空間起磁力分布に着目した
CSI 駆動集中巻 IPMSM のトルク脈動抑制法
学生員
川井 由宇
正 員芳賀 仁
上級会員近藤 正示(長岡技術科学大学)
Torque Ripple Suppression Method of Current Source Inverter for
IPMSM with Concentrated Winding based on Spatial MMF Distribution
Yuu Kawai, Student Member, Hitoshi Haga, Member, Seiji Kondo, Senior Member (Nagaoka University of Technology)
In this paper, a torque ripple suppression method for IPMSM with concentrated winding based in spatial magnetomotive force (MMF) distribution is proposed. The proposed superimposed harmonic method can suppress the torque ripple compared to the conventional sine-wave method. Experimental results are shown in the validity of the proposed method.
キーワード:トルク脈動抑制,集中巻,空間高調波,電流形インバータ
Keywords:Torque ripple suppression, Concentrated winding, Spatial harmonics, Current Source Inverter
1. はじめに 集中巻永久磁石同期電動機(IPMSM)は高効率化,小型 化,コスト低減化技術として様々な産業に応用されている。 しかし,分布巻に比べ空間高調波を多く含むため大きなト ルク脈動が生じてしまう問題がある。この集中巻 IPMSM の トルク脈動抑制方法として,電動機構造を改良する手法と 追加的な制御を導入する手法が提案されている(1)~(4)。本稿で は電機子巻線の空間起磁力分布(5)~(6)に着目したトルク解析 を行い,この結果から電流形インバータの指令電流に対し て適切な高調波を重畳することでトルク脈動を抑制する制 御法を提案する。実験により,提案法は正弦波駆動に比べ 6 次のトルク脈動を抑制できる結果を得た。 2. 電流形インバータの特徴 一般的には電圧形インバータを用いて電流制御してモー タ駆動している。しかし,電圧形インバータはフィードバ ックにより電流を制御するため応答に限界があり,更に速 度起電力による外乱の影響を受けてしまう。電流形インバ ータは直接電流を操作でき速度起電力による影響を受けに くい利点がある。 図1 に電流形インバータを用いたモータ駆動システムの回 路構成を示す。提案するトルク脈動抑制法は空間高調波の 影響を時間高調波電流で改善する手法であり,回転子の位 置情報に対して正確な位相の時間高調波電流を重畳するこ とでトルク脈動を抑制する。提案法には電流制御帯域を考 慮する必要がなく直接電流を操作できる電流形インバータ を用いる。 3. トルク脈動の解析 〈3・1〉 空間起磁力分布 電機子により回転機内に生じ る起磁力分布は印加する各相の電流と対応する起磁力分布 係数によって決定する。この起磁力分布は電機子が作り出 す磁束特性と密接な関係にあり,起磁力の変動はトルク脈 動の原因となる。まず,分布巻と集中巻の起磁力分布の違 いを述べる。ここで各相の電流iu,iv,iwはそれぞれ(1)式と する。(以降,表記の簡易化のために三相電流は(2)式に示す 瞬時空間電流ベクトルI 3で表記する。)
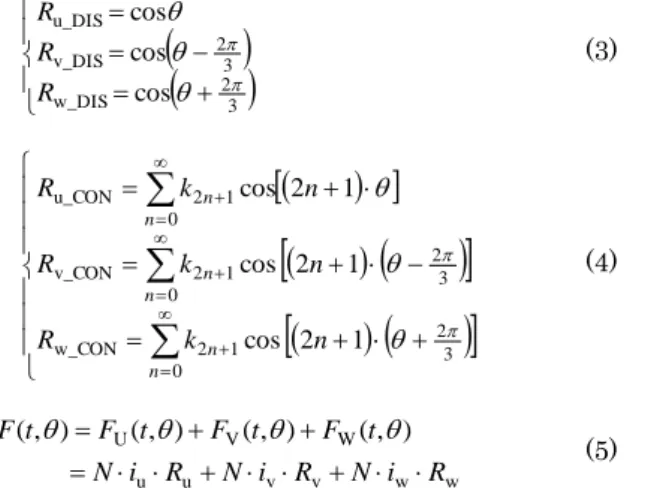
3 2 m w 3 2 m v m u cos cos cos t I i t I i t I i (1) t j e I I3 m 2 3 (2) 分布巻と集中巻における各相の電流に対応する起磁力分布 係数はそれぞれ(3),(4)式となる。ここで, は図 2 に示す ように電機子巻線モデルに対応する。合成起磁力分布は各 相の電流と対応する起磁力分布係数Ru,Rv,Rwを用いて(5) 式と表せる。ここで,N は一相あたりの巻数を意味する。 図1 回路構成そして,(3)式に示す分布巻の Ru_DIS,Rv_DIS,Rw_DISと(4) 式に示す集中巻の Ru_CON,Rv_CON,Rw_CONはそれぞれ(5) 式のRu,Rv,Rwに対応する。
3 2 w_DIS 3 2 v_DIS u_DIS cos cos cos R R R (3)
