前章では,線材表層部の引張り強さが中心部と比べて高く,細線材全体の引張り強さ向上に大きな 影響を与えていることを示した.本章では,このことを結晶学的に考察し,引張り強さ向上の要因を 検討することが目的である.結晶学的な観点では,塑性加工による結晶回転の解析1) - 3)や,結晶粒径 と引張り強さなどの関係の究明 4)などが挙げられるが,本章では,主に結晶回転の解析を対象とし, 回転による内部組織変化を検討する.内部組織変化と引張り強さの関係については次章で言及する. そこで,連続伸線における集合組織に着目した. 結晶格子にはそれぞれ特定のすべり面,すべり方向がある.塑性変形はミクロ的な視点で考えれば, この結晶格子のすべり変形であり,塑性加工中はその変形に対応するようにすべり面,すべり方向が 変化する.これは,結晶格子の回転として観察される.連続伸線加工のように同じ変形を繰り返すと, 結晶格子の回転が何度も起こり,最終的には伸線加工に特有のすべり面,すべり方向に収束する.収 束した結果が集合組織である.過去の圧延,伸線,押出しなどの集合組織の研究において,結晶構造, 加工法による安定方位や,それに至るまでの結晶回転が説明されている 3). また,最近の研究では, 集合組織と機械的性質の関係の究明が進められている 5).現段階では,集合組織と機械的性質の相関 を完全に把握できてはいないが,得られた知見は,組織制御による材質改善などの創質に関する技術 への応用が期待されている. 伸線加工中において,中心部では半径方向に圧縮を受けつつ軸方向に伸び変形している.一方で, 表層部では,さらに工具との摩擦によるせん断変形が加わる(第 1 章 Fig. 1.5 参照).このように中心 部と表層部の変形は異なっていると考えられている.そのため,連続伸線によって発生した集合組織 も中心部と表層部で異なると仮定した.この集合組織の相違は,付加的せん断変形の影響であると考 えられる.そこで,集合組織の解析から,せん断ひずみ層における結晶格子の回転を把握することに した.結晶方位測定には EBSD を用いた.EBSD は SEM に付属する装置であり,結晶方位測定におい て近年注目を集めている方法6) である. 本章の構成は,4.2 節において EBSD 測定方法について説明している.続く 4.3 節では実際に得られ た集合組織の極点図を解析した.その結果,中心部では 1 つの結晶方位が存在するのに対して,表層 部では 2 つの結晶方位が存在することが判明し,表層部と中心部の集合組織が異なっていることが証 明できた.4.4 節では中心部の結晶方位の安定性および,表層部の結晶方位が 2 つ存在する原因につい て考察した.最後に 4.5 節で本章を総括している.
4.2 実験方法
4.2.1 供試材 材料は前章と同様に,低炭素鋼線 SWRM6 を用いた.総減面率を同じとして,第 2 章で定義したよ うに線径 D = 0.4 mm 以上の線径である太線材 D = 0.77 mm,およびそれ以下の線径である細線材 D = 0.10 mm の 2 種類の線材を用意した.それぞれの製造工程を Fig. 4.1 に示す. 太線材の作成プロセスは熱間圧延後の D = 5.50 mm を 1073 K,1 h で焼鈍した.つぎに総減面率 Re = 98%で D = 0.77 mm まで連続伸線した.一方,細線材は D = 5.50 mm から D = 1.00 mm まで連続伸線し た後,前述の条件で焼鈍して総減面率 Re = 99%で D = 0.10 mm まで連続伸線した.(a) Bulk wire (0.77 mm wire)
Grooved rolling 1 pass drawing (Re = 16%) Annealing (1073 K, 1hour)
Continual drawing (Re = 98%)
5.50 mm
0.77 mm 6.00 mm
Fig. 4.1 Manufacturing process of bulk and fine wire
(b) Fine wire (0.10 mm wire) Continual drawing (Re = 96%)
Annealing (1073 K, 1hour) Continual drawing (Re = 99%)
5.50 mm 1.00 mm
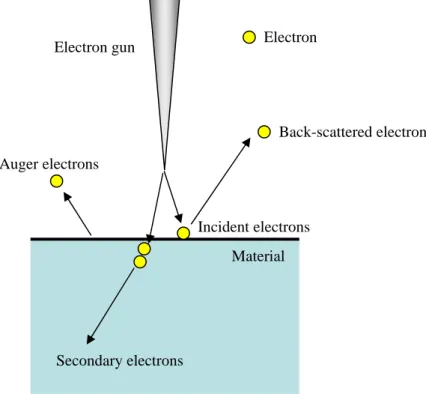
金属材料に電子線を入射させた場合の,入射した電子および,金属材料内の電子の挙動を Fig. 4.2 に示す.入射した電子は金属原子の電子に衝突する.その衝突時に,後方に跳ね返された電子を反射 電子,または後方散乱電子とよぶ.入射電子との衝突によって,原子外にはじき出した電子を 2 次電 子とよぶ.また,2 次電子を放出した空孔に原子内の電子が遷移するさいに放出される電子をオージ ェ電子とよぶ.2 次電子は SEM の立体像形成に利用され,オージェ電子は最表層部の元素分析に利用 される. Electron
EBSD は”Electron Back-Scatter Diffraction” 「後方散乱電子回折」の略であり,後方散乱電子が描く 菊池線という回折パターンを利用している.菊池線の 1 例を Fig. 4.3 に示す. 菊池線は一定幅を保っ た複数の平行線によって形成されている. Back-scattered electron Electron gun Auger electrons Incident electrons Material Secondary electrons
Fig. 4.2 Back-Scattered electron
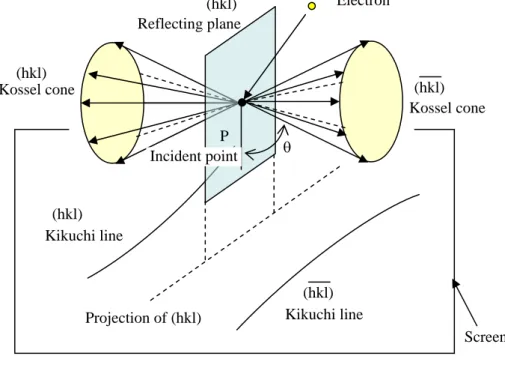
菊池線の発生メカニズムを Fig. 4.4 に示す8).ある平面 (hkl)に入射した電子は結晶格子のある平面 によって反射・散乱される.この反射・散乱した電子は,Fig. 4.4 に示すように,結晶格子面と一定の 角度θを保った円錐を形成する.この円錐は反射平面を挟んで両面に発生する.この 2 つの円錐によ って,平面スクリーンに平行線である菊池線が描かれる.このように,菊池線には反射した結晶格子 面の情報が含まれている. Projection of (hkl) P Electron (hkl) (hkl) Kossel cone Reflecting plane (hkl) Kossel cone (hkl) Kikuchi line (hkl) Kikuchi line θ Screen Incident point
Fig. 4.4 Mechanism of Kikuchi diffraction
Fig. 4.5 Analysis of Kikuchi diffraction
菊池線では,平行線の幅と交点の位置は,結晶構造および結晶方位と 1 対 1 対応している.よって, 結晶構造が判明している場合は,菊池線を解析することによって,結晶方位の情報が得られる.EBSD では,それぞれの結晶構造において,基準となる結晶方位の菊池線をデータベース化してあり,それ らのデータを基にして測定した材料の結晶方位を計算している.菊池線による解析例を Fig. 4.5 に示 す.観察された菊池線から平行線と交点を指数付けし,データベースと照合してこのパターンを生成 する結晶方位を決定する.
