論 文
スペクトラム拡散による音を用いたデータ伝送機能を具備する
高精度屋内測位手法の提案と検証
門倉
丈
*, 森下
航平
**, 五百蔵 重典
*,**, 田中 博
*,**a)Proposal and Verification of High Accuracy Indoor Positioning Implemented
Data Transmission Function using Sound by Spread Spectrum
Takeru KADOKURA
*,
Kohei MORISHITA
**,
Shigenori IOROI
*,**,
Hiroshi TANAKA
*,**a)あらまし 筆者らはこれまで音波を用いて,数cm の測位誤差に抑えられる高精度な屋内測位システムを開発してきた.音波は電波と同 じ波であり,電波と同じように変調することによって,センサデータなどの伝送が可能である.本論文では,複数の音源(ユーザ端末)の測 位機能と個別のデータ伝送機能を同一構成で共存させる方法を提案する.音源をスペクトル拡散して送信する前に,センサデータを用 いて一次変調する.受信側では,拡散信号の相関処理によって受信タイミングを算出し,測位計算を行うとともに,逆拡散,復調処理に よってデータを取り出す.受信処理のソフトウェア設計と実装とともに送信機を開発し,実験系を構築した.そして,静音,騒音環境下での 特性実験を行い,測位機能,データ伝送機能を確認するとともにその特性を評価し,提案した手法の妥当性を示す.
Abstract The authors have developed an accurate indoor positioning system with an error of just a few cm by using sound. It is possible to a realize data transmission function since the sound wave is the same as the radio wave. This paper presents the method and a new system that achieves both positioning of plural sound sources (user terminals) and data transmission from each sound source using the same configuration. The sound source is modulated based on sensor data before the spread spectrum process. On the receiving side, the positioning calculation is carried out by using the timing of the reception, which is obtained by correlation calculation, and data extraction is conducted by inverse diffusion and demodulation of the received signal. Software design, development and implementation were conducted for the reception operation, and a sound transmitter was developed to complete the experimental system. System performance was evaluated with experiments carried out in both quiet and noisy environments, and the results established the validity of the proposed methods.
キーワード 屋内測位, スペクトラム拡散, 音波, 測位精度, データ伝送, 拡散率
Keyword Indoor positioning, Spread spectrum, Sound wave, Positioning accuracy, Data transmission, Diffusion rate
1. まえがき 位置情報の必要性とその重要性は,屋外,屋内という条 件に限らず,もはや論を俟たないと思われる.屋外の位置 情報については,GPS/GNSS とその受信機が広く普及し, 多くのシステムやサービスが提供され容易に取得できる. そして,さらに高精度化を実現するためのシステムも提供 されつつある[1]. 一方,屋内の位置情報についても,従来よりその取得方 法として多くのものが提案,実証されている[2].屋内は, 通路の幅,入り口の幅や搬送車両の自動走行などを考慮し たとき,屋外より高い精度が要求される場合がある.この ため,次章で述べるように,音波を用いた高精度な屋内測 位システムの開発の事例が多々ある.音波は電波と比較し て,使用する周波数によっては人に音として聞こえること や,到達距離が小さいというデメリットがあるが,伝搬速 度が小さいため高精度なタイミング検出が不要であるこ と,マルチパスの影響を排除しやすいというメリットがあ るため,高精度な屋内測位の実現には有利である.また, 電波法の制約がない,という点も開発や利用に有利である. 筆者らはこれらの音波を用いることの利点を踏まえ,超 音波を用いた屋内測位技術とシステムを開発した[3].こ の構成では,多数の音源(ユーザ端末)を識別,収容する ために赤外線を用い,システム側から赤外線ID 信号を発 信し,事前に付与したID が一致した音源が超音波を送信 する,という時分割多重方式を用いている.さらに,各超 音波受信機内のマイコンで受信タイミングを検出し,受信 機ID と受信タイミング情報のみを RS485 によるカスケー ド接続構成で測位計算PC に送信することにより,200 m2 程度の広域エリアへの拡張への容易性を実現した[4]. これらの検討の中で,超音波は特殊な装置を必要とする ことから普及の障壁が大きいと判断し,広く普及している スマートフォンを音源とした屋内測位システムを開発し た[5].スマートフォン本体への赤外線発信機などの追加 は基本的に困難であるため,音源の識別のためにスペクト ラム拡散技術を適用した.この技術を用いる場合相関計算 * 神奈川工科大学大学院 情報工学専攻 〒243-0292 神奈川県厚木市下荻野 1030
Course of Information and Computer Sciences, Graduate School of Kanagawa Institute of Technology, 1030 Shimo-ogino, Atsugi city, Kanagawa, 243-0292.
** 神奈川工科大学 情報学部 情報工学科 〒243-0292 神奈川県厚木市下荻野 1030
Department of Information and Computer Sciences, Kanagawa Institute of Technology, 1030 Shimo-ogino, Atsugi city, Kanagawa, 243-0292.
