歩行と発話が困難な障害者の
自立支援システムに関する研究
山梨大学大学院
医学工学総合教育部
博士課程学位論文
2015 年 3 月
庄司和晃
目次
第 1111 章 序論... 1 -1.1. 研究の背景と目的... 1 -1.1.1. 2.5 次元地図の生成... 3 -1.1.2. 視線日本語入力の効率改善... 4 -1.2. 研究内容... 4 -第 2222 章 2.52.52.52.5 次元地図の生成... 6 -2.1. 概要... 6 -2.2. 生成手法... 9 -2.2.1. 環境のスキャン... 9 -2.2.2. 段差の検出... 19 -2.2.3. グリッドマップの生成... 20 -2.3. 通路方位推定... 21 -2.3.1. 消失点の利用... 21 -2.3.2. エッジ検出... 23 -2.3.3. 植物箇所除去フィルタ... 25 -2.3.4. ハフ変換による交点検出... 27 -2.4. 通路方位の推定実験... 30 -2.5. 2.5 次元地図の生成実験... 33 -2.5.1. 実験概要... 33 -2.5.2. 使用機器... 34 -2.5.3. 実験結果... 37 -2.5.4. 考察... 41 -第 3333 章 視線日本語入力効率化... 44 -3.1. 概要... 44 -3.2. システム構成... 45 -3.3. ワードツリー... 46 -3.3.1. 特徴... 46 -3.3.2. 優先度の変動... 47 -3.3.3. ツリー構造と話題の深さ... 48 -3.3.4. データベース形式... 49 -3.3.5. 理論値評価... 51 -3.3.6. データベース編集ソフトウェア... 52 -3.4. シミュレーション実験... 53 -3.4.1. 実験概要... 53 -3.4.2. 実験方法... 53-3.5.1. 実験概要... 55 -3.5.2. 実験方法... 56 -3.5.3. 実験結果... 56 -3.5.4. 考察... 57 -3.6. 分類語彙表による実験... 58 -3.6.1. 実験概要... 58 -3.6.2. 実験方法... 59 -3.6.3. 実験結果... 59 -3.6.4. 考察... 62 -第 4444 章 結論... 64 -4.1. 提案手法について... 64 -4.1.1. 2.5 次元地図の生成... 64 -4.1.2. 視線日本語入力の効率改善... 64 -4.2. 総括... 65 参考文献... 68
-第 1111 章
序論
1.1.
研究の背景と目的
近年,日本では肢体不自由者の数が増加している.厚生労働省の平成 18 年調査[1] によると,現在 357 万人の障害者がおり,その中でも肢体不自由者は 181 万人いる. 脳疾患がある場合は,自分の意思による運動が不可能になる随意運動障害が大きな問 題となる.特に筋萎縮性側索硬化症 (ALS)の患者である場合,全身麻痺によって歩行 と発話が困難になる事例が多くある.最終的には,眼筋を除くほぼ全ての筋肉を動か せなくなり,支援が無い状態の自立的な生活は不可能と言える. このような背景があるため,肢体不自由者の生活支援を目的とした福祉機器やシス テムの研究は盛んに行われている.本研究室では,肢体不自由者の自立生活確立のた め,残存機能である視線を入力とした支援システムに関する研究を行っている.視線 入力装置による日本語文章入力を実現するシステムの研究では ,「山梨大学大学院医 学工学総合研究部工学系学域ヒトを対象とする研究に関する倫理委員会」の承認を受 けて,養護支援学校での使用評価実験を行っていた.そこでは,肢体不自由者は「移 動」と「コミュニケーション」が円滑に行えないことが,大きなストレスとなってい るという意見が得られた.本研究では電動車イスに搭載した視線入力装置によって, 安全で効率的な「移動とコミュニケーション」を実現するための二つの手法を示す. これらは,先行研究で課題となっている電動車イスでの安全性を向上させるための地 図生成手法と,視線による日本語入力の効率改善のための手法である. 本稿では,一つ目に,安全な移動を実現するためのシステムについて述べる.本研 究室の先行研究では,視線入力装置による電動車イスの操作における誤操作が起きに くいインタフェースが考案され,安全性が高い使用感を実現することに成功してい る.図1にインタフェース画面を示す.さらに現在,周囲の障害物を避けて経路生成 を行い,絶対に「ぶつからない」ことを目指すアルゴリズムの研究が行われている. これは,盲導犬に必須とされる「賢い不服従」と呼ばれる動作を実現するための研究 である.ただし,大きなストレスとなる比較的小さな段差(マンホールなど)を避けた 動作が必要となるうえ,円滑な操作の実現のためには障害物の位置をリアルタイムで 検出する必要がある.そのため,環境中に存在する障害物を予め地図情報として保有 し,移動経路計画に利用することが有効である.そこで,本稿では安全な移動経路計 画のための地図生成手法について述べる.この地図を 2.5 次元地図と定義する.電動 車イスの操作として,搭乗者は進行方向,または目的地のみを視線で入力するだけで 動作させることを目指す.すなわち,電動車イスの動作を半自律動作として考える. 二つ目に,視線入力による円滑なコミュニケーションについて述べる,本研究室の 先行研究により,三通りの日本語入力画面が考案され,使用者に負担の少ない日本語 入力画面の作成に成功した[2].図 2 に日本語入力画面を示す.しかし,肢体不自由者る情報や,周囲の情報を利用して,単語の予測変換を行なうシステムを提案する.周 囲の情報を取得するために,画像センサやマイクアレイといった各種センサを使用す る. 図 1-11-11-11-1 視線入力による電動車イスの操作インタフェース (a)ローマ字入力方式 (b)ポケベル入力方式 (c)五十音かな入力方式 図 1-21-21-21-2 視線入力による日本語入力画面
1.1.1.