範囲が狭くても,菊池線が描くことが可能であり,結晶方位を解析できるためである.EBSD の発達 により,試料中の結晶方位の地理的,空間的分布が把握できるようになった.実際の測定では Fig. 4.6 に示すように,電子線を試料表面に,1 箇所ずつステップ照射し,1 箇所ずつ菊池線を測定して結晶方 位を決定していく方法となる.
Fig. 4.6 Measurement of crystal orientation in EBSD
つぎに,結晶粒の決定方法を説明する.Fig. 4.7 に結晶粒の決定,およびマップ描画の一連の流れを 示す.
Fig. 4.7 Flow chart of drawing crystal grain map
Calculation of misorientation angle θ between 2 pixels
Comparison of θdto X
X > θd X < θd
Provisional crystal grain boundary
Count of same direction pixel
Determination of crystal grain boundary Provisional
crystal grain
Over 5 steps Less than 5 steps
Noise
Provisional crystal grain boundary
Crystal grain boundary
Crystal grain X X: Misorientation angle Crystal orientation θd: Misorientation angle determined as boundary
結晶粒は,結晶方位が同じ結晶格子の集合である.そして,結晶粒界とは,同じ結晶方位で成長し てきた結晶粒が接する境界である.よって,結晶粒界では隣接する結晶粒の間で結晶方位差θが発生 する.EBSD ではこの結晶方位差θの値を指定することによって,結晶粒界を判定して結晶粒を決定す る. Fig. 4.6 に示したように,1 箇所ずつ電子線を照査して結晶方位を測定する段階において,前ス テップで測定した結晶方位との角度差を計算する.この角度差をここでは便宜上 X とする.この X が 粒界と指定した角度差θdよりも小さい場合は前ステップと同じ結晶粒内と判定する.一方,計算した 角度差 X が,設定角度差θdよりも大きい場合は前ステップとは異なる結晶粒と判定し,前ステップと の間を粒界と決定する.以上のような流れで,同じ結晶粒と判定されたステップ数が一定数以上にな った場合に,そのステップの集合を結晶粒と決定する.これは,キズなどにより正確な結晶方位が測 定できなかった場合のノイズなどを排除するフィルタの意味を持っている.本測定では,5 ステップ 以上の集合を結晶粒と決定することにした. 4.2.3 測定条件について RD (Drawing direction ) Drawing direction ND TD (Transverse direction) (Normal direction) Surface layer
Center layer RD (Drawing direction )
Drawing direction ND TD (Transverse direction) (Normal direction) Surface layer Center layer
TD (Transverse direction)
Drawing direction
RD (Drawing direction)
ND
(Normal direction)
Center layer
Surface layer
W=10~100μm RD (Drawing direction ) Drawing direction ND TD (Transverse direction) (Normal direction) Surface layerCenter layer RD (Drawing direction )
Drawing direction ND TD (Transverse direction) (Normal direction) Surface layer Center layer
TD (Transverse direction)
Drawing direction
RD (Drawing direction)
ND
(Normal direction)
Center layer
Surface layer
W=10~100μm40 μm
100 μm
Drawing direction
RD (Drawing direction)
TD (Transverse direction)
ND
(Normal direction)
Surface layer
Center layer
RD (Drawing direction ) Drawing direction ND TD (Transverse direction) (Normal direction) Surface layerCenter layer RD (Drawing direction )
Drawing direction ND TD (Transverse direction) (Normal direction) Surface layer Center layer
TD (Transverse direction)
Drawing direction
RD (Drawing direction)
ND
(Normal direction)
Center layer
Surface layer
W=10~100μm RD (Drawing direction ) Drawing direction ND TD (Transverse direction) (Normal direction) Surface layerCenter layer RD (Drawing direction )
Drawing direction ND TD (Transverse direction) (Normal direction) Surface layer Center layer
TD (Transverse direction)
