。
(m+i)lsasltm
】=1
τ Cmelm
レ十∠Lses’
”鹽
”・
’
t−・
・
・
・
・
・
…
(2.
13 ) こ こ で,
i
τasltm
】は状ma
C【m)におけ るCauchy
の応 力テ ン ソ ル であ る。
状態C
〔m.1)にお け るCauchy
の応 力テン ソ ルは, 上式で求め ら れ た2nd
Piola−
Kirchhoffの応 力 を座標変換す る事に よ り求め る15) 。 す な わ ち,
嬬 广傭
齢
1
却
・
紮
1
押
・…
一・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(2.
14 > こ こ で,
1
τ‘丿}【m.1)はCauchy
の応 力テン ソ ル,
ρは密 度 を表して いる。
また ∂1
θt}[m,
u/∂{θλ
h
.
)は 座 標 系 間の変 換 係 数であ る。 し か し,1
τas}エm,1), 擢π
}[m.1〕,
1
τ331tm.ilは歪エ ネル ギー
に関 与 し な い [式 (2.
7)参照J
為に,
式 (2」4)は次 の よ うにな る。
・・一
腎
・
犠
1
・
∂lii
:
;
e
!
(:
i1
?
i:
i
・・
c・ … {・・ ”hm
]・
t−…
一
・
・
・
・
・
・
・
・
・
・
・
・
…
(2.
ユ4
’ ) 2.
3U.
L .
定式 化に おける仮 想 仕事式状 態
CT、
、
tl)に お け る諸量 が既 知で ある と し, 状 態C
[m,]】に お け る仮想仕事式を考え る。μ
(1
・・r
。 + △s・ 臨 β}、。+・・。,)AV
一
蕉
[〔繊 +… 臨r
・ +A
・・) 十(1ct
}cml十Ac ‘ )δ(tSi
lfM
十 △β∂]dSo
一
伽
ハ ・+・f
’ )・{i
・・1
・・+衂 +(1mt
}[Pt1+Am ‘ )δ(tet
Ifm
++ △β‘)]dS。−
x
。。。 [(1
∫ + ・ハ ・G
・掃
・,>1
十({ntXm )十△η諺 )δ(協「
1
{m,十AfiT
)]dCo
=0
・
t−・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(2.
15 ) こ こで,fi
, mi は薄 肉弾 性 体の中 央 面の単位面 積 当 た りの合 荷 重ベ ク トル・
合 荷 重モー
メ ン トベ ク トル を,
’
f
‘*,
mtt は力学 的境 界C
。σの 単 位長さ当た りの 境界 力 ベ ク トル,
境界モー
メ ン トベ ク トル を表して おり, ま た pE, ctは中 央 面の単 位 面 積 当た りの合 物 体 力ベ ク トル,
合 物 体モー
メ ン トベ ク トル を表 して いる16)。dS
。は中 央「
面 積 素 で あ る。 な お 簡 略 化の た め に 応。}、を Vt,
臥L
を β,とそ れ ぞ れ記 す 事 に し,
砿 β7
はfi
* , M ‘* に対応 す る変位を表す もの と す る。
初 期応 力を示 して い る1
Tas1
(m )は, 状lux
C(m)に対する 座標系の成 分で あ り,T .
L .
定 式 化の場 合[Appendix.
1
.
式 (A .6
)]の初 期 応 力1S
°slt
。1 は状 態G
。1 に対 する座 標 系の成分である。
その た め にU .L .
定 式 化の 場 合, 応 力 として2
ndPiola−Kirchhoff
の 応 力の み な らず,
Cauchy
の 応 力が 必 要とな る。 式 (2.
15) 中の Aeα ρ に式 (2.
10) を代 入し,
さ らに 増 分 量に対して 3次 以上の項を無 視す る と,
次の ように な る。
脚
・創r
・ 鵜 +1
・aee
… 躍 ・△v・1
・) 十Asa
”aAe
言n]dV
一
蕉
[(ヨ・褊・ ・P
・ 臨 +(鬩 ・・ +副 剃dS
・一
ん
[(胤 ・ ・+A・r
)+(lmr
・ll
・1 十Atnt
“ )δムβ野]dC
。=O ・
…・
・
…………・
……・
…
(2.
16) こ こで.
P」 P‘ 十∫‘・
…・
…・
…・
…・
………・
………・
…
(2.
17)Mt =
C‘一
←mt2Ae
凄e ; ∠1Valβ十 ∠Lひβ1
α
十 θ 3・
[一
(△Vsla)1
β一
(AVa1P
>1
。《H
さAVx1
β十H
島Av
λla
)]一 ・
一 ……・
・
…・
…
(2.