2.5 次元地図の生成
近年の画像処理技術やロボット技術の発展は目覚しく,自律移動ロボットを利用し た人の生活補助を行うシステムの研究は各地で行われており[3],盲導犬ロボットのよ うな,障害者の自立した生活を支援するためのシステムの研究も行われている[4].し かし,このようなシステムで誤動作が起きた場合,人を巻き込んだ衝突や転倒などの, 事故に繋がる恐れがある.安全なシステムの構築のために,センサによる環境認識や 障害物を避けた動作は非常に重要であることが言われている. ある環境において自律移動ロボットを制御するには,環境中に存在する段差や,障 害物を考慮した移動経路計画が不可欠である[5][6].したがって,段差情報を含めな い 2 次元地図を移動経路計画に利用した場合,屋外環境では一般的に存在する段差の 存在が危険となる.特に,自律移動ロボットに搭載したセンサによって環境認識を行 う場合,微小な段差であっても取得データに乱れが生じ,ロバスト性が大きく損なわ れる. 環境の 3 次元地図を生成するために,光学式の距離センサであるレーザレンジファ インダを用いる手法や[7][8],画像センサを用いる手法[9],数値標高モデルを生成す る手法が提案されている[10].3 次元環境地図の生成システムは装置が大がかりにな ることが多く,UAV を用いて数値標高モデルを作成する場合は特にそうであり,一般 的な環境では使用が難しい.また,3 次元地図を自律移動ロボットの移動経路計画に 利用する場合,膨大なデータから危険な段差を判別する処理が問題となり,確実性と リアルタイム処理を両立する手法が必須となる. 本研究では,地図生成システムの汎用性を高めるために,自律移動ロボットに対し て俯角方向に固定した一つの距離センサによってロボットより低い位置の障害物を 検出する.生成する地図は壁や段差の障害物情報を記録したもので,これを本研究で は 2.5 次元地図とする. 提案する段差の検出手法は,電動車イスが通過できないような大きな段差だけでな く,通過するだけで電動車イスの挙動や搭乗者に悪影響を与えるような,微小な段差 も高精度で取得することを可能とする.微小な段差を避けた経路を自律移動ロボット に進行させることで,安全な経路計画を実現する. さらに,通路上を移動するシステムに即した実用性のある地図を生成するために, 画像センサを用いた環境認識によって通路方位推定を行う手法も提案する.これによ り,通路に沿って前進しながら地図生成を行うことを可能とした. 本稿では,これらの提案する手法を実装し,2.5 次元地図の生成実験を行った結果, 高精度かつ再現性を有した地図生成を実現したことを示す.1.1.2.