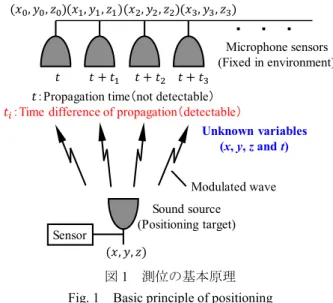
が必須であり,この演算負荷が大きいため測位の時間間隔 が大きくなる.したがって,この時間間隔の低減のために, 各受信機に相互相関処理を行う FPGA を実装して受信タ イミングを測位計算PC に送信する分散処理構成を実現し [6],実用性を高めてきた. 屋外の測位システムである GPS/GNSS では,測位信号 である電波に衛星の軌道データや測位の補正データなど が含められている[7].音波も電波と同様に波としての性 質があることから,測位機能とともにデータ伝送機能を具 備することが可能である.IoT 時代と呼ばれ,センサデー タなどを収集し,解析する要求が高まっている中で,測位 とデータ伝送機能を同一システムで実現することは大き な価値があると考えられる. 本論文では,測位に用いているスペクトル拡散音源に よってセンサなどのデータを伝送する方法を示し,ソフト トウェア実装の前にシミュレーションによってその方法 の妥当性を確認する.そして,測位機能とデータ伝送機能 の両機能を同一のハード構成で実現するシステムアーキ テクチャを示し,そのシステムを開発,構築する.そして, 音源数や利用環境を変えて,システムの性能である測位精 度,伝送品質とスペクトラム拡散における拡散率との関係 を実験的に検証し,開発システムの実利用が可能なことを 確認した結果を示す. 2. 関連研究 屋内測位に関しては,無線LAN や Bluetooth などの電波 を用いたものを含め,すでに多くの検討事例がある.電波 を用いた高精度な測位システムとして UWB によるもの がある.この方式では,各受信機間の電波の受信時間差か ら送信機の位置を求めるものであるが,測位精度は20 cm 程度が限界である[8].電波の出力レベルにもよるが,音波 を用いるものよりも伝搬範囲が広く設置する受信機の数 の観点からは有利であるが,受信タイミングの測位誤差へ の影響が大きく音波に比べて高精度化は難しいとい思わ れる. したがって現段階では,数 cm 程度の精度を確保できる 方法は,音波を用いたものやRFID などを稠密に配置した もの[9]に限定されると思われる.音波を用いた測位シス テムの多くは送受同期の構成を取るか,音波と電波との伝 搬時間差を用いたTOA(Time Of Arrival)方式である[10], [11], [12].このため同期のための構成,あるいは音波と電 波をともに受信する必要があり,システムが複雑になる欠 点がある.同期を用いない TDOA(Time Difference Of Arrival)もあるが,双曲線測位[13]という手法を適用して おり,位置算出の演算がやや複雑である.筆者らの提案シ ステムも逆GPS[14]と呼ばれる TDOA 方式であるが,測位 計算はほかの分野でも広く利用されている一般的な数値 計算法であるニュートン法を用いている. 音波の受信タイミング検出のために,スペクトラム拡散 と相関計算処理によって求めているものが多いが,スペク トラム拡散を利用したデータ伝送機能と結び付けて,測位 機能との両機能を具備した測位システムは,筆者らの知る 限り見当たらない.音を用いたデータ伝送については,変 調方式としてFSK,ASK,そしてスペクトラム拡散を用い たもの[15],80 bit/s までの伝送速度を実現するとともに伝 送品質と騒音の影響を評価したものもある[16].しかし, いずれも音によるデータ伝送という機能に特化したもの である. 音に情報を含ませ,音の到達する範囲内の端末(スマー トフォン)に情報を送信する方式もあるが[17],これは,測 位というよりも音の届く範囲内(数 cm~10 m 程度)での 受信者への来店クーポンの付与,情報送信というブロード キャスト通信であり,個々のセンサ情報送信につながるも のではない. 3. 測位とセンサデータ伝送の基本原理 3.1 測位の基本原理 本手法の測位とセンサデータ伝送 の基本原理を図1 に示す.音源から発生させた音を 4 つ以 上のマイクセンサで受信し,その伝搬時間差を用いて測位 対象の位置を求める.本システムでは送受信機間の時刻同 期をせず,受信機間の同期のみのため,簡単な構成で実現 可能である.一方,受信機同士では同期を確保しているた め,各マイクセンサ間の伝搬時間差は計測可能であり,以 下の式が成り立つ. ここで, 𝑡 :伝搬時間 [s] 𝑥, 𝑦, 𝑧 :送信機(音源)の位置 [m] 𝑡𝑖 :各マイクセンサへの伝搬時間差 [s] 図1 測位の基本原理 Fig. 1 Basic principle of positioning
√(𝑥 − 𝑥0)2+ (𝑦 − 𝑦0)2+ (𝑧 − 𝑧0)2= 𝑐𝑡 √(𝑥 − 𝑥1)2+ (𝑦 − 𝑦1)2+ (𝑧 − 𝑧1)2= 𝑐(𝑡 + 𝑡1) √(𝑥 − 𝑥2)2+ (𝑦 − 𝑦2)2+ (𝑧 − 𝑧2)2= 𝑐(𝑡 + 𝑡2) √(𝑥 − 𝑥3)2+ (𝑦 − 𝑦3)2+ (𝑧 − 𝑧3)2= 𝑐(𝑡 + 𝑡3) (1) (𝑥0, 𝑦0, 𝑧0)(𝑥1, 𝑦1, 𝑧1)(𝑥2, 𝑦2, 𝑧2)(𝑥3, 𝑦3, 𝑧3) 𝑡 𝑡 + 𝑡1 𝑡 + 𝑡2 𝑡 + 𝑡3 Sound source (Positioning target) (𝑥, 𝑦, 𝑧) Sensor Modulated wave Microphone sensors (Fixed in environment) 𝑡:Propagation time(not detectable)
𝑡𝑖:Time difference of propagation(detectable)
Unknown variables (x, y, z and t)
c :音速 [m/s] 𝑥𝑖, 𝑦𝑖, 𝑧𝑖 :各マイクセンサの設置位置 [m] である.送信機から音を最初に受信したマイクセンサへの 伝搬時間t と対象となる送信機の位置(x, y, z)は未知の値で ある.一方,各マイクセンサへの伝搬時間差は計測可能で あり,音速は室温から求められる.また,各マイクセンサ の設置位置は既知の値である.したがって,各マイクセン サへの伝搬時間差を計測し,式(1)の非線形連立方程式を 解くことにより,測位対象となる音源の位置が求められる. 3.2 センサデータ伝送の基本原理 センサデータ伝送のた めの基本原理を図2 に示す.送信側は,センサデータによ り音源データを一次変調する.その後拡散符号,ここでは M 系列符号を利用し,一次変調信号を拡散する(二次変調). 受信側は,信号を受信した後,レプリカ(音源データを送 信側と同じM 系列符号で拡散した信号)を用いて,受信信 号との相互相関を計算する.相関計算は受信タイミングを 検出するために行い,その値は,測位と同期(本論文では, 逆拡散の開始のタイミング決定を示す)に用いる.受信タ イミングを始点として,送信側と同じM 系列符号を用い て一次変調信号を取り出す逆拡散処理を行い,その後,音 源データを用いて復調処理しセンサデータを取り出す.な お,ここでは,一次変調に安定した伝送品質が期待できる BPSK(Binary Phase Shift Keying)を用いた.