0 3 2 1 2 w_CON 0 3 2 1 2 v_CON 0 1 2 u_CON 1 2 cos 1 2 cos 1 2 cos n n n n n n n k R n k R n k R (4) w w v v u u W V U(, ) (, ) (, ) ) , ( R i N R i N R i N t F t F t F t F (5) ここで,一相あたりの起磁力分布について説明する。図3 は図2 の U 相電流に対応した起磁力分布FU ((5)式の右辺第 1項)である。図 3 は,起磁力分布の空間的な変化と時間的 な変化を示す。図 3(a)に示すように分布巻の起磁力分布は 空間高調波を持たないため正弦波状となり,図 3(b)に示す ように集中巻の起磁力分布は空間高調波により歪む。 次に,三相全ての合成起磁力分布について説明する。分 布巻の合成起磁力分布FDIS(t,)は(5)式と(2),(3)式を用いる と(6)式のように求められる。同様に,集中巻の合成起磁力 分布FCON(t,)は(5)式と(2),(4)式を用いて(7)式のように求 められる。但し,空間調波は7 次以下のみを考慮している。
NI t t F cos 2 3 ) , ( m DIS (6)
7 cos 5 cos cos 2 3 ) , ( 7 5 1 m CON t k t k t k NI t F (7) 図4 は三相電流全てに対応した合成起磁力分布を示す。 但し,図4 は(6),(7)式のt =0 における合成起磁力分布を示 している。図4 のように合成起磁力分布は各相の起磁力分 示したものである。このように,分布巻の起磁力分布は時 間変化によらず同一波形であるが,集中巻の起磁力分布は 時間変化に伴い波形が変化する。 以降に,これまで示してきた起磁力分布の考え方を用いて 空間調波と時間調波を考慮したdq軸上の電流量を考える。 (a)分布巻 (b)集中巻 (a)Distributed winding (b)Concentrated winding図2 電機子巻線モデル Fig.2. A model of armature winding
(a)分布巻 (a)Distributed winding
(b)集中巻
(b) Concentrated winding 図5 起磁力分布の時間変化 Fig.5. Time transition of MMF distribution
(a)分布巻 (b)集中巻 (a)Distributed winding (b)Concentrated winding
図4 回転機内の合成起磁力分布 Fig.4. Synthetic MMF distribution of motor
(a)分布巻 (b)集中巻 (a)Distributed Winding (b)Concentrated Winding
図3 一相辺りの回転機内の起磁力分布:FU Fig.3. MMF distribution of one phase
〈3・2〉 dq 軸に作用する起磁力 一般にIPMSM では リラクタンストルクを活用するため電機子電流はdq軸にお いて位相差を持たせる。(8)式にこの電機子電流を示す。 j t e I I3 m 2 3 (8) したがって位相差 を考慮すると,(6),(7)式はそれぞれ (9),(10)式になる。
NI t t F cos 2 3 ) , ( m DIS (9)
7 cos 5 cos cos 2 3 ) , ( 7 5 1 m CON t k t k t k NI t F (10) そして図 6 は回転子を考慮した電機子巻線モデルである。 なお,dq 軸上の起磁力の位相関係はそれぞれ図 6 のd,q に示すとおりである。瞬時空間電流ベクトル(8)式の位相 (t+)に対応するd,qはそれぞれ(11)式である。 t t q d 2 (11) 図6 と(11)式より起磁力分布とdq軸の位相関係は図7 の ように示すことができる。(9),(10)式に(11)式を用いると分 布巻と集中巻のdq軸の起磁力は(12),(13)式となる。 cos 2 3 ) , ( ) ( sin 2 3 ) , ( ) ( m DIS _DIS m 2 DIS _DIS NI t F t F NI t F t F t q t d (12)
t k t k k NI t F t F t k t k k NI t F t F t q t d 6 cos 6 cos cos 2 3 ) , ( ) ( 6 in s 6 in s in s 2 3 ) , ( ) ( 7 5 1 m CON _CON 7 5 1 m 2 CON _CON (13) (12),(13)式より,dq軸上の起磁力の時間変化を図8 に示 す。図8 より集中巻においてdq軸の起磁力が6 次調波で変 動していることが判る。 (a)分布巻 (b)集中巻 (a)Distributed winding (b)Concentrated winding図6 回転子を考慮した電機子巻線モデル Fig.6. A model of armature winding with rotor