18 ) であ る。 式 (2.
16 )の第一
項を板厚 〔θ 3 方向 )に対し 積分す
る。孤
[△1V
如 δムe盟 +△M
°β 泌 e盟 ]dS
・ ・蕉
鬥 ・ δ伽 尾1
幽 ・)dS
・一
蕉
[・P
脇 +・M
‘aAB
,]dS
・一
ゐ
。[ ・∫…aA
・vr ・A
・n‘・・aAM
]d
・・−
aA・V・
・
・
…
『
・
・
・
・
・
・
・
・
・
・
・
…
.
・
…
(2.
19
) ・・砺 一孤
[囲 ・ 蜘 ・{M
・ }・ 脚 ・]・Se
・
ん
[1
∫・1
・・ 嗣 ・1
狃 鱈 }…嫺 ・q
一
孤
[INes
}圃 齟 e盟 +IMaSI
彪 e盟 ]dS
・’
……・
…………・
…
(2.
20) こ こ で,
2∠」θ客骨=
△vαlp
十 △Vplα・
・
・
・
・
・
・
・
・
・
・
…
一・
・
…
r−…
(2.
21).
2ムe嬲=一
(Av
,la
)1fi
−
〔AVsle
)1
α一
(正1
さ△Valβ十H
螽∠」”λ1
α }・
・
・
・
・
・
・
・
・
…
(2.
22> N・−
1
:
1
:
・at(・−
e・Ei4
・ ・〔eS)2ffX
・£−
e3・
諦
・
・
・
…
7・
・
・
・
…
7−・
・
・
・
…
(2.
23)・
M −−
f
:
1
:
・at〔1一爾
・ ・〔eS
}’fi
)一
゜
(δ受一
θ3’
H{)’
θ3d θ3’
’
’
’
’
’
’
’
”・
・
・
・
・
・
・
…
一・
・
(2.
24 )−
77
一
(H =
IHgl
=H
}H茎一
HlHD・
・
・
・
・
・
・
・
…
(2.
25) で ある。 合 応 力 (Nas,
Mas)・
歪 (器 』, e洗 ) 間の構 成 方 程 式 は,
式 (2,
23),
(2,
24)および式 (2.
12)を考 え る事に よ り求め ら れ る。 そ れを次の よ うに書く。 Nat=D
,)e2』十Dn
ε協・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(2.
26> Mas=
1):1 e畧』十1)2z e9』 こ こで,
次の仮 定 を導する。
eDa
β と して は板厚h
の 5次 以 上の項を無 視する。
・
e洗,
e洗の連 成項Dn ,
D
!1は文 献4
),5
)で用い ら れて いる よ うに零と す る。 こ の仮 定に基づ く事によ り,
式 (2.
26
)を具体 的に表 せ ば次の よ うにな る。Eh
Nes= =2[(1
一
の互叨
歹βン
e2し+ソ互刎 互ρ ”θ嬲 1−
v 〃 ・−12
謬
の [・1一
のy
・ ・9
… eS’L
・… β9
・y ・岩レ]・
・
r・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(2,
27) 式 (2.
21
>に おい てT .L .
定 式 化の場合と異なり,
U .
L .
定 式化の 場 合は状 態 Crm)に お ける座 標 系を 基準座標 系 と してい る ため,
式 (A.
11)中の一
線部が示す初期 歪 に よ る項が現れて い ない。 式 〔2.
19)は状ma
C
[m ]か ら状ue
C
‘m.
、]へ 移 動 する時の 平衡方程式を表し, 式 (2.
20 )は高 次項 を無 視したた め に生じ る不平 衡力ベ ク トル を表し てい る。
ま た,式 (2.19
) 中のiN
”6lcm
,6
(AvMaAvkl
β)は総 和 規 約に し た が う訳で あ る が, 本論 文で は最も影響の大きいと考え ら れ る項の み扱うものとす る。
す な わ ち,
式 (2.
19 )を次の よ うに お く。
蕉
[△1V
鰯 飴 e盟 +△躍伽 δ△e膿 ]dS
・ ・伽
・ 脚 が1
・ ・醐 ・勗一
孤
[ムP
‘8Av
‘十 △M
‘ δz』9
‘]dS
・−
f
。。。 [af
‘・ ・“・・vr ・… 雌 ]dC
・・
aAWr− ………・
……・
…
(2.