3.3 センサデータ伝送シミュレーション 提案したセンサ データ伝送手法のソフトウェア実装の前に,その方法,手 順の確認として,MATLAB を用いてシミュレーションを 行った.シミュレーションはあくまで原理確認であること から,信号変化を容易に確認できるように拡散率を7(M 系 列次数3 次)に設定した.なお,拡散率 N は次式により定 義される. 𝑁 = 𝑇𝑏⁄𝑇𝑐 (2) ここで, 𝑇𝑏 :情報信号 1 bit の周期 [s] 𝑇𝑐 :拡散信号 1 チップの周期 [s] である.シミュレーションの結果を図3 に示す.音源周波 数は25 kHz とした.図中の最上部のグラフは送信するセ ンサデータであり最下部のグラフは今回用いる手法に よってセンサデータを取り出した結果である.ここで-1, 1 は 0,1 を意味している.音源はセンサデータ(0,1,・・・) を用いて一次変調し,さらにこの信号を1 周期 7 チップの M 系列符号(例えば,1,1,1,0,1,0,0)によって二次変 調する.ここで,センサデータ1 bit 区間に M 系列符号 1 周期を埋め込んでいる. 基本原理で述べたように,受信側では事前に生成してあ るレプリカを用いて相関計算を行う.相関値が最大となる タイミングが受信タイミングであり(図 3 の受信側の Correlation のグラフ),このタイミングから逆拡散を行う. Inverse diffusion のグラフはその結果である.この逆拡散の 結果は送信側の変調信号(Modulation のグラフ)と伝搬遅 延分だけずれたもので,信号は同じものである.そして, この逆拡散信号に対する復調処理(Demodulation のグラフ) によりセンサデータが得られるが,さらに,この復調結果 を M 系列符号の周期ごとに積算することで(Summation 図 2 センサデータ伝送の基本原理
Fig. 2 Basic principle of sensor data transmission
図 3 シミュレーション結果 Fig. 3 Simulation result
図4 受信側の構成 Fig. 4 Configuration of receiver side Amplifier #5 A/D Converter PC
A/D Conversion Signal
amplification
Conversion to ASCII code Demodulation Inverse diffusion Received timing detection
Summation Correlation Microphone sensor #5 Amplifier #1 Signal amplification Microphone sensor #1 ・・・ Positioning calculation Sensor data Sound source M sequence code Modulation Diffusion Transmitter Delay by distance Sound Correlation Sound
source M sequence code
Synchronization Replica Sensor data Inverse diffusion Demodulation Receiver Summation Sensor data Sound source Modulation M sequence code Diffusion Received signal Correlation Inverse diffusion Demodulation Summation (Sensor data) (Delay) Transmission Reception 1 sample 1 chip Peak of correlation 1 bit Period of sound source Period of M sequence code (7 chips)
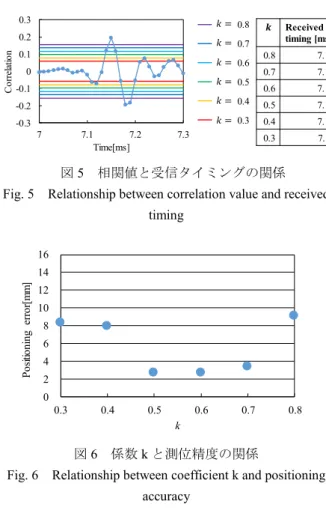
のグラフ),センサデータ伝送の信頼性を高めることがで きる(拡散利得).このシミュレーション結果により,手 法の妥当性を確認した. 4. 測位とセンサデータ伝送の処理手順 4.1 受信側の構成 受信機の構成を図 4 に示す.これは, シミュレーションに示した受信側を実装する際の処理構 成である. 式(1)より 4 点で測位は可能であるが,冗長系として 5 点 の受信機(マイクセンサ#1~#5)としている.ここで,受信 した信号は,接続するアンプにより増幅され A/D 変換器 へと送られる.A/D 変換器が出力した信号を PC に送信し た後,PC 内で相関計算,受信タイミング検出,測位計算, 逆拡散,復調,積算と最後にASCII コード変換を行い,測 位結果とセンサデータの取り出しを行う. 4.2 受信タイミングの検出 受信タイミングは,2 つの信号, すなわち送信データx と受信データ y の相互相関値 rxyが 最大になるタイミングであるが,そのピークの位置はマル チパスによる反射波の影響やM 系列 1 周期分のチップが 埋め込まれているセンサデータの1 bit によって+側,-側 への出現があるため,以下に示す係数k を考慮した閾値𝛼 を最初に越えたタイミングを受信タイミングとする. 𝛼 = 𝑚𝑎𝑥(|𝒓𝒙𝒚|) × 𝑘 (3) ここで, 𝒓𝒙𝒚 :相互相関値からなるベクトルデータ 𝑘 :閾値設定のための係数 である.測位計算のための受信タイミングと逆拡散開始の タイミングを決める閾値設定,すなわち式(3)における係 数𝑘の決定が高精度な測位と伝送品質の確保のために極め て重要となる.今回は事前実験の結果により,係数k を決 めることにした. 係数 k の変化による閾値設定とそれによる一つの受信 機での受信タイミング検出の関係を図 5 に示す.ここで は,実際に実験で得られた相関値(図中のプロット)を用い て,係数k を 0.8~0.3 まで 0.1 刻みで変化させたときの受 信タイミングを求めた.この結果から,係数k を変更する ことにより受信タイミングが変化することを確認した. 係数 k の設定により測位精度も変化することを確認す るため,各係数k のときの受信タイミングを用いて測位精 度を調べた.ここで測位精度は平面内のRMS(二乗平均平 方根)誤差であり,次の式により求めた. 𝑅𝑀𝑆 = √1 𝑛∑ (𝑥𝑖− 𝑥0)2+ (𝑦𝑖− 𝑦𝑜)2 𝑛 𝑖=𝑖 (4) ここで, 𝑛 :データ点数 𝑥𝑖, 𝑦𝑖 :測位結果位置 [mm] 𝑥0, 𝑦0 :音源設置位置 [mm] である. その結果を図6 に示す.係数 k の値によって,測位精度 に変化が確認できる.なお,この差異は伝送精度にも影響 する.本結果から係数k が 0.5 と 0.6 のときが,最も高い 測位精度を得ることができた.ここでは,k を低く設定す るとノイズの影響を受けやすくなると判断し,係数k = 0.6 を閾値決定のための係数として,検証システムを開発,構 築することにした. 4.3 測位とセンサデータ伝送の処理手順 4.3.1 実装プロセスと処理手順 今回提案する受信側の測 位機能とセンサデータ伝送機能のための処理シーケンス を図7 に示す.本実装では測位機能とセンサデータ伝送機 能(受信側ではセンサデータ抽出機能)を実現するために 各機能を A/D 変換データ取得プロセス,プーリングプロ セス,測位計算プロセス,センサデータ抽出プロセスとし て以下の3 つの観点から 4 つに分割した.ここで,本論文 ではプーリングはデータを各プロセス間で共有するとい う意味で使用しており,プーリングプロセスとは A/D 変 換データ,受信タイミングを一時的に保持,受け渡しを行 うためのプロセスである. 1 つ目は,A/D 変換器のバッファオーバーフローを回避 図5 相関値と受信タイミングの関係 Fig. 5 Relationship between correlation value and received
