論 文
工場設備の故障予測における Autoencoder を用いた異常度算出手法の 分析 *
朝日 翔太
†a)松井 彩華
†田村 哲嗣
†速水 悟
†井指 諒亮
††古川 輝
††内藤 孝昌
††Analysis of Abnormality Calculation Methods Using Autoencoders in Failure Prediction for Factory Equipment
∗Shota ASAHI
†a), Ayaka MATSUI
†, Satoshi TAMURA
†, Satoru HAYAMIZU
†, Ryosuke ISASHI
††, Akira FURUKAWA
††, and Takayoshi NAITOU
††あらまし 本研究では,機械設備から得られた振動データを用いて,深層学習の一手法であるAutoencoder (AE) の再構成誤差から異常度を算出し,その推移によって故障予測を行うモデルを構築する.本論文では,異常度算 出のための3種類のAEを構築し,それぞれのモデルにおいて異常度算出にどのような特徴が現れるかを調査 し,振動データの生波形を入力としたend-to-end異常度算出手法による故障予測の有効性を考察する.実際の機 械設備より得られた振動データにより学習及び異常度算出を行い,各ネットワーク構造,及び入力データのもつ 特性により異常度の推移やモデル性能にどのような差がみられるかを検証する実験を行った.その結果,いずれ のモデルにおいても異常度の推定が可能であることが分かった.一方で,ネットワーク構造や入力データの特性 から,それぞれのAEの特徴や利点・欠点を明らかにした.最終的に,実際の機械設備の状態をより明瞭に可視 化できる異常度算出モデルを構築できることが分かった.
キーワード 異常検知,故障予測,Autoencoder,振動データ,ニューラルネットワーク
1.
ま え が き産業分野,特に製造業において,不良品や異物混入 など突発的に発生するような異常,劣化等に起因する 機械設備の故障といった異常など,様々な「異常」が 不定期に発生する.異常の発生は不良品や事故の発生 にも繋がる重大な要素であるため,異常の発生を防止 あるいは予測するための研究に高い関心が集まって いる.工場設備や機械にセンサを取り付け,得られた データを解析することで,加工異常の検出
[1]
や機器 の異常診断[2]
など,課題解決のための異常検知を行 う手法及びシステムの研究は行われているが,産業分†岐阜大学,岐阜市
Gifu University, 1–1 Yanagido, Gifu-shi, 501–1193 Japan
††KYB株式会社,東京都
KYB Corporation, World Trade Center Bldg. 11F, 2–4–1 Hamamatsu-cho, Minato-ku, Tokyo, 105–6111 Japan
a) E-mail: [email protected]
*本論文は,学生論文特集秀逸論文である.
DOI:10.14923/transinfj.2020PDP0042
野における異常検知の主流はルールベース,若しくは 単純な機械学習ベースに基づくモデルの研究・システ ムが多い.一方で,産業分野においても深層学習を用 いた異常検知を行う研究が増加傾向にある
[3]
.この 一因として,専門家の知識や経験を基に行う特徴抽出 のプロセスを自動化できる点が挙げられる[4]
.これ により,データ入力から分類・予測結果の出力まで一 連のプロセスを深層学習により行うend-to-end
なシス テムの構築が可能である.本研究では,製造業の抱える課題の一つである,工 場内における機械及び工場設備の機械設備の劣化によ り発生する「故障」の事前予測を,定期的に取得した 振動データに対して深層学習技術を用いて行うことを 目的として取り組んできた
[5], [6]
.本研究における異 常予測,若しくは故障予測モデルは,定期的に取得す る振動データから,正常時からどれだけ離れているか を示す指標(
以下,異常度(Abnormality)
と記す)
を算 出する.異常度は,その数値が高ければ高いほど異常 に近い状態であるとする指標である[7]
.異常度が一電子情報通信学会論文誌 ©一般社団法人電子情報通信学会
定期間高い数値を示した場合に,まもなく故障するこ とを示すアラートを出す,という故障予測アルゴリズ ムの提案が最終的な目的となる.
本論文では,深層学習の一手法である
Autoencoder (AE) [8]
を 故 障 予 測 に 用 い る .具 体 的 に は ,順 伝 播型Autoencoder (Feed-Forward Nerural Network AE;
FFNN-AE)
,及びAE
のノードを置換した構造であるLong Short-Term Memory Autoencoder (LSTM-AE)
,及 びTemporal Convolutional Network Autoencoder (TCN- AE)
の3
種類のAE
を用いる.これらのモデルそれぞ れにおいて,異常度算出にどのような特徴が現れるか を調査し,振動データの生波形を入力としたend-to-end
異常度算出手法による故障予測の有効性を考察する.本論文では,はじめに
Autoencoder
において,最も安 定性を保証できるパラメータを調査するため,TCN-AE
を用いて層数やパラメータ等を変化させ,その精度及 び学習速度について考察する.続いて,3
種類のAE
を用いて異常度算出を行い,構造による異常度の推移 に対する特徴や,算出速度とパラメータ数などの特性 の違いを,各モデルのもつ一般的な特徴と照らし合わ せて比較し,本異常度算出手法に対しどのような影響 や特性が現れるかを調査する.なお,本論文における「安定性」とは,異常度の突発的な変化の発生をどれだ け抑えられるか,を指すものである.
2.
