理 学 療 法 学 第
32
巻 第7
号 416〜
422貝 (2005
年 )報 告
脳 卒 中片 麻 痺 患者
に お
け
る
Functional
Reach
Test
と
片脚
立
位 保 持 時 間
の
測
定
の
意
義
歩行 能力
と
の
関係
に
着 目 し
て
*一
藤 澤 宏 幸
1)#武
田
涼 子
1)前
田 里
美
2)早 川
由佳
理
2)要 旨
本 研 究の 目 的 は
,
脳卒
中 片 麻痺
患 者 に お け る 立 位バ ラ ンス指 標 間
の関係
お よ び 立 位バ ラ ンス能力
と 歩行
能
力
との関係
を明
ら かに し,
臨床
におけ
るFunctional
Reach
Test
(
FRT
)
と片 脚
立位 保 持 時 間測 定
の意
義
を検 討 す
ることであ
る。
対 象
は脳 卒 中 片 麻 痺 患 者
27
名 (
年 齢
67
±ユ1
歳 )
で,
左片 麻 痺
16
名
,
右 片 麻
痺
n
名
であ
っ た。測 定 項 目
は麻 痺 側 片 脚
立位 保 持 時 間 (
OFS
−
as)
,
非 麻 痺 側 片 脚
立位 保 持 時 間 (
OFS
−
ss)
,
FRT
,
10
m 歩行
テ ス トで,
相 関係 数
お よ び3
次 元散 布 図
を 用い て測 定
項 目間
の デー
タ の関係
を検 討
し た。
結 果
,
FRT
,
OFS
−
as,
OFS
−
ss問
で は 全て の関 係
で非 線 形
の有 意
な相 関
があ
っ た(
pく0
,
01
)
。
ま た,
OFS −
as は 重 複 歩距 離 (
ρ≡
0
.
81
,
p <0
.
01
) お よ び最
大歩 行
速 度(
ρ=
O
.
76
,
p<0
.
01
)
との関係
で 高い非
線 形の相 関 が あっ た。
結 論 と して,
FRT
が25
cm 以 上 可 能 な グルー
プに は 非 麻痺
側で麻 痺 側の機 能 低 下 を 補 償 してい る群と, 両 下 肢の機 能 が良
好 な 群の2
群の存 在
する こ とが 明 ら かとなっ た。
また, 最 大 歩 行速 度 を
1.
Om ・
s−
1以E
に改 善
さ せ る た め に は,
麻痺
側 片 脚 立位 保 持 能 力
を高
め る 必要性
のあ るこ と が 示 唆 さ れ た。
キ
ー
ワー
ド片 脚
立位
,
機 能 的
リー
チ,
歩 行
は じ め に脳 卒 中 片麻 痺
患者
の立位
バラン ス能 力
は歩 行 能 力
との関 係
におい て重 要であ り,
その評
価に関
してい くつ かの臨 床 評 価 指 標
が出
さ れている1−
7〕。
し か し な が ら,
そ れ ら評価 指 標
の持
つ 意味
につ い て詳 細
に検 討
し た報 告
は 少 ない。
ま た,
立位
バ ラ ン スの臨床
評 価 指 標 と しては 片 脚 立位 保持
t−
5,お よ びFunctional
Reach
Test
(
FRT
)6)7)が
多 用
さ れてい る が,
歩行 能 力
との関係
は 必ず
し も 明確
では ないtt
*
STgni[icance of FunctionaL Reach Test and Onc
−
footcd StandingDuration in Hemiptegia: Retationship betwccn Balance and
“
’
aLking AbiLitiesD
東 北 文 化 学 園 大学 医 療 福 祉 学 部リハ ビ リ テー
ショ ン学 科 〔〒 981−
8551宮 城県 イ「[1台 市 青 葉 区 国 見 645−
1}HirDyuki Fujisawa
.
RPT、
PhD、
Ryoko Takeda,
RPT,
MS :Department of Rehabilitation
,
Faculty〔
,
f Medicu 且Science andWelfare
,
TohQku Bunka Gakuen University2) 公 立 刈田総 合 病 院リハ ビ リ テ
ー
ショ ン科Satomi Maeda
,
RPT,
Yukari Hayakawa,
RPT 二Departmenr ofRehabilitation
,
Kattu Public Hospital#
E
−
mail:fujisawa@rehab.
tbgu.
ac.
jp
〔受 付日 2005年4月28冂
.