timing
図6 係数 k と測位精度の関係
Fig. 6 Relationship between coefficient k and positioning accuracy 0 2 4 6 8 10 12 14 16 0.3 0.4 0.5 0.6 0.7 0.8 P os iti oni ng er ror [m m ] k -0.3 -0.2 -0.1 0 0.1 0.2 0.3 7 7.1 7.2 7.3 C or re la tio n Time[ms] 0.8 0.7 0.6 0.5 0.4 0.3 𝑘 = 𝑘 = 𝑘 = 𝑘 = 𝑘 = 𝑘 = Received timing [ms] 0.8 7.15 0.7 7.15 0.6 7.14 0.5 7.14 0.4 7.14 0.3 7.11
するために,A/D 変換データの受信を常に行う必要がある ため, 2 つ目は,プロセス間の独立性を確保し可読性を向上さ せるため, 3 つ目は.プーリングプロセスによって,それぞれのプ ロセス間で A/D 変換データと受信タイミングデータがや り取りでき,かつ,測位計算処理とセンサデータ抽出処理 の同期の確保が不要であり全体の処理を高速化できるた めである. 次に処理のシーケンスを示す.今回はセンサデータとし て32 bit データ(ASCII4 文字分)と設定している.したがっ て,どの区間を抽出しても1 回の復調処理で 1 個分のセン サデータの文字列が含まれるように,1 回の A/D 変換とし て64 bit 分の A/D 変換データを取得する. A/D 変換データ取得プロセスが A/D 変換器のデータを 受信し,プーリングプロセスを開始させる.本取得プロセ スは,センサデータ1 bit 分(M 系列 1 周期分)の A/D 変換 データを受信するごとにプーリングプロセスへ送る. プーリングプロセスは受け取ったことを確認すると測 位計算プロセスを開始し,センサデータ1 bit 分の A/D 変 換データを,この測位計算プロセスに渡す.測位計算プロ セスにより受信タイミング検出と測位計算を行い,受信タ イミングをプーリングプロセスに返す. センサデータ抽出プロセスは,検出された64 個の受信 タイミングと蓄積されたセンサデータ64 bit 分の A/D 変 換データを受信し,本プロセスにおいて逆拡散,復調等か らなるセンサデータの取り出しを行う.測位計算プロセス とセンサデータ抽出プロセスの詳細は以降の項に示す. 4.3.2 測位計算プロセス 測位計算プロセスの処理フロー を図8 に示す.測位処理では,センサデータ 1 bit 分(M 系 列1周期分)の A/D 変換データを受け取り,相関処理を行 う.次に,音源からの信号出力の有無を判定するために信 号対雑音比(SNR(Signal Noise Ratio):SN 比)を計算し,計算 したSN 比の値が事前に設定した閾値(Th)を超えた場合に 測位用の音源が存在すると判断し,以降の処理を行う.こ こで,SN 比は相関値の最大値と相関値データの二乗平均 の平方根の比とした. SNR = max(|rxy|) √∑ (rxy[i]) 2 n−1 i=0 n (5) ここで, rxy :相互相関値からなるベクトルデータ n :データ点数 である.ここでは,これまでの測位実験の経験から,測位 処理を行うか否かの判定を行うためのSN 比の閾値 Th と して 5.2 を設定した.次に,4.2 節で説明した方法でセン サデータ 1 bit(M 系列1周期)ごとに受信タイミング検出 のための閾値a を求めて受信タイミングを検出する.測位 計算の可否判断として,マイクセンサ4 台以上で SN 比が 閾値(Th)を超えるか判別し,超えた場合は測位計算を行い, 検出した受信タイミングをプーリングプロセスに返す. 図7 測位とセンサデータ伝送の処理シーケンス
Fig. 7 Process sequence in the receiving side
図8 測位計算プロセスの処理フロー Fig. 8 Process flow of positioning calculation process A/D Conversion data
reception process Pooling process
Positioning calculation process
Sensor data extraction process A/D Conversion data A/D Conversion data
Received timing
All A/D Conversion data All received timing
・・・ ・・・ • Inverse diffusion • Demodulation • Summation • ASCII conversion ・・・
64 bits of sensor data
64 positioning
64 bits of sensor data • Correlation • Calculation SNR • Received time detection • Positioning calculation Y N Y N Correlation calculation Calculation of SNR SNR > Th
Calculation of threshold 𝛼 for received timing Successful reception point ≧ 4 Positioning calculation (x, y, z, Δt) Th: Threshold = 5.2 Positioning calculation process Return (received timing) Received timing detection