使用するデータについて本研究において故障予測を行う工場設備は,自動車 部品工場にて製品の搬送に用いられるオーバーヘッ ドトロリーコンベアである.このコンベアを駆動する モータ
(
図1)
に3
軸加速度センサを設置し,10
分お きに10
秒間の振動データを自動的に取得した.図2
に示している今回設置した加速度センサは,図1
の左図1 チェーンコンベアのモータ Fig. 1 A Motor driver of chain conveyor.
下にあるギア部の右手前部に設置した.チェーンコン ベアの挙動に影響が無く,かつモータ振動以外の雑振 動の影響を受けにくい場所に設置している.取得した データのうち,実際に工場が稼働していた
7
か月分の 振動データを,後述する故障予測手法の学習及び検証 実験に用いている.この7
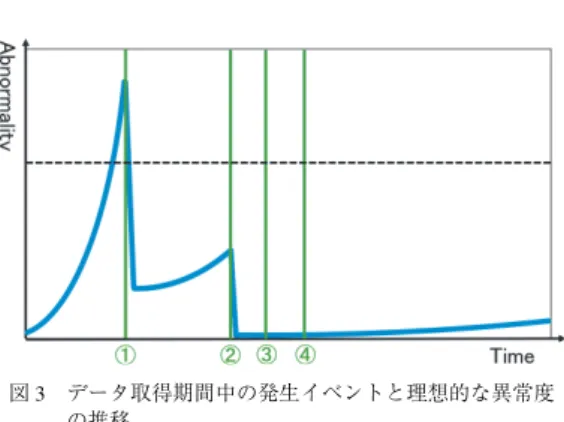
か月の期間中のイベントを 図3
のグラフのうち,4
本の縦線で示している.この 期間中,一度チェーンの噛合い不良に起因する異音が 発生し,コンベアを停止したという事象が発生してい る( ⃝)
1 .本論文では,これ以降この事象を「故障」とし て扱う.故障発生後から,新しいチェーンと交換する までの5
週間後( ⃝)
2 までの期間は,劣化したチェーン を調整し,使用している.チェーンを新しいものに交 換し,その2
週間後に初期メンテナンスに伴うチェー ンの初期伸びカットを行っている( ⃝)
3 .また,図3
に は,この期間中における理想的な異常度の推移を曲線 で示している.図中の破線をしきい値としたとき,異 常度がこのしきい値を故障が発生する前に設計するこ図2 モータ部に設置した加速度センサ.センサは図1中 のモータの左下,ギアの右側に位置している.
Fig. 2 A acceleration sensor installed on the motor drive, located on the right side of the gear at the lower left of the motor driver in Fig. 1.
図3 データ取得期間中の発生イベントと理想的な異常度 の推移
Fig. 3 Events during the data acquisition period and the ideal abnormality score.
表1 チェーンコンベアの振動データの取得条件 Table 1 Settings of vibration data aquired from chain conveyor.
条件 設定値
1ファイル中のデータ長 10秒 チェーンコンベアによる製品の搬送間隔 約0.67秒
ファイル数 7452件 学習用データのファイル数 500件 サンプリング周波数 12.8 kHz ダウンサンプリング後のサンプリング周波数 1280 Hz
とで,故障予測を行うことが期待できる.ただし,
( ⃝)
1 から( ⃝)
2 の期間中は,チェーンを交換せず劣化状態 のチェーンを使用しているため,故障直前よりは低い ものの正常状態よりも高い異常度を保持すると考えら れる.表
1
にチェーンコンベアにおける振動データの取得 条件を示す.本論文では,本データのうちチェーンの 初期伸びカット後から2
週間分の区間(
図中⃝–
3⃝
4 の 区間,500
ファイル)
をモデル学習に用いる正常デー タ区間として扱う.また,本研究では,3
軸加速度セ ンサより得られた3
方向データのうち,もっともコン ベアの挙動と振動の傾向が近い鉛直1
方向のデータの みを用いている.また,入力データのパラメータ削減 のため,サンプリング周波数を10
分の1
にダウンサ ンプリングしている.このファイルからAE
への入力 としてデータを用いる場合には,入力データ長に対応 するサンプリング点数分のデータを,1
点ずつずらし て順番に抽出していく.例えばデータ長を800ms
とし た場合,サンプリング周波数が1280Hz
となるのでサ ンプリング点数は1024
点となる.この1024
点を,各 ファイルから順に抽出していく.すなわち,1
番目の データは1
点目から1024
点目まで,2
番目のデータ は2
点目から1025
点目まで,3
番目のデータは3
点 目から1026
点目まで,といったようにデータを抽出 する.この処理により,より多くのデータをファイル から取り出すことが可能であり,大きなモデルの学習 にも十分対応できるデータ数を確保できる.3. Autoencoder
とTCN
本章では,
Autoencoder (AE, FFNN-AE)
の構造と,その応用系構造である
LSTM-AE
及びTCN-AE
につ いて説明する.周波数領域の情報を入力として振動か ら異常検知を行う研究には,[5]
や[6]
などがあるが,本研究では時間領域の情報を入力としたモデルについ て検討を行う.また,
TCN-AE
モデルについて,その図4 Autoencoder (AE)の構成例 Fig. 4 Example of architecture of Autoencoder (AE).