受 理目 2005年9月10囗)片
脚 立位
保 持 は 囗 的 論 か ら すると 静 的バ ラン ス に分 類 さ れ,
お も に 足関節
の動
的 制 御 に よっ て 側方
の安
定 性 が維 持
さ れ てい る8−
ll)。
し か も,
安定
性
に寄
与
す る内
返 し外
返 し 運 動の周 波 数 は2Hz
以L
にも 及ぶ高い成 分 を含
み9),
脳 卒 中 片麻 痺
患者
に おいては分 離
運動
が 十 分 に 可 能で も,
その よ う な 足 関 節 での速い運 動 が 出 来 ず に 片 脚 立 位 保 持 が 困 難 な 場 合 も あ る。
この よ う に,
パ フ ォー
マ ン ス テス トと しての片 脚
立位 保
持時 間
の測 定 は 立位
バ ラ ンスを 評 価 す る と 同 時 に,
関節 機
能 と し て は特
に 足 関 節 機 能 を 評 価 して い る と 考 え ら れ る。
ま た,
脳 卒 中 片 麻痺
患 者 で は 片 脚 立 位 保持 能 力
が 麻痺
側・
非 麻 痺
側とも
に低
下す
る場 合
が多
い、Fugl
−
Meyer
ら 5} は,
脳 卒 中 片 麻
痺 患 者
に お いて片 脚
立位 保 持 時 間
が良 好
であるとす
る基準
を麻 痺
側・
非 麻 痺
側 と もに10
秒
以 上 と して い る。
し か し,
その基準
や麻 痺
側・
非 麻 痺
側の片
脚 立位 保 持
能力
の関係
につ い て は 十 分に検
討
さ れていない。
・
方
,
FRT
は 前 後 方 向の動 的 立 位バ ラン ス 指 標 と し て用
い られており
,
高 齢 者
で は歩 行 能 力
との有 意
な相 関
が報 告
さ れ て い る6♪。
さ ら に,
FRT
は前 方
へ の足 圧中
心の移 動
量 との相 関
も ある と さ れ7〕,
前 方
へ の リー
チ が脳 卒中 片 麻 痺 患者における FunctionaL Reach
Test
と片脚 立位保 持 時 間の測 定の 意 義 417大 きい ほ ど足
関節
で発
生しな け
れ ばならない筋
トル クも 大 きく
なり
,
より良 好 な 足 関 節 機 能
が必要
と なる。
ま
た,
脳
血管 障害 患 者
を含
む対 象者
に対
して個 別
の理 学 療 法 を
実 施
し た結 果
,
坐位
バ ラ ン スな
どの運 動
スキルやFIM
(
Functional
Independence
Measure
)の変 化 とFRT
の変 化 と
の間 に有 意
な 正の相
関 が あっ た と報 告
さ れてい る 12,/
t た だ し,
FRT
は 高 齢 者の立 位バ ラン ス評 価 指 標 として開 発 さ れ た た め,
脳 卒 中 片 麻 痺 患 者の よ う に 左 右非
対称 性
を 示 す 対象
者 で は どのよ う な 意味
を 持つ のか,
十分
に検
討
さ れて い ると は言
い難
い 。以 ヒの論 点 か ら
,
そ れ ぞ れの評価 指 標
の特 徴
を考 慮
し,
多
次 元 的に測 定 値
を評 価 す
る ことに より
,
臨 床
上有 益
な視 点
が得
られ るロ∫能 性 が ある。
そこ で,
脳 卒 中 片 麻 痺患
者にお ける片 脚 立 位 保 持時 間
(麻 痺
側・
非 麻 痺 側 )
とFRT
との関係
,
さ らにそ れ ら 立位
バ ラ ン ス評 価 指 標
と 歩 行 能力
との関係
を明
ら か に し,
臨床
に おけるFRT
と 片 脚 立 位 保 持 時 間 測 定の意 義 を 検 討 する こ と をH
的 と し て 以 下の 研 究 を お こ なっ た。
方
法
1
.
対 象
対
象
は 装 具 お よ び 歩 行 補 助具
を使
用 せず
,
独 歩
がll]’
能
な 脳 卒 中 片 麻痺
患者
27
名
(年 齢
67
±1
ユ歳
,
身 長
1
,
56
±0
.
10m
.
体
重59
.
4
土11
.
7
kg
,
BMI
24
.
3
±32
) と し た、
,
診 断名
は脳 梗 塞20
名
,
脳
内 出 血7
名
で,
左片 麻
痺
16
名
,
右 片 麻 痺
n
名
,
発 症 か ら の 日数
は平均
38
日(
8
−
146
日)
であり
,
全員
が宮 城 県 南 部
の基 幹 病 院
に入
院
し てい た。ま
た,
ド肢
Brunnstrom
stagel3 ) はV
:4
名
,
VI
:23
名
,
Barthel
Indexi
一 は94
±9
(範 囲
:
60
−
100
)であ り,
表 在
お よ び深 部 感覚
が脱 失
して い る者
はい な かっ た
。
被験 者
には実験
に対 す
るト分 な説 明
を行
い,
書 面に て承 諾 を 得 た、
,
2
.
片 脚
立位 保 持 時 間 (
one−
footed
standingduration
) 被 験 者 は 裸 足 お よ び 開 眼に て立 位 と な り,
合 図 と と も に片 足
を支持 脚
に触
れな
い よう
上げ
た。 こ の際
,
両 側
ヒ肢
は体
側に沿
っ て自
然に お ろ し た肢 位
とし,
挙
L
側の ド 肢につ い ては 特に肢 位 を 規 定 し な かっ たu 片 脚 立 位保 持
時 間
は,
足底
が離 床
し再
び接
地す
る まで の時 間
と し た、 測 定 時 問 は30
秒 を ヒ限 と して,
これ を 越 え た場
合 は 測 定 を 終 了 し た。
測 定 は,
麻 痺 側 片 脚 耐 立保 持 時 間(
OFS −
as)
,
非 麻 痺 側 片 脚
立位 保 持 時 間 (
OFS
−
ss> とも
に3
副 実施
し,
最 大値
を採
用 した。
3
.