4.3.3 センサデータ抽出プロセス 64 bit 分すべての A/D 変 換データに対して測位処理が終了すると,センサデータ復 調処理を開始する.センサデータ復調処理は,A/D 変換 データとこれまでの測位計算プロセスによって検出した すべての受信タイミングを受け取り,1 bit 分の A/D 変換 データごとに逆拡散・復調・積算を行う.積算がすべて完 了した時点で,ユニークワード(ここでは,01111110 とい うビット列を設定)の検出を行い,ユニークワード後の ビット列を文字列に変換(ASCII 変換)しセンサデータの抽 出を行う. ここで,本手法の逆拡散と復調の方法を図 9 に示す. ピーク判別,すなわち,受信タイミング検出を含めた処理 負荷の観点からは,最初の1 bit 分の受信タイミングのみ を検出し,そこからすべての A/D 変換データに対して逆 拡散・復調を行う方式が望ましい.しかし,送信機と受信 機のクロック誤差により64 bit 分の時間に含まれるチップ 数(図 3 の M sequence code を参照)が送信側と受信側で異 なる可能性がある.このため,逆拡散・復調の開始タイミ ングにずれが生じ,正しくセンサデータを抽出できなくな る.その場合,逆拡散,復調処理による受信側での送信セ ンサデータの再現が困難となる. 定量的に述べると,今回の基本的な設定である1 bit 周 期 20.44 ms を考慮すると 64 bit のセンサデータ長は 1308.16 ms であり,拡散率 511(M 系列次数 9 次)から,そ の時間内には 32704 チップが含まれることになる.1 ⁄ 32704 = 3.06 × 10−5であり,クロックの誤差が10−5~10−6 と思われることから,センサデータ64 bit の時間長におい て,送受信間に含まれるチップ数として,1 チップの差は あり得る.したがって,本検討では,上述するようにセン サデータ1 bit ごとに逆拡散,復調,積算処理を行うこと にした. 5.検証システムの開発 5.1 送信機の設計と評価 送信機の構成と実装機能を図 10 に示す.本システム構成における送信機は,センサデー タを含めた拡散音源を送信するために,次の設計要件のも と設計・製作を行った. センサデータを取得できること. 拡散率511 を満足するために必要なメモリ容量を確 保すること. 移動する物体の動きの測定が可能なことを実証する ために,模型列車(35 mm×111 mm)に搭載できる大き さであること. こ れ ら 3 つ の 要 件 を 満 た す た め に , Raspberry Pi Foundation の Raspberry Pi Zero W(クロック周波数:1 GHz, RAM:512 MB, OS:RASPBIAN STRETCH LITE )を用いた送 信機を作成した.センサデータ取得,一次変調,拡散の処 理はPython 2.7 を用いて実装した.センサデータとして温 度,湿度,気圧を取得可能なセンサ(Bosch:BME280)を搭載 した.アンプ(秋月電子:PAM8403 使用 D 級ステレオアン プモジュール)は小型でかつ,音量調整のしやすいものを, スピーカ(UNISON:U238S4WC)は,小型でかつ,20 kHz 以 上の非可聴音を出力できるものを選択した[18]. 製作した送信機の外観を図11 に示す.拡散音源が本送 信機で出力されるか確認するため,音源周波数を25 kHz, 拡散率を511 に,スピーカとシステムで用いているマイク 図 9 逆拡散と復調の方法
Fig. 9 Method of inverse diffusion and demodulation
図10 送信機の構成と実装機能 Fig. 10 Configuration and implementation function of
transmitter
図 11 送信機の外観 Fig. 11 Overview of transmitter
図 12 拡散音源の測定結果 Fig. 12 Measurement result of diffused sound
Raspberry Pi Zero W
Amplifier Sound source generation
(Rectangular wave) Modulation using sensor data Diffusion by M sequence code
Sensor Temp data etc.
Signal amplification D/A conversion
Speaker
Inverse diffusion by each receipt timing 64 bit(1 Sensor data)
0.04 0.03 0.02 0.01 0 -0.01 -0.02 -0.03 -0.04 C or re la tio n Time[sample] :Received timing
1 bit 1 bit 1 bit 1 bit
0 2000 4000 6000 127000 129000 131000 133000 Diffused sound Diffusion rate:511 0 kHz 50 kHz Raspberry Pi Zero W Amplifier Sensor Speaker 111 mm 35 mm
センサ(Primo:EM-158)の距離を 2 m に設定し,受信側のア ンプから拡散後の音の信号の周波数特性を測定した.拡散 音源の確認結果を図12 に示す.結果から,周波数帯域 に広がった波形が確認できたため,作成した送信機で拡散 音源を送信できることを確認した.ここで,20 kHz を超え たあたりからレベルが低下しているのは,スピーカの性能 によるものと思われる. 5.2 検証システム構成 構築した検証システムの構成 を図13 に示す.使用する A/D 変換器は必要な変換速度を もち,かつ,マイクセンサを接続した受信機が5 点である ことから,チャネル数が5 チャネル以上,A/D 変換データ をPC に送信する際の伝送速度が測位の時間間隔に影響す ることから,伝送速度が高速であることを条件に検討した. これらの条件を満たすものとして,CONTEC 社の AIO-163202FX-USB(アナログ入力チャネル数:32 ch,サンプリ ングレート:2 μsec/ch(max),AD 変換分解能:16 bit,転 送速度:480 Mbit/s)を選択した.測位計算・伝送処理用 PC として汎用マシンである,マウスコンピューターの MB-P500X3-SS2H9(OS:Windows 10 Home 64bit,CPU:Intel® Core i7-7700 CPU @ 3.60 GHz,メモリ:32.0 GB DDR4)を 使用し,処理は,今後の測位アプリケーションの開発等を 考慮し,オブジェクト言語の一つである C#を用いて記述 した. 6. 特性評価実験と結果 6.1 実験構成 実利用環境での本システムの測位精度と 伝送品質を評価する実験を行うための実験構成を図14 に 示す.実験用治具の天井四隅と天井の中央に計5 個のマイ クセンサを垂直床向きに設置した.マイクセンサの高さは 約0.9 m だが,送信機と受信機間の距離として天井高さを 想定した2.5 m 以上の距離を確保した場合での音の伝達に ついてはすでに確認しており[19],今回は実験エリア(静音, 騒音)間の移動の容易性を考慮し,キャスター付きの実験 用治具を用いた.伝送特性評価のために,乱数としてラン ダムな0(-1),1 のデータ系列を作成し,あらかじめ送信機 内のメモリに格納した.これは,実際のセンサデータを用 いた場合は,その値の変動があり,実際に送信した0,1 の 判定が困難なためである.構築した実験システムのセット アップを図15 に示す.静音実験は環境音が 40.9~65.9 dB の研究室内で行い,騒音実験は環境音が68.6~83.3 dB の 本学食堂で行った.設定した実験パラメータを表 1 に示 す.音源周波数は非可聴音により近づけるために 25 kHz とした(実際は拡散により可聴音となるが,音源周波数を 図15 実験システムのセットアップ Fig. 15 Experimental setup
