久留米工業大学研究報告 NO.
M
K
稲 加 杉 芦 森
背幅 .ミリ(森)
久
留
米
工
業
大
学
研
究
報
告
第
号
久 留 米 工 業 大 学2014
久留米工業大学
研 究 報 告
2014
BULLETIN
OF KURUME INSTITUTE
OF TECHNOLOGY
No.37
[Paper] Improvement of Steering Effort Characteristics on Small Type Racing Car
………Takuma MAEDA and Kazunori MORI……… Analysis on Spring and Damper Characteristics of Suspension with Bell Crank Mechanism
………Kazunori MORI……… Fundamental Study of Waste Heat Recovery in the High Boosted MultiCylinder Diesel Engine ………Takuya YAMAGUCHI……… Effects of Excitation Phenomenon by a Radioactive Ceramics Catalyst on Engine Combustion
………Takashi WATANABE……… Research of Power Output Efficiency by Solar Photovoltaics System in Kurume City
………Yoshitami NONOMURA……… Verification of relationship of evaluation taste palatability and result using ranking algorithm of food with favorite taste
………Shinichi ETOH……… Issues and Perspectives on the Career Education in The Central Council for Education s report on
Future vision on Career Education and Vocational Education at school
………Kenichiro HORI……… [List of Articles, Reports / Miscellaneous, Books and Presentations] ……… [List of Master s Theses (2013)] ………
No.37
[論 文] 小型レーシングカーの操舵力特性の改善 ………前田 拓磨・森 和典……… ベルクランク機構を有するサスペンションのばね・ダンパ特性の解析 ………森 和典……… 高過給多気筒ディーゼルエンジンにおける排熱回生の基礎研究 ………山口 卓也……… エンジンの燃焼に及ぼす放射性セラミックス触媒による励起作用の影響 ………渡邉 孝司……… 久留米市における太陽光発電システムの発電効率に関する研究 ………野々村善民……… 味の嗜好性評価結果と好みの味順位化アルゴリズムの順位結果との関係性の検証 ………江藤 信一……… 「今後の学校におけるキャリア教育・職業教育の在り方について」(中教審答申)から みるキャリア教育の課題と展望 ………堀 憲一郎……… [論文,報告・その他,著者および学会講演]……… [平成 年度修士課程修了論文題目]………久留米工業大学研究報告
No.
〔論 文〕
小型レーシングカーの操舵力特性の改善
前田 拓磨
*・森
和典
*Improvement of Steering Effort Characteristics on Small Type Racing Car
Takuma MAEDA
*and Kazunori MORI
*Abstract
Generally, in small-type racing cars, it is difficult to balance the vehicle dynamics capability and the steering effort characteristics because of the restriction of the vehicle specifications. By analyzing steering effort using a simple steering model and a mechanism analysis that uses 3D-CAD etc. on the vehicle with the double wishbone type suspension and the R&P type steering system, the researchers clarify a method that can coexist making the suspension/ steering geometry the target characteristics and achieving the decrease of steering effort.
Key Words:Racing car, Vehicle dynamics, Suspension, Steering, Geometry, Steering effort
.まえがき JSAE フォーミュラーカー(JSAE カーと記述する)は,オープンホイールタイプの小型レーシングカーの範疇に入 り,車両レイアウト上,サスペンションやステアリングのリンク長を短くせざるを得ないなどサスペンション/ステア リング・リンクのジオメトリを決定する際の制約が多く,目標とする走行性能を確保しつつ操舵力の適正化を図ること は克服すべき課題のひとつである. そこで,JSAE カーのダブルウィッシュボーン式フロントサスペンションに関して,ステアリングおよびサスペンショ ン・ジオメトリの観点から,目標のジオメトリ特性の確保と操舵力低減の両立を図る方法を検討したのでその概要を報 告する. .ステアリングの簡易モデルによる操舵力解析 ・ 記号の説明 本報の中で用いる主な記号とその説明の一覧を示す. :ステアリングホイール∼コラムシャフト部の減衰係数 :ピニオン・ギヤから伝達されるラックギヤ推力 :コーナリングフォース :ステアリングホイール操舵力 :タイヤ発生力による抵抗やラック軸受等の摩擦力 :ラック部の全推力 :コラムシャフト部の慣性モーメント :ステアリングホイール部の慣性モーメント :ピニオン・ギヤの慣性モーメント !!:キングピン軸回りの慣性モーメント :ステアリングホイール∼コラムシャフト部のねじり剛性 :ラック∼ピニオン・ギヤ部のねじり剛性 :操舵力によるキングピン軸回りモーメント :セルフ・アライニング・トルク :タイヤ発生力によるキングピン軸回りモーメント :ステアリングホイール操舵トルク = :アシスト力,パワーステアリング装置が無い場合は = :ステアリングホイールの直径 :ナックルアーム長 :ラック・ギヤ部の等価質量 :ラック・ギヤのピッチ円半径 * (株)ヨロズ * 交通機械工学科 平成 年 月 日受理
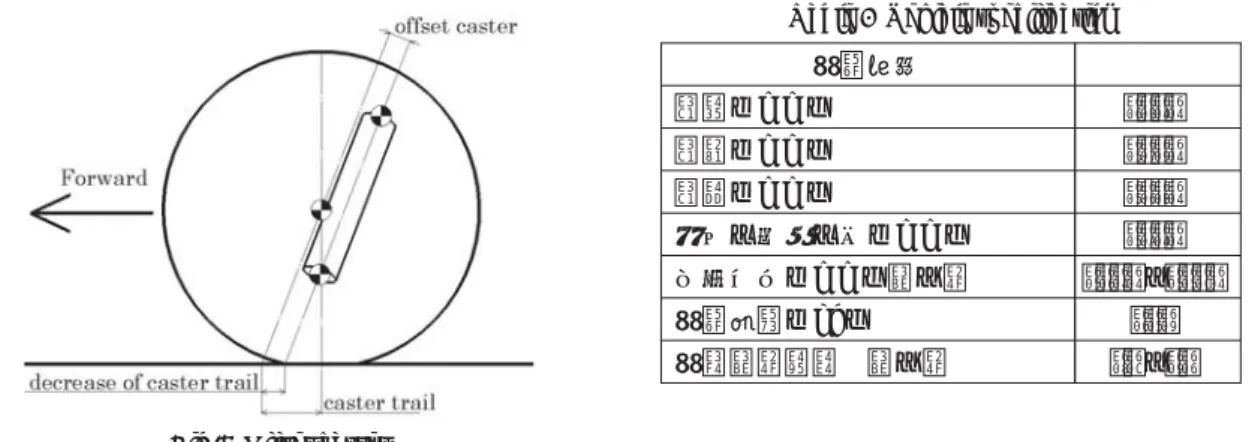
:ラック・ストローク α ,α:ラック軸とサイドロッドのなす角 β ,β:サイドロッドとナックルアームのなす角(トグル角) δ ,δ:タイヤ実舵角(トー角) #",#:キャスタ角 θ:ステアリングホイール操舵角 θ :コラムシャフト部の回転角 θ :ピニオン・ギヤの回転角 ξ ,ξ :キャスタ・トレール ξ :タイヤのニューマチックトレール η :リンク効率 η :ラック∼ピニオン・ギヤの伝達効率 添字: = は旋回外輪, = は旋回内輪 ・ 解析モデル 図 は,ラック・アンド・ピニオン(R&P)式ステアリング装置の解析モデルを示す.運動方程式は次式により表 される( ) . ""= − ("!−"!)− (θ−θ ) ""= ("!−"!)− (θ −θ)− (θ −θ ) ! $ $ " $ $ # "!=− − (θ −θ ) ⑴ #$"= = +η − !$!"= − ,!$!"= − ただし, = θ .なお,キングピン傾斜角による持ち上げトルクは無視する. ドライバーの操舵力による旋回内外輪のラック軸力をそれぞれ , とすると,式⑴の第 式の右辺第 項では, η = + ⑵ が成り立つ. サイドロッドに働く軸力を ,この によってナックルアームの軸直角方向に働く力を とすると, = cosα ! " # = sinβ の関係があり, = cosα sinβ ⑶ となる.したがって,キングピン軸回りのモーメント は = = cosα sinβ = η ⑷ で与えられる. ここで,記号の添字 は旋回外輪の場合 = ,旋回内輪の場合 = と記す.また,リンク効率をη = / とすると, 式⑶よりη =cosα sinβ を得る. タイヤのセルフ・アライニング・トルクを ,コーナリングフォースを とすると,タイヤ発生力によるキン
