奈良教育大学学術リポジトリNEAR
精神遅滞児の運動発達 −身体コントロール・調整 課題による分析−
著者 田辺 正友, 田村 浩子, 中川 貴明
雑誌名 奈良教育大学紀要. 人文・社会科学
巻 36
号 1
ページ 95‑105
発行年 1987‑11‑25
その他のタイトル Development of Motor Function in Mentally Retarded Children
URL http://hdl.handle.net/10105/2067
精神遅滞児の運動発達
‑身体コソトロール・調整課題による分析‑
田辺正友・田村浩子*・中川貴明**
(奈良教育大学障害児教育教室) (昭和62年4月30H受理)
問 題
子どもの成長や発達にとって、運動機能の発達は中枢的働きを意味し、運動機能の遅れや障害 は生活そのものを遅らせてしまうといわれている。精神遅滞児の運動撒能に遅れあるいは障害が 見られることは多くの研究で指摘されている(Bruininks, 1974 ;笠巻, 1972;小林・松瀬, 1984;
小宮, 1970; Malpass, 1963)。筆者らは、これまでに精神遅滞児の平衡性・敏捷件・巧ち性等 の運動機能の発達傾向(田辺, 1985)や歩行運動の発達傾向(田辺・田村・岡本, 1987)を明ら かにするとともに、運動機能・能力の発達にどのような要因が関与しているかについて検討し、
そこから精神遅滞児の運動機能の遅れのメカニズムを明らかにしようとして計画した‑一連の実験 的研究を行う中で、若干の示唆を得てきた。
また、こうした課題‑のとり組み方においても発達的特徴がみられることが明らかにされた0 設定した課題を 一つの運動動作にまとめあげていく過程をみていると、姿勢模倣の上肢・下肢課 題のような単純な反復動作は巧妙に遂行することができるが、姿勢模倣の協応課題や姿勢模倣課 題での姿勢の組み合わせから成る動作模倣課題のような複雑な動作では、まず上肢(あるいは下 肢)を模倣し次に下肢(上肢)を模倣するといった、いわば部分と部分の「たし算」の結果とし て達成される、あるいは、ほとんど動けないといった子どもがいた(田辺・田村・小出, 1986;
Lli辺・田村・桑田, 1986) そのようすをみていると、自己の身体のどの部分をどのように動か せばよいのかがわからないようにみえることがあった。要素動作の運動能力がそなわっていても、
それらを有機的に組み合わせて一つの運動動作にまとめあげていく過程には、自己の身体像の形 成や身体を意識的にコソトロールする力も深く関与しているものと考える。そこで、先の研究 (田辺・田村, 1987)では、運動発達と身体像の形成・確立との関連についての検討をおこなっ た。
本研究は、これまでの報告と同様に精神遅滞児の運動機能の遅れのメカニズムを明らかにして いく基礎資料をつみ上げるといった目的をもってなされているが、本稿では、これまでの報告の 結果をふまえて自己の身体のコソトロール・調整を必要とする運動課題を設定して、 (1) 2次元 形成期から3次元可逆操作期の精神遅滞児の身体コソトロール・調整能力の発達傾向を明らかに
L、 (2)これらの能力と言語機能の発達との関連についての検討を試みる。
* 現在、奈良教育大学大学院教育学研究科研究生
** 現IF三、奈良県立西の京養護学校
95
96 田辺正友・田村浩子・中川貴明
方 法
対象児 本研究は、奈良市N小学校および中学校障害児学級における発達診断活動の‑一環とし てなされたものであるが、本稿での対象児は、課題の性質上とくに四肢に顕著な麻痔のある児童・
生徒を除いた2次元形成期から3次元可逆操作期までの精神遅滞児26名で、その構成は、 Table 1 に示す通りである。なお、各対象児の操作特性は、新版K発達検査資料を主に、日常行動観察な どの諸結果も考慮しつつ、凹中(1977,1985)の可逆操作の高次化における「階層一段階」理論 にもとづいて決定された。
Table 】 対象児の構成
2 次 元 形 成 期 2 次 元 可 逆 操 作 期 3 次 元 形 成 期 3 次 元 可 逆 操 作 期 M e a n
D A
R a n g e
3 ‥5 I
4 :7 6 : 2 8 : 0
2 :8 ‑ 3 : 9 4 : 1 ‑ 5 : 5 : 4 ‑ ‥6 7 :7 ‑ 8 :6 M e a n
C A
R a n g e
1 3 : 1 0 1 4 : 7 1 3 : 1 0 1 3 ‥5