Functional
Reach
Test
(
FRT
)
6〕被 験
者
は 裸 足に て床
上の ラ イ ン に左右
のつま先
を含
わ せて立っ た。
その際,
ス タンス は肩 幅
と一
致
さ せ た。
さ ら に,
可 能 な 限 り直
立姿 勢
を とり
,
非 麻 痺 側 肩 関 節 を
90D
屈 曲 し,
肘 関 節 伸 展 位,
前 腕 回 内 位に てf’
指 を屈 曲
し た。
検
者 は手
指の先端 位 置
を計 測
したのち
,
被験 者
の非 麻 痺
側肩
関節
の高
さで 水 平 に 固 定 したメジャー
に沿
っ て前 方
に 出 来 る だ け リー
チ す る よ う指 示 し,
最 大 限リー
チ し た状態
で 再び手 指
の 先端
位 置 を 計 測 した.
FRT
の測 定 値
は開始 肢 位
と終
r
肢 位
の計 測 値
の差 と
した、
測 定
は3
回行い,
平 均 値
を採
用 し たn4
.
10m
歩 行
テ ス ト歩 行 路
は10m
と し,
その前
後 に各 3m
の助 走 路 を設
けた。 また,
10rn
歩 行 路 にス ター
トラインとゴー
ルラ イン.
さ ら に 助 走 路の始 ま り と終 わ りに 補 助ラインをつけ
た。被 験 者
に は助
走 路の始 ま り に あ る 補 助ラインに立 ち,
合
図と同 時に 16m 先の 補 助ラインまで llf能
な 限り
速 く歩 く
よう指
示 し た。
10m
歩 行
の 所 要 時 間 は 肩111筆が ス ター
トラインを 超 え た 時 点 か ら,
ゴー
ル ラインを 超 え た時 点
まで とし て計
測し た,歩 数
は スター
トラインを 踏 む か越 え
た時 点 を基 準
(始 点
) と して,
次
の接
地 か ら カ ウ ン トを開始し,
ゴー
ルラ イ ン を踏む か越え るまで (終点 )
カ ウ ント した、
,
そ
の際
,
始 点
と終 点 を
マー
クし,
修
正 した歩 行 距 離 を求
め た。
検 者
は3
名 と
し,
始点
お よ び終 点
のマー
ク,
歩 数
の カ ウ ン ト,
所 要 時 間の計 測 を そ れ ぞれ担 当
し た。
10m
の 所 要 時 問 か ら 歩 行 速 度 を,
歩 数 およ び所 要 時
間 か ら歩 行 率
を,
歩 数 と そ れ に 対 す る 歩行
距 離か ら重複 歩 距 離 を それぞれ、il』
算 し た、
、
測 定 はlll
・1
と し た。
5
.
統G
[一
角皐†斤各 指 標
の IE規 性
に つ い て は1
標 本
Kol
【nogorov−
Smirnov
検 定 を
用い て検 討
し た。指 標
間の相 関 関 係 を 検討
’
す
る にあ
た り,
正 規 分布
の指
標 問 につ い てはPearson
の積 率 相
関係 数
〔r)と加 齢
の影 響
を 検 討 す る ため に 偏相 関 係 数 (
制 御 変 数
:年齢 ) を
,
その他
の指
標 問 につ い て はSpearman
の順位
相 関 係 数 (ρ) を 用いた。
ま た,
OFS
−
as とOFS
−
ss の 比較
に はWilcoxon
検
定を適 応 した。
さ ら に
,FRT ,
OFS −
as,
OFS −
ss,
歩 行
指 標の 間の デー
タ構
造を検
証 す る た め,
3
次 元 散 布 図 を 利 用 し た。
統 計学 的 有 意 水 準
は5
% とし,
デー
タ は平 均値
と標準
偏 差で示
し た。解 析
にはSPSS
12
,
0J
(
SPSS
Inc.
)を
用い た。
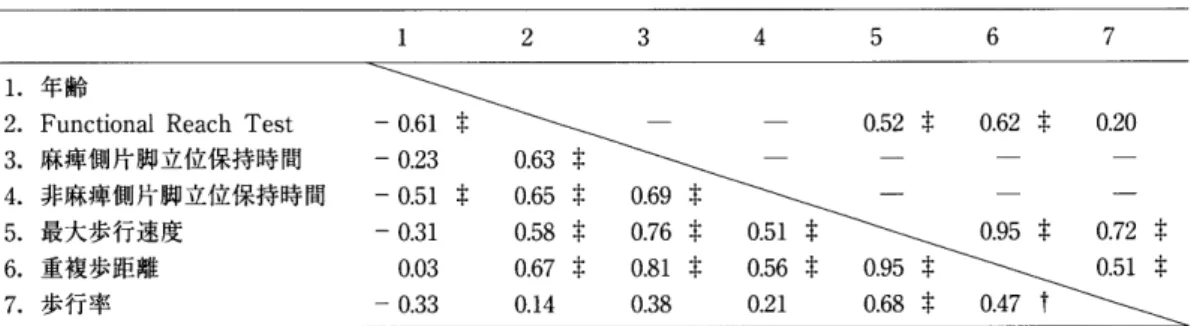
結
果 ユ.
各 指 標
の測 定 値
表
1
に各測 定値
を示
した。
各 指 標
の分 布
塑の検 定
結 果 か ら,
OFS
−
as,
OFS −
ss 以外
は 正 規分 布
と みな
さ れ た 。FRT
は23.
4
±8.