グピン軸回りのモーメント は, =( + ξ )cos !" ⑸ で与えられる. ラック部の抵抗力 がタイヤ発生力のみとすると,式⑸を用いて = η+ η ⑹ と表される. トー角δ は,ラック・ストローク の関数だから,δ =δ( ),δ =δ(− )と記すことができる.また,!",ξ ,α ,β は,ホイール・ストロークおよびラック・ストロークにより変化するため,サスペンションとステアリング・ジオメト リから導くことになる. 過渡操舵時の操舵力を求めるには,式⑴∼⑹を解かなければならない.しかし,この非線形連立微分方程式を解くた めには計算機を用いた近次計算が必要となり,対策案の検討に利用するには手法が煩雑すぎて見通しが立て難い.そこ で,操保舵力軽減策の方向性について見通しを良くするため,ある前提条件の下に上述の関係式を極力簡単化すること を試みる. 前提条件は,①緩操舵や固定舵の走行状態として,式⑴の角加速度,加速度および速度項は省略.②タイヤ実舵角が 小さいとして,δ =δ , = のように左右輪で異なる角度,力は同じ.③タイヤのスリップ角に対するコーナリング 特性は線形.④パワーステアリング装置は無しとする. この前提条件を式⑴∼⑹に当てはめて静力学的な関係を求める. 式⑴の第 ∼ 式より, = ⑺ 式⑴の第 式と式⑹より, η = cosα sinβ ⑻ を得る.ただし, = = ,α=α =α ,β=β =β . さらに,式⑸より, = (ξ +ξ )cos ! ⑼ を得る.ただし, = = ,ξ =ξ =ξ ,!=!!=!#. したがって,式⑺∼⑼により,操舵力 は, = (ξ +ξ ) cos ! η cosα sinβ ⑽ となる. ・ 計算結果 式⑽を用いて,各要素の主要寸法や取り付け角度等を変更したときの操舵力を計算した.主な計算結果を図 ∼図 に示す.図はそれぞれ,ナックルアーム長,リンク効率,キャスタトレールおよびキャスタ角を変数としたときの操舵
力の大きさを表す.また,対策前( 年度 JSAE フォーミュラカー仕様)のジオメトリで計算した結果を,図中に「現 状」として丸印で記している.なお,掲示した図の計算では,ステアリングホイール直径 = . [m],ニューマチッ クトレールξ = . [m],R&P ギヤの伝達効率 η = . ,ピニオンギヤのピッチ円半径 = . [m]とし,タ イヤ横力はスリップ角 °時のコーナリングフォース値を用い = [N]とおいた. 簡易な解析モデルを用いた計算結果から,サスペンションおよびステアリング・ジオメトリの観点から操保舵力を低 減する方法として次のことが判った. ①ナックルアーム長 を長くする. ②リンク交差角であるα を 度に,β を 度に近づける.レイアウト上は逆アッカーマン機構のジオメトリにすると都 合が良いが,リンク効率を向上させるためにステアリング・ジオメトリをパラレル・リンク機構に近づける.この場 合,タイヤのスリップが減少するため,操舵力低減に効果が期待できる. また,ステアリング機構は,サイドロッドを大幅に伸長できるセンター・テイクオフ方式を採用すると,レイアウ ト的に,またリンク効率向上にも好都合の場合が多くなり,さらにホイールアライメント変化を小さく出来るなどの 可能性がある. ③キャスタ・トレールξ およびキャスタ角 !を小さくする.!を小さくすれば,ξ が小さく出来るが,図 より明らか なようにキャスタ角の効果は限定的である. しかし,図 に示すようなオフセット・キャスタ化を図るとξ を小さくすることができる. .操舵力軽減のためのサスペンション/ステアリング・ジオメトリ ・ 具体的な操舵力軽減策 前章で示したような方策を実際の設計段階で検討する際は,タイヤを大きく操舵したときに周辺部品と干渉しないよ うにしたり,ステアリング OA ギヤ比やステアリング/サスペンション・ジオメトリなどとの関係を併せて考慮する 必要がある. 表 は,検討対象の 年度 JSAE フォーミュラカーの主な車両諸元を示す. JSAE カーは,狭い空間にステアリング装置を搭載しなければならないために,ナックルアーム長とリンク効率は特 に密接な相互関係があり,いずれかを変更するとラック取り付けの前後位置まで変更せざるを得なくなる.また,ラッ
Fig. 2 Steering effort to length of knuckle arm Fig. 3 Steering effort to link efficiency
Fig. 8 Measures by efficiency of steering linkage Fig. 7 Measures by length of knuckle arm
Fig. 9 Measures by caster trail Fig. 10 Measures by caster angle
ク取り付け位置にも制約があるため,相互干渉しないようにナックルアーム長とリンク効率を決める必要がある. そこで,レイアウトを検討した結果,対策案としてナックルアーム長を mm,リンク効率をパラレルリンク機構化 (α= °,β= °)に設定する. また,側面図においてキングピン軸が車軸中心を通る一般的な構造では,キャスタトレールはキャスタ角により決定 される.操舵力を小さくする目的でキャスタ角を小さくすると直進安定性が低くなる可能性がある.そこで,キングピ ン軸を車軸中心からオフセットした配置とするオフセット・キャスタ化を図る.これにより,キャスタ角を変更するこ となく,キャスタトレールを小さくできる.ここでは,対策案としてキャスタトレールを mm に設定する. 操舵力の具体的な最終目標値は,現状から考えて約 %軽減できるように各数値を設定した. 図 ∼図 は,それぞれナックルアーム長,リンク効率,キャスタトレールおよびキャスタ角に関する対策案の数値 と操舵力の大きさを示す.図中の「変更可能範囲」は,車両のレイアウト上,他の装置や部品と干渉しない寸法・角度 等の範囲を意味する. ・ サスペンション/ステアリング・ジオメトリの目標特性 操舵力低減案に加えて,車両運動性能を確保する観点から,以下の目標特性を満足するようにサスペンション/ステ アリング・ジオメトリを決定する. ① 旋回運動時おいて,路面凹凸や制動駆動を伴う場合の車体姿勢変化等による車両ステア特性の急変を防止したり,
Table 1 Vehicle specification
車両諸元 全長[mm] 全高[mm] 全幅[mm] ホイールベース[mm] トレッド[mm]前/後 / 車両重量[kg] 車体前後配分 前/後 /
Fig. 11 Calculation model of suspension/steering geometry Fig. 12 Wheel stroke in suspension system 直進安定性を確保するために,ホイールストロークに対してトー角変化が起こらないようにする.具体的にはロー ルステア率を %とするか,この値に近づける. ② 高横Gを伴う旋回運動では,ポジティブ・キャンバ角で生じるキャンバスラストが原因でタイヤの横力を減少し ないようにすることが必要である.このためには,路面に対するタイヤの傾きを垂直に保つことで横力の減少を無 くすか,積極的にネガティブ・キャンバ化を図りタイヤ横力を増やすことが望まれる. 具体的には,高横G領域で影響が大きい旋回外輪側,つまりバウンド・ストローク側における対地キャンバ角を °に近づけることを目標とする. その他,持ち上げトルクとスクラブ半径と関係が深いキングピン傾斜角の適正化,タイヤ横力に影響するタイヤ・ス カッフおよびロールセンタ高さなど検討すべき項目は数多いが,ここでは,車両運動性能に最も大きな影響を与えるトー 角とキャンバ角変化特性に注目して目標を絞り込んだ. ・ 解析方法 ジオメトリ計算では ・ の対策案と ・ の目標特性を満足するように,まずは試行錯誤的に数多くのケースを計 算する必要がある.そこで,データの取り扱いが簡単で計算時間が短くて済む MATLAB 言語の機構解析プログラム( ) を用いる.各ピボット座標が目標特性に与える影響を把握しながら最良のピボット座標を絞り込み,ジオメトリを決定 する.
次に,その結果を基にして, D-CAD ソフト(Solidworks Motion 解析)を用いた詳細な機構解析を行う.
