卒業研究報告
小型飛翔体向けパラシュート自動開傘システムの基礎開発
報 告 者
学籍番号: 1150127
氏名:
平林 大和
指 導 教 員
山本 真行 教授
平成 27年 2 月 16 日
高知工科大学 システム工学群 航空宇宙工学専攻
I 目次 第一章 序論・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・1 1-1 背景・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・1 1-2 目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・2 第二章 パラシュート自動開傘システムの開発 2-1 モデルロケット分離機構部の概要・・・・・・・・・・・・・・・・・・・・・2 2-1-1 バネの選定・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3 2-1-2 糸の選定・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3 2-1-3 ニクロム線カッター・・・・・・・・・・・・・・・・・・・・・・・・・4 2-1-4 開発した分離機構部・・・・・・・・・・・・・・・・・・・・・・・・・・・4 2-2 使用するモデルロケットの開発・・・・・・・・・・・・・・・・・・・・・・・6 2-2-1 モデルロケットの設計・・・・・・・・・・・・・・・・・・・・・・・・・・7 2-2-2 使用するエンジン・・・・・・・・・・・・・・・・・・・・・・・・・・・・9 2-2-3 開発したモデルロケット・・・・・・・・・・・・・・・・・・・・・・・・10 2-3 搭載機器部の開発・・・・・・・・・・・・・・・・・・・・・・・・・・・・・11 2-3-1 Arduino Pro Mini・・・・・・・・・・・・・・・・・・・・・・・・・・・11 2-3-2 MMA7361 加速度センサ・・・・・・・・・・・・・・・・・・・・・・・・12 2-3-3 LPS331AP 気圧センサ・・・・・・・・・・・・・・・・・・・・・・・・・13 2-3-4 CR2032 ボタン電池・・・・・・・・・・・・・・・・・・・・・・・・・・14 2-3-5 MicroSD カードスロット・・・・・・・・・・・・・・・・・・・・・・・14 2-3-6 リポバッテリー・・・・・・・・・・・・・・・・・・・・・・・・・・・・15 2-3-7 開発した搭載機器部・・・・・・・・・・・・・・・・・・・・・・・・・・16 第三章 性能試験・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・17 3-1 試験方法・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・17 3-2 予備試験・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・19 3-2-1 第1回制御機器予備試験・・・・・・・・・・・・・・・・・・・・・・・・19 3-2-2 第2回制御機器予備試験・・・・・・・・・・・・・・・・・・・・・・・・22 3-2-3 分離機構地上試験・・・・・・・・・・・・・・・・・・・・・・・・・・・25 3-3 本試験・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・25 3-3-1 第 1 回本試験・・・・・・・・・・・・・・・・・・・・・・・・・・・・・25 3-3-2 第 2 回本試験・・・・・・・・・・・・・・・・・・・・・・・・・・・・・28 3-3-3 第 3 回本試験・・・・・・・・・・・・・・・・・・・・・・・・・・・・・32
II 第四章 試験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・35 4-1 予備試験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・35 4-2 分離機構地上試験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・38 4-3 本試験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・39 第五章 考察およびまとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・43 5-1 考察・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・43 5-1-1 予備試験についての考察・・・・・・・・・・・・・・・・・・・・・・・・43 5-1-2 分離機構地上試験についての考察・・・・・・・・・・・・・・・・・・・・43 5-1-3 本試験についての考察・・・・・・・・・・・・・・・・・・・・・・・・・43 5-2 性能評価・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・45 5-3 課題・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・45 第六章 結論・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・46 謝辞・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・47 参考文献・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・48 付録・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・50
1
第一章 序論
1-1 背景