2
cm,
OFS −
as はユ2
,
7
±12
.
9
s 〔中 央 値
4,
5s
),
OFS −
ss は17
.
0
±13
.
O
s (巾 央値
19
.
3
s ),
最 大 歩
行 速 度 はLIO
‡0
.
41
m・
s−
1,
重複 歩 距 離
は ユ.
08
±0.
33m ,
歩 行 率
は ユ20,
7
±15.
9
step・
min−
1 で あっ た。418
理 学 療 法 学 第32
巻 第7
号表
1
バラン ス能力 お よび歩 行 能 力の測 定 結 果平 均 中 央値 標 準偏 差 最 小 値 最大 値
Functiona
且Reach
Test
cm麻 痺側片脚 立位保 持 時 間*1
s
非
麻痺
側片
脚立位保持時
間*Is 最 大 歩 行 速 度m
・
s−
1 重 複 歩距離 m 歩 行率
step
・
min−
⊥23
.
412
,
717.
01.
101
.
08120
.
724
.
8
4.
519.
31.
101
.
08121
.
9
8
.
212
.
913
.
00
.
410
.
3315
,
9
4
.
90
,
00
.
00
.
400
.
5074
.
9
34
.
530
.
030
.
02
.
20180144.
5
*lWi [coxon 検 定の結果,
非 麻 痺 側 片 脚 立 位 保 持 時 間は麻 痺 側 片 脚 立 位 保 持 時 間 と比 較 して有 意に長 かっ た (p<
0
.
05
).
表2
各 指 標間の相関係 数1
2
3
45
6 7 左 下 段 :Pearson
の積 率 相 関係 数 (3
,
4
以 外の指 標 間) また はSpearman
の順位 相 関係 数(
3
,
4
と他の指標
間)
.
右上段 :偏 相関係 数 (制 御 変 数 :年 齢 ),
†:p<0
.
05
,
‡:p< 0
.
01.
ま た,
OFS
−
ss はOFS
−
as よ り も有 意 に大 き かっ た (p〈0
,
05
)
。2
.
指 標 間
の相 関 関係
表
2
に指 標 間
の相 関 係 数
を示
し た。
OFT −
as お よ びOFT
−
ss が 正規 分 布
と は み な さ れ な かっ たので,
そ れ ら と他
の指 標
との関係
につ い てはSpearman
の順 位 相 関 係数
を用
い,
偏 相 関 係 数
は求
め な かっ た。
年 齢
と有 意
な相 関
を示
し たの はFRT
とOFS −
as であ
り
,
歩 行
能 力 と は 有 意 な 相 関 を 示 さ な かっ た。
FRT
が 最 も 高い相 関 を 示 した のは重 複 歩 距 離
であ り
(
r=0,
67,
p 〈0,
01
)
,
OFS −
asと も
同程 度
の相 関 を示 し
た (ρ≡
O
.
63
,p
〈0.
0
ユ)
。
OFS −
as は重 複 歩 距 離
と高
い相 関
を示
し(
ρ≡0,
81
, p 〈0.
Ol
)
,最 大 歩 行 速 度
とも良
好
な相
関 を 示 し た(
ρ=O.
76,
p
〈0,
01
)
。OFS −
ssはFRT
との 相 関 が 最 も 高 かっ た(
ρ=
O,
65,
p
〈O
.
Ol
)
。最
大 歩 行 速 度は重 複 歩 距 離
と高
い相
関 を示
した(
r=
0
.
95
,
p
<0.
01
)
。ま た
,
各
バ ラン ス指 標
と歩 行 率
の間
に は有
意 な相
関は み ら れなかっ た。3.
測 定 値
の3
次 元構 造
FRT
・
OFS
−
as・
OFS
−
ss の関 係
で は,
FRT
が25
cm を超
える とOFS
−
as お よ びOFS
−
ss も 急 激 に 上 昇 す る が,
そ
の中
にはOFS
−
ss のみ高
い 群 と,OFS −
ss・OFS −
as とも
に高 値 を 示 す
2
群
が存 在
し た(
図
1
)
。
重複 歩 距
離・
FRT
・
OFS
−
as の関係
で は,
重複
歩距
離 とFRT
が 高 値 30血 25.
O3200
挈
、5m匿
Oto Ω SA0 ρF
’
」
.
/ 〜 丶’
〆
/°
.
.
”
’
1齟
.
.
ζ
…、
.
丶
丶丶
七
. .
∫1’
/〆
丶 〜裂
1}
ノ 丶.
’
〜r
,
.
.
’
/’
.
.
ヤ
.
.
/
・
’
’
”
幽
.
η
.
.
.
、
旨
.
1七
”
∫
猷
劃
L
on IOΩ 恥 饐噛 砺 ’・螺
籀
●
7b8
藍戛
黙
30n ‘Oo ψ●
φ
o●
○
●
9
●
o●
.
0、
0ooぷ
50〆
5ρ 0ρゆ
0.
O図
1Functional
Reach
Test,
麻 痺 側 片 脚立位 保 持 時 間(
OFS
・
as), 非 麻 痺 側 片 脚立位 保 持 時 間 (OFT−
ss)の3 次 元 散 布 図 を 示 す群
はOFS −
asも大 き
い こ と が示 され
た(
図
2
)
。・
一
方,
重 複 歩 距 離・FRT ・OFS−
ssの関係
で は,
図
2
と は 異 な り重 複 歩
距離 と
FRT
の関 係
におい て中 間 層
の群
が加
わっ てい た(
図
3
)
。ま た
,
重 複 歩 距 離
・
OFS
・
as・
OFS
−
ss の関 係
で は,
重 複 歩 距 離
が低 値
の群
で はOFS
−
as・
OFS
−
ss も と も に低 値 を示
し,
1
.
