解 説 論 文
1.はじめに
アクチュエータとは回転運動,直線運動などを行うデバ イ ス の こ と で あ り,MEMS 技 術(Micro Electro Mechanical
System,半導体加工技術を用いた微小電気機械システム)に よる数十 μm ~ 1 mm の極めて小形のものから,電車の駆動 モータのような大形のものまで,用途に応じて様々な方式が 存在する(1).物理的動作を起こすアクチュエータは,現実世 界にはなくてはならないデバイスである.長らく,電磁モー タ,電磁ソレノイド,油圧シリンダ,空気圧シリンダなどが その主役を担ってきた.どんな場合も,できるだけ小形,軽 量で大きな力(加速度)や速度を出力できることが望まれる. また,用途によっては極めて高い位置決め精度を要求される. 効率や寿命も実用上重要である.こうした中で,小形,低速・ 高トルク,高制御性などが期待され,1980年頃から主に日本 で実用化開発が活発に行われたのが超音波モータである. 超音波モータは圧電素子で励振された超音波振動によって ロータやスライダをこすって動かす摩擦駆動のモータである(2). 従来の電磁形モータとは動作原理が異なるので,その特性も独 特のものとなる.超音波モータは,電磁形に比べて低速・高ト ルクのため,減速機なしの直接駆動アクチュエータとして利用 できる.剛性の高い制御系を構成でき,応答速度が速い.また, 減速機がないため,騒音が発生しない静粛なモータである.超 音波振動の励振には圧電現象を利用しており,巻き線がなく, 電磁モータに比べて電磁雑音の放射が少ない.一方,摩擦駆動 であるため,ロータは大きな予圧をかけてステータである振動 子に押し付けられており,超音波振動を停止すればすぐに摩擦 力による大きな制動がかかる.このことは,特別なブレーキ機 構や電力消費なしに位置を保持できることを意味し,システム 全体での消費電力量を抑制できる. 本稿では,超音波アクチュエータの代表として,摩擦駆動 の超音波モータの動作原理,期待される性能,回転形,リニ ア形などの代表的な構成方法,得られている性能,性能改善 のための方策などについて解説する.性能の考察を主とし, 構成法のバリエーションについては余り述べていない.また, 超音波音場の放射力や音響流を用いた非接触方式(3)について は割愛した.
2.超音波モータの原理
2.1 基本動作原理 往復運動である超音波振動からロータの一方向運動を得る には,振動の半周期分だけを取り出す機構が必要である.こ れを行うために図1 のように,駆動力の源となる振動と振動超音波アクチュエータ
Ultrasonic Actuators
中村健太郎
Kentaro NAKAMURA アブストラクト 超音波振動から直線運動や回転運動を得る超音波アクチュエータについて,摩擦駆動の超音波モータを 中心に,その原理と構成例,得られる特性について解説する.圧電セラミックス素子で発生した往復運動である振動 から一方向運動を得るための原理として,複合振動形と進行波形に分けて説明し,複合振動形を例に得られるべき性 能を論じる.また,それぞれの方式で直線運動を得る構成方法,回転運動を得る構成方法を具体的に紹介する.また, 効率や寿命を改善する最近の試みについても述べる. キーワード 超音波モータ,圧電セラミックス,摩擦,アクチュエータAbstract Ultrasonic actuators, their working principles, basic structures, and typical characteristics are described in this article, in which we focus on ultrasonic motors based on friction driving and piezoelectric transducers. Methods of generating unidirectional rotation/motion from ultrasonic vibrations are categorized into two groups: hybrid-vibration-type and traveling-wave-type methods. The expected performance of each hybrid-vibration type method is discussed using an electrical equivalent circuit model. This article also illustrates several practical configurations for both rotary and linear motions as well as a recent attempt to improve the efficiency and lifetime.