(a)分布巻 (a)Distributed winding
(b)集中巻
(b) Concentrated winding 図7 起磁力分布とdq軸の時間変化
Fig.7. Time transition of MMF distribution and dq- axis
(a)分布巻 (a)Distributed winding
(b)集中巻 (b)Concentrated winding 図8 空間調波を考慮したdq軸
分布巻における(12)式と集中巻における(13)式のdq 軸上の 起磁力より,空間調波を含む電流量を考えると,それぞれ の電流量は(14),(15)式と求まる。 cos 2 3 ) ( ) ( sin 2 3 ) ( ) ( m _DIS _DIS m _DIS _DIS I N t F t i I N t F t i q q d d (14)
t k t k k I N t F t i t k t k k I N t F t i q q d d 6 cos 6 cos cos 2 3 ) ( ) ( 6 in s 6 in s in s 2 3 ) ( ) ( 7 5 1 m _CON _CON 7 5 1 m _CON _CON (15) このように(15)式に生じる 6 次高調波は時間調波の位相 差に応じて5 次係数k5に対しては進み,7 次係数k7に対 しては遅れの位相差になる。以降,(14),(15)式で示した 空間調波を含むdq軸上の電流量を用いてトルク解析する。 〈3・3〉 空間調波を考慮した集中巻 IPMSM のトルク (16)式に IPMSM のトルク式を示す。右辺第一項がマグネッ トトルクに,第二項がリラクタンストルクに対応する。但 し,p,f,Ld,Lqはそれぞれ極対数,回転子磁束,d軸イ ンダクタンス,q軸インダクタンスである。
qd q d q fi L L i i p T (16) 分布巻と集中巻の空間調波を含む電流量を意味する(14), (15)式は相対変換値に対応する形のため,次式(17)式を用い て絶対変換値にする。なお,以降は計算の簡易化のため, この絶対変換値をIとする。 I I Im m 2 3 2 3 (17) (17)式を適用して(14),(15)式を(16)式に代入すると分布巻 と集中巻のトルクはそれぞれ(18),(19)式となる。
sin2 2 1 cos 2 DIS p I L L I T f q d (18)
2 12 sin 2 2 12 sin 2 6 sin 6 cos 6 cos 2 sin 2 cos 2 2 7 2 2 5 2 7 5 1 7 5 2 7 5 7 1 1 CON t I L L k t I L L k t I L L k k k t I k t I k I L L k k k I k p T d q d q d q f f d q f (19) 一般的にk1>k5かつk1>k7であることから,(19)式の集中 巻におけるトルク脈動の主成分は 6 次調波成分であり,位 相差によって特性変化することが判る。 4. 提案するトルク脈動抑制のための電流指令値 〈4・1〉 高調波重畳によるトルク脈動抑制法 3 章で集 中巻におけるトルク脈動の主成分は 6 次調波であることを 示した。(19)式において 6 次調波のトルク脈動は右辺第 3~ 5 項である。本稿では,(19)式に示す空間高調波によるトル ク脈動を相殺するための電流指令値を提案する。なお,提 案法は,空間高調波によるトルク脈動に対して時間高調波 を重畳することで抑制する。そのためには,重畳する高調 波電流による空間高調波の影響も考慮する必要がある。な お,6 次調波のトルク脈動に対応する電流重畳項は 5 次調波 と7 次調波である。 〈4・2〉 高調波重畳を考慮した起磁力分布 (8)式に対し て5 次調波と 7 次調波を重畳した合成調波を(20)式に示す。 (20)式において基本波項と重畳波項に対応する起磁力分布 係数はそれぞれ異なり,基本波項に対応する起磁力分布係 数(4)式を基準にとると重畳波項に対応する起磁力分布係数 は位相差が生じる。これを考慮すると,(15)式に対応する 5 次と 7 次のdq軸高調波電流量はそれぞれ(21),(22)式の ように求められる。
I ej t I e j t I ej t
Iref m m5 5 m7 7 2 3 (20)