Drawing direction
RD (Drawing direction)
ND
(Normal direction)
Center layer
Surface layer
W=10~100μm40 μm
100 μm
RD (Drawing direction ) Drawing direction ND TD (Transverse direction) (Normal direction) Surface layerCenter layer RD (Drawing direction )
Drawing direction ND TD (Transverse direction) (Normal direction) Surface layer Center layer
TD (Transverse direction)
Drawing direction
RD (Drawing direction)
ND
(Normal direction)
Center layer
Surface layer
W=10~100μm RD (Drawing direction ) Drawing direction ND TD (Transverse direction) (Normal direction) Surface layerCenter layer RD (Drawing direction )
Drawing direction ND TD (Transverse direction) (Normal direction) Surface layer Center layer
TD (Transverse direction)
Drawing direction
RD (Drawing direction)
ND
(Normal direction)
Center layer
Surface layer
W=10~100μm40 μm
100 μm
Drawing direction
RD (Drawing direction)
TD (Transverse direction)
ND
(Normal direction)
Surface layer
Center layer
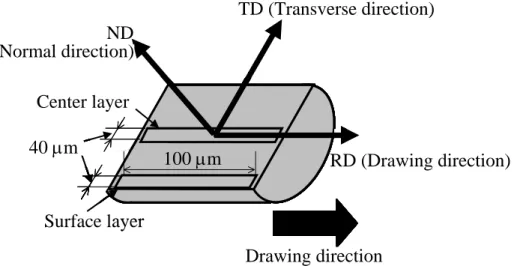
結晶方位の測定個所は線材の長手方向 L 断面の表層部と,中心部の 2 箇所とした.EBSD 測定での 材料座標系を Fig. 4.8 に示す.伸線方向と RD(Rolling Direction)を一致させ,測定面の法線方向を ND(Normal Direction)に一致させた.この 2 本の軸に垂直になるように TD(Transverse Direction)を 定めた.電子ビームの径や照射時間などの測定条件を Table 4.1 に示す.測定範囲は 40 μm × 100 μm とし,幅は付加的せん断ひずみ層の深さと一致させた.本測定は連続伸線材を対象としている.Fig. 4.9 に連続伸線された D = 1.0 mm の線材の組織写真を示す.結晶粒は伸線方向に延伸した形状であり,線 径方向の幅は数μm である.したがって,この測定範囲には集合組織を検討するのに十分な結晶粒数 が含まれていると判断した.Fig. 4.8 Material coordinate system and measurement area
Table 4.1 Measurement condition of EBSD
Beam diameter μm
Step distance μm
Irradiation time sec
Magnification of SEM
1.0
1.0
3.0
200 x
Beam diameter μm
Step distance μm
Irradiation time sec
Magnification of SEM
1.0
1.0
3.0
200 x
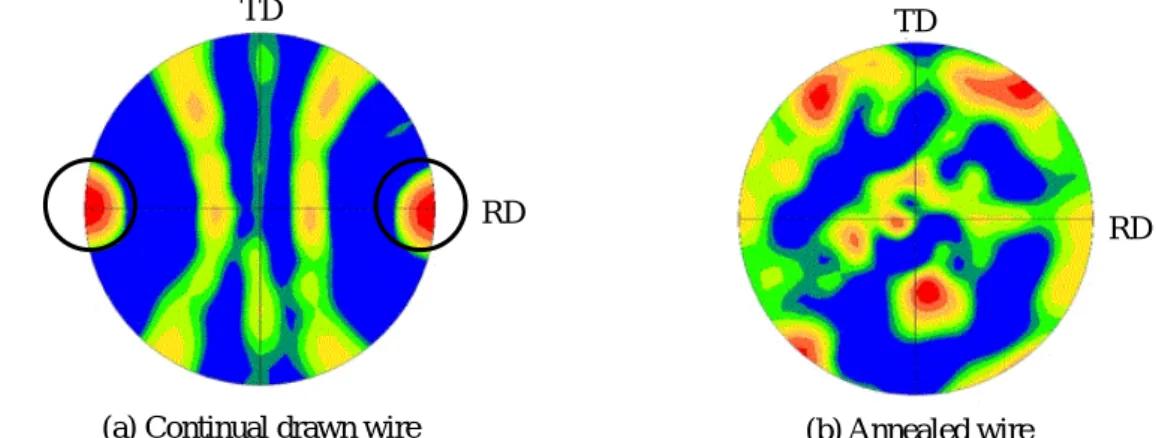
200 μm Measurement area 4.2.4 極点図について 集合組織は極点図によって解析されるのが一般的である.極点図はステレオ投影法で結晶方位を表 示する手法である.つまり,結晶格子の特定面を Fig. 4.8 に示す ND 上の視点から観察したさいの面 方向を示すことになり,配向の強弱を色別で表現している.本研究の極点図では,赤が最も強い方位 配向を,青が最弱の方位配向となる.例として Fig. 4.10 に,集合組織が発生した場合の極点図(a)と, 結晶方位がランダムの場合の極点図(b)を示す. 集合組織が発生している場合には,黒丸で囲んだように,ある特定の方位を示す位置にのみスポッ トが観察されている.一方で,ランダムの場合には,特定の位置のスポットは存在せず,方位の分布 が一様であることがわかる.このように,極点図の様相によって,集合組織発生を判断することがで きる. 一般的に結晶格子の基本面である{001},{110},{111}の 3 面を示した極点図から,この 3 種類の極 点図に矛盾しない結晶方位を決定する.
TD
RD
TD
RD
TD
RD TDRD
TD
RD
TD RDFig. 4.9 Microstructure of continual drawn wire
Fig. 4.10 Pole figure of continual drawn wire and annealed wire
4.2.5 素線の結晶方位 太線材の素線である D = 5.50 mm 材の測定結果を Fig. 4.11 に,細線材の素線である D = 1.00 mm 材 の測定結果を Fig. 4.12 に示す.測定結果より,D = 5.50 mm 材では,特に強い配向を示しておらず, 結晶方位がランダムであると判断できる.一方で,D = 1.00 mm 材の{110}極点図では,若干の RD 方 向への配向が観察されるが,それほど強い配向ではない.これは,D = 5.50 mm から D = 1.00 mm まで の連続伸線によって発生した集合組織が,焼鈍によって完全に除去されなかったためであると考えら れる.しかし,この程度の配向が初期線材にあったとしても,集合組織の発生にはほとんど影響がな く,全体的にほぼランダムであると判断した.