l l :l l ‑ 1 5 : 1 1 2 : 7 ‑ 1 6 : 0 1 0 ‥2 ‑ 1 7 : 0 1 2 : 8 ‑ 1 4 : 1
N 7 5 1 2 2
検査課題および実施・評価手続
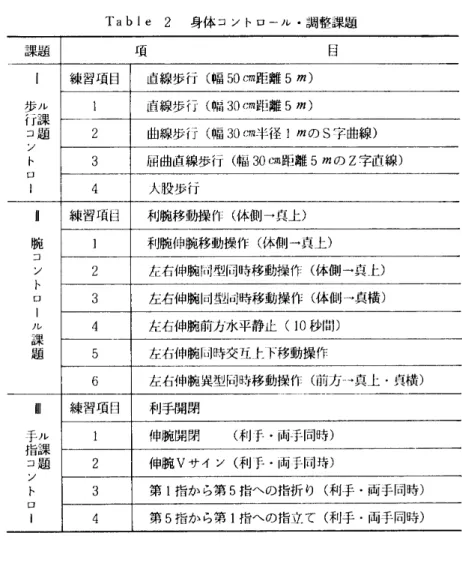
1)身体コソトロール・調整課題 身体コソトロール・調整課題は、全身、腕部、末端といっ た部位別の比較検討を試みるために、 I 歩行コソトロール・調整課題(4項目) 、 II 腕コ ソトロール・調整課題(6項目) 、 lIl 手指コソトロール・調整課題(4項目)を設定した。
課題の内容は、 Table 2に示す通りである。課題の実施に際しては、各課題ごとに練習課題を 設定し、練習課題を通過した後に本課題を実施した。課題遂行に関する言語教示の後に、まず、
検束者が各課堰を演示した。その後に、対象児が各課題を実施するよう求められたo なお、こ れらの課題は、すべての対象児に対して一定の順序で実施された。各課題は、それぞれ2回ず つ実施することとしたが1回日の試行で後述するA評価を得た児には1回のみとした。
評価は、各課題・項目とも、 A‑ 「IE確にできる工 B‑ 「l‑F確さにやや欠ける」、 C‑ Til一 確さに大きく欠ける」、 D‑ 「できない」の4段階としたC/ 4段階の評価基準の詳細は、 Table
3に示す通りである。なお、評価は、課題遂行時に検査者と観察者1名とがそれぞれ個々に行 ない、合せて、対象児の課題遂行のようすがVTRにより録痢された。
2) 言語発達の評価 言語発達の実態を把握するために、 Illinois Test of Psycholinguistic Abilities(ITPA)を全対象児に実施し、言語学習年齢(PLA)を算出した。実施方法および評 価手続は、三木ら(1973)のITPAの手引書に従った。
Table 2 身体コントロール・調整課題
課題 項 目
I 歩ル
行課 コ題 ン′
ト ロ I
練習項目 直線歩行 (幅 50 cm 距離 5 m ) 1 直線歩行 (幅 30 cm 距離 5 m )
2 曲線歩行 (幅 30 cm 半径 1 m のS 字曲線) 3 屈曲直線歩行 (幅 30 cm 距離 5 m の Z 字直線)
4 大股歩行
∬ 腕 コ ン ト ロ I ノレ 課 題
練習項目 利腕移動操作 (体側 →真上) 1 利腕伸腕移動操作 (体側→真上)
2 左右伸腕同型同時移動操作 (体側 →真上) 3 左右伸腕同型同時移動操作 (体側→貞構) 4 左右伸腕前方水平静止 ( 10 秒間)
5 左右伸腕同時交互上下移動操作
6 左右伸腕異型同時移動操作 (前方一→真上 . 真横)
Ⅷ 手ル 指課 コ題 ン
ト ロ I
練習項目 利手開閉
1 伸腕開閉 (利 手 .両手同時) 2 伸腕 Ⅴサイン (利手 .両手同時)
3 第 1 指か ら第 5 指への指折 り (利手 .両手同時) 4 第 5 指から第 1 指への指立て (利手 . 両手同時)
結 果 と 考 察 1 身体コントロール・調整能力の発達
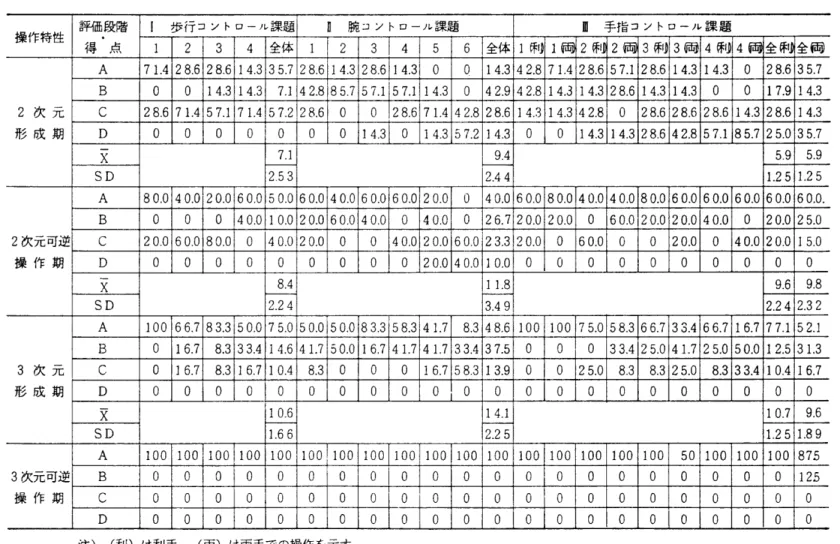
操作特性段階ごとに、歩行、腕、手指各課越・項目別の評価段階(A‑D)別人数を求めてそ の比率を示したものが、 Table4である(,また、 Table4 <再こはA、 B、 C、 Dの評価をそれぞ れ3、 2、 1、 0と得点化して、各操作特性段階ごとに平均得点を求めた結果を合わせて示したo 身体コソトロール・調整能力の発達傾向についての検討を試みるが、本研究での3次ノ亡HJ逆操作 期の該当児は2名であり、また、 Table4から明らかなように、手指の「第1指から第5指‑の 指折り(両手) 」課題を除く総ての課題・項目においてA評価が得られているので、以ト、 2次 元形成期から3次元形成期の24名を対象とした分析を試みる。
まず、歩行、腕、手指それぞれの課題における操作特性別平均得点(全体欄)を分散分析した 結果、 3課題ともその得点は、 2次元形成期から3次元形成期までの操作特性の高次化にともなっ
98 tH辺LF.友・田村浩f・・中川貴明 Tab】e 3 身体コントロール調整課題の評価基準
課題 項 目 評 価 基 準
A 規定線 内を一定 の リズ ムで歩 行で きる
∫ 1 2 3
B 規定線 内を歩 行で きるが リズムの乱れ があ る C .規定線 外へ少 し踏 み出す
D で きない
4
A ‑ 一 定の リズムで大股歩 行で きる B 大股 歩 行はで きるが リズ ムの乱 れがあ る C 自然 歩 行と変 化が ほとん どみ られな い D で きな い