モデルを構成する
TCN
についても説明する.3. 1 Feed-Forward Neural Network Autoencoder;
FFNN-AE
Autoencoder; AE (
本論文では他手法との区別のた め,FFNN-AE
と呼称する)
とは,ニューラルネット構 造を用いたアルゴリズムの一つであり,次元圧縮や,再構成誤差に基づく異常検知等に用いられる.図
4
にAE
の構成例を示す.AE
は中心となる中間層を基準 に対称な層数及び次元数によるノードで構成されるencoder-decoder
構造である.Autoencoder
は,入力層 と出力層に同じデータを用いて教師あり学習を行うこ とで,推論時には入力されたデータを再構成して出力 する.異常検知の分野において
AE
構造を活用する場合に は,正常サンプルのみにより構成されたデータセット を用いてAE
を学習することで,正常状態とは挙動が 異なる,故障に近いデータを入力した場合にAE
がう まく再構成できず,再構成誤差が高くなる性質を利用 する[4]
.この再構成誤差を異常度として扱うことで,入力されたデータに基づき異常検知を行う.
3. 2 Long Short-Term Memory AE; LSTM-AE Long Short-Term Memory
とは,時刻間の関係性を学 習する構造をもつ再帰型ニューラルネット(Reccurent Neural Network; RNN)
の一種である.LSTM
ブロック と呼ばれるゲート構造をもつ再帰型ノードを用いるこ とで,音声や文字列,センサデータのような系列デー タがもつ時間的情報のうち,必要な情報だけを保持し て学習できる[9]
〜[11]
.LSTM-AE
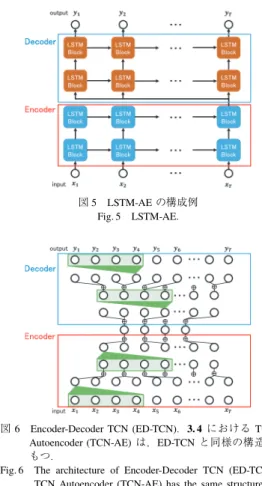
は,図5
で示すよ うなencoder
部・decoder
部をLSTM
ブロックにより 置換した構造をもつAE
である.LSTM-AE
のモデル 構造例を図5
に示す.3. 3 Temporal Convolutional Network; TCN
Temporal Convolutional Network
は,音声やセンサ図5 LSTM-AEの構成例 Fig. 5 LSTM-AE.
図6 Encoder-Decoder TCN (ED-TCN).3. 4におけるTCN Autoencoder (TCN-AE)は,ED-TCNと同様の構造を もつ.
Fig. 6 The architecture of Encoder-Decoder TCN (ED-TCN).
TCN Autoencoder (TCN-AE) has the same structure as ED-TCN.
データなどの系列データに対し,時間方向に
1
次元畳 み込みを繰り返すことで学習するニューラルネット構 造である.1
次元の畳み込みをモデルに組み込む方法 には,回帰タスクなどに適合した入力と出力が異なる 構造とする方法もあるが,本研究ではEncoder-Decoder TCN (ED-TCN) [12]
の構造をベースとしたモデルを 構築しているため,本構造について説明する.図6
にED-TCN
の構造を示す.ED-TCN
は,encoder
部とdecoder
部の層数・次元数が線対称となるように設計された,畳み込み層,プーリング層及びアップサンプ リング層により構成される
encoder-decoder
モデルで ある.ただし,図6
中のx
k において,k
は畳み込み の長さ(
カーネルサイズ)
を示し,後述する実験を含 め,本研究においてはサンプリング周波数との関係 からk = 128
としている.encoder
の各層では,1
次 元畳み込みとプーリングを行う.l
番目のencoder
層E
(l), l ∈ {1, 2, . . . , L}
は,一つ前の層E
(l−1),畳み込み フィルタW = {W
(i)}
Fi=1l(F
lはl
層目における畳み込みフィルタ数
)
,バイアス項b
及び活性化関数f
を用 いて,式(1)
のように表せる.E
(l)= f (W ∗ E
(l−1)+ b) (1)
ここで,本構造における畳み込み層の活性化関数には,
式
(2)
で示すような正規化ReLU (normalized ReLU)
を 用いている.ただし,式中のϵ
は定数である.f (x) = ReLU(x)
max ( ReLU ( x )) + ϵ (2)
畳 み 込 み 処 理 後 ,最 大 プ ー リ ン グ を 行 う こ と で , デ ー タ 長
T
(l) は 一 つ 前 のencoder
層 の 12 と な る
(T E
(l)=
12T E
(l−1))
.この処理により,時間窓の長い 系列データを効果的に学習することができる.decoder
における各層の構成はencoder
層と構造的に同様であ るが,encoder
層では各層における畳み込み後にプー リングを行うのに対し,decoder
層では畳み込み後に,l
番目のdecoder
層D
(l), l ∈ { L , . . . , 2 , 1 }
におけるデー タ長が一つ前の層D
(l+1)の2
倍(T D
(l)= 2T D
(l+1))
と なるようにアップサンプリングを行う.3. 4 TCN-Autoencoder (TCN-AE)
本論文において異常検知に利用する構造である
TCN- AE
は,構造自体は先述したED-TCN
と同様である.しかし,
[12]
において定義されるED-TCN
は,用いら れているタスクが識別タスクであるため,時刻t
にお ける出力Y ˆ
t は,decoder
の最終層D
(1)に対しsoftmax
関数を掛け合わせている.一方本研究では,ED-TCN
の構造をAutoencoder
として使用する.すなわち入力 データと出力データに同一の系列データを使用するた め,出力層Y
において用いる関数を線形関数に変更し ている.出力層は以下の式(3)
により算出される.た だし,U
はD
(1)における重みベクトル,c
はバイアス 項である.Y ˆ
t= linear(U ∗ D
(1)t+ c) (3)
4.