TD
RD
TD
RD
001TD
RD
TD
RD
110TD
RD
TD
RD
111 (a) Center layerRD RD RD TD TD TD
RD
TD
RD
TD
111RD
TD
RD
TD
110RD
TD
001RD
TD
TD TD TD RD RD RD (b) Surface layerR
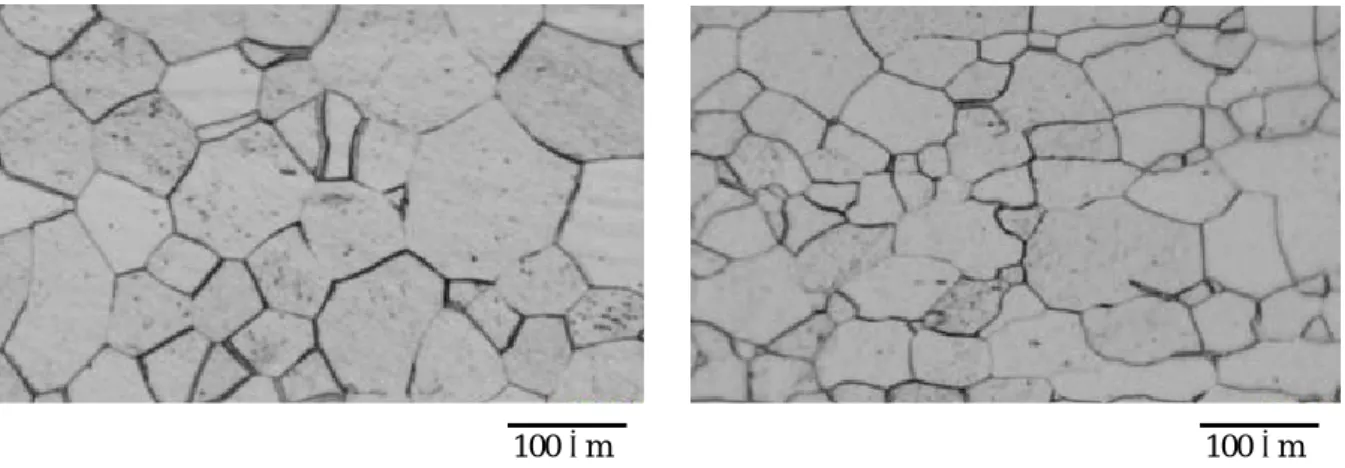
Fig. 4.13 に D = 5.50 mm 材と D = 1.00 mm 材の内部組織を示す.D = 1.00 mm 材では,わずかに伸線 方向に沿った結晶配向が見られるが,太線,細線素材ともにほぼ同じであるとみなした.結晶粒径に 関して,平均結晶粒径 dAVEをそれぞれ算出すると,太線材の場合では dAVE = 31.6 μm,細線材の場合 では dAVE = 25.8 μm となり,ほぼ同じ大きさの結晶粒であることが確認できた.このように,用意し た線材の初期状態は,太線材,細線材ともにランダム方位を持った素材であることが確認できた. 100 μm 100 μmFig. 4.13 Microstructure of 5.50 mm and 1.00 mm diameter wire before continuous drawing
(a) Microstructure of 5.5mm diameter wire (b) Microstructure of 1.0 mm diameter wire
Fig. 4.12 Pole figures of 1.00 mm wire
(a) Center layer
D
TD
RD
TD
001RD
TD
RD
TD
110RD
TD
RD
TD
TD TD TD RD RD RD 111 (b) Surface layerRD
TD
RD
TD
001RD
TD
RD
TD
110TD
RD
TD
R
TD TD TDD
RD RD RD 1114.3 集合組織の解析
4.3.1 {110}極点図について 連続伸線材の{110}極点図を Fig. 4.14 に示す.太線材と細線材の両方において,表層部と中心部に 大きな相違はなく, RD の位置にスポットが観察される.この結果より,結晶格子の{110}面が RD 方 位に強く配向していることがわかる.これは,bcc 金属において,伸線加工では,<110>方位集合組織 が発生するという従来の知見と一致した結果となった 1).また,RD にあるスポットのまわりの帯状 のスポットは,結晶格子内の他の{110}面を表している. (a) 0.77 mm wire (b) 0.10 mm wireTD
RD
TD
RD
TD
RD
Surface RD TDTD
RD
TD
RD
Center RD TDTD
RD
TD
RD
Center RD TDTD
RD
TD
RD
Surface RD TDFig. 4.14 {110} pole figure of 0.77 mm and 0.10 mm wire
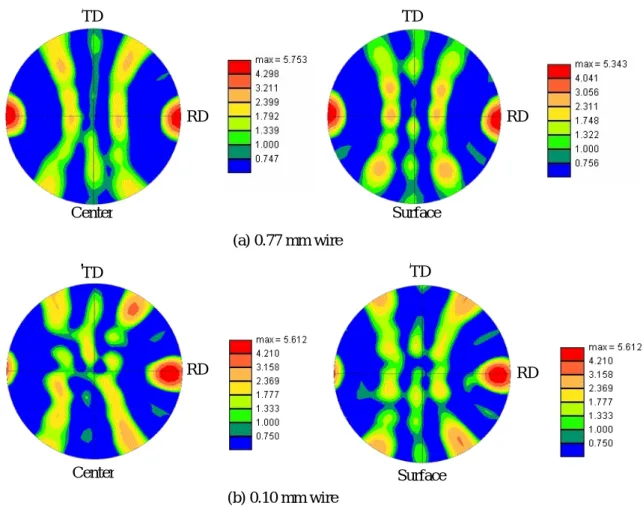
4.3.2 {001}極点図について つぎに,{001}極点図を Fig. 4.15 に示す.{001}極点図では,表層部と中心部で極点図の様相が異な る結果となった.中心部では,3 つのスポットが存在するのに対して,表層部では 6 つのスポットが 存在している.この観察結果は,太線材と細線材の両方で観察された.前述のように{001}極点図では ND 軸からの視点で,スポットのある位置が{001}面の方向を示している.基本的に,極点図上には結 晶格子面の重複度の半分が現れる.立方晶の全ての{001}面を Fig. 4.16 に示した.図から明らかなよ うに,1 つの結晶格子に対して{001}面は 6 つある.よって{001}面の重複度は 6 となり,{001}極点図 には 3 つのスポットが現れるのが一般的であり,6 つのスポットが現れる結晶方位は考えられない. そこで,この 6 つのスポットを 3 つずつに分け,2 つの結晶方位の存在を仮定し,分析することにし た.