五 1
A 指先 まで腕 を伸 ば し真上 まで あげる ことがで きる
ち 真上 まで腕を あげ るこ とはで きるが指 先 まで伸 びず腕 が曲 る C 真上 まで腕を あげに くい
D で きない 2
3 6
A 指先 まで腕 を伸ば し左右 の腕 を同型 または異型 に同時操 作で きる ら 同時操 作はで きるが指先 まで伸 びず腕 が曲が る
C 同時操 作がで きず 片腕 ず つの操 作で ある D で きない
4
A 指 先 まで腕 を伸ば し 10 秒間静止 で きる B 10 秒間静止 で きるが指先 まで伸 びず腕 が曲 る C 3 , 4 秒間の 静止で あ る
D で きな い
5
A 指先 まで腕 を伸 ば し左 右の腕 を同時 に交互 に上 下操 作で きる B 左右 の腕を同時 に交互 に上下操作で き るが指先 まで伸 びず腕 が曲が る C 左右 の腕 を同時 に交互 に上下操作で きず片腕ず つの操 作で ある D で きない
Ⅲ 1
2 刺
辛
A 腕 を伸ば して開閉 また はⅤサイ ンがで き る B 開 閉 または、′サ イ ンはで きるが腕が曲 が る C 開 閉 または V サ イ ンが不完 全であ る D で きな い
両
辛
A 腕 を伸ば して両手同時 に開閉 または Ⅴサ イ ンがで き る B 両手 同時 に開閉 また は V サ イ ンはで きるが腕 が曲 がる C 両手 同時 にはで きず片手 ずつの開片 また はⅤサ イ ンで あ る D で きない
3
4 刺
辛
A 順 序 をお って指折 りまたは指立 てが で きる B 先 に折 ったまた は立 った指 につ られ て次の指 が動 く C 何本か の指 が まとま って折 れ るまた は立 つ
D で きない 両
手
A 両手 同時 に順 序を お って指折 りまた は指立 てがで き る
B 両手 同時 にはで きるが先 に折 ったまた は立 った指 につ られ て次の指 が動 く C 両手 同時 にはで きず片 手ずつの指折 りまた は指立 てであ る
D で きない
て有意なi‑nを′Jミした(歩行課題: F‑5.86、腕課題: F‑6.36、手指課題:利手‑F‑19.85、
両手‑F‑7.71 ;いずれも、 df‑2/21、 P< .01) さらに、 Ryan法によって各操Y招紳捕りの 平均得点の差を検定したところ、歩行課題では2次元可逆授作期と3次元形成期との問に(∫‑2.10、
P<.05) 、手指課題では2次元形成期と2次元 可逆操作との間に(利手:f‑3.90、両手*‑3.39;
いずれも、 P<.01)有意差が認められ、急激な ‑ttを示す時親が課題によってことなることが 示されたO さらに、腕課題では各操Y両津†三間には有意差はみられず、 2次元形成期から3次ノ亡形 成期にかけてゆるやかなl二好が示されたo このように、いずれの部位のコソトロール・調教能力 も全体的傾向としては、発達の高次化にともなって巧ち性が増すが、その発達様棚は部位によっ て異なることが示されたo
通過率(評価AとBを得た児数のh'分率)でみると、歩行課題は2次元形成期および2次元Ht 逆操作期では45‑60%の通過率であるが、 3次元形成期に至って約90%と急上昇を′J‑tす f‑i旨.課 題は2次元形成期では50%であるが、 2次元HJ逆操作期および3次元形成期では80‑90%の通過 率を示すにいたる。,腕課題は2次元形成期から3次元形成期まで、およそ60‑ノ85%範囲内の通過 率がみられる。 3課題を適してみた場合、 2次j亡形成期ではその通過率は約50%であり、評価r)
「できない」の児もみられるが、 3次元形成期に乍ってすべての課題において83%以上の通過率 を示し、評価Dの児もみられなくなるo 全体的にみて、 3次元形成期の段階で本研究での全牒題 がほぼ達成されるといえる。しかし、各課題内の項目によってその通過率のメモがみられるo そこ で各課越ごとの項目別に分析を試みたいし,
歩行課題では、全項Hを通して評価D 「規定線外‑大きく踏み出す」あるいは「rI然歩行と変 らない」の児はいなかった。 「直線歩行(30cm幅) 」課題では2次)亡形成期の段階でも70%以上、
3次元形成期では対象児全員が評価Aであったo Lかし、 「曲線歩行」 「屈曲直線歩行」および
「大股歩行」課題は2次元形成期では困難な課題のようであって、大半の児が評価Cであった。