Om
付 近
にな
る とOFS −
ss のみ高 値
を示 す
群 が み ら れ た (図4
)
。
しか し,
それ らOFS
−
ss の み高 値脳 卒 中 片 麻痺 患 者に おける
Functional
Reach
Test
と片脚 立位 保 持 時間の測 定の意 義419
30.
e250ε
2紅゜ll
ls.
。記
OIO.
e50e.
O.
.
,
F−」
.
」
」
甲
會
ll
00 o.
40.
6 ・1
訟
乱晶
1.
4 奮6 ‘顕り 1 君 n¢ 。 oρ “
譜
,説
蔚
図2
重 複 歩 距 離 (stride
length
>,
Functional
ReachTest
,
麻 痺 側 片 脚 立 位 保 持 時 間 (
OFS
−
as)の3
次 元 散 布 図 30S25sε
20 血等
15・匿
01005.
0o 」〕.
/
」
”
L F1
』
、
■
.
丶ヤ
.
叉.
’
.
甲
o∬ 0、
4o β ・:
ニ
ポ
ニ
晶
1、
4甸
怖 1.
8n讖
揮
図3 重 複 歩 距 離 (stride
length
),
Functiona
]Reach
Test
,
非 麻 痺 側 片 脚立位 保 持 時 間 (
OFS
−
ss)の3
次 元散
布 図 を 示 す群
で は 重複 歩
距 離 は変 化
せず
,
OFS −
as・OFS −
ssと も
に高 値 を 示 す 群
で再 び重 複 歩 距 離
の増 加
が み ら れた
(図4
)。
最 大 歩 行 速 度・OFS −
as・OFS −
ssの 関 係 に おい て も,
最
大歩 行
速度
1
.
Om ・
s−
1付
近 を 境界
と して 同様
の こ と が み ら れ た(
図5
)。考
察
本 研
究
に お け る 対象者
は,
独 歩
が 可能
であ
ること を 条
件 と し た た め,
下 肢Brunnstrom
stage でV
か らW
に属
す る 回復
段 階の高いグルー
プ で あっ た。
しか し,
結 果
と して バ ラン ス 指 標 お よ び 歩 行 指 標の測 定 値の範 囲 は 広 く,
今 回 用い た 回 復 段 階の評 価スケー
ル だ けで は 立 位バ ラ ン ス能 力
お よ び歩 行 能力
を把 握 す
るのが難
しい こと を len25n 遡 G ρ 05
0 ユ
ロ
ロ
(
腕
)
醜
甲 硫 」 O 5.
o00 00 図4重複 歩 距 離
Cstride
length),
非 麻 痺 側 片 脚立位 保 持時 間 (OFS
−
ss ),
麻 痺 側 片脚 立 位 保 持 時 間 (OFS
−
as)の3
次 元 散 布 図 3e.
e25.
eO P ◎ 05
0 ま
じ
じ
(
脆 )擁
6−
硫 』 O 5002 oo図5
最 大 歩行 速 度 (maximum watking velocity )
,
非 麻痺 側 片 脚 立 位 保 持 時 間 〔OFS
−
ss ),
麻 痺 側 片 脚 立 位 保 持 時 間 〔OFS
−
as)の3
次元散 布 図示
している。指
標 問の相 関 関 係で は,
OFS −
as が 重 複 歩 距 離 や 最 大歩行 速 度
と高
い相 関 を 示 し, 麻痺
側へ の1
分 な荷
重 やバ ラン ス能 力
が歩 行 能 力
と 関係 す
る こと がわか る。ま
た,
次
元を変
えて み る と相
関係 数
だけで は理解
で き ない情報
を 得
ること
が口∫能
であ
っ た。
FRT ・OFS −
as・OFS −
ss の 関係
で は,
FRT
が25
cm 以 上 の グルー
プに はOFS
.
