健伸学院 Kenshin Gakuin
順天堂大学スポーツ健康科学部(体操競技研究室) Seminar of Artistic Gymnastics, Graduate School of Health and Sports Science, Juntendo University
〈原
著〉
平行棒における「前振り上がり後方かかえ込み
2
回宙返り腕支持(ドミトリェンコ)」の技術に関する一考察
木下紘一郎・加納
實
・冨田
洋之
・原田
睦巳
A Study of the Technique of the ``Dimitrenko'' (Upper arm swing to backward
double salto to upper arm re-grasp) Performed on the Parallel Bars
Koichiro KINOSHITA, Minoru KANO
, Hiroyuki TOMITA
and Mutsumi HARADA
Abstract
The Code of Points in 2006 brought a big revolution to the world of artistic gymnastics. In order to attain a higher score, a gymnast must increase the level of di‹culty, while maintaining perfect form. The ``Dimitrenko'' was introduced during the 1998 World Cup in Sabae by Mr. A. Dimitrenko, a Kazakhsta-ni gymnast. Currently this skill is rated ``E'' in di‹culty.
Two diŠerent approaches can be observed when an athlete performs the ``Dimitrenko.'' The focus is on the head position during the tap swing or, in other words, the phase before the salto occurs, and the other is the head position during the double salto itself. The ``Head-In'' style refers to a position in which the head is tucked in and the body is in a hollowed position. The ``Head-Out'' style refers to a position in which the head position is thrown out and the body is in an arched position.
The purpose of this research was to analyze which technique mentioned above, is more e‹cient when performing the ``Dimitrenko,'' from a morphological point of view.
The following points were conˆrmed by this research:
1. The ``Head-In'' technique during the release point allows a smoother transition from the upper-arm hang position to the salto phase.
2. During the re-catch of the bars following the double salto, the upper-body should maintain a hol-lowed position. The body and legs should begin to extend through the knee joint rather than the thigh joint while the body as a whole is directed toward the parallel bars.
Key words: artistic gymnastics, Parallel Bars, ``Dimitrenko'', head position
.
は じ め に
. 体操競技の採点規則と平行棒の演技構成に おける現状 体操競技は採点競技系4)のスポーツであり,FIG ( 国 際 体 操 連 盟 ) に よ っ て 作 成 さ れ た Code of Points(採点規則)3)に基づいて採点・評価される. 2006年にこれまでの10点満点が廃止される大幅な ルール改正が行われた8).現行の2009年版採点規則 は,2006年版採点規則に一部修正を行ったものであ る9). 