曲線および屈曲直線歩行課題は2次元可逆操fFSHでもはば同様の結果であるが、大股歩行課題は 2次元可逆操作期の全員が評価AあるいはBであって、ほぼこの課題が達成されている。曲線・
屈曲直線課題と大股歩行課題とを比較すると、前器の課題では自己の身体のコソトロ一一ルに加え て視覚との脇応によるコソトロールを必要とし、この操作特性段階においては、より困難な課題 であったと推察されるo Lかし、 3次元形成期に至ってすべての項Hにおいて83%から100%の 範囲内での通過率が示されるようになる。
ここで、歩行運動について検討した先の研究(田辺・M村・岡本、 1987)との比較から、直線 歩行時の「視線の据え方」の問題について論究しておきたい。先の研究では、歩行運動を自然躯 行時のリズム、姿勢、手と足の協応、つま先の向きの4側癖から分析したものであって、今回の 分析視点とは異なり直接的な比較はできないが、そこでは、 1次元可逆操作期および2次元形成 期の児にあっては「リズムが乱れる」ものが大半を占めたが、この操作特性段階でも全員がrH 標地点までまっすぐ歩く」ことが‖J能であるとの結果を得た。先の研究では、 7mの距離の対Ifri
l二に検査者と検査補助者が立ち、その間を自然歩行することが求められたものである。今川ま、
幅30cmI勺の規定条件下での歩行であって、 2次ノ亡形成期および2次元HJ逆操作期の対象児でも規 定線外‑踏み出し、まっすぐ歩行できない児がみられた。今Lr.Iの課題で評価AあるいはBを得た 児の歩行のしかたが規定線をあまり気にすることなく、目標地点に「視線を据えて」のものであっ たのに対して、評価Cの児の歩行は規定線を意識しすぎて自分の足元をみての躯行であって、結 果的に線外‑踏み出すといった様子が観察された。
Table 4 身体コントロール・調懲課題・項目こ'との評価段階別比率(形)および平均得点
操 作 特 性
評 価 段 階
得 点
l 歩 行 コ ン ト ロ ー ル 課 題 Ⅲ 腕 コ ン ト ロ ー ル 課 題 Ⅲ 手 指 コ ン ト ロ ー ル 課 題
1 9 3 4 全 体 1 2 3 4 5 6 全 体 1 利 一 1 2 m 2 3 刷 3 4 利 > 4 岡 全 酔 全 l両
2 次 元
形 成 期
A 7 1 .4 2 8 .6 2 8 .6 1 4 .3 z s ri 2 8 .6 1 4 .3 2 8 .6 1 4 .3 0 0 1 4 .3 4 2 .8 7 1 .4 2 8 .6 5 7 .1 2 8 .6 1 4 .3 1 4 .3 0 2 8 .6 3 5 .7 B 0 0 1 4 .3 1 4 .3 7 .1 4 2 .8 8 5 .7 5 7 .1L5 7 .1 1 4 .3 0 4 2 .9 4 2 .8 1 4 .3 1 4 .3 2 8 .6 1 4 .3 1 4 .3 0 0 l
1 7 .9 1 4 .3 C 2 8 .6 7 1 .4 5 7 .1 7 1 .4 5 7 .2 2 8 .6 0 0 2 8 .6 7 1 .4 4 2 .8 2 8 .6 1 4 .3 1 4 .3 4 2 .8 0 2 8 .6 2 8 .6 2 8 .6 1 4 .3 2 8 .6 1 4 .3
D 0 0 0 0 0 0 0 1 4 .3 0 1 4 .3 5 7 .2 1 4 .3 0 0 1 4 .3 1 4 .3 2 8 .6 4 2 .8 5 7 .1 8 5 .7 2 5 .0 3 5 .7
貢 7 一1 9 .4 5 .9 5 .9
S D 2 .5 3 2 .4 4 1 .2 5 1 .2 5
2 次 元 可 逆
操 作 期
A 8 0 .0 4 0 .0 2 0 .0 6 0 .0 5 0 .0 6 0 .0 4 0 .0 6 0 .0 6 0 .0 2 0 .0 0 4 0 .0 6 0 .0 8 0 .0 4 0 .0 4 0 .0 8 0 .0 6 0 .0 6 0 .0 6 0 .0 6 0 .0 6 0 .0 . B 0 0 0 4 0 .0 1 0 .0 2 0 .0 6 0 .0 4 0 .0 0 4 0 .0 0 2 6 .7 2 0 .0 2 0 .0 0 6 0 .0 2 0 .0 2 0 .0 4 0 .0 0 2 0 .0 2 5 .0 C 2 0 .0 6 0 .0 8 0 .0 0 4 0 .0 2 0 .0 0 0 4 0 .0 2 0 .0 6 0 .0 2 3 .3 2 0 .0 0 6 0 .0 0 0 2 0 .0 0 4 0 .0 2 0 .0 1 5 .0