異常度算出手法本章では,
2.
にて説明したデータを用いて,3
種類のAE
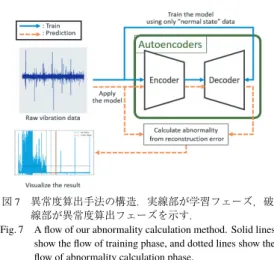
構造による異常度算出を行う手法について説明す る.本手法の流れを図7
に示す.図中のAutoencoder
部に,3.
で紹介した3
種類のAutoencoder
構造を用い ることにより,異常度算出を行うことができる.本手 法では,AE
への入力データと出力結果との再構成誤 差から異常度算出を行う.実線の矢印で示した流れ図7 異常度算出手法の構造.実線部が学習フェーズ,破 線部が異常度算出フェーズを示す.
Fig. 7 A flow of our abnormality calculation method. Solid lines show the flow of training phase, and dotted lines show the flow of abnormality calculation phase.
がモデルの学習を行う段階
(
学習フェーズ)
,破線の矢 印で示した流れが異常度算出を行う段階(
異常度算出 フェーズ)
である.学習フェーズにおいては,正常状 態におけるデータ群のみからデータを選出して学習用 データとして用いる.このことにより,モデルが正常 状態におけるデータの分布を学習し,正常状態のデー タが入力されれば再構成誤差が小さくなり,故障に近 い状態のデータが入力されれば再構成誤差が大きくな る.異常度算出フェーズでは,はじめに学習済みモデ ルにデータを入力し,再構成誤差を算出する.データ 長がT
である入力データをX = {x
1, x
2, . . . , x
T}
,出力結果を
Y = {y
1, y
2, . . . , y
T}
としたとき,再構成誤差a(Y ; X)
は次の式(4)
で計算される.a( Y ; X ) =
∑
T t=1(y
t− x
t)
2(4)
算出した再構成誤差
a(Y ; X)
は,そのまま対象データ に対する異常度として扱う.算出した異常度に基づいて故障予測を行う場合,以 下のような手順によって行う.はじめに,一定期間の 幅における異常度の移動平均を算出し,データ間での 異常度の推移を平滑化する.つづいて,集計した時刻 順に異常度の推移に基づき,正常・異常判定を行うた めのしきい値を設定する.最後に,異常度の移動平均 の推移がしきい値を超えた場合に,故障が予測される ことをアラートするようにシステムを設計する.
5.
実験1 Autoencoder
におけるパラメー タ調査本異常度算出手法において
AE
の構造を決定するパ表2 実験1におけるAEの設定条件 Table 2 Settings of Autoencoders for experiment No.1.
条件 設定値
入力データ長 100/200/400/800 (ms) encoder/decoderの (8)/(16)/(32)/(8,8)/
積層数・フィルタ数 (8,16)/(8,8,8)/(8,8,8,8) TCN部における活性化関数 Normalized ReLU AEの出力における活性化関数 Linear
誤差関数 Mean Squared Error
最適化アルゴリズム Stohastic Gradient Decent
学習率 0.01
移動平均を行うデータ幅 3000
表3 実験に用いた機材及びフレームワーク Table 3 Experimental setup.
条件 設定値
使用OS Ubuntu 18.04.4 LTS
計算処理GPU GeForce GTX 1070 Ti
使用フレームワーク Keras [13] (TensorFlow [14] backend)
ラメータのうち,入力データ長はモデルがどれだけの 期間のデータを学習の際に加味するかを表すモデルの 受容野の幅となる.また積層数やフィルタ数は,入力 データのもつ変動パターンに対して,どれだけ学習す るかに相当するモデルの表現力に関わる.本実験では,
この
2
種類のパラメータを変化させ,TCN-AE
により 異常度を算出し,異常度の推移やその安定性,及びパ ラメータ数や学習,推論速度から,最適なパラメータ について考察する.5. 1
実 験 条 件変化させるパラメータの条件について,以下の表
2
に示す.ただし,変化させないパラメータについて は,[12]
と同等のパラメータを使用する.また,en- coder/decoder
の積層数・フィルタ数の組み合わせは,対応する順に括弧内に表記している.例えば,
encoder
層が2
層で構成され,フィルタ数が1
層目は8
,2
層 目は16
となる場合,F = ( 8 , 16 )
のように表記してい る.異常度算出結果のグラフについて,データごとに 算出した異常度に対し移動平均を取ったものである.また,グラフ中に水平方向に引かれた点線は,異常度 の移動平均値全体の
95%
の地点を示している.また,本実験において学習及び異常度算出に用いた機材及び フレームワークを表
3
に示す.5. 2
結果・考察設定パラメータ条件における異常度算出結果のう ち,積層数
1
,フィルタ数(8)
,入力データ長100 ms
の場合を図8
に,入力データ長800 ms
の場合を図9
に,フィルタ数(16)
,入力データ長800 ms
の場合を表4 積層数・フィルタ数ごとのパラメータ数
Table 4 The number of model parameters and abnormality calculation speed per data of each models/
nodes.