表 11~14 は2006年・2007年世界体操競技選手 権大会,2008年第29回オリンピック・北京大会, 2009年世界体操競技選手権大会における種目別決勝表 11 第39回世界体操競技選手権・オーフス大会 (2006年) A 難度 B 難度 C 難度 D 難度 E 難度 F 難度 1 位の選手 0 1 1 5 2 1 2 位の選手 0 0 5 2 3 0 2 位の選手 0 1 1 6 2 0 表 12 第40回世界体操競技選手権・シュツットゥ ガルト大会(2007年) A 難度 B 難度 C 難度 D 難度 E 難度 F 難度 1 位の選手 0 0 1 5 4 0 1 位の選手 0 0 1 6 2 1 3 位の選手 0 0 2 4 4 0 表 13 第29回オリンピック・北京大会(2008年) A 難度 B 難度 C 難度 D 難度 E 難度 F 難度 1 位の選手 0 0 1 5 3 1 2 位の選手 0 0 0 6 3 1 3 位の選手 0 0 2 4 3 1 表 14 第41回世界体操競技選手権・ロンドン大会 (2009年) A 難度 B 難度 C 難度 D 難度 E 難度 F 難度 1 位の選手 0 0 0 5 5 0 2 位の選手 0 0 1 4 5 0 3 位の選手 0 1 2 4 3 0 平行棒の上位 3 選手の演技構成を各競技会が行われ た際に適用された採点規則に準じて難度別に表した ものである.2006年以降 B 難度の技を演技に組み 入れる選手は,2009年に行われた世界選手権・ロン ドン大会の 3 位の選手のみである.また,C 難度の 技においても減少傾向にある.つまり,演技価値点 を上げるために D 難度以上の高難度の技だけを演 技構成に組み入れる傾向にあることが伺える.その 結果演技時間の増大を引き起こし,選手にとって高 難度技の技術の習得のみならず,怪我や故障といっ た身体的な負荷も大きくなってくる5).この演技構 成の高難度技への集中傾向は今後も続いていくもの と推察される. すべての技は 5 つの要求グループに分けられてお り,跳馬以外の 5 種目において実施される技のグ ループの偏りに対し,同じグループの技の実施は 4 技までと制限され,演技構成はすべての要求グルー プから調和よく実施されなければならない. 2009年版採点規則における平行棒の要求グループ は以下の通りである. .両棒での支持技 .腕支持振動技 .単棒または両棒での長懸垂振動技 .逆懸垂振動技 .終末技 振動運動領域である技を組み合わせて,平行棒の 上下の広い空間をリズミカルにそしてダイナミック に実施することが平行棒運動の特性4)9)として考え られるが,2009年版採点規則により 2 回宙返りを行 う平行棒の宙返り技について,姿勢の異なる同じ種 類の宙返りの技を行うことはできない9)と明記され た. したがって,運動形態が同じ技においてこれまで の実施と異なり,かかえ込み姿勢で実施した技と屈 身姿勢で実施した技の両方の技を実施することがで きなくなった. 要求グループや宙返り技の制限の中で選手が高得 点を得るためには,すべての要求グループから高難 度技を演技構成に組み入れていかなければならない が,2009年に行われた第63回全日本体操競技団体・ 種目別選手権大会における男子種目別決勝平行棒に 出場した 8 名の選手の演技価値点に含まれる要求グ ループ(腕支持振動技)の技は前振り上がり(A 難度)が 1 技,前振り上がり開脚抜き倒立(B 難度) が 3 技,後ろ振り上がり前方屈身宙返り支持(D 難度)が 1 技,前振り上がり後方かかえ込み 2 回宙 返り腕支持(ドミトリェンコ)(E 難度)が 2 技で あった.演技構成上演技価値点に含まれなかった要 求グループの技があったが,国内最高峰の種目別 競技会において要求グループの D 難度以上の高
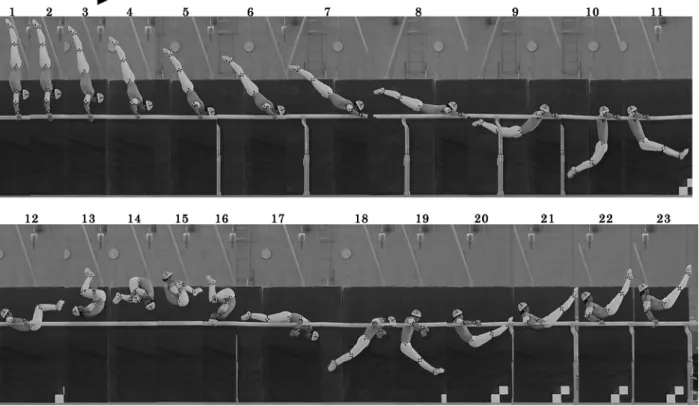
図 1 「ドミトリェンコ」の運動経過 難度技の実施は 3 技と非常に少ないということが現 状であるといえる.世界的動向を考慮した上でも今 後は要求グループにおいて高難度の技の実施が必 要不可欠になってくると推察される. . 「ドミトリェンコ」 本研究で取り上げる,「前振り上がり後方かかえ 込み 2 回宙返り腕支持(以下,ドミトリェンコとす る)」は平行棒の要求グループの E 難度に位置づ けられている技である. 「ドミトリェンコ」という技は,カザフスタンの A. ドミトリェンコ選手が1998年ワールドカップフ ァイナル・鯖江大会において初めて実施し,その選 手の名前をとって名づけられた技である7).この技 は,「倒立位から腕支持体勢に振り下ろし,前振り 上がりをし,後方にかかえ込み姿勢で 2 回宙返りを 行い,再び腕支持体勢になり,前振りにつなげる 技」である(図 1).「ドミトリェンコ」は,かかえ 込み姿勢をすっきり美しく行い,身体のほどきによ ってスムーズに腕支持前振りにつなげなければなら ない.発展技には「前振り上がり後方屈身 2 回宙返 り腕支持(F 難度)」がある. 2006年・2007年世界体操競技選手権大会,2008年 第29回オリンピック・北京大会における種目別決勝 平行棒において「ドミトリェンコ」の実施は,2006 年に 1 名の実施であったが,2007年に 3 名,2008年 には 5 名と世界トップクラスの選手が演技構成に組 み入れるようになった技である. 「ドミトリェンコ」は金子4)による平行棒の技の 体系の分類によると腕支持系の腕支持前振り技群に 属すると考えられ,腕支持前振りから後方に回転し 倒立位になる翻転倒立から発展してきた技とも考え られる.しかしながら,本研究は後方にかかえ込み 姿勢で 2 回宙返りを行うという運動形態であること と,「ドミトリェンコ」を実施した選手の運動経過 において,頭を前方(腹の方向)に曲げる「腹屈頭 位」で実施している選手と,頭を後方に曲げる「背 屈頭位」で実施している選手がおり,頭位の捌き方 の違いが観察されることから特に頭位に着目し研究 を行うこととする.