D 0 0 0 0 0 0 0 0 0 2 0 .0 4 0 .0 1 0 .0 0 0 0 0 0 0 0 0 0 0
X 8 .4 l l .8 9 .6 9 .8
S D 2 .2 4 3 .4 9 2 .2 4 2 .3 2
3 次 元
形 成 期
A 1 0 0 6 6 .7 8 3 .3 5 0 .0 7 5 .0 5 0 .0 5 0 .0 8 3 .3I
5 8 .3 4 1 .7 8 .3 4 8 .6 1 0 0 1 0 0 7 5 .0 5 8 .3 6 6 .7 3 3 .4 6 6 .7 1 6 .7 7 7 .1 5 2 .1 B 0 1 6 .7 8 .3 3 3 .4 1 4 .6 4 1 .7 5 0 .0 1 6 .7 4 1 .7 4 1 .7 3 3 .4 3 7 .5 0 0 0 3 3 .4 2 5 .0 4 1 .7 2 5 .0 5 0 .0 1 2 .5 3 1 .3 C 0 6 .7 8 .3 1 6 .7 1 0 .4 8 ‑3 0 0 0 1 6 .7 5 8 .3 1 3 .9 0 0 2 5 .0 8 .3 8 .3 2 5 .0 8 .3 3 3 .4 1 0 .4 1 6 .7
D 0 0 0 0 0 0 0 0 0 0 o 0 0 0 0 0 0 0 0 0 0 0
文 1 0 .6 1 4 .1 1 0 .7 9 .6
S D 1 .6 6 2 .2 5 1 .2 5 1 .8 9
3 次 元 可 逆
操 作 期
A 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 0 0 5 0 1 0 0 1 0 0 1 0 0 8 7 5
B 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 2 5
C 0 0 0 0 0 0 0 0 0 ‑ 0 0 0 0 0 0 0 0 0 0 0 0 0
D 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
荏) (刺)は利手、 (両)は両手での操作を示す。
100
U l i Z Z I E 針
・ ヨ サ ー 薄 f
‑ ・
+
柵 w
これまでの研究でも、 「歩行」といったきわめて日常的な運動動作においても、精神遅滞児に は遅れ、あるいは、歩行時の姿勢の悪さや歩行パターソの特徴などの種々の問題がみられること が報告されている(池田・岡崎・l廿上1980;上林・池田、 1985;小柱ほか、 1976・1977;森卜・
藤田、 1985・1986) 筆者らは先の研究に.Jいて、歩行運動時の「視線の据え方」の発達的変化 について考察したが、歩行といった運動動作に歩行時の「視線の据え方」が重要な役割を果たし てしることが本研究からもうかがえるものである。また、先の研究で歩行の確立は一一1‑・連の運動発 達過程の中でもとくに大きな意義をもつものであり、歩行時の運動パターーソや姿勢が広く他の運 動機能の発達に影響をおよぼしていることを明らかにしたが、寺川ら(1976)も「開眼両足立ち」
の課題のように「じっと立つ」という自己の体に対する静的コソトロールが要求される課題がで きるかどうかに、この「視線の据え方」が深くかかわっていると指摘している。
腕課題では、項目2、 3の体側から真上あるいは真横‑の「左右伸腕同型同時移動操作」にお いては、 2次元形成期の1名のD評価を除く全対象児が評価AあるいはBであって、左右の腕を 同型同時にコソトロールする力はほぼ達成されている。項目1の「利腕仲腕移動操作」でもほぼ 同様の結果が得られているが、項目1と2の比較から左右両腕の操作では評価Cの児がみられな かったのに対して、利腕のみのコントロールでは評価Cの児が全操作特性段階を通してみられた。
この帆句は、後述する手指課題の口中腕開閉J 「伸腕Ⅴサイソ」でのとくに2次元形成期および 2次元可逆操作期の対象児においてもみられるものである。低次の操作特性段階では両手・両腕 の圭鮮トの万が容易であるという傾向が、他の課題においても示されるものかどうか検討を要する 問題である。項目5の「左右仲腕同時交庄上下移動操作」は、 2次元形成期では困難な課題であっ て、評価Aを得た児はなく、 85%のものが評価CあるいはDであった。 2次元可逆操作期で評価 AあるいはBの児が約半数となり、 3次元形成期になってほぼこの課題を達成するに至るようで ある。項目6のr左右伸腕異型同時移動操作」は、項目5よりさらに困難な課題で、 2次元形成 朋および2次元可逆操作期では対象児全員が評価CあるいはDであって、 3次元形成期で評価A ・