図 は,サスペンション/ステアリングのジオメトリ計算に用いた D-CAD 解析モデルで,ラック・アンド・ピニ オン式ステアリングを配したダブルウィッシュボーン式フロント・サスペンションを示す.アッパーアームの 点,ロ アーアームの 点,タイロッドおよびナックルアーム・ボールジョイントの 点,車軸の 点の合計 のピボット座標 によりジオメトリを計算する. 図 は,バウンド側およびリバウンド側に mm ストロークさせたホイールの部位を示す.計算ではホイールを上下 mm の範囲でストロークさせてアライメントの変化を調べる.アッパーアームボールジョイント,ロアーアームボー ルジョイント,車軸の 点の軌跡を求めて,キャンバ角,トー角,キャスタ角等の変化をグラフ化して調べる. ・ 解析結果と考察 年度に製作された JSAE フォーミュラカーのジオメトリを現行ベースとして,対策案を検討した.この車両のキャ ンバ角(対車体)とトー角変化の計算結果を図 に示す.縦軸のホールストロークに関しては,+側はバウンド,−側 はリバウンドを表わしている.横軸のキャンバ角に関しては,+側をポジティブ・キャンバ,−側をネガティブ・キャ ンバとしている.トー角に関しては,+側をトーイン,−側をトーアウトとしている.旋回外輪側のキャンバ角は,目 標とする対地キャンバ角 度のラインから大きく離れていることがわかる.そこで,まずキャンバ角特性の改善から行っ た.バウンド時にネガティブ・キャンバ,リバウンド時にポジティブ・キャンバ化を図るために,アッパーアームをロ アアームに対して短くする必要がある.ここでは,アッパーアームの車体側の座標を変更してロアアームに対して mm 短く設定した( )( ) .この変更によるジオメトリを Case と呼ぶことにする.図 は Case の計算結果を示す.現行ベー
スに比べて対地キャンバ角 °のラインに近づいたことがわかる. しかし,レイアウト上,アッパーアームの長さをさらには短くできないため,コーナリング時に重要であるバウンド 側を対地キャンバ角 °のラインにできるだけ近づけることにする.キャンバ角特性はホイールストロークに対して直 線的な変化ではなく,曲線的な変化とするため,アッパーアームの車体側座標を mm 下げるように設定した.また, より目標値に近づけるため,初期キャンバ角を− .°付けた. 次に,トー角変化はバウンド時にトーアウト,リバウンド時にトーインのアンダーステア特性である.トー角変化を 起こさないことを目標としているため,タイロッドの車体側座標を mm 下げるように設定した.以上の変更を織り込
Fig. 13 Characteristics of camber and toe angles (Base car)
Fig. 14 Characteristics of camber and toe angles (Case 1)
Fig. 15 Characteristics of camber and toe angles (Case 2)
んだジオメトリを Case と呼ぶことにする.図 は Case の計算結果を示す.この図より,キャンバ角とトー角特性 が目標に大きく近づくことがわかる. また,操舵時のキャンバ変化についても調べた.図 はラックストロークを mm, mm とした時の,旋回外輪側 のキャンバ角(対車体)の変化を示す.タイヤを操舵すると,わずかではあるがキャンバ角変化が大きくなることが理 解できる. さらに,本報ではトー角とキャンバ角特性に的を絞り,ホイールセンタがキングピン軸上にある一般的なジオメトリ (オフセット無しと記す)と,キングピン軸がホイールセンタからオフセットした「オフセット・キャスタ」(オフセッ ト有りと記す)を比較して考察する.図 は,これまで述べてきたジオメトリに関する変更部位をまとめたものであり, 最終的な対策案である. 図 は,オフセットキャスタ有りとオフセットキャスタ無しのトー角変化を示す.双方ともにトー角変化の目標特性 を満たしていることがわかる.厳密に比較すると,オフセットキャスタ無しよりもオフセットキャスタ有りのほうがトー
Fig. 17 Proposed change of geometry
Fig. 20 Camber angles at rack stroke 20 mm Fig. 21 Camber angles at rack stroke 40 mm Fig. 18 Characteristics of toe angle (Offset caster) Fig. 19 Camber angles at rack stroke 0 mm
角の目標特性に近い結果を得た. 図 は,キャンバ角(対車体)変化を示す.オフセットキャスタ有りとオフセットキャスタ無しのキャンバ角特性は, ほぼ同じ結果となった. タイヤ操舵時のキャンバ角特性についても検討した.図 と図 は,それぞれラックストロークが mm と mm の 時のキャンバ角(対車体)変化を示す. つの図において,オフセット・キャスタ有りとオフセット・キャスタ無しを 比較すると,オフセットキャスタ無しのほうがオフセットキャスタ有りよりも目標特性に近いという結果を得た.また, ラック・ストロークが増加するのに伴い,オフセット・キャスタ有り無し共にキャンバ角変化が大きくなる.つまり, この対策案のオフセット・キャスタ化では操舵時のキャンバ角特性を大きく向上できないことが判明した. .ま と め ⑴ フロントサスペンションとステアリングの簡易な力学モデルを構築して操舵力軽減策の検討方法,および D-CAD 等を用いたサスペンション/ステアリング・ジオメトリ解析方法を確立した. ⑵ 小型レーシングカーにおいて,車両運動性能の目標性能確保と操保舵力軽減の両立は可能であることを明らかにし た.操舵力は計算上, 年度 JSAE フォーミュラカー仕様よりも約 %軽減することが可能であり,その対策案を 示すことができた. 文 献
⑴ Mori,K., Maneuverability and Stability of Vehicle through Chassis Integrity Control, Vol.68, No.671 (2002), pp.172-179.
⑵ 森和典,“サスペンション・ステアリング幾何の計算法に関する考察”,久留米工業大学研究報告,No. ( ‐ ), pp. ‐ .
⑶ 藤岡健彦,鎌田実,自動車プロジェクト開発工学( ),pp. ‐ ,技報堂出版. ⑷ 宇野高明,車両運動性能とシャシーメカニズム( ),pp. ‐ ,グランプリ出版.
〔論 文〕
ベルクランク機構を有するサスペンションの
ばね・ダンパ特性の解析
森
和典
*Analysis on Spring and Damper Characteristics of Suspension
with Bell Crank Mechanism
Kazunori MORI
*Abstract
The spring and damper characteristics of suspension systems have the key role for the maneuverability and stability as well as the riding comfort performance of a vehicle. Using a double wishbone type suspension with bell crank and pushrod as a model, this paper introduces a method for calculating suspension spring, shock absorber, anti-roll bar and pitting damper geometries using expressions derived directly from the kinematics of mechanism theory. Next, the authors derive expressions such as link lever ratio, spring constant converted into wheel center location, and roll stiffness by using the linear approximation functions obtained based on these calculation results and the balance equations of power derived from a dynamic model that simplifies bell crank surroundings. Finally, the authors clarify the relativity of these suspension characteristics and the geometries.