Key words Ultrasonic Motor, Piezoelectric Ceramics, Friction, Actuator
中村健太郎 正員:シニア会員 東京工業大学精密工学研究所 E-mail [email protected] Kentaro NAKAMURA, Senior Member, (Precision and Intelligence Laboratory, Tokyo Institute of Technology, Yokohama-shi, 226-8503 Japan) . 電子情報通信学会 基礎・境界ソサイエティ Fundamentals Review Vol.7 No.3 pp.249–255 2014年1月 ©電子情報通信学会 2014
方向が直交するもう一つの同期振動により,駆動力の伝達を 半周期ごとに断続させる.後者の振動がクラッチの役割をし ているわけである.二つの振動の位相差を反転すれば,回転 方向を逆転できる.別の見方をすると,直交する二つの振動 はだ円軌跡を描いており,このだ円軌道でロータを摩擦駆動 していることになる.大きな摩擦力を得るために,ロータを 振動子にばねで押し付けている.通常の摩擦材料の摩擦係数 は0.1 ~ 0.2程度であることが多いので,必要とする発生力の 5倍以上の力でロータを押し付ける必要がある.この押し付 け力のことを予圧と呼んでいる. 以上の動作を実現するのに,大きく分けて二つの方式が考 えられている.振動方向が直交する二つの振動モードを組み 合わせる方法と,進行波振動を用いる方法である.本稿では 前者を複合振動形,後者を進行波形と呼ぶことにしよう.ま ず,分かりやすい複合振動形によって,超音波モータの特性 を考えてゆくことにする. 2.2 複合振動形の原理 複合振動形で回転動作を実現するための代表的な構成法を 図2に示す(4),(5).棒のねじり振動と縦振動を組み合わせ,棒 の端部に押し付けたロータを回転させる.具体的には,図 3 に示すような,ねじり振動を発生する周方向分極圧電素子と, 縦振動を発生する厚み方向分極圧電素子を金属ブロックで挟 み,ボルト締めした振動子を用いる.この振動子の端部にロー タを押し付けた構造とする.電界を与えるとひずみを発生す るのが圧電現象であるが,圧電材料としては,専らチタン酸 ジルコン酸鉛(PZT)が用いられる.縦振動用素子は厚さ方向 に分極されており,厚さ方向のひずみを発生する.ねじり振 動を発生するには,周方向に分極されている必要があるので, 素子を一旦 4 ~ 8 個の扇形小片に分割し,そのそれぞれを分 極した後に円環形状に組み立て直すモザイク方式が採られ る.縦振動とねじり振動の位相差が90度になるように2種類 の素子を二相電源で駆動すると,接触面にだ円振動軌跡が得 られる.摩擦駆動面に垂直な縦振動成分により超音波周波数 で動的に予圧を変動させ,これに同期した,面に平行なねじ り振動成分の正の半周期を選択的に取り出してロータを一方 向に駆動していると理解することができる.この動作の様子 を超音波振動の1周期を4分割して図解したのが図4である. 2.3 動作モデルによる性能予測 図 5 に,発生力や速度の時間変化の模式図を示す.上段の 図はロータの縦振動により駆動面に垂直に働く力(動的予圧) fCである.縦振動により,振動子とロータの接触が断続する と考え,振動の1周期のうち,接触している時間(角度)を接 触角 φCと定義する.ロータはばねの力 FC(静的予圧:一定) で押し付けられているが,縦振動による動的予圧fCの時間平 均とばねによる静的予圧FCが平衡すると考えられる.中段の 図には,駆動力となるねじり振動の速度とロータ速度を示し ている.ロータの慣性が駆動周波数に比べて大きいので,ロー タ速度はほぼ一定となる.駆動面に平行に働くトルクの時間 変化を下段の図に示している.ねじり振動速度がロータ速 度よりも大きいときはロータを加速する正のトルクが発生す る.接触角の内で,ねじり振動速度よりもロータ速度が遅い 場合にはロータを減速する負のトルクが働く.この瞬時トル クの時間平均が出力トルクとして取り出される. この動作原理から,接触角を振動の半周期以下にすれば モータの効率が高くなると予測される.このことを等価回路
静的予圧(ばね)
駆動力と
なる振動
摩擦を制御
する振動
ロータ
振動子
回転方向