Bのものが40%程度を示すといった結果であったO
ここで、同型同時移動操作と異型同時移動・同時交互移動操作との課題遂行についての比較を 試みておく 項目2、 3では評価Cの児はみられなかったが項目5、 6では3次元形成期の対象 児にも評価CのものがみられたO 左右異型あるいは交互移動操作課題では、評価Cつまり右腕と 左腕の操作が同時にできる(同時操作)のではなく、まず右腕(あるいは左腕)を操作し、次に、
左腕(右腕)を操作するといった、いわば部分と部分の「たし算」の結果として達成されたもの がみられるのである。右腕と左腕を同型にコソトロールする力は2次元形成期の段階でほぼ達成 されているが、左右の腕を異型あるいは交互に同時にコソトロールする力は2次元形成期あるい は2次元可逆操作期では国難なようである。この結果は、姿勢・動作模倣課題による分析を試み た前報告(田辺・「碑・f・小出、 1986)の結果とも‑一致するものである。項目4の「左右仲腕前方 水平静正」では、 2次元形成期および2次元可逆操作期では30‑40%の児に評価C 「3‑4秒し か静正できない」がみられる。 3次元形成期では対象児全員が評価A ・ Bで、この課題がほぼ達 成されている。 2次元形成期および2次元可逆操作期においては先の「左右伸腕同型同時移動操 作」よりも若干榊難な課題のようであるD この「左右仲腕前方水平静Ik」は腕課題での他の項目 が動的な自己の身体のコソトロールを必要とする課題であるのに対して、静的なコソトロールを 必要とする課題である。,低次の操作特性段階の精神遅滞児にとって、静的に「〜シソヅケル」と いったコソトロール能力はより困難なもののようである。
102 田辺lE友・田村浩子・中川貴明
最後に、手指課題の分析を試みる。項目1の「仲腕開閉」では2次元形成期と2次元可逆操作 期の1名ずつに評価C 「開閉が不完全」の児がみられるが、 3次元形成期では対象児全員が評価
A 「腕を伸ばして開閉できる」であった。この伸腕開閉において、 2次元形成期および2次元可 逆操作期の段階では利手だけの操作よりも両手の同時操作の方がやや通過率が高いといった傾向 がみられたが、項目2の「伸腕Ⅴサイソ」ではこの傾向が顕著に示された。両手での操作では2 次元形成期の1名の評価Dと3次元形成期の1名の評価C以外は、全員評価AあるいはBであっ たが、利手のみの操作では、 2次元形成期・ 2次元可逆操作期では40%の、 3次元形成期で75%
の通過率であった。しかし、項目3の「第1指から第5指‑の指折り」および項目4の「第5指 から第1指‑の指立て」では、利手のみの操作の方が優位であった。先の腕課題での結果とも合 せて考えると、低次の操作特性段階で示された両手・両腕同時操作の優位性は、比較的操作が簡 単な課題においてみられる憤向といえるようである。
「指折り」 「指立て」とも2次元形成期ではそのコントロールが困難であり、ほとんどの児が 評価CあるいはDであった。 2次元可逆操作期では、両手同時操作の場合には若干の児に評価C がみられるが、利手のみの操作では全員が評価A・Bであった。 「指折り」と「指立て」とを比 較すると2次元形成期および2次元可逆操作期の段階では「指立て」の方が若干の困難性を示す が、 3次元形成期では両項「川田こほとんど差はなくなる傾向がみられる。しかし、この操作特性 段階でもこれらの項目では評価Cの児が若 「みられ、本研究での対象児にとっては困難な課題で あるといえる。
以上の結果をまとめると、腕課題での「r異型同時操作」項目や手指課題での「指折り」 「指立 て」項L‑了のように、本研究での対象児にとって困難な課題もあるが、全体的にみた場合、 3次元 形成別の段階に至って、腕課題での「左右伸腕前力水平静止」に示される静的に「〜シツヅケル」
といったコソトロ‑ル能力を獲得し、歩行課題、手指課題にみられるように自己の体のすみずみ まで動的にコソトロールする力へと高めていくとみることができる。
2 身体コントロール・調整能力と言語発達との関連
筆者らはこれまでに、運動機能・能力の発達にどのような要凶が関与しているかについて検討 し、そこから精神遅滞児の運動機能の遅れのメカニズムを明らかにしようとして計画した実験的 研究を行っなてきた。その結果、運動機能・能力の発達には、視知覚機能の発達(田辺、 1985) や身体活動・運動動作の模倣能力(田辺・田村・小出、 1986;田辺・田村・桑田、 1986)等の要