SS のみ高
い群
と,
OFS
−
SS・
OFS −
as とも
に高
い群
のあ
るこ と が明
らか
にな
った
。FRT
で25
cm という
数値
は,
41
歳
か ら69
歳
までの標
準値
6)の下 限に“
U
,,
【け
る。
その意 味
で,
今
回対 象
と した回 復段 階
の高
い脳 卒 中片 麻 痺 患 者
に おい て は,
非 麻 痺 側
420
理 学療法
学第
32
巻第
7
弓・
で麻 痺 側
の機 能 低
下を補 償
し て正常 範
囲 ま で前
方
ヘ リー
チ動 作 を 行い得 るこ とを 示 してい る。
別の 言い方 をす る ならば,
FRT
は麻 痺 側
の ド肢 機 能 を 直接
反映
する もの ではな く
,
補 償 を含
め た身体 全体
の機 能 を
反映
し てい る と考 え
られる。一
方
,
リー
チの高
さ を 指定
し ない場 合,
リー
チ動 作
に は運動
戦略
と して股 関 節 屈 曲・
足 関 節 底 屈運 動
に よ る股 関 節 戦 略
など複 数
の戦 略
のあ ることが知
ら れてい る 15)。
さ ら に,
異 な る 戦 略 を とっ て も 同 程 度の リー
チ が可能
であ
る ことも報 告
さ れ てい る。
しか し,
本研 究
で実 施
した
よう
に高
さを指 定
し た場 合
に は 股 関節
戦略
の み で の遠 方
へ の リー
チ は困難
であ り,
ある程 度 遠 方 ヘ リー
チす
るため に は最 終 的
に足
関節 背 屈
運動
を とも
なう前 方
へ の重心 移 動
が必 要
と考 え
ら れる。 た だし
,
左 右
の荷 重 分 布
につ い て は多 様
な状 態 を取
り得
る と思われ,
FRT
が25
cm 以 上 でOFS
−
ss の み高
い群
は非
麻痺
側へ の荷 重 を増 し
て適応 し
ている ロ∫
能 性
があ
る 。・
方
,
FRT
が25
cm未 満
の グ ルー
プ に おい て は,
OFS
−
ss・
OFS
−
as とも
に低
f
直
であ
る場 合
が 圧倒 的
に多
い。 し た がっ て,
そ
の場 合
に は両 側
の足 関節 機 能
が 不十
分
であ り
,
股 関節 戦 略
を中心
に リー
チ動 作
をお こなっ て い るロf
能性
が高
い と推 察
さ れ る。 た だし,
こ れ ら の こ と を明確
にす
るため に は,
今 後 運 動 学 的
お よび運 動 力 学 的
検 討
が必要
であ
る。次
にFRT
・
重複 歩 距 離
・
OFS
−
as の関係
で は,
FRT
と重複 歩 距 離 が 高 くな
る とOFS −
asも高 値 を示 す
こと
が 明らかとなっ た。一
方
,
FRT
・
重 複
歩 距 離・OFS −
ssの 関係
をみ ると,
FRT
と重 複 歩 距 離
の関係
に おいてOFS
−
ss の良 好 な 中 間
の群
が加
わ る。FRT
と重 複 歩 距 離
は線
形
の相
関 関係
を示 す
が,
OFS
−
ss が高 値
でOFS
−
as が低 値
を示 す
群 はFRT
が増
力II
して も 重 複 歩距 離
は変化
せず
,
線 形
の相 関
を弱
め る要 因
と して作 用
して い る。 こ の こと は図
4
を見
る とよく
わかり
,
OFS
−
ss は重複 歩 距 離
が1
.
0
m付 近
で増 加 す
る が,
重複 歩 距 離 自体
は変化
し ない。
再
び重 複 歩 距 離 が 増 加 す
る の はOFS −
ss・OFS −
as とも
に高 値 を
示す 群
で ある。
こ れ よ り,
重 複 歩
距離
が1
.
Om
以 上へ改 善 す
る た め に はOFS
−
as が重要
な因子
であ
る こと
が理 解
でき
る。また
,
以
一
ヒ
の こ と は最 大 歩 行 速 度
に お いても
成り
、Z
ち,
1
.
Om
・
s−
1付
近にOFS
−
ss の み高 値
を 示 す 群 が あ り,
1
.
O
m・
s−
1以 上で はOFS
−
ss・
OFS
−
as と も に高 値
を示
す 群 が あ る。
健 常 者
に お け る 歩 行 速 度の増 加には 立 脚期
に お け る 十 分 な 足 関節 底
屈 運動 (
push
−
off)
に よ る推 進 力
が重 要
であ
る】620 )。
一
方
,
脳 卒 中片 麻 痺
患 者 で は, 足 関 節底
屈モー
メ ン トを 利 用 した 戦略
が 十 分 に 利 用でき
ない場 合
に は,
歩 行 速 度 増 加
の た め に股
関節
屈 曲モー
メ ン ト (pull−
off) を 利 用 す るこ と が 知 ら れて い る21.
2n〕。
こ の際, 歩行 速
度 が1
.
Om ・
s−
1前 後
ま で は 足 関節 機 能
の低
下 が あっ ても
股 関節
屈曲
モー
メ ン トを利
用 した戦 略で代 償で きる が,
それ 以 上 で は難
しい こ と が報 告
さ れ てい る25)26)。
今
回の結 果
は そ れ らの報 告
と一
致 してお り,
最 大 歩 行 速 度 ユ.