図1 超音波モータの動作原理 ロータ 縦 振 動 ねじり振動 ス テ ー タ ヘッド 縦 振 動 用 圧電素子 ボ ト ム ブ ロック ねじり振動 用圧電素子 ベアリング コイルばね 図 2 複合振動形による回転モータの構成例 分極方向 分極方向 縦振動PZT素子 ねじり振動PZT素子 ひずみ ひずみ 図 3 縦振動用圧電素子とねじり振動用圧電素子 ロータ ロータ速度 角変位 角速度 図 4 複合振動形モータの動作の様子 fC FC 0 0 0 t t t C 動的予圧縦振動 静的予圧ばね ロータ速度 ねじり振動速度 瞬時トルク 出力トルク 接触角 図 5 モータ動作時の各波形シミュレーションにより検証しよう.図 6 にねじり振動子, ロータ,摩擦をモデル化した電気等価回路を示す.回路の左 側が電気入力で,角周波数ωの正弦波電圧が印加されている. 圧電セラミックス素子は構造上,キャパシタであるので,そ の電気容量が Cdであり,その誘電体損が Rdである.振動の 機械共振周波数から離れた周波数では振動しないので,この キャパシタのみが電気端子に見えてくる.これは一般に制動 容量と呼ばれている.一方,圧電現象により印加電圧に比例 した応力と電荷に比例したひずみが生じる.この変換を仮想 的なトランスで表している.その巻き線比が図中の Aτであ る.ここでは,ねじり振動なので,電流 imに比例した角振動 速度Ωτが,電圧VTに比例したトルクτ0が生じると考え, m
i
A
(1) 0
V
T
A
(2) のように Aτを定義し,これをトルク係数と呼んでいる.こ こで着目すべきは,振動速度が電流に比例していることであ り,電磁形変換器では振動速度が電圧に比例することと逆に なっている.このことは超音波モータを制御する場合に基本 的な考え方になる.トルク係数から右側の回路は機械系であ り,振動角速度を電流に,トルクを電圧に対応させている. この枝で,lm,cm,rmの直列共振がねじり振動の機械共振を 表現している.インダクタは等価的な慣性モーメント,キャ パシタが等価的なねじり剛性(の逆数),抵抗が振動損を表す. 負荷としてロータがある.本来,ロータをその慣性モーメン トに対応する大きなインダクタで,負荷はそれと直列な抵抗 で表すべきであるが,駆動周波数に比較して慣性モーメント が大きく,回転角速度ΩRはほぼ一定と考えて,簡単のため, 大きさΩRの電流源で表現している.振動子とロータの間の 摩擦特性は図 7 右のようなクーロン摩擦モデルとし,ロータ と並列に接続している.ねじり振動による発生トルクの大き さが,摩擦力の限界値 μfcrを超えると滑りが生じることを 表している.ここで μ は摩擦係数であり,r はロータの有効 半径である.fcは,縦振動による動的な予圧であるので,ね じり振動に同期して図7 左のように変動している.摩擦特性 は,しきい値電圧が fcに応じて変化するツェナダイオードを 二つ互いに逆向きに直列接続した素子で置き換えることがで きる.この等価回路により解析した結果を図8 に示す.電気 入力に対するロータの機械出力の比を%で示している.電気 入力はねじり振動子に入る実効電力,機械出力はロータ速度 と出力トルクの積である.接触角が振動の 1 周期の 4 分の1 程度なら80 %程度の効率が得られている.この方式のモータ では,振動子からは断続して出力が取り出されるわけである が,接触制御が適切であれば効率の低下は少ないことが分か る.なお,ここでは接触を制御する縦振動に必要な電力は考 慮していない. 2.4 超音波振動子のエネルギー密度 前節の議論により,超音波モータでは,摩擦制御の動作状 態が良ければ,電気入力から機械出力への変換効率は高いこ とが分かった.超音波モータの潜在性能の魅力の一つは,圧 電振動子のエネルギー密度の高さにある(6).この大きなエネ ルギーを効率良く機械エネルギーに変換できれば,これまで にない高出力なアクチュエータが実現できる. ここで,圧電振動子の性能について考えてみる.最も単純 な振動子として,圧電セラミックスの方形単板による横効果 縦振動素子を例にとる.図9 のように,両面に電極を付けた 厚み方向分極された素子に長さが縦波の半波長となる周波数 の交流電圧を印加すると,長さ方向の縦振動を行う.素子中 央が振動の節となり,変位は0であるが,応力が最大になる. 圧電セラミックスはこのような繰り返し応力に対して,最大 で40 ~ 70 MPa までは機械的な破壊が起こらない.このとき の振動子先端の振動速度は 1 ~ 2 m/s であり,20 kHz でエネ ルギー密度を計算すると,60 W/cm3あるいは,7.5 kW/kg と 図 6 超音波振動から回転力を得る機構の電気等価回路 図 7 摩擦特性のモデル化 接触角 C (deg.) 効率 (%) 図 8 接触角と変換効率の計算結果v