近年、中学・高校の理科教育の一環としてモデルロケットなどの小型ロケットが利用さ れるようになっており、普及が進みつつある。また、モデルロケットの全国大会も開かれ てきており、人工衛星をペイロードとして想定し、その一部であるカメラや計測機器など の小型電子機器をモデルロケットに搭載し、機体分離やパラシュート展開などの機構を制 御するなど、高度な技術も開発されている。 モデルロケットとは、火薬(黒色火薬、コンポジット推進薬)を使用した比較的小型の 固体ロケットである。危険防止等の観点から、主な材料は紙やプラスチックで作られるこ とが多く、パラシュートやストリーマーなどの回収装置を付けることで再利用が可能であ る。高度数十 m から数百 m まで到達することができ、大型モデルロケットでは高度数 km に到達するものもある。現在の記録では、2004 年 5 月 17 日に民間人によって打ち上げら れた大型モデルロケットが最終高度115.87 km に到達している[1]。 しかし、モデルロケットの全国大会や大学オープンキャンパスのイベントでモデルロケ ットを打ち上げる際、丁寧にロケットを設計してもパラシュートが開放・展開されないこ とが散見され、ロケット機体の着地・破損状況によっては再利用不可になり、搭載するセ ンサの破損だけでなく、基準に沿った十分な保安対策を講じている中であっても、急激な 落下による事故の可能性は否定できない。これらを安全に回収するためには、パラシュー トを確実に放出し展開させることが必要である。1-2 目的
本研究では、モデルロケット理科教室などで使用率の高いA 型、B 型、C 型エンジンの 中で、最も搭載可能ペイロード質量が大きいC 型エンジンを使用し、モデルロケットに搭 載するパラシュート自動開傘システムを開発して、モデルロケットが確実かつ安全にパラ シュートによって着陸・回収可能となることを目的とする。2
第二章 パラシュート自動開傘システムの開発
2-1 パラシュート自動開傘システム
開発するパラシュート自動開傘システムは、分離機構部と制御機器部の2 つから成るも のであり、機構が分離する原理としてはモデルロケット発射後、あらかじめシミュレーシ ョンで得られるロケット最高高度における気圧を算出しておき、搭載する気圧センサが設 定した気圧に達すると分離機構が動作する仕様である。制御機器部と分離機構部を、図2-1 に示すように固定したナイロン糸をニクロム線で焼き切り、3本のバネの反発力によって 両者が分離され、ノーズコーン側が押し出されてパラシュートが開くという機構である。 また、安全対策として加速度センサを搭載し、モデルロケット発射時に発生する加速度を 感知するまでは分離機構は動作しないソフトウェア・アーミングの仕組みを採用した。分 離機構の原理図を図2-1 に、制御機器部のフローチャートを図 2-2 に示す。 図2-1 分離機構の原理3 図2-2 制御機器部のフローチャート
2-1-1 バネの選定
モデルロケットには質量制限があり、分離機構はなるべく小型かつ軽量にしなければな らない。バネを選定する際にはそれらを満たしつつ、ある程度のバネの反発力が必要であ る。この条件に合うように、今回は外径φ=7.5 mm、自由長 23 mm、最大荷重 0.95 kg、 ばね定数0.665 N/mm のバネを選定した。これを3本使用し、9 mm 圧縮した状態で固定 する。2-1-2 糸の選定
3本のバネの反発力は、パラシュート及びノーズコーンをモデルロケットのボディから 分離させるだけの力大きさが必要であり、それを固定するために強度のある水糸を採用し た。使用した水糸の材質はポリプロピレンの直径0.6 mm である(図 2-3)。4 図2-3 蛍光水糸(儀助製)[2]
2-1-3 ニクロム線カッター
分離機構では水糸を何らかの方法で切断しなければ動作しない。今回使用するニクロム 線は非常に軽量で場所をとらず、電流を流せば熱で糸を切断できる点を評価し、利用する ことにした。ニクロム線は直径0.26 mm で 5 cm 使用する(図 2-4)。 図2-4 ニクロム線(ELPA 製)[3]2-1-4 開発した分離機構部
分離機構部は3段構成となっており、円形のアルミ板(肉厚0.1 mm)をボルトとナット で固定してある。以下、それぞれのアルミ板をノーズコーン側(上側)から順に1段目、 2段目、3段目と呼ぶことにする。1段目はノーズコーンとの間にパラシュート摩擦力の みで固定して収め、このアルミ板自体バネの反発力で飛び出す部分(ノーズコーンとパラ シュートはともに糸で機壁に固定されており、衝撃で展開する)、2段目はバネ機構の視点、 3段目は水糸の張力調整具の部分となっている。以下に開発した分離機構と各アルミ板の 設計図を示す。5
図2-5 開発した分離機構の上部 図 2-6 開発した分離機構の側面 図2-7 分離機構の各段の寸法 使用方法はまずバネを最大圧縮した状態にするために図2-8 のように1段目と2段目を ナットで固定する。1段目の3箇所に開けた直径2.5 mm の穴に水糸を1本ずつ計3本通し て上側で結び、1段目と2段目の間でも結び1本以外を切り落とす。その1本を3段目に ある水糸張力調整具(ターンバックルによる固定器具)(図2-9 参照)になるべく2段目に 近い場所で結び付け、さらにホットボンドで水糸と器具を固定させる。 図 2-8 バネ機構をナットで固定した様子 図 2-9 3段目の水糸張力調整具固定具
6 ホットボンドが固まったら固定器具を締め、水糸を張る。そして張った水糸に図2-11 の ようにニクロム線を巻いて固定させれば分離機構が使用可能になる。 図2-10 ニクロム線を巻いた水糸 図 2-11 ニクロム線を固定するネジ器具
2-2 使用するモデルロケットの開発
本研究の試験方法は予備試験と本試験から成っており、使用するモデルロケットはそれ ぞれ異なる。モデルロケットの開発環境は、オープンソースのモデルロケット設計支援ソ フトウェア「OpenRocket」[4]を利用した。同ソフトウェアによりロケットデザイン・フラ イトシミュレーションなどの解析を行うことができる。デザインの項目ではノーズコーン やボディチューブなどの材質、長さ、太さなどのパラメーターを変えることができ、重心 と圧力中心の位置・安定性を求めることができる。ここでは本試験に使用するモデルロケ ットを記載する。図2-12、図 2-13 は「OpenRocket」の概要である。 図2-12 モデルロケットデザイン例 図 2-13 フライトシミュレーション例2-2-1 モデルロケットの設計
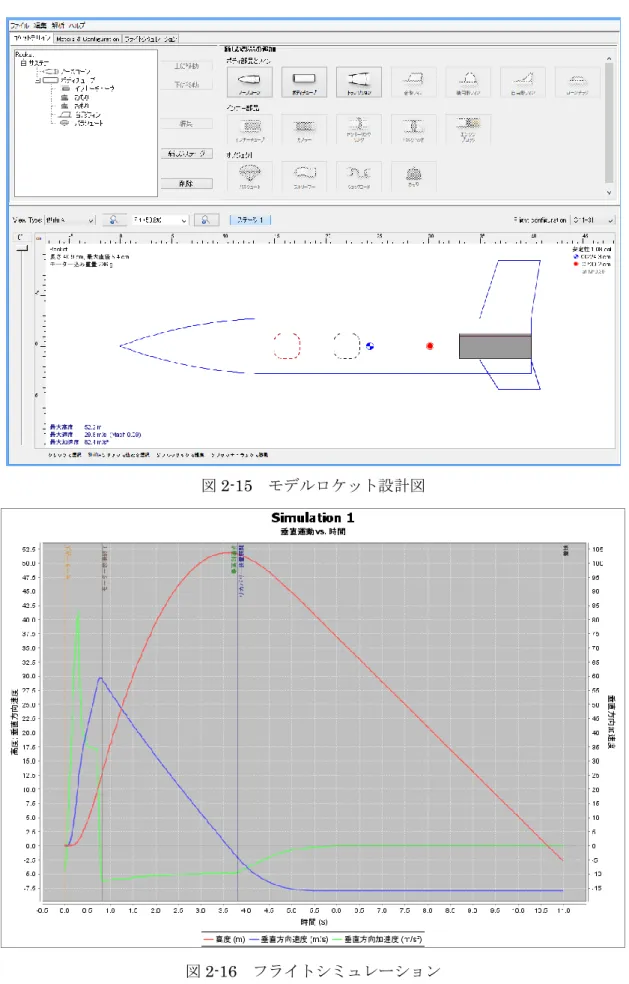