(a) 0.77mm wire
TD
RD
TD
RD
Center RD TDTD
RD
TD
RD
Surface RD TDTD
RD
TD
RD
Center RD TD (b) 0.10 mm wireTD
RD
TD
RD
Surface RD TDFig. 4.15 {001} pole figure of 0.77mm and re
Fig. 4.16 {001} plane of bcc metal
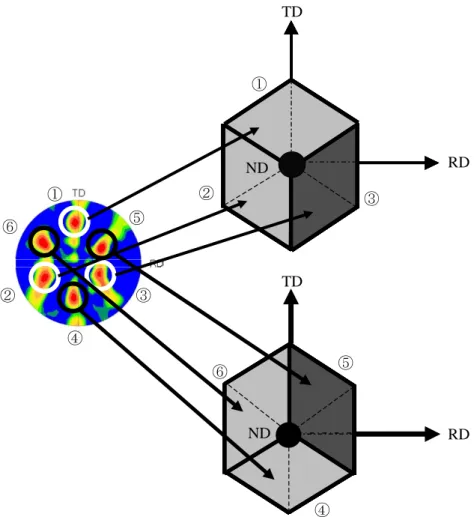
最初に中心部の極点図を解釈する.3 つのスポットから Fig. 4.17 に示す結晶方位が読み取れる.表 層部の極点図の解釈は,Fig. 4.18 に示すように,白枠の 3 つのスポットは中心部の極点図と同じ位置 にあり,同じ結晶方位を示していると考えた.よって,この 3 つのスポットで 1 つの結晶方位となり, 残りの黒枠の 3 スポットでは,Fig. 4.18 に示すもう 1 つの結晶方位が読み取れる.この 2 つの結晶方 位は幾何学的に RD 軸に対して線対称である. ① ② ③ ① ② ③ RD TD ND
Fig. 4.17 Crystal orientation found out from pole figure of center layer
① ② ③ ④ ⑤ ⑥ ① ② ③ ④ ⑤ ⑥ RD TD ND RD TD ND
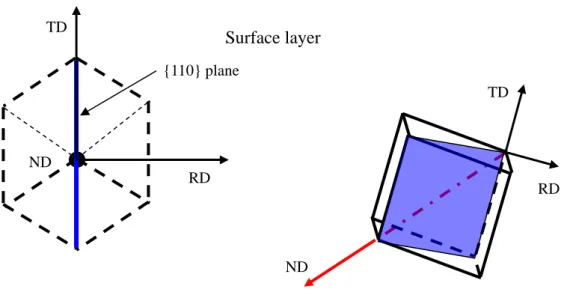
{001}極点図から読み取れた結晶方位の妥当性を検討する.中心部の極点図から読み取れる結晶方位で は,Fig. 4.19 に示すように,2 次元表示では矢印で示した面,3 次元表示では色付けした面が{110}面 を表し,面方向が RD と一致していることが確認できる.さらに,表層部で読み取れたもう 1 つの結 晶方位に関して検討する.Fig, 4.20 に表層部で観察された第 2 の結晶方位を示す.色づけした面が{110} 面を表し,面方向が RD と一致している.以上の検討によって,中心部で観察された結晶方位,およ び表層部で観察された 2 つ結晶方位のそれぞれに,RD と一致する面が存在している.このように, {110}極点図で読み取れた結晶方位の知見と矛盾点はなく,{001}極点図から読み取れた結晶方位は妥 当であると考えられる. {110} plane RD TD ND ND TD RD
Center layer
Fig. 4.19 {110} plane of crystal lattice fund out from pole figure of center layer
Fig. 4.20 {110} plane of crystal lattice fund out from pole figure of surface layer
{110} plane RD TD ND RD TD ND
Surface layer
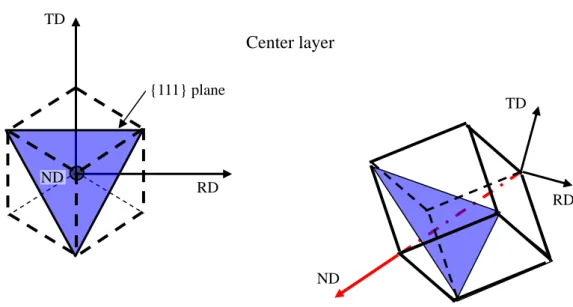
4.3.3 {111}極点図 最後に{111} 極点図について検討する.先に示した 2 つの結晶方位の{111} 面に着目すると,両方 の結晶方位において,Fig. 4.21,4.22 に示すように 1 つの{111} 面方位が ND と一致している.よって, {111} 極点図上では,ND にスポットが存在することが考えられる.Fig. 4.23 に中心部と表層部の{111} 極点図を示す.図中に黒丸で囲んだように,すべての極点図から明らかなように,ND にスポットが 観察された. TD ND RD RD TD ND {111} plane
Fig. 4.21 {111} plane of crystal lattice found out from pole figure of center layer
RD ND TD RD ND TD {111} plane
Fig. 4.22 {111} plane of crystal lattice found out from pole figure of surface layer
Center layer
RD TD Center RD TD Surface (a) 0.77 mm wire さらに,{111}極点図において,Fig. 4.17,4.18 で示した結晶方位の妥当性を確認するため,その他 の{111}面に関して検討する.{111}面の法線方向は,立方晶の対角線と一致するので,極点図で示さ れるスポットの位置は,読み取った結晶方位の頂点と一致する.この観点から,極点図を観察すると, Fig. 4.24,4.25 に示すように,立方晶の頂点と極点図のスポットの位置が一致している. (b) 0.10 mm wire RD TD TD RD Center Surface
Fig. 4.23 {111} pole figure of continual drawn wire
RD TD ND ① ② ③ RD TD ① ② ③
RD TD ① ② ③ ④ ⑤ ⑥ ④ ⑤ ⑥ RD TD ND ③ ① ② RD TD ND
Fig. 4.25 Other {111} planes in pole figure of surface layer
このように{111}極点図においても,読み取った結晶方位と極点図のスポットの位置に矛盾は生じて いない.よって,中心部に発生している結晶方位は,Fig. 4.17 に示す方位となる.一方,表層部には 2 つの結晶方位が発生し,第 1 の結晶方位は中心部と同じであり,第 2 の結晶方位は Fig. 4.18 に示す 方位となることが決定した.以上より,中心部と表層部の集合組織方位が解析できた.このことを Fig.