Key Words:Racing Car, Suspension, Link Geometry, Bell Crank, Pushrod, Spring, Shock Absorber, Mechanism, Vehicle Dynamics .まえがき サスペンションのばねとショックアブソーバは,車両運動性能に大きな影響を及ぼす特性を有する構成要素である( ) . オープンホイール・タイプのレーシングカーのダブルウィッシュボーン式サスペンションでは,ばねとショックアブ ソーバなどを車体に内蔵して空気抵抗低減を図るために,ベルクランクとプッシュロッドを用いる機構が多用されてい る( ) .また最近はリヤ・サスペンションにプルロッド・タイプの採用が増えている. ベルクランクは,サスペンションのロアアーム(またはロアリンク)と連結されたプッシュロッド,ばね,ショック アブソーバおよびスタビライザ等の片側端が取り付けられており,ベルクランク回転軸に対するこれら片側端の取付点 の位置がサスペンション特性に影響することになる. 著者は,既にダブルウィッシュボーン式サスペンションと R&P 式ステアリングを例に取り上げて,サスペンション /ステアリング・ジオメトリに関して機構学の基本から論じた計算方法を示した( ) .しかし,ベルクランク機構を有す るサスペンションのジオメトリに関する具体的な計算方法を記した文献等は見当たらないようである. ベルクランクとプッシュロッドを用いたダブルウィッシュボーン式フロント・サスペンションと R&P 式ステアリン グとを組み合わせた走行装置と車両運動性能との関連性について解析を進めているが,本報告は第一報として,計算解 析上の主要部となるサスペンションばね,ショックアブソーバ,スタビライザおよびピッチング・ダンパ(サード・ダ ンパ)のジオメトリについて,機構学理論から導出した数式を用いて直接計算する方法を示す. 次に,ホイールストロークとばね,ショックアブソーバ取付長の比(リンク・レバー比と呼ぶ)等について簡易な解 析モデルを用いて計算式を導出し,リンク・レバー比とサスペンション特性の関連性を考察する. * 交通機械工学科 平成 年 月 日受理
.記号の説明
主な座標点と角度
AL:rear pivot of lower arm BL:ball joint of lower arm CL:front pivot of lower arm
Ab:arbitrary point on bell crank rotational axis
Cb:installation position (body side) of bell crank rotational axis
Cb:installation position (bell crank side) of bell crank rotational axis
Bb:installation position (bell crank side) of push rod
EL:installation position (lower arm side) of push rod
Bb:installation position (bell crank side) of shock absorber and spring
EU:installation position (body side) of shock absorber and spring
Bb:installation position (bell crank side) of stabilizer rod
ST:stabilizer rod pivot (torsion bar stay side)
γ :initial swing angle of bell crank θ :swing angle of bell crank
"!!:total swing angle of bell crank "!!=γ +θ
θ :swing angle of suspension lower arm
T:rotational axis center of torsion bar for stabilizer (stay side) Tb:rotational axis center of torsion bar for stabilizer (body side)
α :initial inclination angle of torsion bar θ :inclination swing angle of torsion bar
!"!!:total inclination angle of torsion bar !"!!=α +θ
θ :torsion angle of torsion bar for stabilizer
PS:installation position (torsion bar stay side) of pitching damper
PB:installation position (body side) of pitching damper
:length of bell crank rotational axis, distance from Cbto Ab
:push rod length
:installation length of suspension shock absorber and spring, distance from Bb to EU
:length of stabilizer rod, distance from STto Bb
:installation length of pitting damper, distance from PSto PB
:half length of stabilizer stay, distance from T to ST
:stabilizer length, distance from Tbto T
: coordinate of PS : coordinate of PS
:swing radius of Bb :swing radius of Bb :swing radius of Bb
θ :angle between segment CbBb and segment CbBb
Fig 2 Installation relation of each parts around bell crank (Plan view) Fig. 1 Double wishbone type front suspension with bell crank mechanism
.理論計算式の導出 ・ 計算モデル 本報告で使用したサスペンション・ステアリングのジオメトリの計算方法,アーム類の記号は,全て文献⑶を引用し ているため,これらの詳細な説明は省略する.以下は,関係する項目のみを記す. 図 は,ベルクランクとプッシュロッドを用いたダブルウィッシュボーン式フロントサスペンションの概要を示す. ステアリング装置は R&P 式とする.座標系 は,車体に固定した基準座標系とする.原点 は,車両の正面図 において,車体の左右対称面を意味する中心線上に設定する. , , 軸は,それぞれ左,後,上方向を正とする. 図 は,ベルクランクを中心に,ばね,ショックアブソーバ,スタビライザなどの取り付け関係を表わしたイメージ 図である.この機構は,車両のピッチング振動を抑制するためピッチング・ダンパを取り付けたのが特徴である. 図 は,ベルクランク,プッシュロッド,ばね,ショックアブソーバ,スタビライザおよびピッチング・ダンパの取 り付け点を表す記号を示す.また,計算に必要な主要寸法,角度を表す記号も併せて示す. ジオメトリの計算方法は,文献⑶に示されたダブルウィッシュボーン式サスペンションにおけるアーム類の遥動角や ボールジョイント,ホイールセンタ位置の計算方法・手順と同じである.
Fig. 4 Transformation of coordinate systems for bell crank ・ ベルクランクとプッシュロッド 図 は,座標変換で導出したベルクランク固定座標系と ' ,その導出過程の座標系およびオイラー角α ,β , γ' を記す. ' ' ' ' 系は基準座標系 を平行移動し,原点を点 Cbとした座標系である.したがって,任意点の基準座 標[ ],部品座標系における座標[ ' ' ' ],および点 Cbの基準座標[ ]の間には, " # $ ! % % # " & & $# "!% #!% $!% ! % % # " & & $" &%$ '%$ (%$ ! % % # " & & $ ⑴ の関係が成り立つ.また,式⑴より次式が得られる. &%$ '%$ (%$ ! % % # " & & $# "!"!% #!#!% $!$!% ! % # " & $ ⑵ ベルクランク上の任意点の位置関係が容易に計算できるように, 系を回転させて新たな座標系に変換する. ベルクランク上の 点が作る△CbBbAbが座標系 の つの座標軸が張る平面上に存在するように座標変換を 行い,変換行列はオイラー角を用いて表す. まず, 系を 軸回りにα 回転させた座標系を とする.次に 系を 軸回りにβ 回 転させた座標系を とする.この時,ベルクランクの回転軸 CbAbが 軸上となるように定める.さらに, 系を 軸回りにγ 回転させた座標系を とする.角度γ は,プッシュロッド取り付け部 Abが 軸 上に位置するように定める.ここでは,γ を初期値,遥動角 θ とおくとき,全遥動角を γ =γ +θ とする.
以上により,ベルクランクの部品座標系 で表される任意点を基準座標系に変換する式が得られる. # $ % ! % % # " & & $# #"& $"& %"& ! % % # " & & $" (&& )&& *&& ! % % # " & & $# #"& $"& %"& ! % % # " & & $"""& (&" )&" *&" ! % % # " & & $ ⑶ # #"& $"& %"& ! % % # " & & $"""&"#& (&# )&# *&# ! % % # " & & $# #"& $"& %"& ! % % # " & &
$"""&"#&"$&&
(& )& *& ! % # " & $ 式⑶において,!"#$&&#""&"#&"$&&とすると,
# $ % ! % % # " & & $# #"& $"& %"& ! % % # " & & $"!"#$&& (& )& *& ! % # " & $ ⑷ ただし,
""&#" ($&&#(&"!"&%#
" ! ! ! $'("& (%&"& ! !(%&"& $'("& ! % # " & $
"#&#" )$&"#)&#!#&%#
$'(#& ! !(%&#& ! " ! (%&#& ! $'(#& ! % # " & $
"$&&#" *$&##*&!$&&%#
$'($&&
(%&$&&
!
!(%&$&&
$'($&& ! ! ! " ! % # " & $ ・点 Abに関して: 系における点 Abの座標は[ ]だから,式⑶より #!& $!& %!& ! % % # " & & $# #"& $"& %"& ! % % # " & & $"""&"#& ! ! '& ! % # " & $ これを展開してまとめると, #!&!#"& $!&!$"& %!&!%"& ! % # " & $#
'&(%&#&
!'&(%&"&$'(#&
'&$'("&(%&#&
! % # " & $ ⑸ を得る.式⑸の第 , 行目を取り上げると,α と β を求めることができる. (%&#&##!&!#"&
'& ! $ " $ # ⑹ (%&"&#!$!&!$"&
'&$'(#&
ただし,点 Abと点 Cbが初期値として基準座標系により与えられているならば,
'&# #'$!&!#"&%#" $$!&!$"&%#" %$!&!%"&%# ⑺ である. なお,点 Cbとべルクランク上の回転軸位置 Cbとの距離を ' とするとき,点 Abと Cbが同じ位置ならば, = ' で ある. 以降は,点 Abと Cbが同じ位置として説明する. ・点 Bbに関して: 式⑶を置換すると,
/)# 0)# 1)# ! % # " & $#%"$)%"#) &!&") '!'") (!(") ! % # " & $ ⑻ が得られる. したがって,点 Bbの初期位置が基準座標系で与えられたとき, 系に関する座標は,式⑻を用いて /)#!)"! 0)#!)"! 1)#!)"! ! % # " & $#%" $)%"#) &!)"!!&") '!)"!!'") (!)"!!(") ! % # " & $ ⑼ となる. 式⑼より,回転半径 と遥動角の初期値γ が計算できる. .)"# /')#!)"!# "0)#!)"!# ! $ " $ # ⑽ (%&&)#!/)#!)"! &)" !$'(&)#0 )#!)"! &)" 式⑷を用いれば,遥動角がγ のときのプッシュロッドの点 Bbの基準座標は &!)" '!)" (!)" ! % # " & $# &") '") (") ! % # " & $"!#$&)) ! .)" ! ! % # " & $ ⑾ と表される.式⑾の右辺の は,式⑽を用いて計算できる.また,座標変換行列 γ はパラメータθ の関数だから, , , は全てθ の関数となる.したがって,θ が確定すれば,点 Bbの基準座標を求めることが可能になる. プッシュロッドの一方の端部はロアアームに取り付けられており,ホイールストロークに応じてロアアームの遥動角 θ が変化すると,プッシュロッドを介してベルクランクの遥動角 θ が変化する. そこで,θ が与えられたとき,θ は近似解法を用いて計算する. 点 Bbとロアアーム側のプッシュロッド取り付け点 ELの初期位置をそれぞれ[ ],[ ]と すると,プッシュロッドの長さ は, $-*# &'$!)"!!&#$!%#" '$!)"!!'#$!%#" ($!)"!!(#$!%# ⑿ である. 点 ELと点 Bbが変位したとき,この 点間の距離を (θ )とすると,
$-*,$ %# &') '&!)"$ %!&') #$'#" '&!)"$ %!'') #$'#" (&!)"$ %!(') #$'# ⒀
で与えられる.そこで, + '$ %#$) -*,$ %!$') -* ⒁ と定義すれば,(θ )= を満足する θ を求める問題に帰着する. ここでは,Newton-Raphson 法を用いた近似解法の計算手順を記す. ①')$%#'" )!とおく.初期値はθ = でも可. ②')$,""%#')$%!, + '&)$%,' +)' )$%, & 'を計算する. ③(')$,""%!')$%,("%が成立する場合は手順④へ進む.成立しない場合は, = + と置換して手順②へ戻る.定数 ε は近似精度に影響するため,できるだけ小さい値に設定しておく. ④')#')$,""%として終了. なお,手順②の中で微分式の部分は次のとおり.