因が一定の重要な役割を果たしていることが明らかにされたo また、個々のケースの検討から運 動機能や運動能力にはこれらの要因以外にもさまざまな要因が関与していることが推察された。
さらには、これらの要因それぞれが個々のものとしてかかわっているだけでなく、それらの要関 が相互に関連し合っていることが示唆され、運動機能の発達が具体的に他の諸機能とどのように 相互関連をもつかについては、さらに検討を要する問題であるとの提起がなされた。
子どもたちは自分自身の行動や運動をコソトロ‑ルし調整することによって外界と切り結んで いくが、その際に、言語機能が重要な役割を果たしていることは Luria(1961)の実証的研究に よっても明らかであるO ここでは、身体コソトロール・調整能力と言語発達との関連についての 若「の検討を試みたい。全対象児の身体コソトロール各課題の得点とITPAによって算出されたP LA との相関係数(Pearsonの係数)を求めたところ、歩行、腕、手指一利手・両手課題におけ
る得点とPLA との間に、それぞれ、 r‑.650、 r‑.645, r‑.726、 r‑.600といずれも1%水w で有意な相関が認められたo また、同操作特性段階における言語学習年齢の高い対象児群(高 PLA粁)と言語学習年齢の低い対象児群(低PLA群)の身体コソトロール・調整各課題におけ る平均得点を求めて示したものが、 Table5である。この結果から明らかなように、 2次元形成 期から3次元形成期のすべての操作特性段階におい低PLA群に比して高PLA群の身体コソト ロ一一ル・調整課題の得点が高いかあるいは同程度といった傾向がみられたO これらの結果は、身 体コソトロール・調整能力と言語発達との間には‑・定の関連があることを示唆するものである。
Table 5 操作特性別高PLA群および低PLA群の身体コントロール・調整課題得点
操 作 特 性 P L A
身体=] ントロ「′し. 調 懲課 題得 点
I Ⅱ 利 手 Ⅶ 両 手
2 次 元 形 成 期 高 P L A 群 : 3 : 8 7.7 ( 2 .8 7 ) 1 0 .0 ( 2 .1 6 ) 5.7 ( 1.2 5 ) 6 .3 ( 0 .4 7 ) (N = 各 3 ) ′ 低 P L A 群 ‥3 : 1 6.7 ( 2 .4 9 ) 9 .0 ( 2 .9 4 ) 5.7 ( 1.2 5 ) 5 .3 ( 1.7 0 ) 2 次 元可逆操 作期 高 P L A 群 : 4 : ] ] 1 0 .5 C 1.5 0 ) 1 5 .0 C 1.0 0 ) 0 .5 ( 1.5 0 ) 9.5 ( 2 .5 0 ) (N = 各 2 ) 低 P L A 群 ‥3 ‥1 0 6 .5 ( 1.5 0 ) 8 .0 ( 2.0 0 ) 7 .5 ( 1.5 0 ) 9 .0 ( 2 .0 0 ) 3 次 元 形 成 期 高 P L A 群 ‥6 : 1 1 0 .8 C 1.4 7 ) 1 4 .4 ( 2 .0 6 ) 1 0 .4 C 1.0 2 ) 9.6 ( 2 .1 4 ) (N = 各 5 ) 低 P L A 群 : 5 : 2 9 一8 ( 1.7 2 ) 1 3 .0 ( 2.2 8 ) 1 0 .4 C 1.3 6 ) 8 .8 ( 1.1 7 )
注) ( )は、標準偏差値を示す。
また、例数が少なく、ここから・椴的な結論は導き出せないが、操作特性段階ごとにみると、
2次元可逆操作期の高PLA群と低PLA群との問に、その得点差が大きかった。言語機能の行 動調整‑のかかわり方の様相は、年齢によって異なることが推察されるところであるo Lかし、
このノ由こついては、実験課題の種目や他者からの言語条件、外言条件、内言条件といった実験条 件・手続によってもその結果が異なることが考えられる。言語による行動調整機能の発達は、い わゆる2次信号系が1次信号系を支配する過程をなすものとして重要な意味をもつものであって、
今後さらに実証的なアプローチによる検討がなされていく必要がある0 引 用 文 献
Bruiniks, R‑H. 1974 Physical and motor development of retarded persons. International Review of Research in Mental Retardation, 7,209‑261 ,
池川由紀江・岡崎裕子・中村敦1980 ダウソ症乳幼児の運動発達 発達障害研究、 1,288‑296.