視線日本語入力の効率改善
ALS などの重度の障害を持つ場合,発話や書字といったコミュニケーションが困難 となる.これを解決するため,肢体不自由者の生活支援に関する研究は多く行われて おり[11],その中でも残存機能である視線による入力システムの研究は活発に行われ ている[12].入力の効率は言及されていない.視線入力による円滑なコミュニケーシ ョンを実現できれば,社会的に大きな意味を持つが,視線入力の困難さから現在まで 実装されていない.発話不可肢体不自由者の円滑なコミュニケーションを実現する意 義は非常に大きく,さらに,健常者の日本語入力システムへのフィードバックも大い に期待できる. 本研究で開発した視線日本語入力のシステムは,最終的には電動車イスに搭載し, 人とのコミュニケーションや,文書作成のために用いる. 単語のデータベースはツリー構造によるもので実装する.これにより,現在の話題 を中心とした語彙推定が可能となる.本稿では,シミュレーション実験によって,提 案するツリー構造データベースを利用した予測変換の有用性を示す.さらに,外部機 関によって公開されているデータベースを辞書として利用し,予測変換を行って評価 した結果を示す.これにより,PC で一般的に利用されている既存の予測変換システ ムとの比較する. 本研究は「山梨大学大学院医学工学総合研究部工学系学域ヒトを対象とする研究に 関する倫理委員会」の承認を得ている.1.2.
研究内容
本研究では,視線入力装置による円滑な「移動」と「コミュニケーション」の実現 を目指す.そのため,電動車イスに搭載した視線入力装置によってこれらを実現する. 先行研究では,電動車イスはヤマハ発動機株式会社製の JW アクティブが用いられて いる[13]. 搭乗者が移動を行いたいときは,図 1-1 で示す電動車イスの操作画面を提示し,視 線によって電動車イスを操作する.ただし,賢い不服従を実装した経路生成により, 安全な移動を実現する.本稿では,経路生成のための 2.5 次元地図作成の手法につい て述べる.日本語の入力を行いたいときは,図 1-2 で示す日本語入力画面を提示し, 文章入力する.本稿では,円滑な文章入力のための高効率な予測変換手法について述 べる.この二つは搭乗者が任意のタイミングで切り替えることができる.最終的には, 日本語入力で利用された情報を用いて,現在状況に合わせた目的地の候補を表示し, それを選択するだけで目的地への移動が可能なようにする. 先行研究との関連を図 1-3 に示す.黒枠が囲まれた領域が我々の研究室で行われて いる研究であり,赤枠で囲まれた領域が本稿で述べる研究である.視 線 入 力 装 置
電 動 車 イ ス
視 線 日 本 語 入 力
視 線 日 本 語 入 力
効 率 改 善
電 動 車 イ ス
操 作 画 面
経 路 生 成
( 賢 い 不 服 従 )
2.5次 元 地 図
安 全 な 移 動
円 滑 な
コ ミ ュ ニ ケ ー シ ョ ン
図 1-31-31-31-3 先行研究との関連第 2222 章
2.5
2.5
2.5
2.5 次元地図の生成
2.1.
概要
再現性を持つ地図生成を目的とするため,自律移動ロボットを利用する.自律移動 ロボットに距離センサと画像センサを取り付けて動作させ,2.5 次元地図を生成する. 本手法で動作する通路は,アスファルトなどで舗装された一般的な直線の道路を想定 する.画像センサによって,通路方向に真直することを目指す.自律移動ロボットの 動作は簡潔な支持情報で可能なように実装する.システム構成を図 2-1 に示す. 自 律 移 動 ロ ボ ッ ト 簡 潔 な 指 示 情 報 2....5 次 元 地 図 情 報 環 境 の ス キ ャ ン 通 路 方 位 推 定 距 離 セ ン サ L R F L R F L R FL R F 画 像 セ ン サ カ メ ラ ラ ッ プ ト ッ プP CP CP CP C 図 2-12-12-12-1 地図生成システムのシステム構成 2.5 次元地図の座標系の定義と,環境用語の定義を図 2-2 に示す.2.5 次元地図はグ リッド型のデータで表現する(以下,グリッドマップとする).x 軸,y 軸は地面と平 行な軸とし,x 軸はロボットの横方向,y 軸はロボットの奥行き方向となる.グリッドマップの原点は,自律移動ロボットが動作を開始した位置となる.グリッ ドマップ上には均等な大きさの領域が存在し,本研究ではこの領域をセルと定義す る.セルのサイズは,電動車イスの経路計画で考慮できる大きさならば十分であるが, 本システムでは地図生成時に任意の大きさに設定可能なように実装した. セルは,その座標に段差が存在するか,または段差が存在しないかの属性を有する. 段差が存在する場合の属性を段差属性,段差が存在しない場合の属性を非段差属性と する.セルの属性が,段差属性である場合は段差の高さの情報を保持し,非段差属性 である場合はロボットからの相対高さの情報を保持する.段差属性はさらに,通過不 可能段差と通過悪影響段差の二種類に細分類する.電動車イスが通過不可能である段 差を通過不可能段差とし,電動車イスが通過する際に搭載機器と搭乗者に悪影響を与 える段差を通過悪影響段差とする.段差の高さが閾値 th より高い場合は通過不可能段 差とし,低い場合は通過悪影響段差とする.高さ閾値 th は電動車イスの車輪径から判 断することが可能である.例えば,車輪直径の半分より大きい高さの段差は乗り越え ることはできないが,余裕を持たせた車輪直径 3 分の 1 を高さ閾値 th と設定する. 非段差属性は,凸平面,凹平面に細分類する.段差を隔て高い位置に存在する平面 を凸平面とし,凸平面の高さ以下である平面を凹平面とする.この区別は,段差属性 と同様に設定した閾値によって行う.セルが持つ情報による分類を図 2-3 に示す.図 中の h はセルが持つ高さ情報,th は段差の高さ閾値を示す.