Om
・
s−
1以 上になるため に は 麻痺
側 足 関節
の ト分 な機
能 が 必 要 で あ るこ と を示
して いる。
脳 卒 中 片 麻 痺 患 者の立 位バ ラン ス能 力 を 検 査 し
,
結 果 か ら単
純 に 立 位バ ラン ス能 力 が 高いであ る と か低
い と表
現 し て も,
バ ランス能 力
低
下の要 因 と なっ てい る機
能 障 害 を 特 定 し たこと に は な ら ない。
使 用 し た 立 位バ ラン ス 評価
指 標の特 異 性 を 考慮
して, 可 能 な 限 り具 体 的 に 機 能障 害
を特 定
す ること が介
入のた め に 求 め ら れ る。
現在
,
バ ラン ス制 御の モ デル と し て はShumway
℃ook ら27〕 に よ る システ ム理論
が重
要 な位
置 を占
め てお り,
バ ラン スを維 持 す
るた
め に姿 勢
や動 作
に応
じた 運 動 戦 略
や感覚
戦略
が 取 ら れ てい ると考
え る。
その意 味 に おい て も,
運 動とバ ラン ス は 切 り離 して考
え
られ ない もので あ り28}, バ ラン ス障 害
の背 景
に は何
ら かの運動
調節
の問
題 があ
る こ とが多
い。
システム理
論
の立場
か ら する と,片
脚立位 保持
に おい て頭 部
・
卜肢
・
体 幹 (
HAT
) を安 定
させ るこ との でき
る条件
ドで は,
まず
足 関節
運動
に よっ て圧 中心 を 変 化
さ せ体 重 心
を一
定
の位 置
に保 持 す
る戦 略
が取
ら れ る。ま
た,
足 関 節
が十 分
に機 能
しな
い条 件
下で は,
股
関節 運動
に より体 重
の68
%を 占
め るHAT
を 制 御
し,
体 重 心 を
圧中
心
と・
致
させ てバ ラ ン スを維 持 す
る戦 略
が取
ら れ る2s〕。当 然
,
後 者
で は体 重 心
の動揺
が みら
れ,
結 果 と
し て片脚
立 位 保 持 時 間 も低
下 す るこ とにつ な が る。
前 方
へ の リー
チ動 作
につ いても
足 関節 底
屈モー
メ ン トを適切
に調節
でき
ない場 合
に は 股 関節 戦 略 を取 り
,
結 果 と
し て リー
チ距
離
が短 く
なると 思わ れ る。こ れま
で考 察
し てき
た よう
に,
足関 節 機 能
に注 目 する ことで脳 卒
中片麻 痺
患者
の立位
バ ラ ン ス能 力
と歩 行 能 力
との関係
を説 明
でき
るこ と は,
バ ラ ン ス評価 指 標
の測 定
の意 義
を考
え.
る ヒで重要
な示 唆
を与
えてく
れ てい る。
す
な わ ち,
使
用す
るバ ラ ンス評 価 指
標
の運 動 学 的 特 異性 を 考 慮 す
る ことで,
関節 運 動
の調 節
能
を 間接 的
に評価
し,
それ が動 作
に与
える影響
を検 討
でき
る可能性
を示
し ている か ら である。
今 後
,
足関節 機 能
に注 目
して運 動 学 的 お
よび運 動 力学 的 な検 討 を加 え
る こ とに よ り,
脳 卒 中 片 麻 痺
患者
にお けるFRT
と 片 脚 立 位 保 持 時 問の 測 定の意 義 を さ ら に 明 確 に 出 来 る もの と考 え る。
謝 辞
:本 研 究
の一
部
は文 部科 学 省研 究 費補 助
金・
若 手
研究
(
B
)(
課 題番 号
14770745
)
,
「
高 齢 障 害 者 転 倒
予防
の た めの立 位 側 方 重心 移 動 動 作 ト
レー
ニ ン グに関す
る基
礎 的 研 究 」 (研 究 代 表 者 :藤 澤 宏幸
) を受
けて行
われた。
記 し て謝 意 を表
します
。
Eva
i'
ptiti'
zzfi
,e.gC:
is
Ct6
Functional
!
et
1) Berg K, Wood-Dauphinee S, et al,/ The balancc scale:
Reliabi[ityassessment withelderly residents and patients with an acute stroke.
Scand
J
Rehab
Med
27:
27-36,
1995.2)
Berg
K,
Wood-Dauphinee
S,
etal.:Meusuring
ba[unce
inthe elderly: preliminary
development
of aninstrument,
Physiother
Can
41:304-311, 1989.
3)
TinettiME: Performance-oriented assessment ofty problems
in
elderly patients,J
Am
Geriatr
Soc
34: 119-126,1986.4) VeltasBJ,Wayne SJ,et al: One-leg balance
is
antant predictorof injuriousfallsinolder
persens.
J
Am
Geriatr
Soc
45:735-73S, 1997.5)
Fugt-Meyer AR,JaaskO
L,et al./ The post-strokeptegic patient. I.iX method
for
evalvation of physicalperformance,
Scand
J
Rehab
Med
7:
13-31,
1975.
6) Weiner DK, Duncan PW, et al./Functional
reach/A
marker of
physical
frailty.
J
Am
Geriatr
Soc
40[203-207,
1991.
7)
Duncan PW, WeinerDK,
et al:Functional
reach:A
new clinical measure of balance.J
Gerontol Med Sci 45/ M192-M197, 1990.8)
Tropp H, Odenrick P: Postural centrol in single-limbstance.
J
Orlhop
Res
6:
833-839,
1988.
9)
King
DL,
Zatsiorsky
VM/
Periods
of extreme ankleplacement
during
one4egged standing.Gait
Posture
l5:
172-179,
2002.
10} Hoogvliet P.Van Duyl WA, et al,/ A model forthe
tion
between
thedisplacement
of theankle and theterofpressure
in
thefrontal
plane,during
ene-leg stance.
Gait
Posture
6:
39-49,
1997.
11)
Davis
BL.