4.26 に模式的に示す.
Crystal orientation generated primarily
Crystal orientation rotated by additional shear deformation
このうち,中心部,表層部の両方で観察された結晶方位が,伸線加工によって優先的に発生する結 晶方位であり,安定方位であると考えられる.一方,表層部のみで観察された第 2 の結晶方位は,付 加的せん断変形が加わることによって,発生する結晶方位であると考えられる.したがって,この第 2 の結晶方位はせん断ひずみ層のみで発生していると考えられる.第 2 章,および第 6 章において詳 surface surface Center Drawing direction
Two crystal orientations exist at surface layer
One crystal orientation exist at center layer
Crystal orientation generated primarily
Crystal orientation rotated by additional shear deformation
surface surface Center surface surface Center Drawing direction Drawing direction
One crystal orientation exist at center layer
Two crystal orientations exist at surface layer
方位は最表層部において発生率が高く,中心部にかけてその発生率は減少し,表層からの深さが 60 μm 以上の領域では第 2 の結晶方位の発生はないと考えられる.次節では,判明したそれぞれの結晶方位 について,さらに結晶学的に考察することにする.
4.4 考察
4.4.1 中心部の結晶方位の安定性 中心部の結晶方位は bcc 金属の伸線集合組織の最終安定方位であると考えた.そこで,伸線加工に 対する結晶方位の安定性を説明するために,各すべり系に対する Schmid Factor Fsを計算し,すべり系 の活動から結晶格子の回転を考察した. bcc 金属のすべり系について説明する.bcc 金属のすべり方向は<111>の 1 方向しかない.しかし, すべり面に関しては,現段階で{110},{112},{123}の 3 種類が確認されている.1 つの結晶格子に{110} は 6 面,{112}は 12 面,{123}は 24 面ある.このうち{110}面にだけすべり方向が 2 つあり,{112}, {123}面にはそれぞれ 1 つずつすべり方向がある(Fig. 4.27 参照)9). {110} <111> {112} <111> {123} <111> 合計して 48 個のすべり系が存在する.この中でも,{110}面のすべり系が変形の大部分を占めてい る.よって本研究では,{110}<111>のすべり系に対してのみ,Schmid factor Fsを計算することにした. Schmid Factor Fsはある応力状態において,最大のせん断応力が負荷されているすべり系を判断するた めの指標である.Fig. 4.28 に示すような単軸引張り応力状態とすべり系の方向が定まっている時に, Schmid Factor は式(4.1)によって定義される1).ここで,ψはすべり面と,φはすべり方向のそれぞれ が応力方向となす角度を示している.Fig. 4.27 Slip-system of bcc metal
Fig. 4.28 Sltress condition of uni-axis tensile
P P
Normal of slip plain
ψ φ
Tensile axis
Slip direction
(4.1) Schmid factor Fs= cos ψ・cos φ
伸線加工中の線材中心部の応力状態は,Fig. 4.29 に示すような 2 次元応力状態となる.伸線方向に 引張り,半径方向に圧縮応力が作用している.引張りと圧縮応力が作用する応力状態の場合の Schmid Factor Fsは式(4.2)で与えられる 1).角度表示については,ψがすべり面の法線方向と応力軸のなす 角度を表し,φはすべり方向と応力軸のなす角度を示している.また,添え字については,T が引張り 軸との角度,C が圧縮軸との角度を示している.