本実験で使用するモデルロケットは飛行安定性を重視し、安定比を1~2 の間に収まるよ うに設計した。通常安定比は1~1.5 の値が理想とされるが、今回の研究で使用するモデル ロケットの安定比はすべて安定比1~2 の値である。そのためにはロケット機体の重心(CG)7 と圧力中心(CP)の位置が重要である。 重心とはエンジンを含めたモデルロケットの質量の中心のことで、ロケットの運動量や 位置エネルギーがこの1点に集中していると考え、質点の運動にて近似できる重要な点で ある。ロケットが並進したり、回転したりするときもこの点が中心となる。 圧力中心とは飛行中のロケットを考えるとき、各部にそれぞれ空気の圧力がかかる際、 この圧力を計算上まとめて1 つの力として扱える点のことである。 図2-14 モデルロケットの重心と圧力中心[5] 図2-14 のときロケットが迎え角 a をもって飛行すると圧力中心が重心より後方にあれば (ポジティブ)迎え角を小さくしようとするモーメントが発生し、ピッチ振動をしながら 概ねセットされた方向に上昇する。一般に長い機体は縦慣性が大きく、緩やかな振幅の大 きい振動をしながら上昇するのに対し、短い機体は細かい振動をしながら上昇する。 圧力中心と重心が同じ位置(ニュートラル)にある場合、モーメントは働かないので慣 性力と推力の合成された方向へ飛行するが、風や発射台上で何らか機体の姿勢変化要素が あると、極端な変動方向を伴う。圧力中心と重心が逆転している場合(ネガティブ)、迎え 角はますます大きくなるようにモーメントが働くので、ロケット機体にピッチ回転を与え るため、大きく回転する。 このようなことを考慮してモデルロケットの設計を行った(図2-15)。表 2-1 と図 2-16 に今回のモデルロケットの設計仕様とフライトシミュレーションの結果をそれぞれ示す。
8
図2-15 モデルロケット設計図
9 表2-1 設計したモデルロケット性能表
2-2-2 使用するエンジン
本実験では予備試験及び本試験共にC 型エンジン(図 2-17)を使用した。また、C 型エ ンジンを採用した理由としては手軽に購入できるA 型、B 型、C 型エンジンの中では最も 大きい搭載質量を打ち上げ可能であり、分離機構部と搭載機器部の開発に十分な質量マー ジンを持たせることができると考えたからである。表2-2 にその仕様を記載する。 図2-17 C11-3 エンジン 表2-2 C11-3 エンジン仕様 長さ[mm] 400 最大高度[m] 52.2 最大外形[mm] 54 最大速度[m/s] 29.8 エンジン込質量[g] 286 最大加速度[m/s²] 82.4 安定性 1.08 モデルロケットの性能 直径[mm] 24 総推力[N・s] 10 長さ[mm] 70 平均推力[N's] 11 火薬量[g] 14.2 最大推力[N's] 22.1 エンジン質量[g] 32.2 燃焼時間[s] 0.8 総飛行可能質量[g] 170 延時時間[s] 3 C11-3エンジン仕様10
2-2-3 開発したモデルロケット
開発した本試験用モデルロケットはノーズコーン・ボディ・搭載機器収納筒・収納筒カ バーの4つのパーツから成っており、全長は約40 cm、質量はエンジン抜き 75.5 g である。 組み立て完成したモデルロケットの外観を図2-19 に示す。 図2-18 右から制御機器収納筒、収納筒カバー、 図 2-19 組み立てたモデルロケット ボディ、ノーズコーン 図2-18 のフィンが付いているボディの上部はバルサ材で塞いでいる。これはエンジンに よるパラシュート放出用の延時薬(逆噴射)が上に設置してある搭載機器部や分離機構部 に当たらないような設計にする必要があり、このように製作した。しかし、パラシュート 放出薬を密閉してしまうとボディが破損する危険性があるため、バルサ材から20 mm 下の ボディの壁に大きさ20 mm×20 mm の穴を6箇所均等に作り、ここからパラシュート放出 薬を逃がすことにした(図2-20 参照)。 図2-20 パラシュート放出薬用の穴11
2-3 制御機器部の開発
パラシュート自動開傘システムの開発環境は Arduino マイコンを採用した。Arduino 言語 はC/C++をベースにしており、C 言語のすべての構造と、いくつかの C++の機能をサポー トしている。また、AVR Libc にリンクされていて、そのライブラリ関数を利用することが できる。2-3-1 Arduino Pro Mini
モデルロケットの分離機構を制御するマイコンボードは軽量かつ小型でなければならな い。よって、現行の Arduino マイコンボード中で最小の Arduino Pro Mini を採用することに した(図2-21、図 2-22)。搭載するマイコンは ATmega328P で動作は 3.3 V、8 MHz であ る。表2-3 にその仕様と図 2-22 に回路図をそれぞれ記載する。
図2-21 Arduino Pro Mini のサイズ 図 2-22 Arduino Pro Mini の外観
表2-3 Arduino Pro Mini
マイコン ATmaga328P 出力電流[mA] 150 モジュールサイズ[mm] 50×30 出力電圧[V] 3.3 電源電圧[V] DC 3.3~16 重量[g] 2 Aruduino Pro Mini
12
図2-23 Arduino Pro Mini 328 3.3V 8MHz の回路図[6]
2-3-2 MMA7361 加速度センサ
パラシュート自動開傘システムには、分離機構部が誤って地上で動作しないよう安全対 策として加速度センサを搭載する。加速度センサは軽量かつ小型のものが求められる。今 回採用したMMA7361 加速度センサは質量が 0.9 g ほどしかなく、サイズも小さいためモ デルロケット搭載に適している(図2-24)。表 2-4 に MMA7361 加速度センサの仕様を記 載する。 図2-24 MMA7361 加速度センサ13 表2-4 MMA7361 加速度センサの仕様
2-3-3 LPS331AP 気圧センサ
パラシュート自動開傘システムにおいて分離機構が動作する最終条件は、気圧値の変化 により判断させる仕様とした。このLPS331AP 気圧センサ(図 2-25)は世界最小の絶対圧 気圧センサであり、分解能も高精度を誇っている。高度わずかに数10 m 程度しかなくても 気圧差が判断でき、かつモデルロケット搭載に適していると判断し本センサを採用した。 表2-5 にその仕様を記載する。 図2-25 LPS331AP 気圧センサ[7] 表2-5 LPS331AP 気圧センサの仕様 センサ Freescale MMA7361L 消費電力[μ A] 400 軸数 3軸(X・Y・Z) モジュールサイズ[mm] 約10×10 検出範囲[G] ±1.5または±6 周波数応答[Hz] DC~1500 感度[mV/G] 800(±1.5G レンジ 3.3V動作時) 206(±6G レンジ 3.3V動作時) ノイズ[μ G/√Hz] 350(0.1Hz ~1000Hz) 電源電圧[V] DC 2.2~3.6 重量[g] 0.9 MMA7361 3軸加速度センサ センサ STマイクロエレクトニクスLP331AP 電源電圧(コア)[V] DC 1.71~3.6 測定範囲[hPa] 260~1260 消費電力[μ A] 5.5(通常) ノイズ[hPa] 0.02 動作温度範囲[℃] -40~+80 精度[hpa] ±0.1(typ)±0.2(max)ta=25℃±2 (typ)-3.2~+2.6(max)ta=0~80℃ モジュールサイズ[mm] 13×10 出力レート[Hz] 1~25 過圧耐性[hPa] 20000 インターフェース SPIまたはI2C 重量[g] 1.1 LPS331AP気圧センサ14