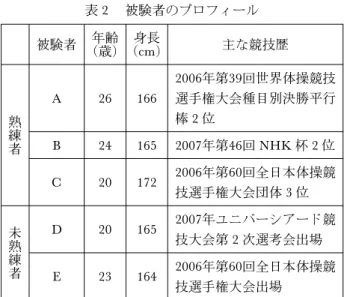
表 2 被験者のプロフィール 被験者 (歳)年齢 (cm)身長 主な競技歴 熟練 者 A 26 166 2006年第39回世界体操競技 選手権大会種目別決勝平行 棒 2 位 B 24 165 2007年第46回 NHK 杯 2 位 C 20 172 2006年第60回全日本体操競 技選手権大会団体 3 位 未熟 練者 D 20 165 2007年ユニバーシアード競 技大会第 2 次選考会出場 E 23 164 2006年第60回全日本体操競 技選手権大会出場 また,「ドミトリェンコ」が発表されてから間も ないため,「ドミトリェンコ」に関する研究は国内 外を通して,安達ら1)2)の「ドミトリェンコ」にお ける被験者 2 名の個人的な遂行方法の紹介に止まる 研究のみであることからも「ドミトリェンコ」の技 術解明は急務であるといえる. . 研究目的 「ドミトリェンコ」の理想像は,後方 2 回宙返り の回転効率がよく,宙返り後に水平以上の体勢で身 体を伸ばし,大きな衝撃を受けることなくスムーズ に前振り上がりにつなげることができる捌き方であ ると考える. 「ドミトリェンコ」の運動経過を観察すると,宙 返りの回転時やその前後時に「腹屈頭位」と「背屈 頭位」の捌き方の違いが観察される. 本研究は,「ドミトリェンコ」の主要局面である 宙返り局面およびその前後時と頭位の関係につい て,モルフォロギー的観点から技術を明らかにする ことを目的とした.
.
研 究 方 法
. 実験構成 実験課題の撮影は客観的資料を作成するために横 方向から,デジタルビデオカメラ(Victor 社製 GZMC200)1 台で撮影を行った. カメラの位置は横方向を平行棒の中心位置からカ メラまでの距離を19m00cm とし,高さを 1m98 cm とした.また,撮影の際,基準版 2 個と縮尺版 1 個 を設置した. 各被験者には身体各部位にテープを貼るととも に,頭頂部で交差する線の入った帽子を着用して撮 影を行った. . 実験課題および被験者 .. 実験課題 実験課題は平行棒の「ドミトリェンコ」とした. また,被験者それぞれのやり方で「ドミトリェンコ」 を 3 回実施し,最も出来栄えの良かった試技を採用 した. 被験者には実施した直後に毎回,インタビュー形 式で自己観察報告および自己評価を行った. .. 被験者 「ドミトリェンコ」を演技構成に組み入れて いる 3 名の被験者をここでは熟練者とした.またそ の 3 名は,男子体操競技一種公認審判免許有資格者 3 名の見解により熟練者と判断された(被験者 A・ B・C). 「ドミトリェンコ」は実施できるが,まだ演 技構成に組み入れられない被験者 2 名をここでは便 宜上,未熟練者とした(被験者 D・E). 被験者のプロフィールは表 2 の通りある(2007年 8 月 7 日現在). . 資料および考察方法 .. 資料 デジタルビデオカメラで収録した試技は,コンピ ュータに取り込み,自己観察報告で最も出来栄えが 良いと報告された試技の連続局面図を原資料として 作成した. 自己観察報告は IC レコーダーに収録したものを まとめた.また,男子体操競技一種公認審判免許有 資格者 3 名による他者観察報告をまとめた. .. 考察方法 原資料を基に,次の考察点を設け,被験者間にお ける試技についてモルフォロギー的観点から比較考 察を行った. 離手時の頭位ならびにかかえ込み姿勢になっ図 2 離手時の頭位 図 3 かかえ込み姿勢になった局面 たときの上体傾斜角度について 宙返り局面における頭位について 宙返り局面から腕支持に移行する局面につい て 「熟練者」と「未熟練者」の被験者間の特徴をま とめ,上記の 3 つについて,モルフォロギー的観点 から,特にマイネルの運動質のカテゴリーの中から 「運動構造」「運動伝導」「運動流動」「運動の先取 り」6)に着目して比較考察を行った.
.