笠巻数雄1972 精薄児と普通児の運動技能検査の比較 L]本特殊教育学会第10回大会発表論文集、 136‑
137.
上林宏文・池田由紀江1985 ダウソ症幼児の)封J''分析‑Walking Patternの発達過程 口本特殊 教育学会第23回大会発表論文集、 192‑193.
小林芳文・松漸三千代1984 精神発達遅滞児のバラソス能力と身体両側運動機能の評価 横浜[凱If.
大学教育紀要、 24,147‑164.
104 田辺正友・田村浩子・中川貴明
′ト宮勝1970精薄児の身体調整力に関する研究 特殊教育学研究、 8,5ト621
小住兼弘はか1976 ダウソ症候群の歩行の運動力学的特性について(第1報) 宮城教育大学紀要、
11,1‑12.
小柱兼弘ほか1977 ダウン症候群の歩行の運動力学的特性について(第2報) 宮城教育大学紀要、
12,85‑96.
Luria.A.R. 1961 The role of speech in regulati㈹ of normal and abnormal behavior, Pergamon Press.
Malpass.L.F. 1963 Motor skills in mental deficiency. In N.R.Ellis (Ed.) Handbook of Mental Deficiency. McGrow‑Hill.
:̲木安L上ほか1973 ITPA言語学習能力診断検束 日本文化科学杜
森下徳行・藤凹継遭1985 精神遅滞児における歩行動作の特徴 日本特殊教育学会第23回入会発走 論文集、 190‑191.
森卜徳行・藤田継道1986 精神遅滞児の歩行の習得に及ぼす要凶の分析 日本特殊教育学会第24回 入会発表論文集、 150‑151.
Ffl辺止二友1985 発達における機能連関に関する研究(3)‑精神遅滞児の運動機能と視知覚機能 奈良 教育大学紀要、 34(1) 、 145‑156.
田辺正友・田村浩子・小とH一朗1986 精神遅滞児の運動発達一姿勢模倣および動作模倣課題による 分析 障害者問題研究、 46,49‑55.
rfl辺正友・田村浩子・桑田真1986 発達における機能連関に関する研究(4)一精神遅滞児の運動機能 と身体模倣能力 奈良教育大学紀要、 35(1),20ト211.
lfl辺止友・田村浩子1987 精神遅滞児の人物描画における身体像の発達 特殊教育学研究、 25, 41
‑47.
01'卜昌人1977 発達における「階層」の概念の導入について 京都大学教育学部紀要、 23,ト13.
Lfl中呂人1985 発達における階層間の移行について(Ill)京都大学教育学部紀要、 31,32‑59 寺田ひろ子・清水民f‑・荒木穂積1976 幼児期前期の運動発達についてI 乳幼児保育研究、 4,37
‑51.
Development of Motor Function in Mentally Retarded Children
Masatomo TANABE, Hiroko TAMURA and Takaaki NAKAGAWA (Department of Defectology, Nara University of Education, Nara 630, Japan)
(Received April 30, 1987)
Many handicapped children have difficulties in acquiring the motor functions and abilities, which is one of the most important problems in educational practice for handicapped children. In the previous research we examined the development of motor abilities of mentally retarded children. And we made closer examination of children s motor development in relation to other functions such as the visual perception and the ability on imitative expression of others movement.
This study was attempted, first,to investigate the development of abilities of body‑control by mentally retarded children, and second,to examine the relationship between the development of abilities of body‑control and language development. This study was made to clarify the problems of motor development in mentally retarded children. 26 mentally retarded children at various developmental stages between the stage of 2 dimensional forming and that of 3 dimensional operation were administered the body‑control tasks in order to trace their development of motor functions. The tasks consisted of physical locomotion test (containing 4 sub‑tests) , arms‑control test (containing 6 sub‑tests) and finger‑control test (containing 4 sub‑tests). Moreover each subject was given the Illinois Test of Psycholinguistic Abilities in order to evaluate
his psycholinguistic ages (PLA)・
The results were as follows:
1) The abilities of body‑control advanced with the progress of developmental stages from the stage of 2 dimensional forming to that of 3 dimensional operation, and there was a definite developmental pattern at each part of body‑
2) The correlation between the scores of body‑control tasks and the PLA was significant. This result is to illustrate a closer relationship between the development of body‑control and the language development.