Schmid Factor Fsの計算結果を Table 4.2 に示す.表中の T は引張り軸との角度,C は圧縮軸との角度
を表している. Compressive axis Tensile stress Compressive stress Slip plain Slip direction Tensile axis slip plain Normal of ψT ψC φT φC
Fig. 4.29 Sltress condition of center layer in drawing
(4.2) Schmid factor Fs= cos ψT・cos φT-cosψc・cosφc
Table 4.2 Calculated schmid factor for each slip system
(101)[111]
Slip system
ψ deg
φ deg
Schmid factor F
s 107 120 120 35 (101)[111] (101)[111] (101)[111] (011)[111] (011)[111] C T C T C T C T C T C T 107 1200.545
150 60 150 60 107 60 (011)[111] C T (011)[111] C T (110)[111] C T (110)[111] C T (110)[111] C T (110)[111] C T No. ② ① ③ ⑥ ④ ⑤ ⑦ ⑧ ⑨ ⑩ ⑪ ⑫ 107 60 150 120 150 120 55 90 55 90 90 0 90 0 20 90 90 90 120 145 120 145 20 90 90 90 120 35 118 35 118 145 90 90 20 900.274
0
0.842
0.545
0.274
0
0.842
0.269
0.269
0
0
C T C T C T C T C T C T C T C T C T C T C T C T (101)[111]Slip system
ψ deg
φ deg
Schmid factor F
s 107 120 120 35 (101)[111] (101)[111] (101)[111] (011)[111] (011)[111] C T C T C T C T C T C T 107 1200.545
150 60 150 60 107 60 (011)[111] C T (011)[111] C T (110)[111] C T (110)[111] C T (110)[111] C T (110)[111] C T No. ② ① ③ ⑥ ④ ⑤ ⑦ ⑧ ⑨ ⑩ ⑪ ⑫ 107 60 150 120 150 120 55 90 55 90 90 0 90 0 20 90 90 90 120 145 120 145 20 90 90 90 120 35 118 35 118 145 90 90 20 900.274
0
0.842
0.545
0.274
0
0.842
0.269
0.269
0
0
C T C T C T C T C T C T C T C T C T C T C T C T 計算結果から④と⑧のすべり系が最も Schmid Factor Fsが大きいことがわかる.よってこのすべり系 が最も活動的である.この 2 つのすべり系の Schmid Factor Fsは同値であり,同程度に活動的であると 考えられる.この 2 つのすべり系が活動した場合の結晶回転を解析する.ここで,単純引張り,およ び圧縮変形における結晶回転の研究による知見 2) を説明する.引張り変形の場合は,活動するすべり 系のすべり面の法線方向が,引張り軸と垂直方向に一致し,すべり方向が引張り軸と一致するように 結晶は回転する.一方,圧縮変形の場合は,引張りの場合の反対で,すべり面の法線方向が圧縮軸に 一致し,すべり方向が圧縮軸と垂直になるように結晶は回転する.伸線加工中の線材中心部のように, 引張りと圧縮の 2 次元応力状態では,引張りと圧縮変形のそれぞれの結晶回転が複合されて発生する と考えられる.最初に,⑧のすべり系が活動した場合の結晶回転を考察する.Fig. 4.30 (a)に⑧のすべ り系を示す.図示したすべり面の法線方向は引張り軸から離れ,圧縮軸に近づき,すべり方向は,逆 に圧縮軸から離れ,引張り軸に近づくように結晶回転する.このような回転は,ND を軸として時計 回り方向となる.つぎに,④のすべり系が活動した場合の結晶回転について説明する.Fig. 4.30 (b)に ④のすべり系を示す.すべり面の法線方向とすべり方向の挙動が上述と同じになる結晶回転は,ND 軸とした反時計回り方向になる.RD RD TD TD ND ND (Tensile axis) (Compressive axis) [111] Slip direction (011) Slip plane Normal direction of slip plane
(a) Crystal rotation generated by (011)[111] slip system
RD RD TD TD ND ND (Tensile axis) [111] Slip direction (Compressive axis)
(101) Slip plane Normal direction of slip plane
[111] Slip direction
(b) Crystal rotation generated by (101)[111] slip system
した場合は,結晶格子が時計回り方向に回転する.その結果,Fig. 4.31 に示すように結晶方位が変化 する.それにともなって,各すべり系の Schmid Factor Fsも変化する.回転角度を5 deg とした場合の
各すべり系の Schmid Factor Fsの変化を Table 4.3 に示す.この結果からわかるように,⑧のすべり系
の Schmid Factor Fsが小さくなり,第 2 のすべり系である④の数値が大きくなっている.すると,活 動するすべり系のバランスが変わり,④のすべり系の方が活動しやすくなる.その結果として,結晶 格子は反時計周りに回転し,最終的には元の結晶方位に戻ってしまう.④のすべり系が最初に活動し た場合では,途中の回転が反対になるだけで同じことが当てはまる.結局,結晶格子は ND を軸とし た時計回りと反時計回りの小さな回転を繰り返しながら変形が進行する結果となる.よって,この結 晶方位は伸線加工では大きく変化することがなく,最終安定方位であると考えられる. TD RD ND TD RD ND TD RD ND
Fig. 4.31 Rotation of crystal lattice for clockwise direction around ND
Table 4.3 Schmid factor after clockwise rotation Slip system ψ deg φ deg Schmid factor Fs No. C T 145 55 ④ 125 140
0.910
(101)[111] C T C T ⑧ 155 115 115 300.749
(011)[111] C TSlip system ψ deg φ deg Schmid factor Fs No. C T 145 55 ④ 125 140
0.910
(101)[111] C T C T 145 55 ④ 125 1400.910
(101)[111] (101)[111] C T C T ⑧ 155 115 115 300.749
(011)[111] C T C T ⑧ 155 115 115 300.749
(011)[111] (011)[111] C T4.4.2 表層部集合組織について 前節の極点図の解析によって,表層部の集合組織には結晶方位が 2 つ存在することが判明した.本 節では表層部に 2 種類の結晶方位が存在する理由を考察する.前節で述べたように,伸線加工中の結 晶格子は,最終方位に向かって回転している.表層部では,この最終方位に向かう結晶回転の他に, 付加的せん断変形による結晶格子の回転が新たに加わったと考えた.そこで,第 2 の結晶回転を確認 するために連続伸線中にサンプルを取り出し,EBSD によって結晶方位を測定した.それぞれの線径 における{001}極点図を Fig. 4.32 に示す.真ひずみが 1.45 に相当する線材に対して結晶方位を測定し た結果(a)では,主に 1 つの結晶方位しか確認できない.この結晶方位は前述の中心部の結晶方位と同 じ方位である.しかし,真ひずみが 2.35 まで伸線した場合には第 2 の結晶方位が確認できる.まず, 白丸で囲んだ 3 つのスポットは先の結晶方位と同じであるため,最終方位であると考えられる.残り の黒丸で囲んだ 5 つのスポットで Fig. 4.33 (b)に示す結晶方位が読み取れる.この結晶方位は伸線に対 する安定方位から RD を軸として回転した結果,発生した結晶方位であると考えられる.さらに伸線 加工された状態(真ひずみが 3.51 の場合)では,RD を軸として結晶格子はさらに回転している.Fig. 4.32 (c)の黒丸で囲んだ結晶方位を読み取ると,Fig. 4.33 (c)に示す方位となる.この結晶方位は前節で 判明した,表層部における第 2 の結晶方位である.Fig. 4.32 (d)より連続伸線後でもこの結晶方位は変 化していないことが確認できる.この観察によって,表層部には中心部にはない第 2 の回転が発生し ていることがわかった. TD TD RD RD TD TD RD
Fig. 4.32 Pole figure of surface layer in continual drawing
(a) ε = 1.45 (b) ε = 2.35
(c) ε = 3.51 (d) ε = 3.93
RD TD ND RD TD ND RD TD ND (a) (b) (c)
Fig. 4.33 Crystal rotation of surface layer in continual drawing
以上のように,線材表層部には,中心部には発生しない第 2 の結晶回転が観察された.この結晶回 転は表層部に付加的せん断変形が加わる結果として発生していると考えられる. 第 2 の結晶回転の発生要因について検討する.ここでは,初期状態を Fig. 4.33 (a)に示した結晶方位 として考察を進めることにする.前述したように,伸線加工における表層部では半径方向に圧縮され つつ軸方向に伸びる変形とダイスとの摩擦によるせん断変形が加わっている.この二つの変形はそれ ぞれ異なる変形モードであり,対応するすべり系も異なっていると考えられる.このうち,前者の変 形に対応するすべり系は 4.4.1 節で述べた.つぎに,付加されたせん断変形に対応するすべり系に関し て考察する.せん断変形に対応するすべり系は Fig. 4.34 に示すように,幾何学的にすべり方向が伸線 方向と平行であり,すべり面法線が伸線方向と垂直になっていると考えられる.