分極 振動 振動分布 図 9 横効果縦振動素子高い値になる.もっとも,これは機械的破壊強度のみを考え たもので,実際には振動損による温度上昇が先に問題になり, 実用上のパワー密度はこれよりもずっと低い値になる.図10 に市販のボルト締め縦振動子の質量と許容入力電力の関係を プロットしたものを示す.1 kW/kg 程度の性能を有している ことが分かる.前述のように,モータとしたときに機械出力 に変換できる効率を 80 % とすれば,800 W/kg のモータを実 現できることになる.摩擦制御を行う縦振動系での電力消費 を考えて,この値が400 ~ 500 W/kgだとしても,ギヤを用い た電磁形モータよりも軽量化できる可能性がある.
3.複合振動形モータの実現例
3.1 回転形 回転形の構成法は前述した.直径 5 mm の小形のものから 直径 120 mm の大形のものまで試作されている(図 11).動作 周波数は20 ~ 40 kHzである.図12に直径と最大トルクの関 係を示すが,頑丈なボルト締め振動子の構造を有するので, 大出力モータに適しており,接着で製作した後述の進行波形 よりも大きなトルクが得られている.直径 5 mm のモータで 0.005 N・m,直径 120 mm で 40 N・m のトルクが得られてい る.薄形の進行波形は直径で比較すると不利であるが,棒形 の進行波形(7)は定在波形に近いトルクを有している. 3.2 リニア形 二つの振動を組み合わせる方式は,たわみ振動と縦振動の 組合せなどによりリニア形へも応用可能であり,小形のもの から大形のものまで試作されている.一次縦振動と二次たわ み振動の組合せによるものが多数提案されている.図13は方 形振動子を利用したものの振動モードと基本構成を示してい る.積層構造とし,縦振動とたわみ振動の電極を独立にして 制御性を向上するとともに,電極形状の最適化が行われてい る(8).長さ30 mmの振動子で推力10 N程度が得られる.また, 同様な振動モードの組合せでも,ボルト締め振動子構造とし て高出力化したものもある.例えば,直径 40 mmのボルト締 め振動子で最大推力 100 N,無負荷速度 500 mm/sが実現され ている(9).4.進行波形モータの原理と実現例
4.1 回転形 弾性体の振動では,縦波と横波が結合し,二つの直交する 0 500 1000 1500 2000 2500 0 500 1000 1500 2000 2500 3000 重量 (g) 最大電気入力 (W ) 図 10 ボルト締め振動子の重量と最大入力電力 図 11 複合振動形回転モータの試作例 0.001 0.01 0.1 1 10 100 1 10 100 1000 Ma x. T or que (N m ) (★) 直径(mm) 最大ト ル ク (N m ) 図 12 回転形超音波モータの直径と最大 トルクの関係 ●は複合振動子形超音波 モータ,▲は進行波形超音波モータ(★印 はボルト締め棒形状のもの),○はDCサー ボモータ,□はACサーボモータ. 図 13 縦一次たわみ二次振動を用いたリニアモータB2 electrodes
L1 electrode
Thickness of each layer : 160 m (24 layers ) + -+ -+
-B2 electrodes
L1 electrode
Thickness of each layer : 160 m (24 layers ) + -+ -+ -縦1次用電極 たわみ2次用電極 各層の厚さ:160 m 全24層 図 14 図 13 のリニアモータの電極形状と配置
振動成分を有する場合が多い.進行波の場合,これら直交成 分間には90度の位相差があり,弾性体表面の点は超音波周波 数でだ円軌跡を描く.このだ円振動によってロータを摩擦駆 動するのが進行波形である.回転形を実現するためには,円 環や円板の振動を利用する(10).この場合,図 15 のようにア ルミニウムなどの金属円環や円板に円環状の圧電セラミック ス素子を接着したものをステータ振動子とする.この圧電素 子の表面電極は分割されており,図のように90度位相差のあ る電圧を印加する.こうして,空間的にも時間的にも90度ず れた二つの縮退した定在波振動を励振すると,円環上の角度 θ,時間tにおける振動変位 μ(θ, t )は,二つの定在波の重 ね合わせにより,次式のように進行波となる.