28} 3X 2XX
(e1
謡
e
う
、
、
丶
丶、
A
−
Y
・
{9
曳
丶
IN9
、h
.、鳳
1, /磁
)
’’
ラ /KX
!
/’
XN
(
et,
Of
,
0
『
渇}C
{m.
1〕C
Fig
.
2 Relation between GlobalCoordinate
System andLocal
Curvilinear
Coordinate
System.
一
78
一
3.
U,
L.
定 式 化のモー
ド重ね合せ法へ の適 用Fig,
2は空 間固定の全体座標系 (X
‘ )と薄肉弾 性 体 の中 央 面に沿っ た 移 動座 標 系 [1
θt1
,.
,お よ び1
θ i }CM.
、
)]と の 関係を示 し てい る。
ただし,xt
は円 筒 座 標 系, θ i は 軸 対 称 座 標 系 として い る。 中央 面上の点P
。剛 が 点P
。阻 p に変位し た場 合 を考え る。
点P
。(ml の 変 位 増 分ベ ク トルAv
に対す る全 体 座 標 系成分 Ab ‘を変位関数ノ1
丿(θ A >を用い て仮 定する。
AU
‘=
f
.(θ λ 〕・
△α」 orAil
=f・
Aa ………・
…
(3.
1
) こ こ で,.
んは境 界 条 件 を満 足 する関 数 列から成るマ ト リク ス であり,
Aas は一
般 化 変位 増 分ベ ク トル である。
全 体 座 標 系に対する成 分AD 、につ い て変 位 関 数 を設 定す る理 由は,
荷 重 条 件・
境 界 条 件を全体座標 系に対し 常に一
定と す る た めであ る。 全 体 座 標 系 成 分 △V‘と移 動 座 標 系 成 分Ab ‘と の 関 係 は次の よ うに表さ れ る。 ム琶〉1茜ITl
丿(θ a }1
网゜
△運)丿 or △誕};T
[mi・
△〜ヲ・
・
・
…
(3.
2
) こ こ で,Tw
(θλ )は座標 変換マ ト リ クス であ る。
本論 文では各 増 分 段 階にお け る弾 性 体の回 転 増 分は,
線形 と してい る [式 (2,
11 )参 照]が, 増 分 計 算し てい く過 程 におい て誤 差が蓄積す る事を避け る た め に,
回転増分に よる変 換マ ト リ クス の 変 化ATw
は 正規 直交マ ト リ クス とな るよ うに状 態C
エm, 、)’
状ue
C
(m]の各 座 標系の基 底ベ ク トルが なす 角 度の方 向 余 弦よ り成っ て いる。 本 論文で 取り扱う軸 対 称 問題の場 合,
簡 単に次の よ う に示される。
AT
・一に
蠶篤謙
]
…
(…3
) こ れ より状 態Ccm.1 )に おける座 標 系と全 体 座 標 系 間の 変 換マ トリク ス1
Tu
lcn
+ , )は,
次の よ うに求 め られ る。1
τ‘,1
[m+1)=
△T‘‘。
t
コ「蘆,1
〔刷・
…
一・
・
・
…
一…
一
・
・
・
・
…
(3.
4) 式 (3.
1)・
式 (3.
2
> より∠』
b
‘=
{L
‘丿lfm
)AaJ
orA5 =L
〔m)Aa ・
…
t…
(3
.
5
)こ こ で
,
L‘丿は座 標系1
θ ‘ltm
]に対す る変 位 増 分ベ ク ト ル成分と一
般化変位増分ベ ク トル成 分との関 係を示すマ ト リ クス である。
前 節の式 (2
.
21)・
式 (2.
22)お よ びIADsla
「をマ ト リク ス表 示する。
れ ∠」e彦=
B(m )∠Sb・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(3.
6)AeN=C
〔m )Ab ・
・
…・
・
…・
…・
……一 …………
(3.
7 ) こ こ で, AeT ,AeN
,Av
は軸 対 称 問 題の場 合そ れ ぞ △ e啓「=
〈△θ幤 △ε野 △e幤4e
黙孝〉…・
……・
(3.
8
) ムeN=
1
△ 雪311 ト・
・
・
…
一・
・
・
・
・
・
・
・
・
・
・
・
・
…
鹽
・
・
・
・
・
…
呷
・
・
・
・
・
…
(3
.
9) ∠」bT=
<4
憂)且 ∠L
耄)3>・
一・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(3.
10)と表さ れ る。 ま た
,
式 (2.