セ ル
属 性
通 過 不 可 能 段 差 凹 平 面 凸 平 面非 段 差
段 差
・ 属 性
・ 高 さ
h < t h t h ≦ h h ≦ t h t h ≦ h 通 過 悪 影 響 段 差 図 2-32-32-32-3 閾値による各属性の判別2.5 次元地図の例を図 2-4 に示す.図中で黒は通過不可能段差領域,青は通過悪影 響段差領域を表し,白は通路平面,赤は凸平面を表す.また,未探査の領域は灰色で 表す. 2.5 次元地図は未探査領域以外を情報として保有するため,データサイズは LRF に よるスキャンが行なわれた範囲に依存する.このため,広範囲に渡って地図生成が行 なわれた場合でも,データサイズの大幅な削減が見込める.また,地図生成を行なう 際にセルのサイズを変更することで,データサイズの調節が容易である.ただし,セ ルのサイズを大きくした場合,地図の分解能は下がるため,データサイズと分解能は トレードオフの関係にある. 2.5 次元地図は生成の段階で段差を検出するため,段差箇所を明示して保存するこ とが可能である.図 2-5 は,図 2-4 の地図を同じセルサイズの数値標高モデルで表し たものである.ただし,図 2-5 では未探査領域はないものとする.2.5 次元地図は通 過悪影響段差のような細かな段差も情報として保有する.これにより,ロボットが通 過する際に悪影響を与えないロバストな経路計画が可能となる.
x
y
o
通 過 不 可 能 段 差 領 域 通 過 悪 影 響 段 差 領 域 非 段 差 領 域 未 探 査 領 域 凸 平 面 凹 平 面 図 2-42-42-42-4 座標系と環境用語の定義2.2.
生成手法
2.2.1.
環境のスキャン
本研究では距離センサとして LRF を使用する.LRF は,スキャン分解能ごとにレ ーザを照射し,周囲平面の物体までの距離を取得する.LRF の動作イメージを図 2-6 に示す. 図 2-62-62-62-6 LRFLRFLRFLRF の動作イメージ 本研究では,LRF を俯角方向に向くようにロボットに取り付けて動作させる.設置 角度とスキャン角度をそれぞれφset とφscan としたとき,得られた物体までの距離 l から,スキャン点の 3 次元座標 P(Px,Py,Pz)を式(1)~(3)で求められる.ただし,設置 角度φset は水平な地面となす角度とする.図 2-7 に座標系を示す. Px= l s in φs ca n (1)Py=lcosφsetcosφsca n (2)
より小さな段差を検出するために,隣接するスキャン点座標から高さ方向の分解能 (高さ分解能とする)を考慮することが重要である.高さ分解能は,LRF の設置角度, LRF から段差までの x 方向距離,LRF の機器仕様によるスキャン分解能で決定する. 段差へレーザを照射する様子を図 2-8,理論値を図 2-9 に示す.高さ分解能は,設置 角度が浅いほど良くなる傾向を示しているが,LRF のレーザが地面に届く範囲で設定 する必要がある.設置角度を 0 度とした場合,レーザは地面に当たらないため,理論 値は設置角度 0 度の場合を除く. LRF の機器仕様からスキャン分解能 0.36°でスキャン点が得られる場合,φscan を -90°から 90°まで変化させてスキャン点を得ると一度のスキャンで約 500 点の点群 が得られる.得られる点群を本研究ではスキャン点群とする. 図 2-82-82-82-8 段差へのレーザの照射 図 2-92-92-92-9 高さ分解能の理論値
LRF の設置角度によるスキャン点群の精度を検証するため,屋外環境で LRF によ るスキャン点群取得実験を行った. LRF の角度を 45°,30°,15°に設定し,それぞれでスキャン点群の取得した. 実験環境中に段差 a~f を設定し,実測高さと得られたデータから求めた高さを比較す る.また,通路平面の道幅と得られたデータから求めた道幅を比較する. 二通りの環境で実験を行う.実験環境をモデル化した構図を,それぞれ図 2-10,2-11 に示す.また,実験環境 A,実験環境 B の写真をそれぞれ図 2-12,2-13 に示す. 図 2-14,2-15 に取得したスキャン点群を示す. 図 2-102-102-102-10 実験環境 AAAA のモデル化 段差 e 通路 A 段差 f 段差 g 段差 i 段差 j 段差 k 段差 h(下り) 通路 B 段差 a 段差 b 段差 c(下り) 段差 d