積層数・フィルタ数 (8) (16) (32) (8,8) (8,16) (8,8,8) (8,8,8,8) パラメータ数 9,241 34,865 135,265 25,641 66,617 42,041 58,441 異常度算出速度/データ(µs) 6.593 6.784 8.439 8.340 8.664 9.451 10.733
図8 入力データ長100 ms,積層数1,フィルタ数(8)に おける異常度の推移
Fig. 8 Abnormality results with the parameters of input data= 100 ms, layer=1, filter=(8).
図9 入力データ長800 ms,積層数1,フィルタ数(8)に おける異常度の推移
Fig. 9 Abnormality results with the parameters of input data= 800 ms, 1 layer, filter=(8).
図
10
に,積層数4
,フィルタ数(8, 8, 8, 8)
,入力データ 長800 ms
の場合を図11
に示す.また,表4
に各パラ メータにおける1
データあたりの異常度算出速度及び パラメータ数を示す.この結果について,本節では積層数・フィルタ数の 観点から考察を行う.図
9
,図10
,図11
に示すとお り,異常度の算出結果に対して,積層数・フィルタ数に よる有意な差は見られず,おおむね同様の値となった.一方,表
4
より,パラメータ数や計算時間のより少な図10 入力データ長800 ms,積層数1,フィルタ数(16)に おける異常度の推移
Fig. 10 Abnormality results with the parameters of input data= 800 ms, 1 layer, filter=(16).
図11 入力データ長800 ms,積層数4,フィルタ数(8,8,8,8) における異常度の推移
Fig. 11 Abnormality results with the parameters of input data= 800 ms, 4 layers, filter=(8,8,8,8).
いパラメータの組み合わせは,積層数
1
,フィルタ数(8)
の場合と積層数2
,(8, 8)
の2
種類であり,後述する 実験ではこれらのパラメータを使用することとした.5. 3
入力データ長に関するパラメータの調査 前節の図8
と図9
を見ても明らかなように,入力 データ長が長ければ長いほど故障前後における異常度 の差が大きくなり,またチェーン交換後の期間におい て発生する突発的な異常度の上昇も抑えられる傾向が みられた.これは,モデルに入力する情報が増えるほ表6 入力データ長ごとの異常度算出速度 Table 6 Abnormality calculation speed per data of each input length.
積層数・フィルタ数 (8) (8,8)
入力データ長(ms) 400 800 1200 1600 400 800 1200 1600 異常度算出速度/データ(µs) 4.902 6.784 7.843 10.407 6.326 8.340 10.111 11.786
表5 AEの設定条件 Table 5 Settings of AE.
条件 設定値
入力データ長 400/800/1200/1600 (ms) encoder/decoderの
(8)/(8,8) 積層数・フィルタ数
どモデルはより正確に正常状態における分布を学習で き,突発的に起こる異常も吸収できることが考えられ る.そこで,入力データ長を更に延長した場合におけ る異常度の推移や学習速度について比較を行った.実 験条件を表
5
に示す.ただし,入力データ長及び積層 数・フィルタ数以外の条件は表5
と同様である.異常 度算出を行った結果,異常度の推移については,入力 データ長が800 ms
より長くなった場合,800 ms
にお ける推移とほぼ同じであることが分かった.今回用い たチェーンコンベアによる製品の搬送間隔が670 ms
程 度であることから,入力データ長が800 ms
以上の場合 に,異常度の算出に十分な情報をモデルが獲得できた と考えられる.なお,この搬送間隔については,デー タ解析を行うことで発見したパラメータであり,機械 に関する事前知識が無くても獲得できる知見である.一方で,表
6
のとおり,入力データ長を延長するにつ れて学習及び異常度算出に要する時間は長くなった.これらの結果及び考察を踏まえて,後述する実験にお いては,入力データ長は
800 ms
とすることとした.6.
実験2
異常度算出手法間における特性の 調査と精度比較本章では,
5.
における実験において求められた2
種 類のパラメータを用いて,3
種類のAE
により異常度 算出を行い,構造による異常度の推移に対する特徴や,算出速度とパラメータ数などの特性の違いを調査する 実験とその結果を説明する.
6. 1
実 験 条 件本実験における
3
種類のAE
の設定パラメータは,表
2
と同様のものである.ただし,先述のとおりモデ ルの入力データ長には800 ms
を,TCN-AE
の積層数・フィルタ数,及び
LSTM-AE
の積層数・LSTM
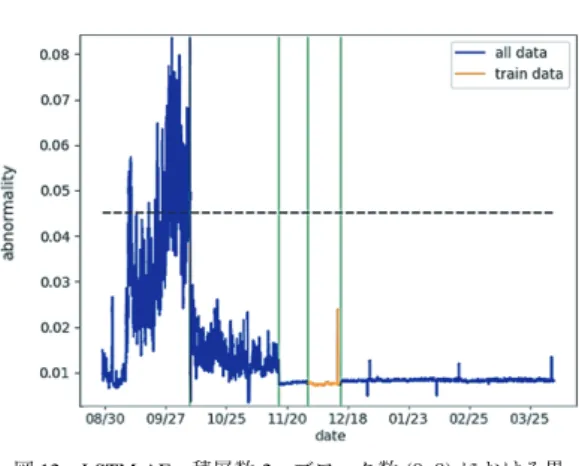
ブロッ図12 LSTM-AE,積層数2,ブロック数(8,8)における異
常度の推移
Fig. 12 Abnormality results of LSTM-AE, with the parameters of layer=2, nodes=(8,8).