)
cos(
sin
sin
cos
cos
)
,
(
t
n
A
t
n
A
t
n
A
t
u
(3) ここで,nは振動の次数,Aは振幅値である.これは擬似的 な進行波ということもできるが,駆動周波数の 1/n でモード 形状がそのまま回転するように見えるので,「モード回転形」 とも呼ばれている.図では四相平衡給電となっているが,市 販品では電極位置をずらして,二相不平衡給電としている. 30~ 60 kHz 程度で動作するものが多い.この方式は,カメ ラの自動焦点合わせで実用化されている.円環形,薄形など, 従来の電磁モータでは設計しにくい形状のモータを実現でき る.振動子の接触面に直径方向に切込みを入れたくし歯を有 しており,この部分の運動によって振動振幅の拡大を行って いる.この機構は,力が大きく変位の小さい振動子とその負 荷であるロータの摩擦駆動部との機械的なインピーダンス整 合を行って,振動子を効率の高い領域で動作させるものであ ると見ることもできる. この方式のモータの定格出力を電磁形モータと比較したも のを図 16 に示す.同じ重量で電磁形モータに比較対象がな かったので直接の比較はできないが,DCサーボモータの100 W/kgの直線を外挿すると,超音波モータはそれよりも小さな 値を示している.しかし,電磁形モータでは小形化すると急 激に効率が低下することを考慮すると,小形の領域では超音 波モータのほうが有利になる可能性が高い.なお,先に述べ た振動子の性能はまだ十分反映できていないことが分かる. 次に,重量について出力トルクを比べたものを図17 に示す. このように出力トルクで比較すると,現状でも超音波モータ が有利である. 4.2 リニア形 図18に示すように,金属棒にたわみ振動進行波を励振する と,棒の表面ではだ円振動軌跡が生じる.すなわち,振動方 向が棒の長手方向に垂直な横振動成分と長手方向の縦振動成 分が存在し,それらは互いに90度の位相差を有している.こ こにスライダを押し付けると,摩擦力によってだ円軌跡の回 転方向に駆動力が生じる.たわみ振動の場合,このだ円軌跡 の回転方向は振動の伝搬方向と逆向きになるので,スライダ の移動方向は進行波の伝搬方向と逆になる.進行波の進行方 向を反転すれば,スライダの移動方向も反転する.定在波に なっている場合は,二つの直交する振動成分の間の位相差が 0の直線振動軌跡となるので,スライダは移動しない. 進行波の発生は,金属棒の片端から圧電振動子で振動を励 振すると同時に,反対側の端部において,同様の振動子によっ て振動を吸収し,無反射終端とすることで行う(11),(12).終端 側では,振動子で振動を電気エネルギーに変換し,それを電 気抵抗で消散することで無反射とする.このエネルギーを駆 動側に還流できれば効率が向上する.これまでに,6 mm角, ロータ ステータ 予圧 ステータ 振動子 圧電素子 sint cost - cost - sint 定在波1 - cost sint - sint cost sint 定在波2 ロータ 摩擦駆動 予圧 cost 圧電素子への電圧の印加のパターン 進行波 表面粒子のだ円振動軌跡 図 15 進行波形による回転モータの構造と進行波励振 1000 100W/100g1kW/kg
100g
力 (W) 10 DC Servo Motor 定格出 力 1 USM 10W/100g 進行波形市販品 100 W/kg 1 0.01 0.1 1 10 重量 (kg) 図 16 進行波形回転モータの重量と定格出力 ) 100 ル ク (Nm ) 1 10 出力ト ル 0.1 1 USM DC Servo Motor 0.01 0 01 0 1 1 10 進行波形市販品 重量 (kg) 0.01 0.1 1 10 図 17 進行波形回転モータの重量と出力トルク L RL スライダ たわみ振動棒 振動子1 (励振) 振動子2 (吸収) 電気的終端 xL 図 18 進行波形リニアモータの構成長さ約 600 mm のアルミニウム棒に 27 kHz の振動を伝搬させ て,速度1 m/s,最大推力数N程度が実現されている. 圧電結晶であるニオブ酸リチウムの基板に,くし形電極に よって 10 MHz 程度の弾性表面波を発生させ,これによって スライダを駆動する小形リニアモータの研究も進められてい る(13).