+)$ %#') $&!)"!&#$%*& !)" *') " '$!)"!'#$%*' !)" *') " ($!)"!(#$%*( !)" *') &!)"!&#$ $ %#" ' !)"!'#$ $ %#" ( !)"!(#$ $ %# '
+ +%* &!*" '!*" (!*" ! % # " & $# ""*"#*+"$ &* +%* ! -*" ! ! % # " & $, +"$&* +%* !)&'$*& %()$*& ! !%()$*& !)&'$*& ! ! ! ! ! % # " & $ 以上より,θ の近似解が得られると,式⑾により点 Bbが確定する. ・点 Bbに関して: 点 Bbの初期位置が基準座標系で与えられたとき,部品固定座標系 に関する座標は,式⑷を用いて /*!*# 0*!*# 1*!*# ! % # " & $#$! "#$&*! &!*#!!&"* '!*#!!'"* (!*#!!("* ! % # " & $ ⒂ ここで,点 Bbの部品固定座標系に関する座標を[ sinθ cosθ ]と記すと, 式⒂より, -*## /'*!*## "0*!*## ! $ " $ # ⒃ )&'%!#/*!*# -*#!%()%!#0 *!*# -*# が得られる.なお,点 Bbは平面 上に位置するから = である. 以上より,点 Bbの基準座標は次式で与えられる. &!*# '!*# (!*# ! % # " & $# &"* '"* ("* ! % # " & $"!"#$&* $*#)&'%! $*#%()%! ! ! % # " & $ ⒄ ショックアブソーバのベルクランク側取り付け点は Bbであり,車体側取り付け点が EUだから,取り付け長 は ,.)*# &'$!*#!&#%%#" '$!*#!'#%%#" ($!*#!(#%%# ⒅ となる. ・ スタビライザ ・点 Bbに関して: スタビライザ用ロッドのベルクランク側の取り付け部であるピボット Bbの初期位置が,基準座標系で与えられたと き,部品固定座標系 に関する座標は,式⑷を用いて /*!*$ 0*!*$ 1*!*$ ! % # " & $#$! "#$&*! &!*$!!&"* '!*$!!'"* (!*$!!("* ! % # " & $ ⒆ ここで,点 Bbの部品固定座標系における座標を[ sinθ cosθ ]と記すと, 式⒆より, -*$# /'*!*$# "0*!*$# ! $ " $ # ⒇ )&'%"#/*!*$ -*$!%()%"#0 *!*$ -*$ が得られる.なお,点 Bbは平面 上とすると = である. 以上より,点 Bbの基準座標は次式で与えられる. &!*$ '!*$ (!*$ ! % # " & $# &"* '"* ("* ! % # " & $"!"#$&* -*$)&'%" -*$%()%" ! ! % # " & $ ・点 T および点 STに関して: 図 は,座標変換で導出したスタビライザ部の固定座標系 と,その導出過程の座標系および回転角α' , θ を記す.
Fig. 5 Transformation of coordinate systems for stabilizer 系は基準座標系 を平行移動し,原点を点 Tbとした座標系である.したがって,任意点の基準 座標[ ],部品座標系における座標[ ],および点 Tbの基準座標[ ]の間には, # $ % ! % % # " & & $# #"& $"& %"& ! % % # " & & $" )'(& *'(& +'(& ! % # " & $ の関係が成立する.また,式 より次式が得られる. )'(& *'(& +'(& ! % # " & $# #!#"& $!$"& %!%"& ! % # " & $ スタビライザ部の任意点の位置関係が容易に計算できるように, 系を回転させて新たな座標系に変換す る.スタビライザ部の 点が作る△TbTSTが座標系 の つの座標軸が張る平面上に存在するように座標変 換を行い,変換行列は回転角α ,θ を用いて表す. まず, 系を 軸回りにα 回転させた座標系を とする.角度α は,トーションバーの捩れ 軸 TbT が 軸と一致するように定める.ここでは,α を初期値,θ を遥動角とおくとき,全遥動角を α =α +θ とする. 次に 系を 軸回りにθ 回転させた座標系を とする.この時,点 STが平面 上となるよ うに定める.θ はトーションバーの捩れ角を示している. 以上により,部品座標系 で表される任意点を基準座標系に変換する式が得られる. # $ % ! % % # " & & $# #"& $"& %"& ! % % # " & & $" )'(& *'(& +'(& ! % # " & $# #"& $"& %"& ! % % # " & &
$"!"&(&!!(&
)'( *'( +'( ! % # " & $ また, #!#"& $!$"& %!%"& ! % # " &
$# !"&(&!!(&
)'( *'( +'( ! % # " & $ の関係がある.ただし,
!"&(&#! )$'(&#)'("!"(&&%#
" ! !