ク数には積層数
1
,ブロック数(8)
と積層数2
,ブロッ ク数(8, 8)
の2
種類のパラメータを使用した.また,FFNN-AE
の積層数・ノード数については,いずれも積層数
2
で,ノード数は( 512 , 128 )
と( 256 , 128 )
の2
種類パラメータを使用した.また,データの入力方法 については,FFNN-AE
の場合は始端から終端までの 全ての時刻分のデータを同時に入力し,LSTM-AE
とTCN-AE
の場合は各時刻につき1
点ずつ入力する.加 えて,各モデルの性能評価のため,異常度算出時の速 度を比較した.6. 2
結果・考察異常度算出結果のうち,
LSTM-AE
における積層数 が2
,ブロック数が( 8 , 8 )
である場合の結果を図12
に,FFNN-AE
における積層数が2
,ノード数が( 256 , 128 )
の場合の結果を図13
に示す.また,表7
に,故障前2
週間から故障(
図3
中⃝)
1 まで(
区間1)
,故障後から チェーン交換( ⃝)
2 まで(
区間2)
,モデルの学習に用い た区間(
区間3
,⃝–
3⃝)
4 ,学習に用いた区間以降の区間(
区間4
,⃝
4 以降)
の4
区間における異常度の平均を示 す.最後に,各モデル,及び各モデルにおける積層数・ノード数・ブロック数・フィルタ数における
1
データ あたりの異常度算出速度,及びパラメータ数を表8
に 示す.モデルにより算出された異常度の推移について,大
表8 モデルごと,及び積層数・ノード数・ブロック数・フィルタ数ごとのパラメータ数及び 1データあたりの異常度算出速度
Table 8 The number of model parameters and abnormality calculation speed per data of each models/nodes/blocks/filters.
モデル FFNN-AE LSTM-AE TCN-AE
積層数・ノード数・ブロック数・フィルタ数 (512,256) (256,128) (8) (8,8) (8) (8,8) パラメータ数 1,050,112 985,088 1,737 3,913 9,241 25,641 異常度算出速度/データ(µs) 3.129 3.050 272.207 543.781 6.593 8.340
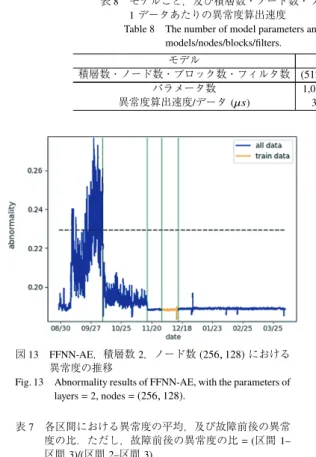
図13 FFNN-AE,積層数2,ノード数(256,128)における
異常度の推移
Fig. 13 Abnormality results of FFNN-AE, with the parameters of layers=2, nodes=(256,128).
表7 各区間における異常度の平均,及び故障前後の異常 度の比.ただし,故障前後の異常度の比=(区間1–
区間3)/(区間2–区間3)
Table 7 Mean of abnormality in each period and the abnormality ratio of brfore the failure to after the failure.
モデル 区間1 区間2 区間3 区間4 異常度比 FFNN-AE 0.7789 0.7147 0.7055 0.7057 7.954 LSTM-AE 0.0313 0.0137 0.0077 0.0082 3.915 TCN-AE 0.0351 0.0133 0.0067 0.0073 4.278
きな挙動の差は見られなかった.ただし,表
7
より,故 障前後の異常度の比は,FFNN-AE
の場合が7.954
なの に対し,TCN-AE
が4.278
,LSTM-AE
は3.915
となり,故障後の異常度の下降の割合に差が生じた.
LSTM-AE
のもつゲート構造や,TCN-AE
のもつ時間的畳み込み 構造により,突発的な値変化への感度がFFNN-AE
よ りも高いことが要因であると考えられる.このことか ら,LSTM-AE
及びTCN-AE
により非定常な突発的異 常を捉えることで,劣化の進行と外れ値の出現を同時 に検出することが期待できる.続いて,パラメータ数及び異常度算出速度の推移の 観点から考察を行う.表
8
のとおり,パラメータ数はLSTM-AE
が最小,FFNN-AE
が最大となった.異常 度算出時の速度は,LSTM-AE
が最大,FFNN-AE
が 最小となり,パラメータ数が5.320
倍多いTCN-AE
構造と比較しても
41.28
倍の時間を要した.パラメータ がFFNN-AE
において増大する理由は,LSTM-AE
やTCN-AE
の場合,入力データのもつ時刻情報に基づいて順番に入力されていくのに対し,
FFNN-AE
の場合 にはデータ長分の全てのデータを同時に入力する必 要があることが考えられる.一方で,データを系列情 報として扱うLSTM-AE
が,TCN-AE
よりも異常度算 出に要する時間が増大する理由は,TCN-AE
が複数 の時刻分で一度に畳み込みを行う構造をもつのに対し,
LSTM-AE
は時刻順に系列データを再帰する構造を取っていることが考えられる.