表1 実験パラメータ Table 1 Experimental parameter 図13 システム構成
Fig. 13 System configuration
図 14 実験構成 Fig. 14 Experimental configuration
Microphone sensor Frame PC Amplifier USB Modulated SS signal A/D Converter Transmitter Microphone sensor #2 #3 #4 #5 x y z #1 Sensor No. x y z #1 0 620 955 #2 880 620 955 #3 880 0 955 #4 0 0 955 #5 440 310 905 Position of sensors[mm] Sound source (Transmitter) Experimental jig Microphone sensor Transmitter side PC Amplifier A/D converter Overview Receiving side Transmitter Parameters Value Tr an sm is si on
Waveform Rectangular wave
Source frequency : a 25 kHz Sampling rate : b 50 kHz b = 2a 1 sample length : c 20 μs c = 1 / b 1 chip length : d 40 μs d = 2c R ec ept ion Sampling rate: e 100 kHz e = 2b
Order of M sequence 8thorder 9thorder
Diffusion rate : f 255 511
M sequence period : g 255 chip 511 chip g = f
1 bit time length of data : h 10.20 ms 20.44 ms h = dg
25 kHz に設定しているため,カットオフ周波数を高い周 波数に設定することができ,ハイパスフィルタを挿入する ことにより聞こえにくい領域で使用することが可能であ る.). 6.2 静的実験による評価 6.2.1 音源数の影響と拡散率 本検証システムの静音環境 における測位精度および伝送品質評価のため,拡散率255 と511 を音源数 1 個と 2 個で比較した実験を行う.音源 1 は実験用治具床面中央に設置し,音源2 は x 方向に+220 mm 離して設置した.測位精度と伝送品質を検証するため, 式(5)で示した SNR,測位 100 回分のそれぞれ x, y 方向の 誤差,式(4)で示した RMS 誤差とセンサデータを想定した ランダムな1000 bit の誤りビット数を評価した.なお,実 験は前述の条件で3 回行い,それらの平均値を評価したも のである.測位精度と伝送品質を表2 に示す.ここで,表 中のTr.1,Tr.2 は音源とした個々の送信機である. この結果より,静穏環境で音源数1 個の場合では,拡散 率255 では SNR が 7.6 に対して,拡散率 511 では 10.7 で あり,SNR は 3 程度の向上が見られたが,測位精度や伝 送品質に大きな性能向上は見られなかった.これは拡散率 255 でも十分な SNR が確保でき,受信タイミング検出の 誤りが少なかったためと考えられる. 一方,音源が2 個の場合では,拡散率 255 のとき測位精 度が大幅に劣化するとともに,伝送品質は測定不能となっ た.これは,相関値のピークが不明瞭となり,受信タイミ ングの検出,つまり逆拡散,復調の開始判断ができなかっ たためである.なお,電波を用いたCDMA の場合では, 拡散率255 でも 2 ユーザ収容することができると考えら れるが,本構成ではセンサデータを重畳した拡散音をス ピーカから発信しているため,スピーカの特性により送信 波形が劣化し,2 ユーザの収容ができなかったと考えられ る.拡散率511 にした場合では,相関値のピークがより明 瞭となってSNR が向上し,測位精度と伝送品質に大幅 な改善が見られ(RMS 誤差として,10.3 mm,8.0 mm),1 台 の場合とほぼ同じ品質の特性を確保できた.誤差と誤りの 原因は,拡散率511 の場合でも受信タイミングの検出に誤 りが生じたことがあったためである. 表2 における音源数 2 個のときの測位結果を図 16 に示 す.拡散率を上昇させると測位結果のばらつきが減少して いる.拡散率511 の結果では 255 の結果に比べて,明らか に音源付近に測位結果がより集中している.これは,より 多数の音源を収容するためには,拡散符号の次数を上げる ことで対応可能であることを裏付ける結果である. 6.2.2 騒音の影響と拡散率 騒音環境下において拡散率 255 と 511 を音源数 1 個で比較した測位結果と伝送品質を 表3 と図 17 に示す.静音環境下における音源数 1 個のと きの表2 と比較して,どちらの拡散率においても測位精度 と伝送品質に劣化があまり見られないことを確認した.こ の結果から,騒音が測位精度と伝送品質に与える影響は小 表2 測位精度と伝送品質(静音時)
Table 2 Positioning accuracy and transmission quality (in quiet)
図16 実験結果(静音時) Fig. 16 Experimental result (in quiet)
表3 測位精度と伝送品質(騒音時) Table 3 Positioning accuracy and transmission quality
(in noisy)
図17 実験結果(騒音時) Fig. 17 Experimental result (in noisy)
Parameter SNR Positioning error[mm] Number of error bit Average x Average y RMS
Diffusion rate: 255 7.7 -4.5 -4.4 1.6 3 / 1000 Diffusion rate: 511 10.5 -5.0 -5.2 1.6 1 / 1000 in noisy:68.6 ~ 83.3 dB
Parameters SNR
Positioning error[mm] Number of
error bit Average x Average y RMS Tr.1 Tr.2 Tr.1 Tr.2 Tr.1 Tr.2 Tr.1 Tr.2 Tr.1 Tr.2 Diffusion rate: 255 Number of Transmitter: 1 7.6 -0.5 -4.0 7.6 8 / 1000 Number of Transmitter: 2 5.3 5.6 5.0 -5.6 -3.1 -10.2 65.6 42.3 ― ― Diffusion rate: 511 Number of Transmitter: 1 10.7 0.2 -5.6 5.9 3 / 1000 Number of Transmitter: 2 7.3 8.0 -0.2 -5.6 -1.1 -11.2 10.3 8.0 21 / 1000 39 / 1000 in quiet:40.9 ~ 65.9 dB ―:Unmeasurable Tr.1:Transmitter1 Tr.2:Transmitter2 0 100 200 300 400 500 600 700 y[mm] x[mm]