! #&'"(&&
'$%"(&&
! !'$%"(&&
#&'"(&&
! % % # " & & $ !!(&#! +$'("#+'(!#!%# #&'#! '$%#! ! !'$%#! #&'#! ! ! ! " ! % # " & $
点 T の初期値が基準座標で与えられているとき,式 より次の関係が成り立つ. %$!!%$( &$!!&$( '$!!'$( ! % # " & $# "!&*(!"#*(! ! ! "$( ! % # " & $ ただし, "!&*(!# " ! ! ! %()!*( )&'!*( ! !)&'!*( %()!*( ! % # " & $ "#*(!# " ! ! ! " ! ! ! " ! % # " & $#!! 式 の右辺を展開すると %$!!%$( &$!!&$( '$!!'$( ! % # " & $# "!&*(! ! ! "$( ! % # " & $# ! !"$()&'!*( "$(%()!*( ! % # " & $ が導かれる. したがって,式 の第 , 要素から, )&'!*(#!&$!!&$(
"$( ! $ " $ #%()!*(#'$!!'$( "$( を得る. 式 より,点 T の基準座標は次のように表される. %$ &$ '$ ! % % # " & & $# %$( &$( '$( ! % % # " & & $""!&*( ! ! "$( ! % # " & $ また,点 STの基準座標は式 を用いて %#$ &#$ '#$ ! % % # " & & $# %$( &$( '$( ! % % # " & & $""!&*("#*( ")+ ! "$( ! % # " & $ と表すことができる. スタビライザのベルクランク側取り付け点は Bb,スタビライザ・ステーへの取り付け点が STだから,スタビライザ・ ロッドの長さ は "#$# %'$#$!!%!($!%#" &$#$!!&!($!%#" '$#$!!'!($!%# で与えられる. ・ ピッチング・ダンパ ピッチング・ダンパは,車両のピッチング振動を抑制すると共に,通常のショックアブソーバの補完的な役目を担う. このダンパの取り付け位置をスタビライザ用トーションバー軸上に設けた場合,ダンパは回転角θ が発生するピッチ ング運動のときに作動する.しかし,スタビライザ・ステーにおいてトーションバー軸からオフセットさせて取り付け ると,回転角θ が生じた場合,ダンパ減衰力の分力によりロール運動の動的挙動を抑制する効果が若干ではあるが見 込める. ピッチング・ダンパのスタビライザ・ステー側取り付けピボットである点 PSは,部品座標系 に関して, [ ]=[ ]と与えられたとする. 点 PSの基準座標は,式 を用いれば
&#$ '#$ (#$ ! % % # " & & $# &%) '%) (%) ! % % # " & & $"!!(/)!$/) ! +#$ *#$ ! % # " & $ と表すことができる. また,点 PSが基準座標の初期値で与えられている場合は,式 より, ! +#$ *#$ ! % # " & $#%! !(/)! &#$!!&%) '#$!!'%) (#$!!(%) ! % # " & $ の関係がある. ピッチング・ダンパの車体側取り付け位置が点 PBだから,ピッチング・ダンパの取り付け長 は,次式で与えられ る. ,#$# &'$#$!&#!%#" '$#$!'#!%#" ($#$!(#!%# ベルクランクの遥動角θ が与えられたとき,取り付け長 はスタビライザ・ロッドを介してθ と θ の関数となる. つまり, は左右各輪のホイールストロークにより変化するため, を求める際は次の 通りについて考える必要が ある. 〈Ⅰ〉左右輪のホイールストロークが逆相となり,その絶対値が同じ場合,ロール運動のみとしてθ を求める.(θ = とする) 〈Ⅱ〉左右輪のホイールストロークが同相となり,その絶対値が同じ場合,ピッチング運動のみとしてθ を求める.(θ = とする) 〈Ⅲ〉左右輪のホイールストロークの絶対値が異なる場合,ロール運動とピッチング運動が連成しているとして,θ とθ の 変数を求める. 〈Ⅰ〉∼〈Ⅲ〉の場合ともに,回転角θ または θ を計算するためにスタビライザ・ロッド長 に着目する. 〈Ⅰ〉の場合: スタビライザ・ロッドの取り付け点 Bbと ST間の距離をθ の関数として (θ )とおくと,
"$%-"$ %# &"$ '&$%$ %!&"$ !)$'#" '&$%$ %!'"$ !)$'#" (&$%$ %!("$ !)$'#
で与えられる.そこで, ."$ %#""$ $%-"$ %!""$ $% と定義すると,."$ %= を満足する θ を求める問題に帰着する.近似解 θ の導出には,式⒁において近似解 θ を求"$ めた手順①∼④と同じ方法を用いればよく,ここでは手順②の式のみを記す. "$$-""%#"$$%!- ."&"$$%-' ."(&"$$%-' ただし ."($ %#"$ &$%!&!)$ $ %*&$% *"$" '$$%!'!)$%*' $% *"$" ($$%!(!)$%*( $% *"$ &$%!&!)$ $ %#" ' $%!'!)$ $ %#" ( $%!(!)$ $ %# ' * *"$ &$% '$% ($% ! % # " & $# !!(%)!*!$/) *"$ ".0 ! "%) ! % # " & $, *!$/) *"$ !)&'"$ %()"$ ! !%()"$ !)&'"$ ! ! ! ! ! % # " & $ 以上より,θ の近似解が得られると点 STおよび点 PSなどが確定する.したがって,式 を用いれば〈Ⅰ〉の場合の が計算できる. 〈Ⅱ〉の場合: 〈Ⅰ〉の場合と同様な方法でθ を求める.スタビライザ・ロッドの取り付け点 Bbと ST間の距離をθ の関数として (θ )とおくと,次式で表される.
"#$+#$ %# %#.( '&#$$ %!%#.( !($'#" &&#$$ %!&#.( !($'#" '&#$$ %!'#.( !($'# そこで, -#$ %#"#.( #$+#$ %!"#.( #$ と定義すると, (θ )= を満足する θ を求める問題に帰着する.近似解 θ の導出には,前述の方法を用いればよい. ここでは近似解法の手順②の式のみを記す. #.($+""%##.($%!+ -#&#.($%+' -#)&#.($%+' ただし -#)$ %##.( %#$!%!($ $ %)%#$
)#.(" &$#$!&!($%)& #$ )#.(" '$#$!'!($%)' #$ )#.( %#$!%!($ $ %#" & #$!&!($ $ %#" ' #$!'!($ $ %# ' ) )#.( %#$ &#$ '#$ ! % # " & $#)!").( )#.( "-/ ! "$( ! % # " & $, )!").( )#.( ! ! ! ! !)&'".)( %()".)( ! !%()".)( !)&'".)( ! % % # " & & $ 以上より,θ の近似解が得られると点 STおよび点 PSなどが確定する.したがって,式 を用いれば〈Ⅱ〉の場合の が計算できる. 〈Ⅲ〉の場合: これまでの解析では,左車輪を基準に座標系を構成しており,右車輪に関しては,この座標系をそのまま利用する. そこで,左車輪側でトーションバーの捩れ角がθ ならば,右車輪側は−θ として計算することができる. 以下の各座標では,左車輪側と右車輪側を区別するために,座標値の添字に,それぞれ と を付ける. ◆左車輪側において 点 Bbが確定すると,式 より点 STの座標はθ と θ の 変数で表される.したがって,左車輪側スタビライザ・ロッ ドの取り付け点 Bbと ST間の距離を (θ ,θ )とおくと,次式で表される.
"#$*$##!#.(%# %'&#$*$##!#.(%!%!($*'#" &&#$*$##!#.(%!&!($*'#" '&#$*$##!#.(%!'!($*'#
ここで,x =[ ]はホイールストロークにより決定される.また, "#$*# %#$* &#$* '#$* ! % # " & $# %#$$##!#.(% &#$$##!#.(% '#$$##!#.(% ! % % # " & & $#"#$$##!#.(% と記すことができるから,式 を次のようにベクトル表記する. "#$*$##!#.(%# "(#$*!"!($*(# "(#$$##!#.(%!"!($*( そこで, -$*$##!#.(%#"#$*$##!#.(%!"#$# "(#$$##!#.(%!"!($*(!"#$ と定義する. ◆右車輪側において 左車輪側と同様にして,右車輪側スタビライザ・ロッドの取り付け点 Bbと ST間の距離を (θ ,θ )とおくと,次 式で表される.
"#$,$##!#.(%# %'&#$,$##!#.(%!%!($,'#" &&#$,$##!#.(%!&!($,'#" '&#$,$##!#.(%!'!($,'#
ここで,x =[ ]はホイールストロークにより決定されるが,前提条件により x とは異なるものと する.また,
$#$+$ %#$+ &#$+ '#$+ ! % # " & $$ %#$%!##!#-(& &#$%!##!#-(& '#$%!##!#-(& ! % % # " & & $$$#$%!##!#-(& と記すことができるから,式 を次のようにベクトル表記する. "#$+%##!#-(&$ $)#$+!$!("+)$ $)#$%!##!#-(&!$!("+) そこで,
,"+%##!#-(&$"#$+%##!#-(&!"#$$ $)#$%!##!#-(&!$!("+)!"#$
◆左右車輪のまとめ
式 と式 をまとめて,s =[ ]とおく.s は,θ と θ の 変数関数である.s = を満足する θ と θ を求め る問題に帰着する.Θ =[θ θ ]とおいて,近似解 Θ の導出には, 変数の Newton-Raphson 法を用いる.解法の計 算手順は 変数の場合と同じである.
① 初期値をΘ( )=Θ = とおく.