結果および考察
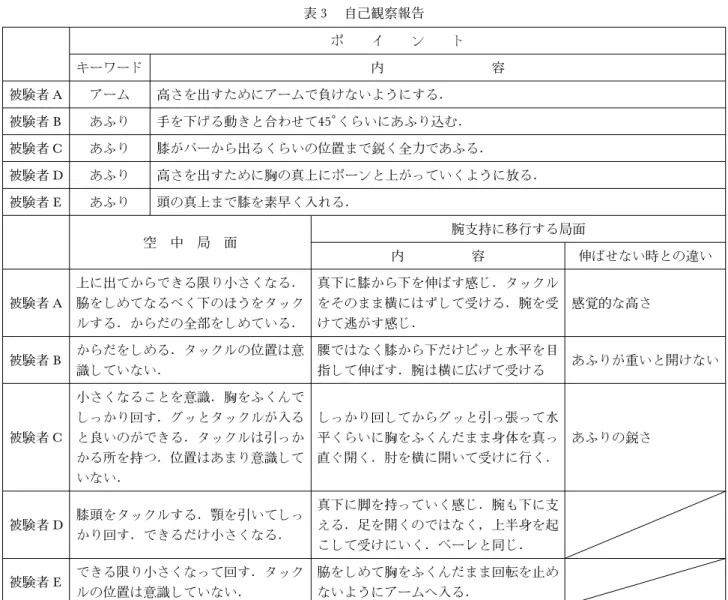
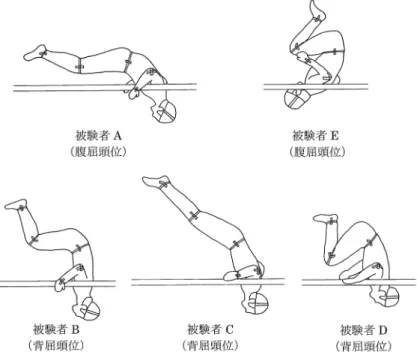
1) 離手時の頭位ならびにかかえ込み姿勢になっ たときの上体傾斜角度について 離手時は,腕支持前振りから後方かかえ込み宙返 りに移行する際の平行棒から上腕が離れた局面と し,両手で膝を十分にかかえ込んだ姿勢になった局 面をかかえ込み姿勢とした. 腕支持前振りから宙返りに移行する際の離手時の 局面とかかかえ込み姿勢になったときの上体傾斜角 度は,熟練者と未熟練者とで明確な違いがみられた. 図 2 は腕支持前振りから後方かかえ込み宙返りに 移行する離手時を図にしたものである. 図 3 はかかえ込み姿勢になった局面を図にしたも のである.また,図 3 は被験者の上体傾斜角度とな る肩・腰点を結ぶ罫線を引いたものである.上体傾 斜角度については,倒立から振り下ろし,腕支持体 勢で肩点と腰点を結んだ線が平行棒と垂直になった 状態を上体傾斜角度 0°とした. 自己観察報告において全被験者が腕支持前振りか ら宙返りに移行する局面に意識が集中していること から,この局面での動きが「ドミトリェンコ」を行 う際に最も重要になってくると推察される(表 3). 離手時における各被験者の頭位は,熟練者である 被験者 A・B・C は腹屈頭位,未熟練者である被験 者 D・E が背屈頭位で実施し,離手後かかえ込み姿 勢 になっ た局 面の上 体傾 斜角度 は, 被験者 A は 195.8°,被験者 B は202.0°,被験者 C は200.0°,被 験者 D は173.2°,被験者 E は152.4°という結果であ った. すなわち,熟練者である被験者 A・B・C は腹屈表 3 自己観察報告 ポ イ ン ト キーワード 内 容 被験者 A アーム 高さを出すためにアームで負けないようにする. 被験者 B あふり 手を下げる動きと合わせて45°くらいにあふり込む. 被験者 C あふり 膝がバーから出るくらいの位置まで鋭く全力であふる. 被験者 D あふり 高さを出すために胸の真上にポーンと上がっていくように放る. 被験者 E あふり 頭の真上まで膝を素早く入れる. 空 中 局 面 腕支持に移行する局面 内 容 伸ばせない時との違い 被験者 A 上に出てからできる限り小さくなる. 脇をしめてなるべく下のほうをタック ルする.からだの全部をしめている. 真下に膝から下を伸ばす感じ.タックル をそのまま横にはずして受ける.腕を受 けて逃がす感じ. 感覚的な高さ 被験者 B からだをしめる.タックルの位置は意 識していない. 腰ではなく膝から下だけピッと水平を目 指して伸ばす.腕は横に広げて受ける あふりが重いと開けない 被験者 C 小さくなることを意識.胸をふくんで しっかり回す.グッとタックルが入る と良いのができる.タックルは引っか かる所を持つ.位置はあまり意識して いない. しっかり回してからグッと引っ張って水 平くらいに胸をふくんだまま身体を真っ 直ぐ開く.肘を横に開いて受けに行く. あふりの鋭さ 被験者 D 膝頭をタックルする.顎を引いてしっ かり回す.できるだけ小さくなる. 真下に脚を持っていく感じ.腕も下に支 える.足を開くのではなく,上半身を起 こして受けにいく.ベーレと同じ. 被験者 E できる限り小さくなって回す.タック ルの位置は意識していない. 脇をしめて胸をふくんだまま回転を止め ないようにアームへ入る. 頭位で離手し,かかえ込み姿勢になったときの上体 傾斜角度は180°以上回転し,一方未熟練者である被 験者 D・E は,背屈頭位で離手し,かかえ込み姿勢 になったときの上体傾斜角度は180°未満であり,腹 屈頭位で離手を行った熟練者は,背屈頭位で離手を 行った未熟練者よりも多く回転していることがわか る. 熟練者は,腕支持前振りから離手する際に腹屈頭 位で実施することによりかかえ込み姿勢の先取りを しているのではないかと推測される.そのことによ り頭部から胴体への伝導,そして胴体から脚への伝 導と動きの伝導が流れるようにスムーズにかかえ込 み姿勢に移行できたものと考えられる.