27) より合 応 力・
歪の関係式 は次のよ うに表さ れ る。
△1V
」0
△e・
…・
…・
・
・
・
・
………・
…
(3.
11 ) こ こ で,
AIV
「=
<ムハ「ll ∠LNZ2 △ ”H ∠LMz2>・
・
…
(3.
12)4
θ』 〈AelOl
△e翳Ae
i{△囓〉……・
…
(3.
13) で ある。
式 (3.
5 )〜
(3.
7 ),(3.
11 )を式 (2.
28
)および式 (2.
20
) に代入 す る事に よ り一
般化 変位増 分ベ ク トル に対 する平 衡 方 程 式および 不平衡 力ベ ク トルが 得 ら れる。
ただ し,
外 力とし て は簡略化の た めモー
メ ン トに関 する項は無 視 す る もの とする。
蕉
[aA・・{L、。 B,。
、 DB 、m,L
,。
、)Aa
十aA
α『・
ム職レqL
レハ〈側Ctm
]LtmiAa]dSo
一
蕉
畆 ・・f
・7
論 14Pd &一
ん
彪 ・7’77 蝨1盟・
μ ・dC ・= =aAzvr・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(3.
14) aA・w ・一
蕉
δ△・・’・丁繍 ・君。d
哉+
ん
必 ・・f・7,轟 F 盗鵬一
ff
.aA
・・垢 ,B
温IQ
,。 鵡・
一・
・
・
・
・
・
・
・
・
・
・
…
tt・
・
…
(3.
15> 上式 中, 丁翫昭π尸 1である か ら, P, 尸 に関する項 は次の よ うになる。ff
. ・A
・… 君・ ・鉱ん
・… f・ F 姦・・α……・
…・
一 ・
…・
・
…
(3.
16
> また,
式 (3.
14),
(3.
15) を 次の よ うに表す。
δ∠Lα『[(K{m 十 κα鋤〉△α一
△Q
巳x1≡
δン1ωア・
・
・
・
・
・
・
…
(3.
17> δWr=
aAaT [QexrQtn
]…・
…・
……
……
………
(3.
18) こ こ で,
K,
Ka,
Q
。x,
Q
‘n は剛 性マ トリクス, 幾 何 剛 性マ ト リク ス,
外 力ベ ク ト ル,
内 力ベ ク トル をそ れ ぞ れ表して いる。 U.
L.
定 式 化の場 合, 式 (3.
6
>, (3.
7
)中のB
お よ び C マ ト リクス は,
状ma
C
(m )にお け る座標系に対す る 計量 テン ソ ル お よ び共変微 分 等で構成 さ れてい る た め に,
薄肉 弾性体の変形に伴い変化す る。 し た がっ て各変 位 段 階で の 変位後の状態 [Ccm
+1]]にお け る第一 ・
第二 基 本 計量テ ン ソ ル等の値が 必要と なるが,
それ ら は 状 態C
(m}に お け る値が既 知で あ る か ら,
式 (2.5
)・
(2.
10
> よ りrg
αnl
〔m+1,=
短αβ}tm]十2
∠L
e2』・
・
・
・
・
・
…
t・
…
t・
…
一…
(
3,
19 )IHa
β観堺
+
1)=
IHan
}tm,}一
△ε呂』・
・
・
・
・
・
・
・
・
・
・
・
…
一・
(3.
20) と求め る事がで き る。 こ こ では軸対称問題に限定して い る た め,
△ε翫=O
, ム器 』=0
(α≠β〉と な る か ら,
変 形前に座標系i
θ‘1
(m )が直交座標系で あ る な ら ば,
上 式 よ り,
trgafi
l
(m.
i)=O
,IHa
β}fm+
,)≦O(α≠β)
…・
…・
…・
《3.
21) と な る。
し た がっ て変形 後にお ける応 力・
歪の テ ン ソ ル 成 分 (τde・
e。fi>と物 理 成 分 (σ as’
εe”)との関 係は,
次 の よ う に な る15)。
1
・cael
、駲 、=偏
V
煽1
・ 鄒1
。 .ゼー ……
(3.
22)i
εafi }[m+1 )=
V〆ア
.
Vigiii
leap
}(m +1〕…
t・
・
tt・
・
…
(
3.
