Kinect を用いた鍬動作分析研究における
市民共創知研究会を通じた今後の展望
Future Perspective through SIG-CCI on Study of
Analyzing Hoe Movement using Kinect
一ノ瀬 修吾
1白松 俊
1,2大森 友子
2Shugo ICHINOSE
1, Shun SHIRAMATSU
1, and Tomoko OMORI
21
名古屋工業大学
1Nagoya Institute of Technology
2
Agriturismo 大森家
2Agriturismo Omori-ke
Abstract: This study, a crowd co-creation project on analytical techniques and support technologies for agricultural work, was triggered by an idea of a Tono citizen. Specifically, we analyzed hoe movement. Our system observes hoe movement and splits it into action primitives to compare beginner's movement and expert's one. In future, we plan to extract of average behavior of experts, compare data and generate advice automatically. We have been accumulating hoe movement data, though the data amount is not enough yet. This paper describes our future perspective. We can expect to develop the system by getting advice from actual experienced people through SIG-CCI. We hope to discuss about knowledge and tasks in actual hoe movement, how to recruit skilled people, opinions when reconsidering the set of motion primitives, and application to motion other than hoe action.
1 はじめに
本研究は,第 1 回研究会開催地の遠野市の市民が 発案したアイデアを基にしており,農作業の身体の 使い方を分析する研究[1]である.これは,農業を科 学するというコンセプトのもとに立ち上がった市民 共創プロジェクト「スーパーアグリ構想」[2]の一部 である. 具体的にはモーションキャプチャなどのセンサを 使って農作業熟練者の鍬の動作を認識・蓄積してお き,熟練者の平均動作を解析しておく.初心者の鍬 動作を認識した際に熟練者の平均動作と比較してど こが違うのかを指摘しやすくする.疲れにくいまた は力が入りやすいという意味で効率の良い使い方を 分析する技術を開発することにより,初心者でも無 理のない体の使い方ができるようにシステムがアド バイスする機能を目指す.2 鍬動作分析システムに関する概要
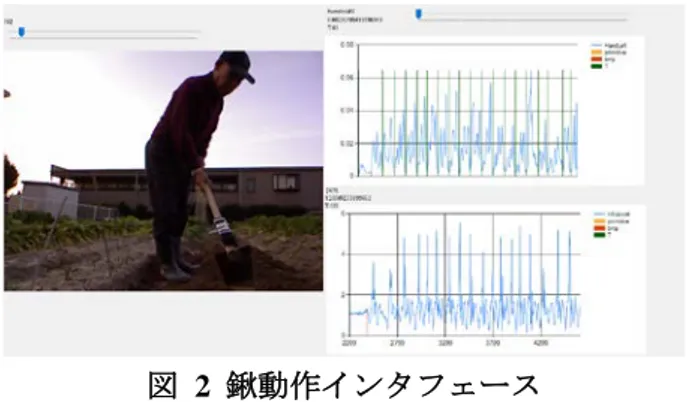
本研究のシステム構成図を図1に示す.まず鍬動 作の認識を行う.本研究では認識のために Kinect と Wii リモコンを使用した.Kincet からは 鍬動作の際の各関節の座標,Wii リモコンか らは鍬先端の加速度を計測する. センサから得られたデータに対して比較 をしやすくするための処理を行う.本研究で は白鳥らの研究[3]を参考にデータを空間 的・時間的に揃えた.具体的には空間的に揃 えるために各関節の座標を,腰を原点として 体の方向が常に横を向くような正規化を行 った.時間的に揃えるためには,各関節の速 度の極小値の閾値から動作プリミティブと 図 1 システム構成図図 2 鍬動作インタフェース よばれる動作単位に分割し,プリミティブ同士の比 較を行うことができるようにした. 将来的に実装する部分としては,熟練者の平均動 作の抽出やデータ同士の比較,アドバイス生成があ る.目視での速度変化の比較は現状でも可能だが, アドバイス生成のための比較の自動化は未実装であ る.熟練者のデータは熟練者データベースに蓄積し, 熟練者同士で似通った特徴点を熟練者の平均動作と して生成した後,生成した平均動作と初心者の動作 を比較してシステムが自動でアドバイスを生成する 予定である. 比較結果とアドバイスは鍬動作インフェース(図 2)上で表示する予定である.
3 市民共創知研究会を通じた改良に
関する考察
本研究の課題となることのいくつかは,市民共創 知研究会での対話・共創によって解決することがで きると思われる.仙石らのみらいらぼ[4]を用いれば Web 上で議論をすることが可能だが,対面の対話・ 共創セッションで以下の話題について議論し,それ を今後のみらいらぼ上の議論に繋げていきたいと考 えている.3.1 鍬作業の重要度に関する知見
本システムの開発者には鍬作業経験者が存在せず, 鍬動作における基礎知識やどのようなことが問題と なるかの認識が不足している.そこで市民共創知研 究会での対話を通じて実際の熟練者や経験者からの 意見を得ることでシステムの完成度を高めることが できると考えている.具体的には鍬作業のうち,重 要度の高い作業や負担の多い作業について重点的に データを集め動作分析を行っていきたいと考えてい る.3.2 熟練者の募集
本研究では,これまで 1 名の熟練者からデータを 収集したが,まだ解析できるほど多くの熟練者のデ ータを得られていない.そこで熟練者をどのように 募集し,データを収集するかについて対話したいと 考えている.3.3 動作プリミティブのセットの再考
鍬動作を動作プリミティブに分割する際,熟練者 からの意見をもとに,どの鍬動作をどのようなプリ ミティブのセットとするかを想定したいと考えてい る. また,将来的に蓄積した熟練者のデータから得た 平均動作の時系列データのグラフからプリミティブ に分けられる部分を目視で確認する際に熟練者の視 点からのアドバイスも必要となると思われる.3.4 鍬動作以外の動作の認識
本システムは Kinect の前で Wii リモコンを持って 動けば,鍬動作以外の動作も認識することができる. そこで鍬作業以外に,動作の認識を行うことで改善 することができそうな動作について対話を行いたい と考えている.どのような動作を認識することがで きるのか,そして認識できることでどのような利点 があるか意見を集めることで新たな需要を発見する ことができると考えられる.4 おわりに
本研究では,鍬動作を Kinect と Wii リモコンを使 って認識し比較のための処理を行い,熟練者データ を蓄積した.最終的には蓄積した熟練者達のデータ を解析して熟練者の平均動作を抽出し,初心者の動 作を認識した際に平均動作をもとにアドバイスを生 成するシステムの開発を目指している. そして市民共創知研究会での対話・共創を通じて 実際の熟練者や経験者からのアドバイスを得ること によってシステムを発展させることが期待できる. 具体的には 実際の鍬動作における知識・課題となること 熟練者の募集方法 動作プリミティブのセットを再考する際の意見 鍬動作以外の動作への応用 などについて,市民共創知研究会で議論できること を期待している.謝辞
本 研 究 の 一 部 は , JSPS 科 研 費 (No.25870321, No. 17K00461) および JST CREST (No. JPMJCR15E1) の 支援を受けた.また,人工知能学会第 1 回市民共創 知研究会の対話セッションやみらいらぼ上で本研究 に対して意見やアドバイスを頂いた井上明氏,大澤 健氏,田中克明氏,山口昌美氏に深く感謝する.