正面 左側面 右側面 図 2-122-122-122-12 実験環境 AAAA の写真 段差 a 段差 b 段差 a 段差 d 段差 e 地点 P 段差 b 段 差 c( 下
正面 左側面 右側面 図 2-132-132-132-13 実験環境 BBBB の写真 段差 f 段差 g 段 差 h( 下 段差 f 段差 g 段差 i 段差 j 段差 k
(a) 45°での結果 (b) 30°での結果 (c) 15°での結果 図 2-142-142-142-14 実験環境 AAAA で取得したスキャン点群
a
b
c
d
e
LRF LRF LRF(a) 45°での結果 (b) 30°での結果 (c) 15°での結果 図 2-152-152-152-15 実験環境 BBBB で取得したスキャン点群
f
g
h
i
j
k
LRF LRF LRF結果の図より,上り段差 a~k に対応するデータが取得できていることがわかる. また,下り段差のある場所ではスキャン点が得られず,x 方向のデータ連続が途切れ るため,未探査領域となる. 段差 a~k の実測高さとデータから取得した高さ(実験値とする),及びその誤差を角 度ごとにそれぞれ表 2-1,表 2-2,表 2-3 に示す.ただし,下り段差はスキャン点が得 られないため,値を省略する.また,通路 A,通路 B の実測幅と取得した幅(実験値), 及びその誤差も示す. 表 2-12-12-12-1 角度 45454545°での取得した段差情報の評価
項目
実測値 [mm]
実験値 [mm]
誤差 [mm]
誤差 [%]
段差 a の高さ
120
115
5
4.2
段差 b の高さ
120
116
4
3.3
段差 d の高さ
120
110
10
8.3
段差 e の高さ
120
111
9
7.5
段差 f の高さ
100
95
5
5.0
段差 g の高さ
80
73
7
8.8
段差 i の高さ
120
113
7
5.8
段差 j の高さ
120
112
8
6.7
段差 k の高さ
120
112
8
6.7
通路 A の幅
3985
3994
9
0.2
通路 B の幅
3980
3940
40
1.0
表 2-22-22-22-2 角度 30303030°での取得した段差情報の評価
項目
実測値 [mm]
実験値 [mm]
誤差 [mm]
誤差 [%]
段差 a の高さ
120
120
0
0.0
段差 b の高さ
120
123
3
2.5
段差 d の高さ
120
116
4
3.3
段差 e の高さ
120
116
4
3.3
段差 f の高さ
100
95
5
5.0
段差 g の高さ
80
75
5
6.3
段差 i の高さ
120
114
6
5.0
段差 j の高さ
120
112
8
6.7
段差 k の高さ
120
115
5
4.2
通路 A の幅
3985
3962
23
0.6
通路 B の幅
3980
3938
42
1.1
表 2-32-32-32-3 角度 15151515°での取得した段差情報の評価
項目
実測値 [mm]
実験値 [mm]
誤差 [mm]
誤差 [%]
段差 a の高さ
120
120
0
0.0
段差 b の高さ
120
120
0
0.0
段差 d の高さ
120
118
2
1.7
段差 e の高さ
120
116
4
3.3
段差 f の高さ
100
98
2
2.0
段差 g の高さ
80
78
2
2.5
段差 i の高さ
120
116
4
3.3
段差 j の高さ
120
117
3
2.5
段差 k の高さ
120
117
3
2.5
通路 A の幅
3985
3951
34
0.9
通路 B の幅
3980
3995
15
0.3
実験結果より,取り付け角度 15°での結果が最も高精度であることを確認した.本 稿ではこれ以降,取り付け角度を 15°に設定した場合の手法を述べる.2.2.2.