23
)た だ し, こ こで はa, βに対して総 和を と ら ない。 な お, 式 (
3.14
),
(3.15
)の積分 は ガ ウスの求積公式 に よ り行っ てい る。
以上, 平衡 方程 式お よ び不 平 衡 力ベ ク トルが 求 め られ た訳で あ る が,
本論文で取り扱う アー
チ や シェ ル等の場 合 釣 合 経 路が複雑に な り,
多 くの特異点 を有す る事が 起 り得る ため, 各変位段階ごとに適当な制御パ ラメー
タ を 選ぶ事が必 要かっ 重 要な問 題と な る。
そこで,
本論 文で は制 御法 とし て弧 長 法を採用 し,
制 御パ ラメー
タの選択 を 自 動的に行っ て い る1 °)。 また,
各 増 分 段 階に お ける不 平衡力ベ ク トルの解 放は,
Newton・
Raphson
法にょっ て いる。
4.
数 値 解 析 例 4.
1 円弧アー
チ こ こ で は,
軸 対 称 問題 を扱う前に円 弧アー
チの例を取 上げ,
そ の挙 動 を追 跡し,Appendix
で示すT.
L.
定 式 化に より求め ら れ た結果 と本論文で誘 導 し だU .L .
定 式 化に基づく本 解析法に よ る結果と を比 較 検 討する事に よ り,
大 変 形 領 域で の本 解 析 法の有 効性を示す。 中 央 集 中 荷 重 を受け る両端単純支持の円 弧アー
チに対 し,
偏 平な場 合 (TYPE
I
)お よび 非偏平な 場合 (TYPE
且)を扱う。 両モ デル に用い た変 位関数は,
’
T .L.
定 式 化・U .L.
定式 化ともに次の よ うに仮 定 し た。
・・一
盞
・融 ・多
・・一象
・… s等
1・多
…………r…・
…・
…・
(4,
1
) こ こ で,h
はTYPE
I
が5,
TYPEll
が 15と して いる。
ま た
,U .
L .
定 式 化・
T.
L .
定 式 化 共に状態Ct
。)にお け る 座標系は,
円 座 標 系 (θ’ ,θ S )と し, 全体座標 系に っ い てはDescartes
座 標 系 (xi,
xs
) と』
し てい る。
な お,
アー
チの例に対し て は,一
軸 部 材に対 応す る よ う にボア ソ ン比 を 零 と して い る。TYPE
I
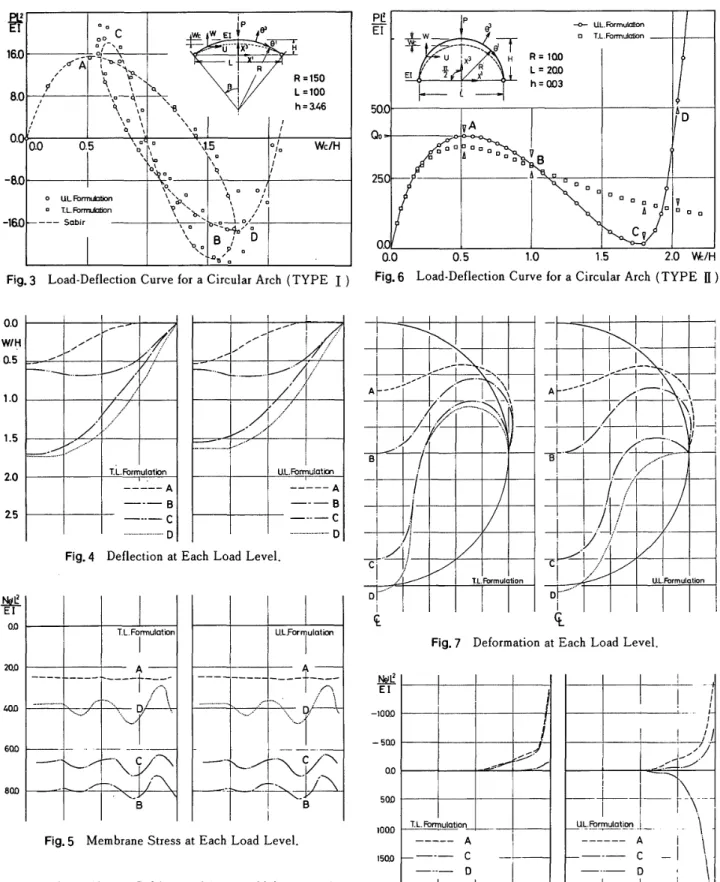
の荷 重 変 位 曲 線 をFig.
3・
に示す。
縦 軸は荷 重・
横 軸は中 央 点にお け る鉛 直変 位 Wc を示 し て おり, そ れ ぞ れ図中の値によ り無 次 元 化して いる。 破線はSabir
らに よ る有 限 要 素 法を用いた解H〕,
口で 示し た もの がT .L ,
定式化に基づ き求め た結果であり,
○で示 し た ものがU .