5.性能改善の方策
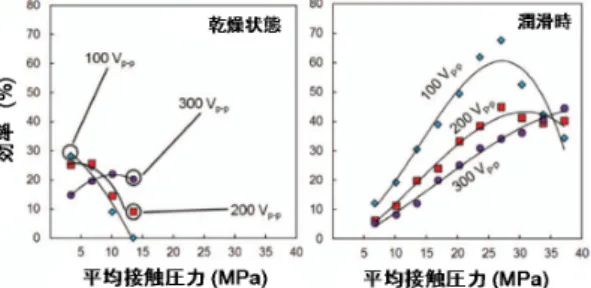
これまで検討してきたように,圧電振動子の発生エネル ギーを効率良く運動に変換できれば,超音波モータは高い効 率を示すが,現在実現されている多くの超音波モータの効率 は50 %以下である.これは,摩擦力の制御が理想的ではなく, 不要な摩擦損が大きいためである.複合振動形では,クラッ チの役割が十分ではなく,接触すべきでない瞬間にも接触し 続けているためと考えられる.これを改善するために,クラッ チの役割を行う縦振動系の設計を見直すことや(14),振動で摩 擦力を制御することを諦めて,電界で粘性が変化する液体を 利用する試み(15)などがあるが,余り大きな成果は得られてい ない. これに対し,潤滑油の性質が予圧や滑り速度で変化するこ とに着目した研究が行われている.自動車の無段変速機には トラクションオイルと呼ばれる潤滑油が駆動力伝達に利用さ れているが,その原理を応用しようとしたものである.具体 的には,図 7 左下のように,縦振動で動的な予圧が 0 になる まで変化しない場合でも,予圧が小さくなった瞬間には流体 潤滑により滑り,予圧が大きくなった瞬間には境界潤滑ない し弾性流体潤滑で駆動力を伝えようというものである.もし, このような動作が実現すれば,接触角がほぼ360 度の場合で も効率が改善されることが,等価回路解析から予測される. 図19に基礎的な実験結果を示す.潤滑油を用いた場合,ばね による予圧を大きくする必要があるが,乾燥状態では30 %程 度だった効率が60 %程度まで向上している.潤滑油を用いた 場合,動作安定性や寿命も改善される傾向にあり,現在,研 究が続けられている(16).6.まとめ
本稿では,超音波アクチュエータのうち,摩擦駆動の超音 波モータについて,その原理と性能について論じた.高速応 答,非磁性,静粛などの特性を生かして既に長く応用されて いる分野もあるが,更に広い応用展開には出力や寿命などで, もう一段階上の性能を実現する必要がある.新規磁石材料の 出現などにより電磁モータの性能も向上しているが,今後, ロボット用途などではより軽量で大きな出力のアクチュエー タが必要になるからである.また,cm オーダの小形リニア モータや数 mm オーダの回転モータなど,他の方式では実現 しにくい領域での展開も期待される.様々な振動モードの組 合せ方法についてはかなり研究が尽くされた感があるが,振 動子の最適化や支持方法などの課題は必ずしも十分解決され ていない.また,摩擦駆動面の研究は振動子の構成法に比べ ると研究がまだ少ない.最初の実用的な超音波モータに関す る論文(6)から既に30年が経過する.圧電超音波振動子の高い 性能を十分反映する超音波モータへの脱皮が待たれる. 文 献 (1) 精密制御用ニューアクチュエータ便覧 , 日本工業技術振興協 会固体アクチュエータ研究部会(編),フジ・テクノシステム, 東京, 1994.(2) S. Ueha, Ultrasonic Motors, -Theory and Applications, Oxford Press, New York, 1993.