7 12 cos 5 cos 6 cos 2 3 7 12 sin 5 sin 6 sin 2 3 7 5 1 5 m _CON 5 7 5 1 5 m _CON 5 t k k t k I t i t k k t k I t i q d (21)
7 cos 5 12 cos 6 cos 2 3 7 sin 5 12 sin 6 sin 2 3 7 5 1 7 m _CON 7 7 5 1 7 m _CON 7 k t k t k I t i k t k t k I t i q d (22) ここで,(15)式と(21),(22)式を比較すると 6 次調波を相 殺できる重畳項の係数は(23)式と求まる。 m 1 7 7 m m 1 5 5 m , I k k I I k k I (23) (23)式の値を用いて(15)式に(21),(22)式を重畳すると,こ の空間調波を含む電流量は(24)式で表される。(24)式は 5 次 と7 次の時間高調波重畳で 6 次調波項を相殺できる。 図9 はdq軸における計算結果である。なお,図9 は図 8 と比較するために起磁力を用いて表記している。時間高調 波重畳前の図8(b)と重畳後の図 9 を比較すると,重畳後は dq軸上の6 次調波の電流量の変動幅が小さくできている。 また,5 次と 7 次の時間調波重畳のため,重畳前より高次の 高調波成分が生じているが,元の6 次脈動に比べ脈動成分 は小さい。つまり,本手法はトルクに作用する電流量の空間高調波成分を抑制することでトルク脈動を抑制できる。
7 12 sin 5 12 sin 7 sin 5 sin sin 2 3 7 12 cos 5 12 cos 7 cos 5 cos cos 2 3 1 7 5 1 2 7 1 2 5 1 m _CON 7 _CON 5 _CON SUP_CON 1 7 5 1 2 7 1 2 5 1 m _CON 7 _CON 5 _CON SUP_CON t t k k k k k k k k I t i t i t i t i t t k k k k k k k k I t i t i t i t i q q d d q q q q (24) 5. トルク脈動抑制法 〈5・1〉 起磁力分布係数の測定 電機子巻線による空間 調波を意味する起磁力分布係数を測定することは困難であ るが,3 章で求めた集中巻のトルク(19)式を用いて 7 次以下 の起磁力分布係数を簡易的に測定できる。以下にその方法 を述べる。(19)式を(25)式の条件下で(26)式に近似する。
d q f L L k I 1 (25)
t I k t I k I L L k k k I k p T f f d q f 6 cos 6 cos 2 sin 2 1 cos 7 5 2 7 5 7 1 1 CON (26) (26)式を用いると=のトルクは(27)式で表すことができ る。同様に,≠のトルクはk5≫k7である場合は(28)式に 近似できる。
t I k k I k p TCON 1
f 5 7
f cos6
(27)
t I k I L L k k k I k p T f d q f 6 cos 2 sin 2 1 cos 5 2 7 5 7 1 1 CON (28) トルク測定によりそれぞれの6 次成分を測定することで, (27)式の第 2 項によりk1,k5+k7が,(28)式の第 3 項よりk5 が求まる。 〈5・2〉 提案する制御法 本稿では,(20),(23)式と して明らかにしたトルク脈動抑制のための電流指令値を忠 実に重畳するために,電流形インバータを用いて実験する。 図10 に提案する制御ブロック図を示す。ここで,ICSIはDC リンク電流,m は電流形インバータの変調度で(29)式である (Imは瞬時空間電流ベクトルの最大値)。位相角は最大トル ク制御に使用される(30)式を用いて決める。その後,(20), (23)式より求めた(31)式による演算を行うことでトルク脈 動の原因となる空間調波を相殺するため時間調波を重畳し た電流指令値I refが生成できる。 CSI m m I I (29)
m 2 m 2 1 4 8 sin I L L I L L d q d q f f (30) j t j t ej t k k e k k e I I 7 1 7 5 1 5 m ref 2 3 (31) 〈5・3〉 実験結果 表 1 の回路定数で従来の正弦波駆動 と提案法を適用した高調波重畳駆動のトルク特性比較を行 った。fVI,fCSI,R はそれぞれ 2 象限チョッパのスイッチン グ 周 波 数 , 電 流 形 イ ン バ ー タ の ス イ ッ チ ン グ 周 波 数 , IPMSM の電機子巻線抵抗を示す。 表1 回路定数 Table 1. Circuit ConstantVDC 100 [V] p 2 [poles] LCSI 5 [mH] f 0.19 [Wb] C3 1 [F] R 1 [] fVI 50 [kHz] Ld 8 [mH] fCSI 20 [kHz] Lq 20 [mH] 図 11 は実験より求めた一相辺りの起磁力分布係数を示 し,(4)式に対応する。但し,7 次調波以下の空間調波しか 考慮していない。再現に用いた測定値はk1=1.0,k5=-0.1, k7=0.05 である。 図9 集中巻における提案法の効果 Fig.9. Effect of proposed method