L .
定 式化に基づ き求め た結果で一 79 一
峇
160 Oo
C89−、。
。
’、
1均
ヒ諜
θ 鷙一
.
・
・
一
.
購r一
7 、丶》
“
1 ao、
σ「
Aノ
ノ
’ 戸一
’
凝
’
罫
一
」
、
し
、
・
』
◇ L q\
葭 R=150 し=
100’
’
气 丶、
。
、
唱、
h=
3脇6’
! 、丶
、ロ
、 o」
\。
1
’
「
aOO O、
5’
8 ゜
、
’
05・
,L
Wc!H 、、
鳩
■
’ロ
丶
9
1
一
ao囗
よ O Uし Fbm 麟 o【
o 工し.
Rコ
π
刑
on−一
一
Sobir ←、
。
い、°
q以
山
計
O ノ「
o一
160 、°魑
唾〆
\
。
Bp ノ o、
P/
u巳
iFig
.
3 Load−
Deflecしion Curve fol a Circular Arch (TYPEI
;O
.
O O.
5 1,
0 1.
5 2.
O V吃ノHFig
.
6 Load−
Deflection Curve for a Circular Arch 〔TYPE ∬ )O
.
OWiHO.
5 1.
0 1,
5 20 25 OO 脚 4QO 6QO eaDFig
.
4Deflection
at Each LQad Level.
TLRDm 岨
ロ
tmI
.
目
一
齟
.
.
1.
「
一
.
/7
A_
_
_
_
↓一
_
__
F
臥1
ハ
1
、
・
F.
一
、
一 “
ト 丶_
.
一
一 1−.
−7
\
彰
へ1
冒
BHg
.
5 Me 皿brane StTess at Each Load Level.
ある。いず れの結果 も
Sabir
らの解によ く対 応して い る。
この場 合,
中 央 点の変 位が複雑な釣 合 経 路を示して い る が,
本論 文で は弧 長 法 を用い て い るた めに, 各 特 異 点の 通 過は か な り容易な もの と な っ て い る。
ま た,
各 荷 重 点 に おける鉛 直 変 位 分 布および材 軸方向応 力分 布を 示 し た もの が,Fig.
4,
Fig.5
で あ る が,T .
L .
定式化に よる もの とU.
L.
定式 化によ る もの との差は ほ と んどな い。
TYPEll
の荷重変 位曲 線をFig.
6に示す。
縦 軸・
横 軸はTYPE
I
の場 合と同じ である。
口で示 し たT.
L.
望響
一
loao一
5aoqo5GO lean15QO20QD 鬼Fig
.
7 Deformation at Each Load Level.
Fig8 Memb πane StTess at Each Load Level
.
定 式 化に よる結果は
,
単調 な耐力低 下を示す曲 線となっ て い るが,
○で示 し たU .
L .
定 式 化 に よ る もの はWc
/H
が 2付 近で再 び 耐 力が上 昇してい る。
また, 図 中に 示 すQ
。 はAustin
らに よっ て求め られ た座 屈 荷 重であ り9),
U.
L .
定 式 化に よる結果 と一
致してい る。
Fig.
7・
Fig.
8は各 荷 重 点における変 形 図および応 力 分 布 図 を 表一
80
一
し た もの で ある
。T ,
L .
定 式 化に よる変 形 図は,
中 央 部 分の 変 形の みが進 行して い くの に対し,U .
L.
定 式 化によるもの は全 体 的に変 形 が 進 行してい く様 子 が見ら れ る。
4.
2 球 形シェ ル 軸 対 称 問 題 とし て,
こ こ では中 央 集 中荷 重 を受け る周 辺 単 純 支 持の 球 形シェ ル を考え,
そ の挙 動 をT .
L .
定 式 化・
U.
L.
定 式 化に よ り追 跡し,
その結 果につ いて 比 較 検 討を行 う。 変位仮 定に用い た変位関 数は,
次のとお り である。
PR 1 〜1
’ ’ 征 0.
4 0.
2!
〆
μ〆
/
/α
A一
一
十一
、
欺緊
ll
厂飛
丶
’1
[ / 〆 ! ! ’ 1 ’ ぺ \
丶
丶 駄 、 丶 ’ ’ ’ ♂ ノ o 〆 o.
−
0、
2・
TL「brmu口 ゆn−一
一
Mg5⊂o[[.