Diffusion rate:255 Diffusion rate:511 Position of transmitter 0 100 200 300 400 500 600 700 y[mm] x[mm] Tr. Position [mm] x y #1 440 310 #2 660 310
Positioning result #1 Positioning result #2 Transmitter #1 Transmitter #2 Microphone sensor Number of transmitter: 2 In quiet 0 100 200 300 400 500 600 700 y[mm] x[mm] 0 100 200 300 400 500 600 700 y[mm] x[mm] Diffusion rate:255 Diffusion rate:511
Position of transmitter Tr. Position [mm]
x y
#1 440 310
Positioning result #1 Transmitter #1 Microphone sensor
Number of transmitter: 1 In noisy
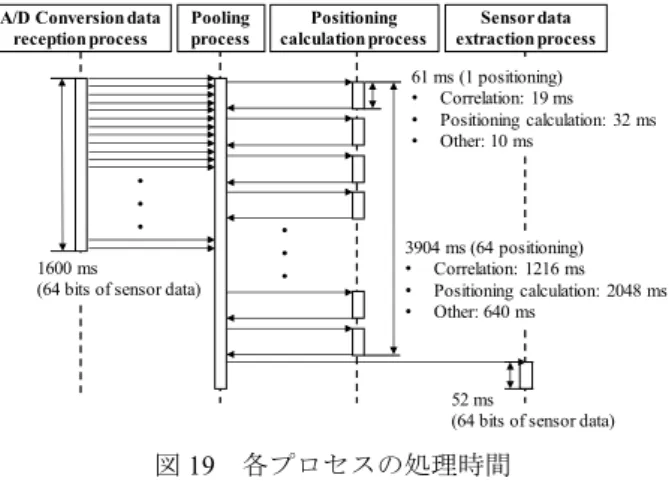
さいと考えられる.これは,本手法で用いている拡散符号 によるスペクトラム通信が環境雑音耐性を有しているこ とを裏付けているものと考えられる. 6.3 動的実験による検証 実利用の観点から,複数の移 動体に対する測位精度とセンサデータ伝送の動的実験に よる検証を行う.本実験では実験用治具の床面にレールを 設置し,レール上に音源を取り付けた2 台の模型列車を走 行させ(速度:約 0.2 m/s),各音源の測位とセンサデータ伝 送を行った.内側の移動体には音源1 を,外側の移動体に は音源2 を使用し,拡散率は 511 とした.実験は静音環境 で行った.PC の出力画面の一例を図 18 に示す. 図18 右側の測位結果は,精度として概ねレールの幅(4 cm)以内の誤差であることを確認した.ここで,中央に 18 点(全測位点数は 1382 点)の誤差の大きな結果が出現して いるが,これは受信タイミング検出時の誤差によるものと 思われる.このように,測位結果の誤差が大きい結果につ いては,測位対象の移動速度の考慮,マイクセンサの受信 範囲などの現実的な観点を考慮することで高い確度で取 り除くことができると考える. 図18 左側は音源 1(温度センサデータを重畳)と音源 2(気 圧センサデータを重畳)のセンサデータ抽出を行った結果 である.結果は5 点のマイクセンサで受信し,2 つの音源 を設置しているため,すべての伝送ビットで誤りなく取得 できれば5 点×2 音源で 10 個の受信結果が表示されるこ とになる.ここでは,ビット誤りによりユニークワードが 取得できなかったデータ,ASCII 変換後に非数値となった データは表示していない.そのため,例えば一番上に表示 されている受信回数51 のときでは,音源 1 はマイクセン サ3 台分の温度データ,音源 2 はマイクセンサ 3 台分の気 圧データの結果表示となった.受信機数が5 点あり,現状 の誤り率では誤り訂正なしでもこの冗長構成によりセン サデータ受信が可能である. 各プロセスの処理に要した時間を図19 に示す.ここで, 結果は音源1個当たりの時間であり,2 個の時は 2 倍の時 間となる.測位の時間間隔は,本提案手法の測位とセンサ データ伝送を共存させた場合,拡散率511 で音源 1 台あた り約61 ms であった. センサデータ抽出プロセスにおいて,逆拡散・復調・積 算・ASCII 変換をセンサデータ 64 bit 分行ったときの処理 時間は約52 ms である.ここで,本システムでは測位計算 プロセスの中で逆拡散・復調の開始タイミングである受信 タイミングを求めて,64 回の測位計算プロセス(処理時 間:3904 ms)終了後にセンサデータ抽出処理を行っている. このため,現プロセス構成では,センサデータの表示の時 間間隔は約3956 ms 間隔であり,断続的な出力である. 本システムでは5 点からセンサデータ 64 bit(3956 ms)を 同時に受信している.したがって,システムの伝送速度と して64 3.956⁄ × 5 = 80 bit s⁄ である.なお,ここでは,装 置構成の容易さから温度,気圧という屋内では変化の少な いデータでの確認としたが,実用的には,心拍センサや加 速度センサが考えられる.その場合は,温度や気圧データ に比べて変化が速いことと,伝送速度の制約を考慮し,生 データの送信以外に,その平均値や分散などを算出して送 信する方法も検討する必要がある. 7. むすび 測位システムにセンサデータ伝送機能を具備すること を目標に,測位に用いている音源を用いてセンサデータを 伝送する方法を示し,シミュレーションによってその妥当 性を確認した.そして,測位機能とセンサデータ伝送機能 の両機能を同一のハード構成で実現するシステムアーキ テクチャを設計し,そのシステムを実装・構築した.音源 数や環境を変えて測位精度と伝送品質を評価した結果,音 源数の増加による特性劣化(RMS 評価で 65.6 mm,42.3 mm)は,拡散符号の次数の上昇によりそれぞれ 10.3 mm, 8.0 mm に改善できること,伝送品質の測定ができなかっ た品質を21/1000,39/1000 の誤り率に抑えられること,ま た,環境騒音に対しては問題となる特性劣化が発生しない ことを確認した.現在,受信機同士の同期確保やPC への 受信タイミング送信は有線形式で行っているが,設置負荷 の軽減や容易な広域化のためには無線方式での実装が望 ましいと考えられる. (平成30 年 6 月 4 日受付,7 月 27 日再受付) 図18 PC の出力画面
Fig. 18 Screen shot of PC
図19 各プロセスの処理時間 Fig. 19 Processing time of each process
100 mm
A/D Conversion data reception process Positioning calculation process Sensor data extraction process ・・・ ・・・ 3904 ms (64 positioning) • Correlation: 1216 ms • Positioning calculation: 2048 ms • Other: 640 ms 52 ms
(64 bits of sensor data) Pooling
process
1600 ms
(64 bits of sensor data)
61 ms (1 positioning) • Correlation: 19 ms • Positioning calculation: 32 ms • Other: 10 ms
文 献
[1] 内閣府宇宙開発戦略推進事務局, みちびき(準天頂衛星シ ステム), http://qzss.go.jp/.