図10 トルク脈動抑制の制御ブロック図 Fig.10. Control block diagram of
図 12 に速度を変化させたときのトルク脈動の特性を示 す。ここで,図12 におけるT0はトルク出力の平均値,T6 は 6 次のトルク脈動成分を示す。なお,使用したモータ試 験台は750[rpm]付近に機械共振点がある。図 12 より,速 度条件が変化してもトルク脈動抑制効果を確認できた。図 13 に従来法と提案法による U 相電流波形とトルク出力特性 を示す。図13 より,高調波重畳によるトルク脈動抑制効果 を確認できる。 6. おわりに 本稿では電機子巻線の空間起磁力分布に着目したトルク 解析を行い,この結果から電流形インバータの指令電流に 対して適切な高調波を重畳することでトルク脈動を抑制す る制御法を提案した。そのために,電機子巻線による起磁 力分布に着目し,空間高調波を含む電流量を検討した。こ れにより空間調波を考慮したトルク特性を解析できた。こ の結果を元に電流の時間高調波を重畳することで空間高調 波の影響を緩和させトルク脈動を抑制する方法を提案でき た。実験では,dq 軸に対して位相差が生じた場合と可変 速の条件下で提案法と従来の正弦波駆動を比較して,提案 法は正弦波駆動に比べトルク脈動を抑制できることを確認 できた。本稿では IPMSM の回転子磁束鎖交数の着磁特性 に起因する空間高調波を考慮していない。今後の課題とし て,回転子側と固定子側の空間高調波を考慮した検討を行 う予定である。 文 献 (1) 吉川祐一・檜脇英治・玉村俊幸・舟津哲司:「埋め込み磁石形集中巻 ブラシレスモータの高効率化技術」,松下テクニカジャーナル, Vol.51,No.1,pp.65-69 (2005) (2) 吉本貫太郎・北島康彦・塚本雅裕・篠原俊郎:「IPMSM の高調波電 流制御」,平成15 年電気学会産業応用部門大会,No.1-81 (2003) (3) 千切建史・嶋田武史・渡邊忠昭・一ノ倉理・秦泉寺敏正:「ブラシレ スDC モータのゼロトルクリプル・最大効率化電流制御法」,電学論 D,Vol.116,No.12,pp.1276-1282(1996) (4) 大森洋一・萩原茂教・北条喜久:「周期外乱オブザーバによる集中巻 IPMSM の制御」,東洋電機技報,第 114 号,pp.1-6 (2006) (5) 難波江章・金東海・高橋勲・仲村節男・山田速敏:「基礎電気機器学」, オーム社,pp.68-74(1985) (6) 難波江章・金東海・高橋勲・仲村節男・山田速敏:「電気機器学」, オーム社,pp.45-49(1985) (a)正弦波 (a)Sine-wave (b)高調波重畳 (b)Superimposed harmonic 図13 U 相電流及びトルク出力特性
Fig.13. Characteristic of U phase Current and Torque 0.8355[Nm/div] 2.0[A/div] 10.0[ms/div] 0.8355[Nm/div] 2.0[A/div] 10.0[ms/div] 0 0 0 0 Torque U phase Current Torque U phase Current
(a) ICSI=3[A]
(b) ICSI=5[A] 図12 トルク脈動抑制効果
Fig.12. Effect of Torque Ripple Suppression 図11 実験結果より推定される起磁力分布係数

![図 12 に速度を変化させたときのトルク脈動の特性を示 す。ここで,図 12 における T 0 はトルク出力の平均値, T 6 は 6 次のトルク脈動成分を示す。なお,使用したモータ試 験台は 750[rpm]付近に機械共振点がある。図 12 より,速 度条件が変化してもトルク脈動抑制効果を確認できた。図 13 に従来法と提案法による U 相電流波形とトルク出力特性 を示す。図 13 より,高調波重畳によるトルク脈動抑制効果 を確認できる。 6](https://thumb-ap.123doks.com/thumbv2/123deta/5766530.529640/6.892.481.790.80.634/におけるトルクトルクモータトルクによる示す図によるトルク.webp)