2-3-4 CR2032 ボタン電池
モデルロケット搭載機器予備試験用にマイコンやセンサの電源としてボタン電池(図 2-26、図 2-27)を採用した。乾電池などと比べても軽量で小型化ができる可能性があるた めこちらを利用し、単体の起電力は3.0 V のため2個直列に使用する。以下にその仕様を記 載する。 図2-26 CR2032 図 2-27 ボタン電池ソケット 表2-6 CR2032 ボタン電池の仕様2-3-5 MicroSD カードスロット
加速度センサと気圧センサのデータロガーとしてMicroSD カードにデータを記録するこ とにした。MicroSD カードスロットをブレッドボードやユニバーサル基板に取り付けられ るようにするセット品(図2-28)を購入し、SD カードに対して簡単に読み書きができるよ うにした。SD カードの動作電圧は 2.7 V~3.6 V であり、Arduino Pro Mini から直接この 電圧を出力できる。Chemical System Lithium-Manganese Dioxide Standard Capasity[mAh] 210 Nominal Voltage[V] 3 Approximate Weigth[g] 3.1 CR2032ボタン電池
15 図2-28 MicroSD カードスロット(秋月電子通商)
2-3-6 リポバッテリー
予備試験用ではボタン電池を電源としたが、ニクロム線で水糸を焼き切ることには不適 合なため、リポバッテリー KYPOM K6 3.7 V 360 mA(図 2-29)に変更した。本試験では このリポバッテリーを使用することにする。表2-7 に仕様を記載する。 図2-29 リポバッテリーKYPOM K6 3.7 V 360 mA 35C-70C 表2-7 リポバッテリー KYPOM K6 3.7 V 360 mA 35C-70C の仕様 サイズ[mm] 53×30×6 連続放電[A] 12.6 重さ[g] 14 瞬間最大放電[A] 25.2 出力電圧[V] 3.7 セルパック 1S1P キャパシティ[mAh] 360 リポバッテリー KYPOM K616
2-3-7 開発した搭載機器部
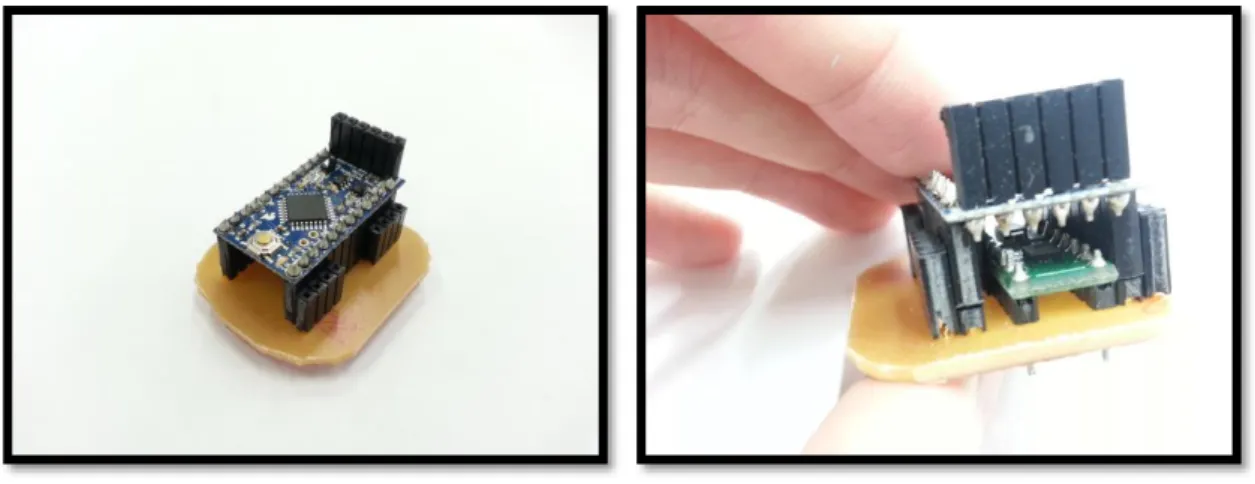
モデルロケットに搭載できるサイズにするために、図 2-30 のようにピンソケットで Arduino Pro Mini とユニバーサル基盤に空間を作り、その間に加速度センサと気圧センサ を収納する設計とし、内径5 mm の収納筒に収まるよう小型化に成功した。大きさ 60 mm ×50 mm×30 mm、質量 14.49 g となった。開発した制御機器部を図 2-30、図 2-31 に示す。 基板の角をとり収納できるよう工夫した。
図2-30 Arduino Pro Mini 図 2-31 Arduino Pro Mini とユニバーサ ル基盤の間の様子
また、リポバッテリーからArduino Pro Mini への安定的な電源確保及び、分離機構のニ クロム線に短時間に電流を流すことを両立させるためにフォトカプラ「TLP621-2」と MOSFET「IRFW/I540A」を利用して回路を設計した。基板の大きさは 40 mm×30 mm、 質量15.58 g である。
17
第三章 性能試験
3-1 性能試験概要
性能試験は予備試験と本試験から成り、予備試験はモデルロケット搭載機器試験、分離 機構地上試験を行う。本試験では開発したパラシュート自動開傘システムを搭載し、パラ シュートによって安全・確実に回収できるのか、その性能を試験する。それぞれの試験方 法は3-2、3-3 にて説明する。本試験ではモデルロケットに質量を抑えるため MicroSD カー ドを搭載せずに行う。 また、モデルロケットのパラシュートは通常エンジン延時薬からの逆噴射圧力によりノ ーズコーン方向に押し出されて展開するが、予備試験は分離機構が無いためそれを利用し、 本試験ではエンジンからの逆噴射を利用せずに無火薬式で分離機構を動作させ、パラシュ ートを展開させる。 さらに安全対策として日本モデルロケット協会自主消費基準及び、モデルロケット安全 コードに則り、グラウンド内は作業者以外原則立ち入り禁止とし、モデルロケット発射台 より半径60 m以内を打上げ関係者以外立入り禁止区域とした(図 3-2 参照)。 図3-1 打ち上げ場所の相互位置図18 図3-2 打ち上げ場所付近の見取り図 ※注 ●内がモデルロケット打上時、点火操作者及び、待機者以外立ち入り禁止。 ●内が危険区域(半径60 m以上で打上げ関係者以外立入り禁止区域)とする。 ■が本部(火気取扱所)とする。 また、打上げ日当日の風向によって本部の場所等を風上に変更する場合があるが、 火薬類取締法施行規則第56 条の 3 の 2 の消費基準並びに、日本モデルロケット協会 の自主消費基準に基づいて行うものとする。
19
3-2 予備試験の方法
モデルロケット搭載機器試験の方法は、ロケット上昇中の過酷な環境下で打ち上げの衝 撃や様々な振動に耐えることができるのか、パラシュート分離機構は搭載せずに同等質量 を搭載して打ち上げ、機器性能を試験することが目的である。また分離機構地上試験では、 気圧値を実験室の気圧よりも低く設定し、気圧値による分離機構の動作を無視した状態で 垂直方向の加速度を感知すると機構のニクロム線に電流が流れるようにした。これによっ て、開発した分離機構部が制御機器部と連動してニクロム線に電流が流れるかを確認する。 図3-3 のように加速度センサを搭載する際は、地面に対する垂直上方向が Z 軸正方向と設 定しロケット機軸とした。 図3-3 加速度の軸方向3-2-1 第1回モデルロケット搭載機器試験
第1回目の予備試験は平成26 年 12 月 19 日午前 10 時 48 分に高知工科大学グラウンド 内にて打ち上げを行った。試験方法は製作した予備試験用モデルロケットの上部にセンサ などの機器を搭載し、打ち上げを行う。設計したモデルロケット及びフライトシミュレー ションの結果を図3-4、図 3-5 に記載する。20
図3-4 第1回予備試験モデルロケットの設計図