Grabiner
MD:
Mocleling effects of musclefatigue
on unilateral postural controLJ
Appl Biomech
!2i
173-184,
1996,
12)
Weiner
DK,
Bongiorni
DR, et al./ Dees functionalreach
improve
with rehabilitation?Arch
Phys
Med Rehabit 74: 796-800,1993.13)
Brunnstrom
S:
Motor testingprocedures inhemiptegia:based
on sequential recovery stages. Phys Ther 46:
357-375,
1966,
14)
Granger
CV,
Dewis LS, et al./ Stroke rehabititationiAnaiysis
of repeatedBarthel
Index
measures, Arch PhysReachTest
tH'
ma
Jlr/ft
zaWve
ua
a)ifie
-xEa).tX
421Med Rehabii
6e/
l4-l7,1979.15)
Wernick-Robinson
M,
et al,:Functionat
reach:Does
it
really measure
dynamic
balance?
Arch
Phys
Med
Rchubil
80,
262
269,
1999.
16)
Sutherland
DH/ An electromyographic study of thetar
fiexors
of the ankte innormal walking en thelevet,J
Joint
Bone Surg."Lm
48/66 71,1966.17)
)v'Iurray
MP,
Guten
GN,
et al./Function
of the triceps surae during gait.J
BoneJoint
Surg Ain 60/473 475.1978,
]8)
Sutherland
DH,Cooper
L,et al./ The rote ef the anklep[antarflexorsinnormaL watking.
J
BoneJoint
Surg Am
62i
354-363.
1980.
19)
Simon
SR,
Mann
RA,
et al,:Role
of the posteriorcalfmuscles in normal gait.
J
BoneJoint
Surg Am 60/
465-472,
1978,
20>
Winter DA/ Energy generation and absnrption at theankle and
knee
during
fast,
natural and slow cadences.
Clin
Orthop
Rel Res l75:147-154, 1983.21)
OIney
SJ,
RichardsC/
Hemiparetic gaitfollowing
stroke.
Part
I:
Characteristics.
Gait
Posture
4/
136-l48,
l996.
22.)Olney
SJ,
Griffin
MP, et al: TemporaL kinematic, and
kinetic
variables related to gaitspeedin
subjects withhemiplegia/ A regression approach. Phys Ther 74:
872-885,
1994.
23)
Otney
SJ,
Grienn
MP,
et al./Work
and powerin
gaitofstroke patients.
Arch
Phys
Med
Rehabil
72/309-314,
1991.
24) Perry
J:
The
mechanics of watkingin
hemiplegia.
Ctin
Orthe
Rel
Res
63:
23-31,
1969.
25)
Nadeau
S.
Gravel
D,
et al,:Dynarnometr{c
assessment ofthe plantarfiexors
in
hemiparetic
subjecrsrRelations
between
muscular, gaitand cUnical pararneters.Scancl
J
Rehab
Med
29:137-146,1997.26)
Nadeau
S,
Gravel
D.
et al:Plantarfiexor
weakness as a
limiting
factor
of gaitspeedin
stroke subjects ancl the compensaring role ofhip
flexors.
Clin
Biomech
14/
125-135,
1999,
27}
Shumway-Cook
A,
Woolacott
MH:
Motor
Control.
Theory
andPractical
Applicatiens,
2nd
ed,Lippicott
Williams
&
Wilkins,
Baltimore,
2001.
2s)
maieri
I,s'i uxvezc・:sc・ts'6raetuttaa)ges. pT v'422
mp\fiIX\
eg32Uas7e
<Abstract>
Significance
ofFunctional
Reach
Test
andOne-footed
Standing
Duration
in
Hemiplegia:
Relationship
between
Balance
andWalking
Abilities
Hiroyuki
FUJISAWA,
RPT,
PhD,
Ryoko
TAKEDA,
RPT,
MS
Dqpartment
ofRehabilitation,
thculty
ofMbdicalScience
andWleijlzre,
7bhoku
Bunka
Gakuen
U}tiversity
Satomi
MAEDA,
RPT,
Yukari
HAYAKAWA,
RPT
Departntent
ofRehabilitation,Kdtta
Public
Hospital
The
present study examined relationshipsbetween
balance
and walking abilities.Subjects
comprised27
patients
withhemiplegia
(age:
67
±11
years;
left-sided
hemiplegia,
n =16:
right-sidedhemipLegia,
n =11).
Dynamic
balance
abiLity was assessed using theFunctional
Reach
Test
(FRT),
while static
balance
ability wasdetermined
usingduration
of one-footed standingfor
both
the affected side{OFS-as)
and unaffected side{OFS-ss}.
Walking
abiLitywas assessedby
the
maximum walking speed, stridelength
and cadence.The
correlation coerncient andthree-dimensional
(3D)
scatterplot
were usedto
analyze relationshipsbetween
variables.Significant
correlations wereidentified
between
OFS-as
andOFS-ss
(p
=O.69,
p<O.Ol),
between
OFS-as
andFRT
(p
=O.63,
p<
O.Ol),
andbetween
OFS-ss
andFRT
(p
=O.65,
p<O,Ol), with2
groupsdisplaying
FRT
)25 cm: subjects withhigh
OFS-ss
values only, and subjects withhigh
valuesfor
both
OFS-as
andOFS-ss.
Moreover,
positive
non-linear correlations were notedbetween
OFS-as
and stridelength
(p
=O.81,
p<
![図 3 重 複 歩 距 離 ( stride length ) , Functiona ] Reach Test ,](https://thumb-ap.123doks.com/thumbv2/123deta/9872706.986197/4.892.85.421.100.405/図3重複歩距離stridelengthFunctionaReachTest.webp)