すなわち, 腕支持から宙返り局面への移行をスムーズに行うこ とができ,運動の先取り,運動流動,運動伝導の観 点から合目的的,経済的な動きであることが推察さ れ る. そ のた め, か かえ 込 み動 作に 入 ると きに 180°以上回転することができたと考えられる.ま た,他者観察報告者が離手時に腹屈頭位の方がス ムーズであると報告している.すなわち,離手時に 腹屈頭位で実施することが,腕支持前振りから宙返 り局面への移行をスムーズに行うための技術である と推察される. 一方,離手時に背屈頭位で実施した未熟練者であ る被験者 D・E は離手時に背屈頭位で行うことによ り,胸を張るような動きになり頭部操縦機能である 頭部から胴体への伝導が途切れ,宙返り局面への移 行がスムーズに行えなかったと考えられる.また,
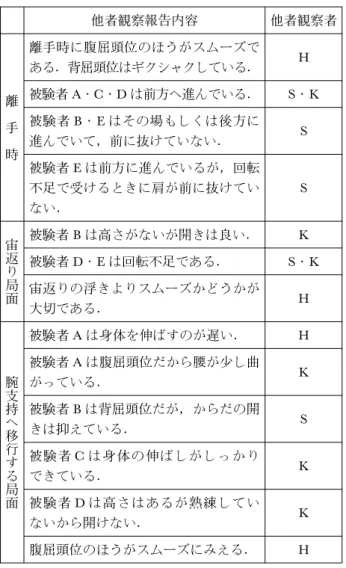
表 4 男子体操競技一種公認審判免許有資格者 3 名 による他者観察報告 他者観察報告内容 他者観察者 離 手 時 離手時に腹屈頭位のほうがスムーズで ある.背屈頭位はギクシャクしている. H 被験者 A・C・D は前方へ進んでいる. S・K 被験者 B・E はその場もしくは後方に 進んでいて,前に抜けていない. S 被験者 E は前方に進んでいるが,回転 不足で受けるときに肩が前に抜けてい ない. S 宙返 り局 面 被験者 B は高さがないが開きは良い. K 被験者 D・E は回転不足である. S・K 宙返りの浮きよりスムーズかどうかが 大切である. H 腕支持へ移行す る 局面 被験者 A は身体を伸ばすのが遅い. H 被験者 A は腹屈頭位だから腰が少し曲 がっている. K 被験者 B は背屈頭位だが,からだの開 きは抑えている. S 被験者 C は身体の伸ばしがしっかり できている. K 被験者 D は高さはあるが熟練してい ないから開けない. K 腹屈頭位のほうがスムーズにみえる. H 表 5 宙返り局面における回転時の頭位 被験者 0° 90° 180° 270° 360° 450° 540° 腕支持に 移行する局面 A 正頭位 腹屈 腹屈 腹屈 腹屈 腹屈 正頭位 腹屈 B 正頭位 腹屈 腹屈 腹屈 背屈 背屈 背屈 背屈 C 正頭位 腹屈 正頭位 背屈 背屈 背屈 背屈 背屈 D 正頭位 背屈 正頭位 背屈 背屈 背屈 背屈 背屈 E 正頭位 背屈 腹屈 腹屈 正頭位 正頭位 腹屈 腹屈 他者観察報告においても被験者 D・E は回転不足で あると報告している. 2) 宙返り局面における頭位について 宙返り局面において90°回転するごとの局面を抽 出し,宙返り局面における頭位の違いを観察した. 表 5 は宙返り局面における回転時の頭位を90°ご とに表にしたものである.宙返り局面における回転 時の腰の高さは平行棒のバー上から腰点までの距離 を高さとした. 被験者 A は上体傾斜角度 0°時には正頭位,90°か ら 2 回目の宙返りの 5/4 回転である450°まで腹屈頭 位,3/2回転である540°の時に正頭位であった.腰 の高さは 1 回目の宙返りの3/4回転時である270°時 が最も高く,80 cm であった. 被験者 B は上体傾斜角度 0°時には正頭位,90°か ら 1 回目の宙返りの3/4回転である270°まで腹屈頭 位,360°から540°の時に背屈頭位であった.腰の高 さは 1 回目の宙返りの3/4回転時である270°時が最 も高く,72 cm であった. 被験者 C は上体傾斜角度 0°時には正頭位,90°の 時には腹屈頭位,180°の時には正頭位,1 回目の宙 返りの3/4回転である270°から 2 回目の宙返りの3/2 回転である540°まで背屈頭位であった.腰の高さは 1 回目の宙返りの3/4回転時である270°時が最も高 く,84 cm であった. 被験者 D は上体傾斜角度 0°時には正頭位,90°の 時には背屈頭位,180°の時には正頭位,1 回目の宙