21 この飛行シミュレーションから最大高度が86.8 m、最大加速度(垂直方向)が 114 m/s² (約11.6 G)という結果になった。図 3-6 および表 3-1 に製作したモデルロケットの外観とそ の性能表を記載する。 図3-6 製作したモデルロケット 表3-1 モデルロケットの性能表 搭載機器は、図3-7 のように内径 5 cm のモデルロケットのボディに対して外径 4.9 cm の筒に収納した。この筒の下には不燃紙とパラシュートが収納されており、図3-8 のように 筒は写真の位置で静止する。この筒の底をバルサ材で塞ぎ、Arduino Pro Mini を底辺に設 置し左右にボタン電池、中央にMicroSD ロガーを配置した。以下に搭載機器と質量の表を 記載する。
図3-7 筒の底辺に設置した Arduino Pro Mini 図 3-8 筒に収納した搭載機器部
長さ[mm] 525 最大高度[m] 86.8 最大外形[mm] 54 最大速度[m/s] 42.2 エンジン込質量[g] 176 最大加速度[m/s²] 114 安定性 1.48
22 表3-2 搭載機器部の質量表 予備試験当日は快晴であった。図3-9、表 3-3 に当日の状況と気象条件を記載する。 図3-9 打ち上げ場の様子 表3-3 当日の気象条件
3-2-2 第2回モデルロケット搭載機器試験
第2回予備試験は、平成26 年 12 月 22 日午前 11 時 22 分に高知工科大学グラウンドに て打ち上げを行った。前回からの改善点として搭載機器部のマイコンを打ち上げ時の衝撃 で動かないように固定し、さらにモデルロケット全長を約10 cm 小型化した(図 3-12、図 3-13)。またエンジン部に 50 g のおもりを追加しロケットの安定性を求めた。全質量は 173 g で第1回からほぼ変わっていない。設計したモデルロケット及びフライトシミュレーショ ンの結果を図3-10、図 3-11 に記載する。 予備試験搭載センサ 質量[g] ボタン電池 12.09 加速度センサ 0.9 気圧センサ 1.2 MicroSDロガー 7.52 Arduino Pro Mini 5.17天気 晴れ 気温 5℃前後 湿度 50%前後 風速 3~4[m/s] 風向 西 気象条件 (平成26年12月 19日午前10時)
23
図3-10 第2回予備試験モデルロケット設計図
24 図3-12 左からノーズコーン、 図 3-13 製作したモデルロケット ボディ、搭載機器 表3-4 モデルロケットの性能表 第2回予備試験当日は快晴で風が瞬間的に強く感じる時があった。図3-14、表 3-5 にそ の気象条件を記載する。 図3-14 打ち上げ場の様子 長さ[mm] 425 最大高度[m] 89.5 最大外形[mm] 54 最大速度[m/s] 43 エンジン込質量[g] 173 最大加速度[m/s²] 116 安定性 1.05 モデルロケットの性能
25 表3-5 当日の気象条件
3-2-3 分離機構地上試験
開発した制御機器部と分離機構部をワニ口クリップで挟んだニクロム線で図3-15 のよう に固定し、実験を行った。ワニ口クリップの先にはニクロム線と制御機器部がつながって いる。1 段目には制御機器部とノーズコーン質量分に見立てた粘土(質量 50 g)を設置した。 図3-15、図 3-16 に実験の様子を示す。 図3-15 万力で固定した分離機構部 図 3-16 ワニ口クリップを設置した様子3-3 本試験
3-3-1 第1回本試験
第1回本試験は平成27 年2月1日午後 16 時 10 分に高知工科大学グラウンドにて行い、 パラシュート自動開傘システムを搭載したモデルロケットを打ち上げ、その性能評価を行 った。モデルロケット搭載機器予備試験の実験結果から、Arduino Pro Mini の基板を図 3-17 のように固定しモデルロケット打ち上げ後に質量バランスを崩さないように改善した。設 計したモデルロケット及びフライトシミュレーションの結果を図3-18、図 3-19 に、表 3-6 にモデルロケット性能表を記載する。 天気 晴れ 気温 7℃前後 湿度 30%前後 風速 6[m/s] 風向 西~南西 気象条件(平成26年12月 22日午前11時)26
図3-17 Arduino Pro Mini の固定方法
27 図3-19 フライトシミュレーション 表3-6 モデルロケットの性能表 モデルロケットに搭載した分離機構部及び制御機器部の配置図と質量配分表を図 3-20、 表3-7 に示す。 図3-20 モデルロケット搭載機器の配置図 長さ[mm] 400 最大高度[m] 52.2 最大外形[mm] 54 最大速度[m/s] 29.8 エンジン込質量[g] 286 最大加速度[m/s²] 82.4 安定性 1.08 モデルロケットの性能
28 表3-7 質量配分表 実験当日は快晴であったが時折突風が吹いていた。図 3-21、表 3-8 に打ち上げ会場の様 子と気象条件を示す。 図3-21 打ち上げ場の様子 表3-8 当日の気象条件
3-3-2 第2回本試験
第2回本試験は平成27 年2月3日午後 15 時 20 分に高知工科大学グラウンドにて行い、 パラシュート自動開傘システムを搭載したモデルロケットを打ち上げ、性能評価をする。 設計したモデルロケット及びフライトシミュレーションの結果と性能表を図3-22、図 3-23、 表3-9 に記載する。 部品名 質量[g] 部品名 質量[g] ノーズコーン 2.33 分離機構部 64.29 ボディ 88.43 エンジン 32.2 搭載機器部 55.66 調整用おもり 50 質量配分表 天気 晴れ 気温 10℃前後 湿度 30%前後 風速 3~4[m/s] 風向 南西 気象条件(平成27年2月1日 午後16時)29
図3-22 第2回本試験用モデルロケットの設計図
30 表3-9 モデルロケットの性能表 飛翔安定性の向上のため前回からの変更点として、分離する位置をノーズコーンからロ ケットボディの中間位置へ変更した。図3-24、図 3-25 にその配置図と分離イメージ図を示 す。この変更によって前回の問題点であったノーズコーンの不安定な固定が解消され、ロ ケット機体が分離されたと同時にパラシュートの紐が引っ張られて外へ出される仕様にし た。表3-10 に使用するモデルロケットの質量配分表を示す。 図3-24 モデルロケット搭載機器の配置図 長さ[mm] 400 最大高度[m] 52.3 最大外形[mm] 54 最大速度[m/s] 29.9 エンジン込質量[g] 236 最大加速度[m/s²] 82.4 安定性 1.02 モデルロケットの性能
31 図3-25 分離のイメージ 表3-10 質量配分表 また、図3-26、表 3-11 に打ち上げ場の様子と当日の気象条件を示す。 図3-26 打ち上げ場の様子 部品名 質量[g] 部品名 質量[g] ノーズコーン 2.33 分離機構部 64.29 ボディ 88.43 エンジン 32.2 搭載機器部 55.66 調整用おもり 0 質量配分表