肬 一畆
1
一
イ
0、
0 α5 tO \ 15〆
盟 H BFig
.
g Load・
Deflection Curve fer a Spherical Sheil 〔TYPED
WtHo
.
o 05 1.
O 1.
5 2.
o 2.
5 皿 Ehl−
o.
4一
a2 0.
O 0.
2 o.
4Fig
.
10 Deflection at Each Lead Level,
Fig
.
11 Membrane Stress at Each Load Level.
Au
一
罍
・・屮・in
・i
・詈
・
罍
躍・
(
.
θ I sh1 μ‘.
θL s’n μ・ガ
。血h
μ、 smh μ・万
)
・
・
・
・
…
鹽
鹽
…
一・
・
一・
…
(4噛2『
a)A
・一
毒
・β屮・・s21 ・
留
・
罍
・酬
… (i−
1・・摎
… si ・詈
)
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(4,2.b
) ・・i−
4学
1……………・
…・
…・
…・
…・
・
・
……・
(・.
2.
・) こ こ で,
nl は TYPEI
の 場 合5 とし,
TYPE
皿の 場 合を15とし て い る。
また,
T.
L.
定 式 化・U .L.
定 式 化 共に状 態C
〔。}における座 標 系は,
球 座 標 系 (θ 1 ,θ t ,θり と し,
全 体 座 標 系につ い て は円 筒 座 標 系 (X
X2
,XS
) とし て い る。 TYPEI
の荷 重 変 位 曲 線をFig.
9に示す。
縦 軸・
横 軸は荷 重および中 央 点の変 位 を 示して お り, そFig
.
12 Load・
Deflection Curve for a Spherical Shell(TYPE
m
[一
一
、
’
、
≒窃
鳧
“ z / B− /
「
.
醒
圓
転 転L−一齟一
L
「
τLFb舳
ul α圏
On19
躍
帯
ー
ヰ
寸
⊆ んノ
…
彪7
ノ
匡
Flg
。
13 Defermation at Each Load Level.
UL
,
角mulqtlon皿 EN
−
1.
00−
o.
75一
〇.
50一
〇.
25O.
00o.
25050o.
75 †.
oolUL
.
Fレmulo 電ion 1A
! 、 ( \ ノ ノ4
「
「
’
,
ノ 、→ 〒
丿
嫡
,
へ
_
卜
丶
髄
乙
丶
イf 〃 ’ ! 1
’
F
、
層
「
’ 「’ ’ 帽El
、 L 、 ’ ’ ! /L
:
4
菰 ’町
三三
1
’
7幽
1
1Fig
.
14 Membrane Stress at Eac」Load Level.
れ それ 図 中の 値 に より無 次 元 化 して い る
。
破 線 はMescall
に よる解であ り12),
口で示し たもの がT .
L .
定 式 化に基づ き求 めた結 果で あ り,
○で示 し た もの がU .
L .
定 式 化に基づき求めた結 果であ る。T .
L.
定 式化・
U .
L .
定 式 化いずれの結 果 もMescall
に よ る解と よ く 対 応して お り,
式 (4.
2 )で仮定し た変位関数の妥 当性 を示して い る。
また, 各 荷重点の変位 分 布・
応 力 分布をFig.
10, Fig.
11に示 す。 両 者の結 果は よ く一
致 してお り,
こ の程 度の変形 領域に おいて はどち ら の定 式 化に よっ て も 追 跡可能で あ る事を示して い る。TYPE
ll
の 荷 重変位曲線をFig.
12.
に示す。
縦 軸・
横 軸はTYPE
I
と同じで あ る。 口で示し たも の がT .
L .
定 式化,
○で示し た もの がU .
L.
定式 化に 基づ き 求 め た結果 で あ る。T .
L .
定 式 化によ る 結 果 は,
点A
以降収れ ん が極め て悪く な り, 点B
付近 で発散し は じ め た た め計 算 を打ち 切 っ て い る。一
方U ,
L .
定 式 化によ る結果 は点B
以 降も安 定し た解が得ら れている。
た だ し点D
か ら点E
に到る間,一
時 収れ ん が悪く な る が,Fig.
13に示す変形 図からも解る よ うに急 激に シェ ル の変 形が進も う と する ためで あり,
変 形 形 状が安 定し た形に な る と再び安定し た解が得ら れて いる。 ま た,
各 荷重 点にお け る応 力分布 をFig.
14に示す。
51
結 び 本 論 文では,U .
L .
定 式 化に モー
ド重ね合せ法を適 用し その定 式 過 程を示し, ま た簡 単な解 析モデル に対し 同 じ条件 (変 位 関 数お よびその項 数 等。
〉の もとで計 算 し たT .