返りの3/4回転である270°から 2 回目の宙返りの3/2 回転である540°まで背屈頭位であった.腰の高さは 1回目の宙返りの3/4回転時である270°時が最も高 く,83 cm であった. 被験者 E は上体傾斜角度 0°時には正頭位,90°の 時には腹屈頭位,180°の時には背屈頭位,180°から 1回目の宙返りの3/4回転である270°まで腹屈頭位, 360°から 2 回目の宙返りの5/4回転である450°まで 正頭位であった.腰の高さは 1 回目の宙返りの3/4 回転時である270°時が最も高く,67 cm であった. 被験者 E は450°~540°の間の局面において宙返り 局面から腕支持に移行しており,宙返り局面におけ る回転時ではないため,被験者 E の540°時の腰の 高さの計測は行わなかった. 離手時の頭位を腹屈頭位で実施していた熟練者で ある被験者 A・B・C は90°~270°まで被験者 C の 270°を除いて腹屈頭位で実施していた.離手後,1 回転目の宙返りがはじまる局面において腹屈頭位で 実施することにより,上体を丸めることができ,か かえ込み姿勢をより小さくし,回転効率を上げてい ると考えられる. かかえ込み姿勢で小さくなり,回転効率を高める ためには,頭部操縦機能である頭部から胴体への伝 導により離手後,1 回転目の宙返りがはじまる局面 において腹屈頭位で実施することが効率よく宙返り をするための技術ではないかと推察される.このこ とは 2 回宙返りを行うという運動形態の技である平 行棒における懸垂前振り後方かかえ込み 2 回宙返り 腕支持(ベーレ)の研究を行った冨田ら11),つり輪 における後方かかえ込み 2 回宙返り懸垂(グチョ ギー)の研究を行った斉藤ら10)の先行研究と一致す るものであった. 平行棒において「ドミトリェンコ」と同じように 後方に 2 回宙返りを行い腕支持体勢に移行する技と して,両棒での支持前振りから行う後方棒上かかえ 込み 2 回宙返り腕支持(モリスエ)や,両棒での長 懸垂前振りから行うベーレは支持,または懸垂から 2 回宙返りを行うため,宙返り局面での高さを十分 に出すことができるが,「ドミトリェンコ」は平行 棒に上腕をかけた腕支持体勢から 2 回宙返りを行う ため,モリスエやベーレに比べると宙返りの高さを 出すことが困難である. 全被験者とも 1 回目の宙返りである270°の局面が 全被験者とも最も高かった.被験者 C が84 cm と最 も高く,被験者 E が一番低い結果となった.しか し,全体としてみると,被験者 E が極端に低かっ たものの,それ以外の熟練者,未熟練者においても 大きな差は見られなかった.このことから「ドミト リェンコ」は宙返りの高さを求めるのではなく,い かに効率よく宙返りをするかということが重要にな ってくると考えられる. 3) 宙返り局面から腕支持に移行する局面につい て 図 4 は宙返り局面から腕支持に移行する局面の図 である.また,上腕が平行棒に触れた局面を腕支持 に移行する局面とした.図 5 は宙返り局面から腕支 持に移行した後,肩・腰点を結んだ線が水平になっ たとき(630°回転時)の図である. 被験者 A は宙返り局面から腕支持に移行する局 面の頭位は腹屈頭位であり,身体はほぼ真っ直ぐに 伸ばした姿勢であった.また,肩・腰点を結んだ線 が水平になった630°回転時には完全に身体を伸ばし た姿勢であった.また,その姿勢は一直線であっ た.また,腹屈頭位であった. 被験者 B は宙返り局面から腕支持に移行する局 面の頭位は腹屈頭位であり,膝・股関節に屈曲がみ られるもののその後,630°回転時には完全に身体を 伸ばした姿勢であったが,腰が反った姿勢であっ た.また,背屈頭位であった. 被験者 C は宙返り局面から腕支持に移行する局 面の頭位は背屈頭位であり,身体はほぼ真っ直ぐに 伸ばした姿勢であった.また,630°回転時には完全 に身体を伸ばした姿勢であったが,腰が反った姿勢 であった.また,背屈頭位であった. 被験者 D は宙返り局面から腕支持に移行する局 面の頭位は背屈頭位であり,膝・股関節が大きく屈 曲した姿勢であった.また,630°回転時には,膝・ 股関節が大きく屈曲した姿勢であった.また,背屈