Fig. 4.34 Geometric condition of slip system for additional shear deformation
Drawing direction (RD) Normal direction of slip plane
Fig. 4.33 (a),(b)に示した結晶方位において,最もすべり易い{110}<111>すべり系ではこの幾何学的
条件に当てはまるものは存在しない.そこで,副次すべり系として{112}<111>,{123}<111>すべり系 について検証すると,Fig. 4.35 に示す{123}<111>すべり系が,せん断変形に対応する幾何学的条件に 一致している.したがって,この{123}<111>すべり系が幾何学的条件と一致するために,Fig. 4.36 に 示すように RD 方向を軸とした結晶回転が発生していると考えられる.図中の数字は{123}面のそれぞ れの頂点を示しており,Fig. 4.36 (b)において,Fig. 4.36 (a)で示した数字と一致している頂点が結晶回 転によって移動した位置を表している.また,この数字は Fig. 4.35 に示した数字とも対応している. ① ND RD {123}<111> slip system TD Slip direction Slip plane ② ③
Fig. 4.35 Geometric condition of {123}<111> slip system
TD TD ③ ② {123}<111> slip system ND RD ND ① RD ① {123}<111> slip system ② ③ (a) (b)
Fig. 4.36 Displacement of {123}<111> slip system in crystal rotation
表層部では第 2 の結晶回転が発生するため,中心部と比較して,表層部の結晶粒内には結晶方位差 が生じやすいことが考えられる.このようにして生じた結晶方位差が結晶粒界と同様に,転位伝播を 抑制するならば,結晶粒微細化と同じ効果になると予想できる.したがって,次章では,このような 観点から,表層部における結晶粒微細化に着目し,表層部の内部組織変化と引張り強さの関係を言及 する.
せん断ひずみ層は中心部と比較して引張り強さが高いことが前章までに確認された.本章では,せ ん断ひずみ層の引張り強さ向上を結晶学的に検討するため,集合組織に着目した.低炭素鋼線 SWRM6 の連続伸線材を対象として,EBSD によって集合組織を測定した.この集合組織を解析することよっ て,伸線加工中の中心部と表層部における結晶回転の挙動を把握し,両者を比較してせん断ひずみ層 のある表層部結晶組織の変化を検討した.その結果,得られた知見を以下にまとめる. (1) 連続伸線材の集合組織を測定した結果,中心部には 1 つの結晶方位のみが観察された.それに対 して,表層部では 2 つの結晶方位が測定された.このように,中心部と表層部の集合組織には相違点 がある. (2) 中心部で観察された結晶方位のすべてのすべり系において,Schmid factor Fsを用いて考察し,伸 線加工中に 2 つのすべり系が活動的であることが判明した.この 2 つのすべり系によって発生する結 晶回転は正反対であり,どちらか一方が活動し結晶回転を起こすと,その反動でもう一方が活動しや すくなり,正反対の結晶回転を起こす.結果として元の結晶方位にもどる.このように,小さな結晶 回転を繰り返し,大きな結晶方位変化がないと考えられ,伸線加工に対する最終安定方位であること を示した. (3) 連続伸線途中の線材において,表層部の結晶回転を観察した.表層部では,中心部では発生して いない結晶回転が観察された.この結晶回転は付加的せん断変形が加わることによって,発生してい ることが考えられる. 参考文献 (1) 稲数直次:金属引抜,(1985),近代編集社. (2) 長嶋晋一 編著:集合組織,(1984),丸善. (3) 稲垣裕輔:集合組織の現状と課題-Taylor モデルの問題点と限界-,金属誌,69-3 (2005),283-290. (4) R. W. Armstrong : The influence of polycrystal grain size on several mechanical properties of materials,
Metall. Trans., A, 1 (1970), 1169-1176.
(5) W. F. Hosford and W. A. Backofen : Fundamentals of deformation processing, (1964), Syracus Univ. press.
(6) 杉山昌章:局所方位解析技術を活かした材料組織制御の新展開,Materia Japan,40 (2001),611-659. (7) [社] 日本顕微鏡学会 編:電顕入門ガイドブック,(2004),学会出版センター.
(8) David B. Williams and C. Barry Carter : Transimission electron microscopy, Diffraction, (1996), Plenum press.