L .
定 化に よる結 果と比 較・
検 討する事に より,
T .
L .
定式化で は挙 動 追 跡 が 困 難 とな る大 変 形 領 域に おい て もU .
L .
定 式 化に よる事に よ り挙 動 追 跡が可 能 と な る事を明ら かに し た。
ま た,
本論文で は, 軸対称問題お よび移動座 標 系 が 直 交座標系の場 合に限 定し論 じて き た が,
球形 シェ ル の分 岐 座 屈 後の非 軸 対 称 問 題 等の場 合に対 するU .L .
定式 化の適 用 方 法お よ び その有 効 性につ い ては その2
で報告 する予定であ る。 な お, 本論文に おける計算に は, 東京工業大学 情報 処一
82
一
理センタのHITAC
M−
200 H を使 用 し た。
AppendixI.
T.
L.
定 式 化につ い て,
i
)歪・
変 位 関係 式 T,
L.
定式化で は,
歪は次のよ うに定義さ れ る。2θ‘,
=
19ul
【m+
L 】− 19vl
[o, Qr 2e‘,=
u‘1
丿十UJIt十uな
1lUkl
丿
…・
……・
…・
…
(A・
1>し た がっ て
,
歪・
変位関係 式は2een
=
2 e乳十2 e膿』・
θ3・
……・
……・
……・
・
・
・
……・
…・
…
(A・
2)2e砦』
=
侮。
1。
1
。
+hi。
lfila
+応。
lklehi
。
},1
………一
(A・
3)2e2』
‘
椀軍1』15
十「万1』1
α一
(H窪「万o}λ
1
β十H2「万olx1α
)・
…
(A・
4)と表さ れ る
。
こ こで,
式 中の添 字はすべ て初 期 状 態C ゆ ,に お ける座 標 系 成 分であ る。 な お
,
仮定よ り
IAi
,1
。=−
iASDIs1
。・
・
−
IAI
。lila
,IAIll
,=
0…………・
(A・
5)Ii)応力
・
歪関係 式 T.
L.
定 式 化におい て,
応 力 と しては状 態C
【。,を 基 準と す る 2nd Piola−
Kirchhoffの応 力を用いるe SPt=
Edua・
e∫圦・
・
…・
…・
・
…………・
…・
…・
…………
(A・
6) こ こ で,
Eaf’
. は 式 (2.
12)と同 様であ る が,
この場合計 量 テン ソ ル等は状 態C[。〕の座 標 系成 分であ る。
jiD各 変 位 段 階にお け る 仮 想 仕事式 状 態C圃 に おける諸 量 (た だし,
T,
L.
定 式 化に基づ く場合 そ れ ら の諸量 は,
状態Cゆ に お け る座標系に対し て定 義さ れ る 値である。
)が既 知で ある場 合,状 態Ctm.
1 ,にお け る仮 想仕 事式 を考え る。
ffX
(is
・ ・i
,・1+AS ・・e}δ(1
・・ ”・Le
)+A… )dV−
ff
。
[(IP
‘1
・・
1+Ap‘>cr(1
・AdoJ
+A・‘) +(ictL
。1+Ac‘
]a(臨。
,+ ムβ』dS。一
蕉
[(1
ハ ・+A∫ ‘1
δ(1
・Aro
・+A・・) +(lm
♂ 』。
,+Amt )δ(協‘1
[。1+Afic)]dS。一
ん
[(1
∫ +AfS’ )aevrl,,・+A・t
) 十(lml3
』。1十Afn‘
つδ(協,llo
,
+4
β翔dCo耳
0…・
…………・
…・
一・
……
(A・
7) こ の式に,
式 (A・
2)一
(A・
6} を代入 し、
増分量に対す る3 次 以上の項 を無 視 する と,
伽
・・ }・磁 +1
・例・・δ(酬 画1
・)+ △ ・ tf 贓 亅・y−
∬
[“P・Lm
+4P ‘脚 ・+〔IM
‘1
,・,+ △M 脚 ・1d
乱覗
[〔1
ハ ・+Af ・ )・A・t
+〔1
皿 †△配 坤脚7
]dC・一
・……・
…・
・
・
……・
……・
…・
・
…
(A・
8) とな る。
こ こで,
Ae:s は次のよ うに表さ れ る。24e 壽β
=
AVale十AVnla十lvs
)a}co}AVtle一
トlvkl
β}ωIAVitl α+θ’