図 4 宙返り局面から腕支持に移行する局面 図 5 630°回転時 頭位であった. 被験者 E は宙返り局面から腕支持に移行する局 面の頭位は腹屈頭位であり,膝・股関節が大きく屈 曲した姿勢であった.また,630°回転時には,膝・ 股関節が大きく屈曲した姿勢であった.また,腹屈 頭位であった. 熟練者である被験者 A・B・C は630°回転時に身 体はほぼ真っ直ぐに伸ばした姿勢であった.しか し,腹屈頭位で実施していた被験者 A は身体が一 直線の姿勢であったが,背屈頭位で実施していた被 験者 B・C は腰が反った姿勢であった. 未熟練者 D・E は頭位の違いがみられたが,宙返 り局面から腕支持に移行する局面,また肩・腰点を 結んだ線が水平になった630°回転時に膝・股関節が 大きく屈曲した姿勢であった. 2006年版採点規則8)から平行棒特有の欠点に「宙 返り技でバーを握る前に体の伸ばしが見られない」 という項目が追加され,その減点は0.1~0.3までと なった.すなわち,宙返り局面から腕支持に移行す る局面は「ドミトリェンコ」の出来栄えの評価とし て非常に重要な局面であり,かかえ込み姿勢から身 体を伸ばし,腕支持に移行することが不可欠となっ てきている. 運動の局面構造からすると,宙返り局面から身体 を伸ばし,腕支持に移行する局面は,「ドミトリェ ンコ」の終末局面であるが,そのあとに続けて行う 前振り上がりという技の準備局面でもある.すなわ ち,運動の組み合わせの融合局面である.運動の先 取りとして身体を伸ばし,前振り上がりへのあふり の準備をしていることになる. 熟練者である被験者 A・B・C は宙返り局面の
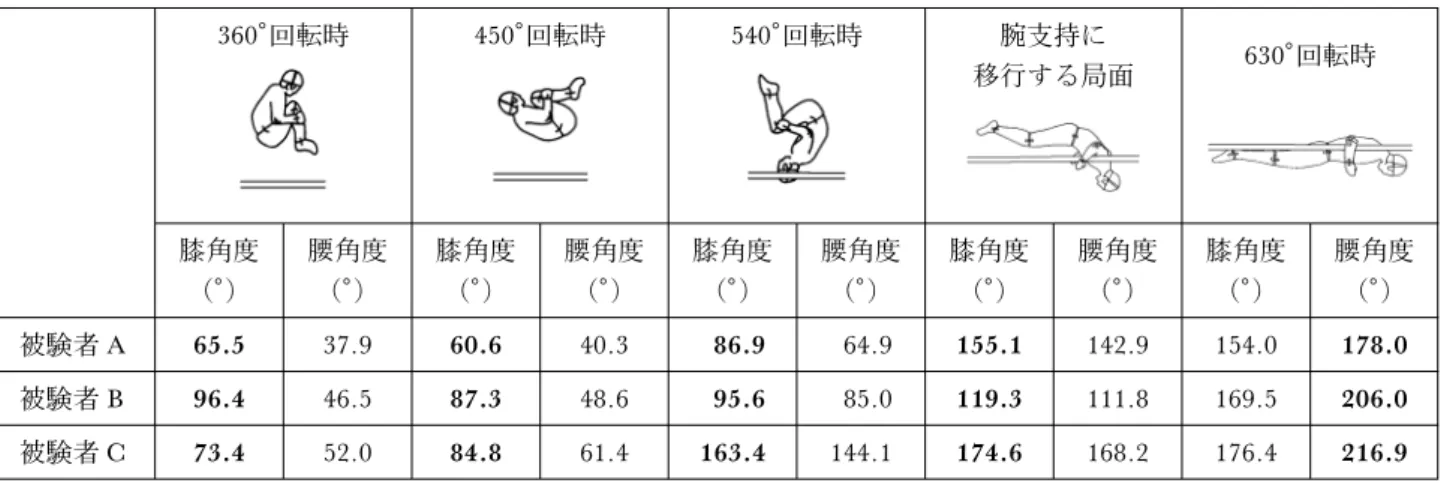
表 6 被験者 A・B・C の360°回転時から90°ごとの腰角度と膝角度 360°回転時 450°回転時 540°回転時 腕支持に 移行する局面 630°回転時 膝角度 (°) 腰角度 (°) 膝角度 (°) 腰角度 (°) 膝角度 (°) 腰角度 (°) 膝角度 (°) 腰角度 (°) 膝角度 (°) 腰角度 (°) 被験者 A 65.5 37.9 60.6 40.3 86.9 64.9 155.1 142.9 154.0 178.0 被験者 B 96.4 46.5 87.3 48.6 95.6 85.0 119.3 111.8 169.5 206.0 被験者 C 73.4 52.0 84.8 61.4 163.4 144.1 174.6 168.2 176.4 216.9 後,前振り上がりの先取りとして身体を伸ばしてい る.未熟練者である被験者 D・E は膝を大きく曲げ たまま腕支持に移行している. 自己観察報告の宙返り局面から腕支持に移行する 局面において,被験者 A は真下(地面の方向),被 験者 B・C は水平方向(平行棒と水平の方向であ り,回転時では630°の方向)に身体を伸ばすと報告 している. 宙返り局面から腕支持に移行する際に,真上方向 である540°回転時に身体を完全に伸ばそうとした場 合,回転が十分でない状態で膝から手を離してしま うため,宙返りの回転が止まり,腕支持に移行した 際の衝撃が大きくなると考えられる. 運動流動の観点から真下,または水平方向に身体 を伸ばそうとすることにより,回転を止めることな く,流れるようにスムーズに前振りを行うことがで きたと考えられる. すなわち,真下,または水平方向に身体を伸ばす という報告は,宙返り局面から腕支持に移行する際 に,運動流動,運動の先取りの観点から身体を合目 的的に動かそうとする意識であると推察される. また,被験者 A・B は身体を伸ばす際に膝から下 を伸ばすと報告している.運動伝導の観点から胴体 から足への伝導となる.また,被験者 C は「しっ かり回してから胸をふくんだまま身体を真っ直ぐ開 く」と報告している.すなわち,熟練者は,腰を反 るのではなく,身体を真っ直ぐに伸ばして腕支持に 移行しようとしていることが伺え,腕支持に移行す る局面では腰は少し屈曲した状態である. 表 6 は熟練者である被験者 A・B・C の360°回転 時から90°ごとの腰角度と膝角度を表にしたもので ある. 熟練者である被験者 A・B・C 全員が360°回転時 から腕支持に移行する時までは,腰角度より膝角度 の方が大きく,630°回転時に膝角度より腰角度の方 が大きくなっている.すなわち,股関節の伸展より 先に膝関節の伸展を行うことによって,足から胴体 への伝導となり,回転を止めずに身体を伸ばすこと ができると考えられる.また腕支持に移行する際 に,回転を止めずに身体を伸ばすことによって,腕 支持への移行を流れるように行うことができ,運動 流動の観点から質の高い動きであると推察される. また,そのことが他者観察報告者によって高い評価 を得られたものと考えられる.