(3) 小山大介, 中村健太郎, “非接触超音波アクチュエータ,”音響 誌, vol. 67, no. 2, pp. 75-80, 2011.
(4) M. Kurosawa and S. Ueha, “Hybrid transducer type ultrasonic motor,” IEEE Trans. Ultrason. Ferroelectr. Freq. Control., vol. 38, no. 2, pp. 89-92, 1991.
(5) K. Nakamura, M. Kurosawa, and S. Ueha, “Characteristics of a hybrid transducer-type ultrasonic motor,” IEEE Trans. Ultrason. Ferroelectr. Freq. Control., vol. 38, no. 3, pp. 188-193, 1991. (6) 指田年生, “超音波駆動モータの試作,”応用物理, vol.51, no.6,
pp. 713-720, 1982.
(7) M. Kurosawa, K. Nakamura, T. Okamoto, and S. Ueha, “An ultrasonic motor using bending vibration of a short cylinder,”IEEE Trans. Ultrason. Ferroelectr. Freq. Control., vol. 36, no. 5, pp. 517-521, 1989.
(8) M. Takano, K. Hirosaki, M. Takimoto, S. Ichimura, and K. Nakamura, “Improvements in controllability of ultrasonic linear motors by longitudinal-bending multilayered transducers with independent electrodes,” Jpn. J. Appl. Phys., vol. 50, no. 7, pp. 07HE25-1-6, 2011.
(9) C. Yun, T. Ishii, K. Nakamura, S. Ueha, and K. Akashi, “A high power ultrasonic linear motor using a longitudinal and bending hybrid bolt-clamped Langevin type transducer,” Jpn. J. Appl. Phys., vol. 40, part 1, no. 5B, pp.3773-3776, 2001.
(10) 超音波モータ/アクチュエータ,秋山勇治(編),トリケップス, 東京,1986.
(11) M. Kuribayashi, S. Ueha, and E. Mori, “Excitation conditions of flexural traveling waves for reversible ultrasonic linear motor,” J. Acoust. Soc. Am., vol. 77, no. 4, pp. 1431-1435, 1985.
(12) M. Kurosawa and S. Ueha,“High speed ultrasonic linear motor with high transmission efficiency,” Ultrasonics, vol. 27, no. 1, pp. 39-44, 1989.
(13) M. Kurosawa, M. Takahashi, and T. Higuchi, “Ultrasonic linear motor using surface acoustic wave,” IEEE Trans. Ultrason, Ferroelectr. Freq. Control., vol. 43, no.5, pp. 901-906, 1996. (14) J. Satonobu, D. K. Lee, K. Nakamura, and S. Ueha, “Improvement of
the longitudinal vibration system for the hybrid transducer ultrasonic motor,” IEEE Trans. Ultrason Ferroelectr. Freq. Control., vol. 47, no. 1, pp. 216-221, 2000.
(15) K. Nakamura, M. Maruyama, and S. Ueha, “A new ultrasonic motor using electro-rheological fluid and torsional vibration,”Ultrasonics, vol. 34, no.2, pp. 261-264, 1996.
(16) W. Qiu, Y. Mizuno, D. Koyama, and K. Nakamura, “Efficiency improvement of hybrid transducer-type ultrasonic motor using lubricant,” IEEE Trans. Ultrason. Ferroelectr. Freq. Control., vol. 60, no. 4, pp. 786-794, 2013.
(US研究会提案,平成25年10月21日受付 11月11日最終受付) 中村健太郎1987東工大・工・電気電子卒.1992 同大学院総合理(正員:シニア会員) 工学研究科博士課程了.博士(工学).現在,東工大・ 精密工学研究所・教授.パワー超音波応用技術,超 音波トランスデューサ,音場の光学的測定法,光ファ イバセンサの研究に従事.1998 年度本会論文賞(第 55回),2010 日刊工業新聞第 5 回モノづくり連携大賞 特別賞ほか各受賞.