②!"%*"!&$!"%&!"* !!'!"%&*(##"'!"%&*(
を計算する.ただし,式 の J はヤコビ行列であり,次式で表される. "$ $,%")!,"+& $#%#!#-(&$ $,") $## $,"+ $## $,") $#-( $,"+ $#-( ! % % # " & & $ ③)!"%*"!&!!"%&*)"!が成立する場合は手順④へ進む.成立しない場合は, = + と置換して手順②へ戻る.定 数 E は近似精度に影響するため,できるだけ小さい値に設定しておく. ④!"$!"%*"!&として終了. 以上より,Θ =[θ θ ]の近似解が得られると点 STおよび点 PSなどが確定する.したがって,式 を用いれば〈Ⅲ〉 の場合の が計算できる. .サスペンション特性について ・ リンク・レバー比とホイール端ばね定数 ・ ・ 力・トルク計算のための簡易モデル サスペンションの重要な特性の一つにホイール端ばね定数がある.これを導出するためには,ホイール端の変位(速 度)を入力として,サスペンションばねの変位,ショックアブソーバのピストン速度,およびスタビライザの捩れ角の
各々を出力としたときの入出力の関係が必要となる.加えて,ホイール端に加わる力を入力として,サスペンションば ね力,ショックアブソーバ減衰力およびスタビライザの捩りトルクを出力としたときの入出力の関係も必要である. これら つの入出力の関係において,前者の変位・角度の関係を計算する方法は既に前章に記した.ここでは導出す る入出力関係の見通しをよくするため,計算で求めた関係を線形近似して用いることにする.また,後者の力・トルク の関係は,図 に示すような単純化した解析モデルを用いて導出する. 図 において,リンク・レバー比ρ は ρ= / ,角度は θ =α +α ,θ =α +α の関係がある. ・ ・ サスペンションばねについて 図 のタイヤ上下力 とサスペンションばね力 の関係は次式で表される. !+$ !/*!(+,!&""!#' #/*",)*!!,)*!&&"!'' 一方で,サスペンションばねの単体ばね定数を ,取り付け長の変化をΔ ,サスペンションばねによるホイール端 ばね定数を ,およびホイールストローク変化をΔ とすると, = sΔ と = Δ の関係がある.この つの 式を式 に代入して, についてまとめると, -'+$#/*",)*!!,)*!&&"!''-0%.0)* /*!(+,!&""!#'#%(' を得る. そこで,前章の計算結果をもとにΔ ≒ρ Δ の線形性を仮定すると,式 は次式で表される. -'+$##+/*",)*!!,)*!&&"!''-0 /*!(+,!&""!#' ただし,ρ はサスペンションばねの取り付け長の変化とホイールストロークの比を示しており,これもリンク・レバー 比に相当する. なお,ショックアブソーバはサスペンションばねと同軸で取り付けられていることを前提としており,この場合の入 出力の関係は式 で表される. 次に,スペース効率向上を目的にサスペンションばねをコイル・スプリングからトーションバー・スプリングに置き 換えた場合について考える.トーションバーはベルクランクの回転軸に設けるものとする. タイヤ上下力 とベルクランク回転軸部のトルク との関係は次式で表される. &*$!/*"(+,!&""!#' #,)*!! 一方で,トーションバーの横弾性係数を ,断面 次極モーメントを とすると, &*$"#%*"* ,*( の関係がある. 式 と式 および = Δ の関係を用いて,トーションバーによるホイール端ばね定数 を求めると, -'+1$ #"#%*,)*!!#"* /*",*((+,!&""!#'%(' を得る.前章の計算結果をもとにθ ≒ρ Δ の線形性を仮定すると,式 は次式で表される. -'+1$ ##*"#%*,)*!! /*",*((+,!&""!#' ただし,ρ はトーションバーの捩れ角とホイールストロークの比を示す. ・ ・ スタビライザについて ロール運動時におけるタイヤ上下力 とスタビライザ・ロッド軸力 の関係は次式で表される. !0$ !/*!(+,!&""!#' #/*#,)*!!,)*!&%!!$' また,スタビライザのトーションバーの捩りトルクを ,断面 次極モーメントを とすると, &0$"!0$02(+,!%$"#%"0 $&*
の関係がある.
式 ,式 および = Δ の関係を用いて,スタビライザによるホイール端ばね定数 を求めると次のようにな る.
.)1$ $"#&0+#*'(!!*'(!&%!!$'##1
"%13%(+0+!&)*!&""!#'&)*!%#%*)
前章 ・ 〈Ⅰ〉の場合の計算結果をもとに,θ ≒ρ Δ の線形性を仮定すると,式 は次式で表される. .)1$ $$1"#&0+#*'(!!*'(!&%!!$'
"%13%(+0+!&)*!&""!#'&)*!%
ただし,ρ はスタビライザの捩れ角 θ とホイールストロークの比である. ・ ・ ピッチング・ダンパについて 前章 ・ 〈Ⅱ〉のピッチング運動のみの場合について考える.スタビライザ・ロッドの軸力 により,点 Tbを含 む車体側取り付け回転軸回りに生じるトルクを ,およびピッチング・ダンパ軸方向の力を とすると,次の関係が 成立する. (/$"!1%(+&)*!% (/$!--&' 式 と式 より, !-$"!1%(+&)*!% -&' となる.式 に式 を代入すると !-$"!%(+0+!&)*!&""!#'&)*!%
$-&'0+#*'(!!*'(!&%!!$' が得られて,タイヤ上下力 と の関係が明らかになる. また,ピッチング・ダンパの取り付け長の変化をΔ とすると,前章 ・ 〈Ⅱ〉の場合の計算結果をもとにして, Δ ≒ρ Δ の線形性を仮定することが可能である.ただし,ρ は定数とする. ・ ロール剛性 サスペンションばねとスタビライザによるロール剛性をそれそれ φ, φとすると, $",$! ".),2",$"1$! ".)12" で与えられる.ただし, はトレッド. したがって,全ロール剛性 φは次式で表される. $"$$","$"1$! " .&),".)1'2" 式 , および式 より明らかなように,車体のロール剛性は,ばね単品の特性だけでなく,リンク・レバー比やベ ルクランク上のロッドおよびサスペンションばね取り付け位置等も大きな影響を及ぼすことがわかる.なお,式 の右 辺において, は式 で与えられるトーションバーの に置き換えることができる. ・ 考察 サスペンション機構を単純化した解析モデルを用いて,サスペンションばねとスタビライザによるホイール端ばね定 数をそれぞれ式 , と式 に示した.また,ショックアブソーバおよびピッチングダンパによるホイール端の減衰力 特性についても,式 と式 を用いてそれぞれ簡単に算出できる.これらの特性は,車両のバウンシングやピッチング 運動の解析では必要不可欠のものである. また,ホイール端ばね定数を単純な一定値として表すことができたため,ロール剛性も式 で求められることになる. このように,ベルクランク機構を有するサスペンションのばね,ダンパ特性およびロール剛性の計算式を明らかにし たので,車体姿勢変化の動的解析に留まらず,車両ステア特性の解析( )( )も容易に可能となる. ただし,この方法は前提条件としてホイールストロークが小さい場合を想定しており,ホイールストロークが大きく なると単純化モデルが成立せず,ばねやダンパ特性の非線形性が強くなるために計算結果の信頼性は低下する.しかし,
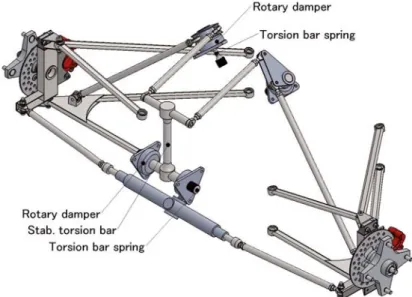
Fig. 7 Suspension mechanism using torsion bar springs and rotary dampers 本来ベルクランク機構を有するダブルウィッシュボーン式サスペンションはレーシングカーに採用されることが多く, ホイールストロークも一般的な乗用車に比べて極端に小さいために,前提条件は妥当なものと考えることができる. ところで,これまではピッチング制御のためにピッチング・ダンパを用いる方式について述べた.しかし,このピッ チング・ダンパに替えて,スタビライザの車体側取り付け回転軸部をトーションバーとしてばね効果を持たせ,付け根 部にロータリ・ダンパ( ) を用いれば,スペース効率を向上が図れてピッチング制御ための設計自由度も大きくすること が可能になる.この新方式の概要図を図 に示す.この場合のトーションバーによるホイール端ばね定数 を求めて おく. まず,トーションバーの捩り角とトルクの関係より, ! "&+$"#%!".) $-/ または &+$""# %!".) $-/ が成立する.ただし, は断面 次極モーメントである. 式 , および式 より, !$#"#%!,)#*'(!!*'(!&%!!$'#".)
$-/$&),)!&)*!&""!#'&)*!%
が導出される.この式に, = Δ の関係を代入してκ を求めると, *'+$ #"#%!,)#*'(!!*'(!&%!!$'#".)
$-/$&),)!&)*!&""!#'&)*!%#%('
を得る.