32 表3-11 当日の気象条件
3-3-3 第 3 回本試験
第3 回本試験は平成 27 年 2 月 6 日 16 時に高知工科大学グラウンドにて行った。前回の 実験で製作したモデルロケットは再使用不可に破損してしまい、今回は予備用に製作して いたロケットを使用した。また、万が一モデルロケットが想定高度の気圧値まで到達でき なかった場合に備え、発射時に生じた加速度を感知してから3秒後には気圧値に関わらず 分離させる仕様とした。設計したモデルロケット及びフライトシミュレーションの結果と 性能表を図3-27、図 3-28、表 3-12 に記載する。 図3-27 第3回本試験用モデルロケットの設計図 天気 晴れ 気温 10℃前後 湿度 50%前後 風速 6[m/s] 風向 北 気象条件(平成27年2月3日 午後15時)33 図3-28 フライトシミュレーション 表3-12 モデルロケットの性能表 モデルロケットの分離位置の変更はなく、搭載機器の配置図3-24 と同等である。ロケッ トの質量配分表を表3-13 に示す。 表3-13 質量配分表 実験当日は北からの風が強く吹いており、天候は快晴である。図3-29、表 3-14 に打ち上 げ場の様子と気象条件を示す。 長さ[mm] 400 最大高度[m] 40.3 最大外形[mm] 54 最大速度[m/s] 25.2 エンジン込質量[g] 105 最大加速度[m/s²] 70.3 安定性 1.02 モデルロケットの性能 部品名 質量[g] 部品名 質量[g] ノーズコーン 2.33 分離機構部 64.29 ボディ 71.72 エンジン 32.2 搭載機器部 55.66 調整用おもり 45 質量配分表
34 図3-29 打ち上げ場の様子 表3-14 当日の気象条件 天気 晴れ 気温 10℃前後 湿度 50%前後 風速 5[m/s] 風向 北北西 気象条件(平成27年2月6日 16時)
35
第四章 試験結果
4-1 予備試験結果
モデルロケット搭載機器の第1回試験では、ロケット発射後すぐに姿勢が横方向に崩れ、 パラシュートが開く前に地面に墜落した。地面衝突から約2秒後にエンジンからの逆噴射 により、パラシュートがロケットから放出された。搭載機器に被害はなく、加速度と気圧 データの取得に成功した。飛行時間は約3 秒、最高高度は約 6 m と推定される。 モデルロケット搭載機器の第2回試験では、ロケット発射直後は垂直に飛び、すぐに垂 直方向に2回転しパラシュートが放出される前に地面へ衝突した。こちらも地面衝突から 約2秒後にエンジンからの逆噴射によりパラシュートがロケットから放出されたのを確認 できた。搭載機器に破損などは無かった。また、1回目と同じく加速度と気圧データの取 得に成功した。飛行時間は約5 秒、最高高度は約 16 m と推定される。図 4-1~図 4-4 にそ れぞれの加速度と気圧の推移を示す。 図4-1 モデルロケット搭載機器第1回予備試験における加速度の推移36 図4-2 モデルロケット搭載機器第1回試験における気圧の推移 図4-1 に示すように、モデルロケットに搭載した加速度計3成分の値から、発射後約 1 秒後にエンジンによる燃焼が終わり、燃焼終了後約2.4 秒後にパラシュート放出用の逆噴射 によるZ 軸方向の加速度が検出されたことがわかる。垂直(Z 軸)方向加速度のピークはロ ケット発射0.2 秒後に最大 46.8 m/s²だった。また、図 4-2 の気圧の推移からロケット上昇 による気圧の変化が確認できる。 図4-3 モデルロケット搭載機器試験2回目加速度の推移
37 図4-4 モデルロケット搭載機器試験1回目気圧の推移 図4-3 からモデルロケットに搭載した加速度の値より、発射後約 1 秒後にエンジンによ る燃焼が終わり、燃焼終了後の約3秒後にパラシュート放出用の逆噴射によるZ 軸方向の 加速度が検出されたことがわかる。垂直方向加速度のピークはロケット発射0.3 秒後に最大 28 m/s²だった。また、図 4-4 の気圧の推移からロケット上昇による気圧の変化が確認でき る。
38
4-2 分離機構地上試験結果
ビデオ記録コマ送りで得た連続写真(図4-5)のに示すように、加速度センサに加速度を 与えてから約0.5 秒後にニクロム線に電流が流れ、バネが開放されていく様子がわかる。そ の後、質量50 g の粘土のおもりが約 5 cm まで跳ね上がったことを確認した(表 4-1 参照)。 図4-5 0.25 秒毎の様子(左上から順に右方向への時間発展) 表4-1 地上試験の評価項目と結果 評価項目/実験回数 1回目 2回目 3回目 動作 ○ ○ ○ 跳ねあがった高さ 約 3 cm 約 10 cm 約 5 cm39
4-3 本試験結果
本試験結果を表4-2 に示す。 表4-2 本試験の評価項目と結果 本試験1 回目ではモデルロケット発射後、図 4-6 のように横へ傾き、設定した気圧条件 となる高度に到達せずに墜落した。分離機構部の1 段目と 2 段目が破損したが制御機器部 の破損は無く、機体の再使用は可能である。動画解析から、飛行時間は約3 秒、最高高度 は約6 m と推定される。図 4-6、図 4-7 に発射前後のモデルロケット、また図 4-8 に打ち上 げの様子を示す。 図4-6 発射直後のモデルロケット 図 4-7 地面衝突後のロケット上段部 評価項目/実験回数 1回目 2回目 3回目 打ち上げ △ ○ △ 分離 × × × パラシュート展開 × × × 安全に回収 × × × 最高高度[m] 5 25 8 非常用タイマー回路 なし なし あり 天気 晴れ 晴れ 晴れ 風速[m/s] 3~4 6 5 条件 気象状況40 図4-8 第1回本試験 0.33 秒毎の打ち上げの様子(左上から順に右方向への時間発展) 本試験2 回目では、発射後に安定飛行して順調に上昇し比較的良好な弾道を描いた。し かし、機体が分離されなかったためパラシュートは展開されず、自由落下により地面へ垂 直に激突した。マイコン・センサ基板、電源基板、リポバッテリー、機体、フィン、ノー ズコーンが破損し、この機体と制御機器は繰り返し使用不可になった。飛行時間は約6 秒、 最高高度は約29 m と推定される。図 4-9、図 4-10 に発射前後のモデルロケット、また図 4-11 に打ち上げの様子を示す。 図4-9 発射直後のモデルロケット 図 4-10 地面衝突後のモデルロケット
41 図4-11 第2回本試験 0.66 秒毎の打ち上げの様子(左上から順に右方向への時間発展) 本試験3回目では、発射台を離れた直後に水平方向へ傾き、想定高度に到達せずに地面 へ落下した。破損個所はノーズコーンのみで、機体の再使用は可能である。飛行時間は約 4秒、最高高度は約7 m と推定される。図 4-12、図 4-13 に発射前後のモデルロケット、ま た図4-14 に打ち上げの様子を示す。