以上の考察に加え,
LSTM-AE
及びTCN-AE
は系 列データのみに使用できるのに対し,FFNN-AE
は時 系列以外のデータにも使用できることも踏まえると,FFNN-AE
は,学習データが十分に確保できる場合には高い異常度算出性能を発揮することが期待でき,デー タの形態に対しても柔軟に対応した異常度算出器とな ることが期待できる.一方で,モニタリング初期段階 や,新品から劣化までのサイクルが短い設備など,獲 得できるデータのサンプル数が限定される場合には,
FFNN-AE
の学習に必要なデータが確保できない,ということが考えられる.そういった場合には,よりパ ラメータの少ない
TCN-AE
及びLSTM-AE
が有効で あると考えられる.特に,TCN-AE
については,少な いパラメータでありながら,FFNN-AE
のような大き な表現力を有するモデルと同様の異常度の推移を出力 できている.FFNN
,及びLSTM
をはじめとしたRNN
構造にお いて,モデルの性能はパラメータのチューニングに よって大きく左右されるのに対し,TCN
は比較的単純 なチューニングで高い性能を発揮できる[15]
ことも考 慮すると,TCN-AE
はデータサンプルが限られる場合 や,メモリや時間に制約があり大きなサイズのモデル を使用できない状況下においては,TCN-AE
が最も性 能の高い異常度算出器となることが期待できる.以上の結果及び考察を,表
9
にまとめる.本表は,振動データをはじめとした,観測データに基づく故障
表9 3種類のAEベース異常度算出手法の比較
Table 9 Comparison of three types of AE-based abnormality calculation method.
モデル 利点 欠点
FFNN-AE
•振動・音声・画像データなど,様々なデー タ形式に対応しているため,汎用性が高い
•十分なデータが揃っている場合,高い異 常度算出性能を発揮する
•モデルのパラメータ数が増大する
•複雑な特徴表現の獲得のため積層数・ノード 数を増加する必要がある
LSTM-AE
•再帰構造をもつため,積層数・ノード数を 増加してもパラメータ数が少なく,小さい モデルの構築が可能
•入力データ長が長い場合,再帰構造により 学習及び異常度算出に要する時間が大幅に 増大する
•最適な構造の発見のためのチューニングに 時間を要する
TCN-AE
•データが少ない場合でも,単純なチューニ ングのみで高い異常度算出性能を発揮する
•畳み込み構造をもつため,入力データ長に よる異常度算出時間への影響が少ない
•積層数及びノード数を増加させた場合,
モデルのパラメータ数が急激に増大する
予測を実施する場合に,どのようなモデル・入力情報 を用いることでより有効な異常度算出が可能となるか を示すものといえる.
7.
む す び本論文では,
AE
とその応用構造を用いた,振動 データからの工場設備の故障の事前予測のためのend-
to-end
による異常度算出手法を構築した.本手法は,FFNN-AE
,LSTM-AE
,TCN-AE
の3
種類の構造を用 い,再構成誤差により異常検知を行うものである.本論文では,
TCN-AE
における積層構造及び入力 データ長に対するパラメータに対する考察のための比 較実験と,3
種類の手法間の異常度算出における特性 を調査し,比較するための実験を実施した.パラメー タの比較の結果,TCN-AE
におけるパラメータについ て,振動周期など振動データの特性を事前に解析し,その特性を加味した入力データ長を選択することで効 果的な異常度算出が可能であることを示した.また,
3
種類のAE
により異常度算出を行い,その構造の違 いや異常度の推移における特性の違いについて調査す る実験の結果,ネットワーク構造のもつ特性に加え,入力データの特性を加味したモデル及びパラメータの 選択を行うことで,実際の機械設備の状態をより明瞭 に可視化できる異常度算出モデルを構築できることが 分かった.
今後の課題として,
3
点挙げられる.はじめに,更 なるデータ収集を実施した上での故障予測手法の検証 が挙げられる.本論文で使用した振動データは,その収集期間の関係上,学習データより過去の期間の故障 をテストしているため,本論文中における結論にはあ る程度制約がある.このため,更なるデータを収集し,
検証を行う必要がある.続いて,実際の現場において 使用するためのしきい値の設定手法の考案も,今後の 課題である.本論文における実験では,異常度の移動 平均値全体の
95%
の地点をしきい値として使用した が,このしきい値設定手法は現場に適用することは難 しい.このため,正常範囲のみからしきい値を設定で きるような手法を考案する必要がある.最後に,複数 のAutoencoder
によるアンサンブル異常度予測手法,及び故障予測手法の構築が挙げられる.本論文では各
AE
構造を個別に用いて異常度を算出し,その特徴や特 性について考察を行ったが,各モデルとも特性や利点 をもっており,この3
種類の特性を組み合わせ,アン サンブル的にデータのもつ分布を学習することで,更 に安定性の高い異常度算出を行うことが期待できる.文 献
[1] 西田 勇,立川宗治,佐藤隆太,白瀬敬一,“切削トルクの予 測結果と実測結果の定量比較による加工異常検出システム
(第1報 工具摩耗による加工異常検出),”日本機械学会論文 集,vol.84, no.857, Jan. 2018. DOI:10.1299/transjsme.17-00433 [2] 近藤 稔,“振動のオクターブバンド分析を用いた異常検 知法による車両機器の診断,”日本機械学会論文集,vol.84, no.862, June 2018. DOI:10.1299/transjsme.17-00594
[3] 中塚俊介,相澤宏旭,加藤邦人,“少数不良品サンプル下に おけるAdversarial AutoEncoderによる正常モデルの生成と 異常検出,”精密工学会誌,vol.84, no.12, pp.1071–1078, Dec.