前章 ・ 〈Ⅱ〉の場合の計算結果をもとに,θ ≒ρ Δ の線形性を仮定すると,式 は次式で表される. *'+$##.)"#%!,)#*'(!!*'(!&%!!$'
$-/$&),)!&)*!&""!#'&)*!%
ただし,ρ はトーションバの捩れ角 θ とホイールストロークの比である. ピッチング制御はフロントおよびリヤ・サスペンション双方の特性と密接な関係があるうえに,サスペンション・ジ オメトリによるアンチ・ダイブ効果等も無視できない( )( ).このピッチング制御が車両運動性能に及ぼす影響を解析し てサスペンション特性の具体的な設計手法を明示することは今後の課題である. .ま と め ベルクランク機構を有するダブルウィッシュボーン式サスペンションに関して,サスペンションばねとダンパ特性の 解析が簡便に行えるような計算方法の検討を行い,以下の結果を得た. ⑴ サスペンションばね,ショックアブソーバ,スタビライザおよびピッチング・ダンパのリンク幾何について,機構 学理論を基にした計算モデルとそのアルゴリズムを構築した.
⑵ ⑴の計算結果を基にして求めた変位・角度の入出力関係の線形近次式と,ベルクランク周りの構成を模した単純な 線形計算モデルから求めた力・トルクの入出力関係式とを用いて,サスペンションばねとスタビライザ各々のホイー ル端ばね定数,ロール剛性の計算式を示した.また,ショックアブソーバおよびピッチング・ダンパのホイール端に おける減衰力の計算式も示した. ⑶ ⑵で導出した式により,ばね・ダンパ単体特性のみではなく,レバー比やベルクランク上のロッドおよびサスペン ションばね等の取り付け位置もサスペンション特性に大きな影響を及ぼすことを明らかにした. ⑷ ピッチング制御に関しては,スペース効率や設計自由度を大きくする観点から,ピッチング・ダンパに替えてロー タリダンパとトーションバーを採用する方式を提案し,この新方式のホイール端ばね・ダンパ特性の計算式を示した. 本研究に関して,今後の課題としては次の内容があげられる. ・具体的な車両およびサスペンション/ステアリングに関する諸元データをもとに解析および設計計算を行い,本報告 で提案した計算方法の妥当性を示す. ・今回は力・トルクの入出力関係を簡易な計算モデルを用いて導出したが,このモデルは 次元モデルとして近次した ものである.これにより導出した計算式は,各種パラメータがどのようにサスペンション特性に影響を及ぼすかを検 討する際に直感的で把握しやすい利点がある.しかし,ベルクランクおよびリンク類を XY 平面(水平面)に対して 大きな角度で配置した際は,十分な計算精度が得られない可能性がある.精度向上のために,機構学理論を直接用い て力・トルクの入出力関係を 次元ジオメトリで導出する方法を示す. ・ベルクランクやリンク等は,全て剛体として取り扱ったが,実際は車体側取付け部を含めて柔性を有しており,サス ペンション/ステアリング系および車体の剛性を考慮したサスペンション特性の機構解析を行う. ・考察で取り上げたピッチング制御に関する解析 などである. .あとがき 本論文を執筆するにあたり,交通機械工学科 年の稲永基希君には D-CAD を用いた図の作成で協力をいただいた. ここに感謝の意を表する. 文 献 ⑴ 森和典,“走行系の統合制御を適用した車両の運動性能”,日本機械学会論文集C編,Vol. ,No. ( ‐ ),pp. ‐ . ⑵ 檜垣和夫,F 最新マシンの科学( ),pp. ‐ ,講談社. ⑶ 森和典,“サスペンション・ステアリング幾何の計算法に関する考察”,久留米工業大学研究報告,No. ( ‐ ),pp. ‐ . ⑷ 森和典,“四輪操舵車の旋回運動時操舵応答性の解析”,日本機械学会論文集C編,Vol. ,No. ( ‐ ),pp. ‐ . ⑸ 藤岡健彦,鎌田実,自動車プロジェクト開発工学( ),pp. ‐ ,技報堂出版. ⑹ 亘理厚,機械振動( ),pp. ‐ ,丸善株式会社.
⑺ Donald Bastow, Geoffrey Haward and John P. Whitehead, Car Suspension and Handling (Fouth Edition) (2004), pp.158-162, SAE international.
⑻ 森和典,“うねり路走行時における車両旋回性能の解析(第 報:懸架系リンク幾何特性の影響)”,久留米工業大学研究報告, No. ( ‐ ),pp. ‐ .
〔論 文〕
高過給多気筒ディーゼルエンジンにおける
排熱回生の基礎研究
山口 卓也
*Fundamental Study of Waste Heat Recovery
in the High Boosted Multi-Cylinder Diesel Engine
Takuya YAMAGUCHI
*Abstract
In heavy duty diesel engine, waste heat recovery has attracted much attention as one of technologies to improve fuel economy further. In this study, he combined cycle of a diesel cycle and Rankine cycle is focused as the waste heat recovery technology of a diesel engine for heavy-duty commercial vehicles. And the effect of combined cycle on fuel economy was evaluated in single-stage turbocharging system and second-stage turbocharging system. As a result of estimation, the improvement in fuel economy by combined cycle was estimated 2.7% (single-stage turbocharging system) and 2.9% (2-stage turbocharging system), when heavy duty vehicle (GVW=24980 kg) was assumed to cruise at 80 km/h on high way.
Key Words:heat engine, compression ignition engine, efficiency, fuel economy
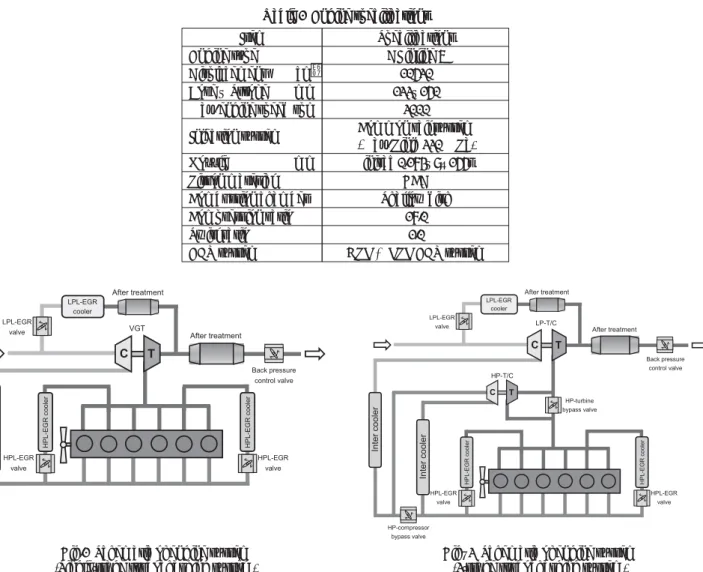
.はじめに ディーゼルエンジンは熱効率が高く CO の排出が少ない内燃機関である.近年,ディーゼルエンジンは地球温暖化抑 制およびエネルギーセキュリティーの観点から更なる燃料消費の改善が強く求められている.ディーゼルエンジンの更 なる燃料消費の改善策として,エンジンのダウンサイジング・ダウンスピーディングなどのエンジン本体の高効率化に 加えて,排熱エネルギの回生技術が注目され,メーカー,研究機関や大学などで盛んに研究されている( )∼( ) . 近年,大型ディーゼルエンジンは機械損失の少ない低速域における高 BMEP 化を実現するために,従来の単段過給 システムに小型過給機を追加した 段過給システムの採用が試みられている( ) .また,燃費低減と NOx の低減を両立 させるために,ハイプレッシャループ EGR システム(以下 HPL-EGR システム)およびロープレッシャループ EGR シ ステム(以下 LPL-EGR システム)の組み合わせが研究されている( ) .既報( ) では高過給ディーゼルエンジンからの排 熱の有効エネルギ解析を行い高過給ディーゼルエンジンンお排熱回生よる熱効率改善のポテンシャルを評価した.実際 にエンジンからの排熱を回収し有効仕事へ変換するためには,ターボコンパウンドや熱電素子,ランキンサイクルなど の排熱回生技術が必要とされる.本研究では,高過給ディーゼルエンジンからの排熱が過熱ランキンサイクルを用いた コンバインドサイクルにより排熱回生されたと想定した際の燃費改善の効果について予測検討を行う. .実験装置 ・ 研究用多気筒エンジン 実験に使用したエンジンの諸元を表 に示す.エンジンは最高噴射圧力 MPa 仕様のコモンレール式燃料噴射装置 を搭載した排気量 . L の直列 気筒エンジンである.図 は単段過給システム仕様のエンジン概略図,また,図 は 段過給システム仕様のエンジン概略図である.単段過給システムおよび 段過給システムは,HPL-EGR システム と LPL-EGR システムを組み合わせたデュアルループ EGR システムを採用している.図 に示す 段過給システムは, * 交通機械工学科 原稿受付 年 月 日