42
図4-12 発射直後のモデルロケット 図 4-13 地面衝突後のモデルロケット
43
第五章 考察および評価
5-1 考察
5-1-1 予備試験についての考察
予備試験結果から搭載機器はロケット発射時及び、地面衝突時の衝撃に耐えることがで きるとわかった。しかし、どちらもロケット発射後すぐに墜落したため、想定の高度まで 達しておらず、生じた加速度は想定の半分の最大46.8 m/s²(4.77 G)であり、シミュレー ション予測値の約115 m/s²(11.73 G)の加速度に搭載機器が耐えることができるかは不明 である。また、2回の試験で打ち上げ後すぐにロケットが墜落した原因として、1 つ目には マイコンやセンサなどの搭載機器がロケットの振動により機体内部で動いて偏移、ロケッ トの飛行姿勢に影響を与えていた可能性が挙げられる。耐衝撃性を考えつつも搭載機器が 動かぬように柔軟に固定させることが重要であり、安定飛行できるよう更なる改良が必要 である。2つ目にロケットの重心と圧力中心の関係がネガティブになっていた可能性があ る。打ち上げの動画を解析した結果、発射台を離れた直後に縦方向へ回転しており、これ は静安定性がない設計のロケットに多く見られる現象である。現在の搭載機器の位置はノ ーズコーンの下にあり、設計およびシミュレーションに対して実機の重心が上部に行き過 ぎた可能性がある。そのため、エンジン付近に重心調節用のおもりを設置し、重心の位置 をロケット中心まで移動させなければならない。以上の2点を改善し、本機器を搭載した モデルロケットの安定飛行を実現させたいと考える。5-1-2 分離機構地上試験についての考察
地上試験の結果から、分離機構はモデルロケットに搭載することができると判断した。 しかし、地上実験は気圧値の変化を無視する設定で行われたため、実際に上空での動作を 確認できていない。そのため、ある程度高さのある場所から分離機構を投げ上げる実験を 行おうと考えたが、安全に実験が行える場所が存在しなかったため、投げ上げ試験なしで の本試験となった。試験用にピストン付密封容器などを製作すれば任圧条件を実験室内で 模擬できる可能性はある。5-1-3 本試験についての考察
1回目のロケット打ち上げで想定高度まで上昇せずに墜落した原因として、まず重心の 位置が上部にあった可能性がある。分離機構部の位置がノーズコーンの下にあり、それを うけてエンジン付近におもりを設置した。打ち上げの動画を解析すると予備試験の際に見 られた縦方向の回転がなくなり、重心と圧力中心の関係がニュートラルまたはポジティブ な状態であったと考えることができる。しかし、仮にポジティブな状態であっても重心が 上部にあった場合、実験結果のような現象が見られる。次に機体製造に対する検討不十分 を挙げることができる。特にノーズコーンの固定方法が摩擦力により機体に被せているだ44 けの状態であり、ロケット上昇中の動圧で簡単に軸ずれを起こし軌道が曲がった可能性が 高い。さらに当日の気象条件は、上述の2つの原因に加えて風速3~4 m/s で、時折6 m/s 程の風が吹く中での試験となった。機体の検討不十分から微妙に姿勢が崩れ、さらに強風 の影響に対して安定飛行ができず墜落したのではないかと考える。これらのことから、重 心をさらにロケット中心へ移動させ、ノーズコーンの固定方法も検討した。 2回目の試験では1回目の失敗の原因を修復し、真っ直ぐに打ち上げることができた。 しかしロケットは想定高度まで上昇せず、機構は動作しなかった。これは制御プログラム 側に問題があり、フライトシミュレーションでは想定高度52 m に対して今回実験での気圧 設定値を30 m 付近の気圧と低めの高度に設定していた。しかし、実際は低めに設定してい た高度よりも低い高度(約29 m)しか打ち上げることができなかったため、機構が動作し なかったと考える。このことを踏まえ、制御プログラムには上昇による加速度を感知して から3秒後に強制的にニクロム線に電流が流れる仕組みを追加した。ここで3秒という値 はこれまで失敗したロケット打ち上げ動画の解析より、発射から3秒後は空中にあると予 想することができ、この値を設定した(図5-1 参照)。 図5-1 制御機器部のフローチャート
45 3回目の実験では加速度を感知してから3秒後に強制的にニクロム線へ電流を流す制御 も動作せずに墜落した。これはプログラムが原因でありこの問題点を早急に解決し、追加 の地上試験にて動作を確認するべきである。また、ロケットが想定高度まで上昇しなかっ た原因として発射台が挙げられる。ロケット機体脇のストローまたは発射台の鉄棒のどち らかが曲がっていたために、その間に摩擦力が生じて鉄棒を離れた瞬間に軌道がずれてし まった可能性がと考えられる。また、重心の位置についてロケットを平面の2次元として 今まで決定していたがロケットを立体的に、つまり3次元的に重心の位置を決定していな かったため、重心が上下左右・手前奥側のいずれかに偏って微小モーメントが発生してい た可能性がある。これらのことから、原因を解決していくために発射台の改良が必要であ り、ロケットが真上に飛ぶように例えば地面に垂直に3本のパイプのような棒状の補助レ ールを機体の大きさに合わせて設置できる設備を製作していくことにする。さらに3次元 的に重心の位置を決定するために、ターンテーブル等を用いたスピン試験により制御機器 を機軸に対して厳密に均等となるよう設置しなければならないと考える。特にリポバッテ リーは機体の円筒内では固定されておらず、これの固定方法を検討したいと思う。
5-2 性能評価
今回開発したパラシュート自動開傘システムは、現状ではロケットの製造時の工作精度 の悪さなどの影響で十分上昇せず気圧が設定値よりも低くならなかったため、プログラム にタイマー設定が必要な状況である。よって、まだ1度もロケットに搭載した状態でセン サ信号の連動に基づいた分離機構の動作は確認できていないため、今後は地上試験および 改良したモデルロケットの打ち上げを行い、最終的な性能評価を進めるべきである。5-3 課題
今後の課題としてまず、ロケットの重心位置を正確に3次元的に配置して搭載物をすべ て固定することである。具体的には制御機器部の左右対称な質量配分ができるよう、新た な設置・固定方法を模索する必要がある。また、現在は加速度センサを安全対策として利 用しているだけだが、将来的には今回のようにロケットが予期せぬ軌道を進んだ場合に備 え、加速度センサおよびジャイロセンサなどでロケットの姿勢を把握し、墜落の危険性が ある場合に分離機構が動作するようなシステムを取り入れられれば、更なる安全性の向上 につながると考えられ、センサの小型化が実現している現在、これはモデルロケットでも 検証可能と言える。46