2018.
[4] R. Chalapathy and S. Chawla, “Deep learning for anomaly detec- tion: A survey,” arXiv preprint arXiv:1901.03407, Jan. 2019.
[5] A. Matsui, S. Asahi, S. Tamura, S. Hayamizu, R. Isashi, A.
Furukawa, and T. Naito, “Anomaly detection in mechanical vi- bration using combination of signal processing and autoencoder,”
Proc. RISP International Workshop on Nonlinear Circuits, Com- munications and Signal Processing 2020, pp.139–142, Hawaii, USA, March 2020.
[6] S. Asahi, A. Matsui, S. Tamura, S. Hayamizu, R. Isashi, A.
Furukawa, and T. Naito, “Failure Prediction Method for Mechani- cal Equipment from Vibration Data With LSTMAutoencoder and GMM,” Proc. RISP International Workshop on Nonlinear Cir- cuits, Communications and Signal Processing 2020, pp.139–142, Hawaii, USA, March 2020.
[7] 井手 剛,杉山 将,異常検知と変化検知,講談社,東京,
2015.
[8] P. Baldi, “Autoencoders, unsupervised learning, and deep archi- tectures,” Proc. the International Conference on Machine Learning (ICML), pp.37–49, Edinburgh, Scotland, June 2012.
[9] N. Srivastava, E. Mansimov, and R. Salakhudinov, “Unsupervised learning of video representations using lstms,” International con- ference on machine learning (ICML), pp.843–852, Lille, France, July 2015.
[10] F.A. Gers, J. Schmidhuber, and F. Cummins, “Learning to forget:
Continual prediction with LSTM,” Neural computation, vol.12, no.10, pp.2451–2471, Oct. 2000.
[11] S. Hochreiter and J. Schmidhuber, “Long short-term memory,”
Neural computation, vol.9, no.8, pp.1735–1780, Aug. 1997.
[12] C. Lea, M.D. Flynn, R. Vidal, A. Reiter, and G.D. Hager, “Tem- poral convolutional networks for action segmentation and detec- tion,” Proc. IEEE Conf. Computer Vision and Pattern Recognition (CVPR) 2017, pp.156–165, Hawaii, USA, July 2017.
[13] F. Chollet, “Keras Documentation,” https://keras.io/,参照May 28, 2020.
[14] M. Abadi, P. Barham, J. Chen, Z. Chen, A. Davis, J. Dean, M. Devin, S. Ghemawat, G. Irving, M. Isard, M. Kudlur, J.
Levenberg, R. Monga, S. Moore, D.G. Murray, B Steiner, P.
Tucker, V. Vasudevan, P. Warden, M. Wicke, Y. Yu, and X. Zheng,
“TensorFlow: A System for Large-Scale Machine Learning,” Proc.
the 12th USENIX conference on Operating Systems Design and Implementation (OSDI), pp.265–283, Savannah, USA, Nov. 2016.
[15] S. Bai, J.Z. Kolter, and V. Koltun, “An empirical evaluation of generic convolutional and recurrent networks for sequence model- ing,” arXiv preprint arXiv:1803.01271, April 2018.
(2020年6月5日受付,9月25日再受付,
12月18日早期公開)
朝日 翔太
2016年岐阜大学工学部卒,2018年同大 大学院工学研究科修士課程了.現在岐阜大 学大学院博士後期課程所属,波形解析と機 械学習,機械及び設備の異常検知の研究に 従事.
松井 彩華
2019年岐阜大学工学部卒.同大大学院修 士課程在学中.現在,機械学習,異常検知 の研究に従事.
田村 哲嗣 (正員)
2002年東京工業大学大学院情報理工学研 究科計算工学専攻博士課程了.2005年岐阜 大学工学部助手,2007年同助教,2017年 同准教授.この間,2013年フランス国立情 報機械研究所客員研究員,2015年豊田工業 大学シカゴ校客員研究員.博士(工学).音 声情報処理,音声と画像によるマルチモーダル情報処理などの 研究に従事.電子情報通信学会,情報処理学会,日本音響学会,
人工知能学会,日本医療情報学会,IEEE,ISCA各会員.
速水 悟
1981年東京大学大学院工学系研究科修士 課程了.同年,通商産業省工業技術院電子 技術総合研究所.1989年米国カーネギーメ ロン大学客員研究員.1994年フランス国立 科学研究院機械情報学研究所客員研究員.
2001年産業技術総合研究所.2002年より,
岐阜大学工学部教授,現在に至る.博士(工学).
井指 諒亮
2017年静岡大学大学院総合科学技術研 究科工学専攻機械工学コース修士課程了.
2017年KYB株式会社入社.現在,同社技 術本部DX推進部に所属.AI×IoTを活用 したシステム開発に従事.
古川 輝
2005年弓削商船高等専門学校卒.2005 年KYB株式会社入社.現在,同社技術本 部DX推進部に所属.AI×IoTを活用した システム開発に従事.
内藤 孝昌
2007年豊橋技術科学大学大学院工学研究 科機械システム工学専攻了.2007年KYB 株式会社入社.現在,同社技術本部DX推 進部に所属.AI×IoTを活用したシステム 開発に従事.