[2] R. Mautz, “Overview of current indoor positioning systems,” GEODESY AND CARTOGRAPHY, Vol.35, No.1, pp.18-22, 2009.
[3] 秋山征己, 須永光, 五百蔵重典, 田中博, “超音波センサを 用いた広域屋内測位システムの構成と検証実験,” 測位航 法学会論文誌, Vol.3, No.1, pp.1-8, 2012.
[4] C. Yara, M. Akiyama, S. Ioroi, H. Tanaka, “Indoor Positioning system using Ultrasonic Sensors as a Position Information Infrastructure for a Wide Area,” The Second Asian Conference on Information System (ACIS2013), pp.386-389, 2013.
[5] 村田翔太郎, 金田一将, 五百蔵重典, 田中博, “スペクトラ ム拡散を用いた複数音源の収容可能な高精度屋内測位の提 案と検証,” 測位航法学会論文誌, Vol.7, No.1, pp.1-10, 2016. [6] 金田一将, 成岡雅, 五百蔵重典, 田中博, “音を用いた屋内 即位における処理高速化のためのSoC ボードによる分散処 理構成とその検証,” 信学技報, ITS2016-85, pp.49-56, 2016. [7] 杉本末雄, 柴崎亮介, “GPS ハンドブック,” 朝倉書店, 3 章 (衛星から送信される信号), pp.40-63, 2010. [8] 水垣健一, 藤原亮介, 中川樹生, 宮崎祐行, 前木陽, 緒方祐 次, 小林真輔, 越塚登, 坂村健, “マルチパス環境下での UWB 高精度測位システム,” 2007 年電子情報通信学会ソサ イエティ大会, B-20-9, p.388, 2007. [9] 白鳥雄大, 上田裕巳, 坪井利憲, “RFID 位置検出技術を用い た屋内移動動線算出アルゴリズム,” 信学技報, CS2011-8, pp.45-50, 2011.
[10] C. Medina, J. C. Segura, A. D. la Torre, “Ultrasonic Indoor Positioning System Based on a Low-Power Wireless Sensor Network Providing Sub-Centimeter Accuracy,” Sensors, Vol.13, pp.3501-3526, 2013.
[11] 川下勝平, “超音波式 3 次元トラッカー ZPS-VK,” 日本 VR 学会誌, Vol.11, No.1, pp.50-51, 2006.
[12] T. Akiyama, M. Sugimoto, H. Hashizume, “Time-of-arrival based Indoor Smartphone Localization Using Light-synchronized Acoustic Wave,” IEICE TRANS. FUNDAMENTALS, Vol. E100.A, Issue 9, pp.2001-2012, 2017. [13] 伊与田健敏, 横道大助, “スマートデバイスを用いた屋内測 位システム,” 超音波 TECHNO, 5-6, pp.48-52, 2017. [14] 本間裕介, 森谷潤一郎, 長谷川孝明, “可聴音波及び超音波 を用いた逆 GPS 方式位置特定システムの比較実験,” 電子 情報学会論文誌 A, Vol.J91-A, No.1, pp.139-142, 2008. [15] C. V. Lopes, P. M. Q. Aguiar, “Aerial Acoustic Communications,”
IEEE Workshop on Application of Signal Processing to Audio and Acoustics, 4 pages, 2001. [16] 中島悠輔, 松岡保静, 吉村健, “音響 OFDM の空中伝送特性,” 信学技報, RCS2006-82, pp.139-144, 2006. [17] ス マ ー ト ソ リ ュ ー シ ョ ン テ ク ノ ロ ジ ー , SSTouch, http://www.sstinc.co.jp/company/product?#sstouch. [18] 門倉丈, 森下航平, 五百蔵重典, 田中博, “伝送機能を具備 する屋内測位システムにおける音源スピーカの特性への影 響,” 測位航法学会 GPS/GNSS シンポジウム, OS3-6, 1 page, 2017.
[19] T. Kadokura, K. Morishita, S. Ioroi, H. Tanaka, “Proposal and Evaluation of a Data Transmission Method for using Sound in Accurate Indoor Positioning,” The Seventh International Conference on Ambient Computing, Applications, Service and Technologies (AMBIENT 2017), pp.34-37, 2017. 著者紹介 門倉 丈 (学生員) 2018 年神奈川工科大学情報工学科卒. 現在,同大学大学院博士前期課程在学中.主として屋内測 位技術に関する研究に従事.電気情報通信学会の学生員. 森下 航平 (非会員) 2018 年神奈川工科大学情報工学科 卒.在学中,主として屋内測位の応用システムに関する研究 に従事.現在,ドコモ・テクノロジ(株)所属. 五百蔵 重典 (非会員) 1993 年東京理科大学理学部応用 数学科卒.同年(株)PFU 入社(~1994 年).1999 年北陸先 端科学技術大学院大学博士課程後期修了.同年神奈川工 科大学情報工学科助手.2008 年~同大学准教授.2013 年~ 同大学教授.現在,ソフトウェア工学,ユビキタスシステムおよ び入力インタフェースのデザインに関する研究に従事.情報 処理学会,ソフトウェア科学会,ACM などの会員.博士(情報 科学). 田中 博 (正員) 1983 年北海道大学工学部精密工学科卒. 1985 年同大学大学院工学研究科修士課程修了.同年日本 電信電話(NTT)入社.以来,衛星通信用搭載機器および衛 星通信システムに関する研究開発に従事.1994~1997 年ま で宇宙開発事業団(現宇宙航空研究開発機構)に出向.2006 年~神奈川工科大学情報工学科教授.現在,ユビキタスシス テムデザインおよびヒューマンインタフェースとその検証に関 する研究に従事.電子情報通信学会,情報処理学会,ヒュー マンインタフェース学会,教育システム情報学会会員,AIAA Senior Member.博士(工学).