第六章 結論
本研究では、小型飛翔体向けパラシュート自動開傘システムを試作した。実験には加速 度センサと気圧センサを使用し、地上試験では連動させて分離機構を動作させることに成 功した。本来であればモデルロケットの打ち上げによってこの性能を評価しなければなら ないがロケットの製造において検討不十分な箇所による問題が露呈したため、本研究では 期間内に正常な状態での搭載機器打ち上げ実験を行うことができなかった。しかし、本研 究により、小型飛翔体向けパラシュート自動開傘システムの基礎部分を構築でき、小型マ イコンおよびセンサを用いた超小型・軽量の制御機器搭載についての開発可能性を示すこ とができた。47
謝辞
研究や論文執筆にあたり、指導教員であり、いつも丁寧なご指導やアドバイスを賜りま した高知工科大学システム工学群山本真行教授に心から感謝いたします。 また、日ごろから知識や意見を示唆して頂いた柿並義宏助教をはじめ、本研究の実験、 回路製作、論文作成にあたり貴重な意見や知識を頂いた山本研究室大学院生の木原さん、 河野さん、池原さん、山崎さん、同輩の枝本さん、水本さん、小田さん、後輩の平塚さん に心より感謝いたします。ありがとうございました。48
参考文献
[1]WIRED、アマチュアグループの開発した宇宙ロケットが発射準備完了、2014 年 12 月参 照 http://wired.jp/2002/08/29/%E3%82%A2%E3%83%9E%E3%83%81%E3%83%A5%E3%8 2%A2%E3%82%B0%E3%83%AB%E3%83%BC%E3%83%97%E3%81%AE%E9%96%8B %E7%99%BA%E3%81%97%E3%81%9F%E5%AE%87%E5%AE%99%E3%83%AD%E3% 82%B1%E3%83%83%E3%83%88%E3%81%8C%E7%99%BA/ [2]モノタロウ、蛍光水糸の販売特集、2015 年 2 月参照 http://www.monotaro.com/k/store/%8Cu%8C%F5%90%85%8E%85/ [3]amazon、ELPA ニクロム線、2015 年 2 月参照 http://www.amazon.co.jp/ELPA-HK-NK05H-%E3%83%8B%E3%82%AF%E3%83%AD% E3%83%A0%E7%B7%9A-5m/dp/B00288GIYE [4] OpenRocket、2014 年 10 月参照 http://openrocket.sourceforge.net/ [5]NASA、ロケットの重心と圧力中心、2014 年 12 月参照 http://exploration.grc.nasa.gov/education/rocket/rktstab.html [6] sparkfun、2014 年 10 月参照 https://www.sparkfun.com/products/11114 [7] Strawberry Linux、2014 年 10 月参照 https://strawberry-linux.com/catalog/items?code=12113 Web ページ・論文 ・高崎高校、SSH、モデルロケットを用いた物理的検証、2014 年 12 月参照 http://www.takasaki-hs.gsn.ed.jp/ssh/research/report/h17report-research-6.pdf ・Arduino 日本語リファレンス、2014 年 10 月参照 http://www.musashinodenpa.com/arduino/ref/ ・SPACE-DEVICE 株式会社、モデルロケット解説、2014 年 10 月参照 http://www.space-device.com/rocket.html ・ke!san、気圧から標高を計算、2014 年 11 月参照 http://keisan.casio.jp/has10/SpecExec.cgi?id=system/2006/1257609530 ・東海大学チャレンジセンター、TSRP、2014 年 10 月参照 http://www.ea.u-tokai.ac.jp/srp/index.html ・北海道工業大学、山下・吉田、ハイブリッドロケットの回収方法に関する研究、2014 年 10 月参照 http://www1.hus.ac.jp/~satori/labo/ronbun/h13-2.pdf49 ・吉田昌史、本間直彦他、柔構造エアロシェルカプセルの膜面カバー展開機構、および分 離射出機構の開発、平成23 年度宇宙航行の力学シンポジウム、2014 年 10 月参照 http://gd.isas.jaxa.jp/~kzyamada/MAAC/2011/publication/2011_1220_Koko(Yoshida).pdf ・国土交通省、計算式集160 ページ目 2.1.2、気圧、気温を求める計算、2015 年 1 月参照 http://www.mlit.go.jp/crd/city/sigaiti/materials/sokuryou/furoku6.pdf ・岡原卓矢、鈴木秀明他、第19 回衛星設計コンテスト設計の部、衛星設計解析書 16 ペー ジ目2.12、衛星分離機構、2015 年 1 月参照 http://www.satcon.jp/history/prize19/pdf/19_01.pdf ・日本モデルロケット協会、2014 年 10 月参照 http://www.ja-r.net/index.html
50
付録
・製作した回路図
![図 2-23 Arduino Pro Mini 328 3.3V 8MHz の回路図[6]](https://thumb-ap.123doks.com/thumbv2/123deta/6797908.726572/15.892.136.768.156.627/図223ArduinoProMini32833V8MHzの回路図6.webp)

![図 3-7 筒の底辺に設置した Arduino Pro Mini 図 3-8 筒に収納した搭載機器部 長さ[mm]525 最大高度[m]86.8](https://thumb-ap.123doks.com/thumbv2/123deta/6797908.726572/24.892.190.695.181.673/図7筒底辺設置Arduino収納した搭載機器部長さmm525最大高度m86.webp)