しかし,被験者 B・ Cは背屈頭位で実施していたため,頭部操縦機能に より腰を反った姿勢になっている. 未熟練者である被験者 D・E は身体を伸ばすとい う意識は自己観察報告の中に含まれてはおらず,被 験者 D は「真下に脚を持っていく」と報告してい るが伸ばすという表現ではない.被験者 E は「脇 を絞めて受けにいく」と報告している. 他者観察報告者は被験者 D・E は回転不足であ る.また,被験者 D は高さはあるが,熟練してい ないから身体を伸ばせないと報告している.すなわ
ち,未熟練者はまだ身体を伸ばして腕支持へ移行す る段階ではないものと推察される. 一方,背屈頭位で実施していた被験者 B・C は, 頭部操縦機能により回転効率が低下したと考えられ るが,被験者 B は背屈頭位ではあるが,身体の開 きは抑えられている.被験者 C はしっかり身体を 伸ばすことができていると他者観察報告者が報告し ている. また自己観察報告において,身体を伸ばして腕支 持へ移行している熟練者である被験者 A・B・C は,身体を伸ばせない時との違いについて,高さや あふりの感覚的な違いによって判断すると報告して いる.すなわち,これまでの経験から身体を伸ばす か否かを判断していると考えられる. 宙返り局面から腕支持に移行する局面において頭 位の違いにより,身体を伸ばして腕支持へ移行でき るかどうかの違いはみられなかった.この違いは, 習熟度の違いによるものと推察される. 熟練者は宙返り局面から腕支持に移行する際に上 体を丸くしたまま,股関節の伸展より膝関節を先に 伸展させることにより,身体を伸ばして腕支持へ移 行することができ,運動伝導,運動流動,運動の先 取りの観点から合目的的な動きであると推察される.
.
結
論
本研究により,「ドミトリェンコ」を実施する際 の技術として,次のことが示唆された. 1. 腕支持前振りから宙返り局面に移行する離手 時には,腹屈頭位で実施することにより,腕支 持から宙返り局面への移行をスムーズに行うこ とができる. 2. 宙返り後,腕支持に移行する際には,上体を 丸くしたまま,股関節より膝関節を先に伸展す ることにより,身体を伸ばして腕支持へ移行す ることができる. (当論文は,平成19年度順天堂大学大学院スポー ツ健康科学研究科の修士論文を基に作成されたもの である)文
献
1) 安達俊亨,斉藤卓,渡辺良夫(2002).平行棒にお ける「腕支持前振り後方かかえ込み 2 回宙返り腕支持」 の研究.研究部報,89, 3238. 2) 安達俊亨,佐野淳(2006).平行棒における「前振 り上がり後方屈身 2 回宙返り腕支持」の段階練習に関 する運動学的考察.スポーツ運動学研究,19, 5570. 3) FIG (2009) Code of Points 2009 Edition. Men'sTech-nical Committee of FIG.
4) 金子明友(1974)体操競技のコーチング.東京,大 修館書店,1822, 101106, 361376. 5) 加納 實,木下紘一郎,原田睦巳(2009).採点規 則の改訂に伴う平行棒の演技構成に関する一考察,順 天堂スポーツ健康科学研究,1 (13), 4862. 6) Meinel, K. (1974).マイネル・スポーツ運動学. 金子明友訳,1,東京,大修館書店,146197. 7) 日本体操協会(1997).第 2 回東アジア競技大会 腕 支持前振り~後方かかえ込み 2 回宙返り腕支持.研究 部報,79, 10. 8) 日本体操協会(2006).採点規則 男子 2006年版. 東京. 9) 日本体操協会(2009).採点規則 男子 2009年版. 東京. 10) 斉藤良宏,加納 實,原田睦巳(2008).つり輪に おける「後方かかえ込み 2 回宙返り懸垂(グチョギー)」 の回転技術に関する一考察.体操競技・器械運動研究, 16, 1728. 11) 冨田洋之,原田睦巳,伊藤政男(2007).平行棒に おける「ベーレ」の技術に関するモルフォロギー的一 考察.体操競技・器械運動研究,15, 2130. 平成22年11月27日 受付 平成23年 3 月 8 日 受理