段差の検出
得られたスキャン点群から段差の検出を行う.隣接する二つのスキャン点間の座標 変化を算出し,高さ方向に大きな変化があった場合,そのスキャン点間に段差が存在 する.座標差Δx とΔz から二つのスキャン点がなす角度θを式(4)より計算する.z
x
∆
∆
=
cos
−1θ
(4) 角度θがあらかじめ決定した閾値以上である場合に,このスキャン点間に段差を検 出する.この閾値は電動車イスの登坂能力から決定するべきであるが,本研究では車 輪移動系の登坂能力から,30°≤θ≤150°である場合に段差を検出するものとする. 同一セルの座標内に複数の段差が検出された場合,これを同一の段差としてまとめ, 段差を構成するスキャン点座標の z 値が最も低いものから最も高いものまでを線分で 結ぶ.本研究では,これを段差線データとする.図 2-16 左に検出した段差線データ, 図 2-16 右に段差箇所を拡大したスキャン点群を示す.図 2-16 左で,検出した段差線 データは緑色の線で表している. 図 2-162-162-162-16 実験環境 BBBB で取得したスキャン点群2.2.3.
グリッドマップの生成
スキャン点群の各スキャン点の座標を取得し,対応する座標のセルへ属性を割り当 てる.属性はスキャン点の特徴によって決定する.段差線データの底部(図 un 中の A, C,E)と対応する頂部(図中の B,D,F)の間に存在するスキャン点の場合,セルへ段 差の属性を割り当てる.段差線データの長さより,システムが通過可能な高さの段差 であるかを判別する.高い段差の場合は通過不可能段差領域とし,低い段差の場合は 通過悪影響段差領域とする.段差線データを構成しないスキャン点の場合,セルへ非 段差領域を割り当てる.あるセル座標に相当するスキャン点がない場合,その座標は 未探査領域であるため,情報が存在しない. 探査領域が広く,データが大きな地図になる場合,構成されるセル数は膨大となる. この場合,セル数に応じて領域探査にかかる時間が増大してしまうため,地図を複数 の領域に分割し,領域ごとに探査するようにして処理時間の短縮を図る.領域が大き い順にエリア,ブロック,セルとする.一度の動作開始から停止までで取得できる全 体の領域をエリアとし,エリアは複数のブロックから構成される.ブロックは複数の セルから構成される. ブロックの大きさは,包括する最大セル数(以後,包括セル数)とセルサイズによっ て決定する.この値はそれぞれ任意に設定可能である.ただし,包括セル数は x 方向 と y 方向でそれぞれ設定する.包括セル数が x 方向 y 方向ともに 20,セルサイズを 100 mm 四方とすると,一つのブロックは 20×100=2000 mm 四方の座標領域を表すこ とになる. ブロックが持つ情報は,原点を中心としたエリア内での座標と,ブロックが含有す るセルの情報である.セルの情報は,そのブロックを基準としたセルの座標となる. 領域の探査は,探査したい座標に相当するセルを検出しなければならない.そのた めには,まずセルがどのブロックに含まれているかを算出する.探査したい座標を含 むブロックを探査し,ブロック内の該当するセルを探査する.セルに保存する情報は, ブロック内の x 座標,y 座標,z 要素である.z 要素は,段差である場合その高さが代 入され,非段差である場合はその座標地点の高さを表す. 2.5 次元地図のファイルはヘッダー部とデータ部で構成される.ヘッダー部では, mm 単位で指定するセルサイズと,一つのブロック領域に格納するセル数を設定する. データ部は,各ブロックの座標とそのブロックが含むセルの情報が一つのまとまりで 記述されている.エリアは,複数のブロックの記述から構成される.2.3. 通路方位推定
2.3.1.
消失点の利用
カメラによって環境の撮影を行うと,三次元立体情報は二次元平面情報へと投影さ れる.その際,撮影点からカメラ光軸方向の遠方にある物体ほど縮小して投影される. 例えば,通路に沿ったガードレールや物体を撮影した場合,それらは遠方になるほど 縮小して投影され,画像中のある一点で収束する.消失点の原理を図 2-17 に示す. (a)カメラ光軸と消失点が一致する場合 (b)カメラ光軸と消失点が不一致の場合 図 2-172-172-172-17 消失点の原理 光軸 消失点 光軸 消失点環境画像の消失点から通路方位を推定する手法は,Lutton らによって提案されてい る[14][15].消失点の座標から,画像センサの光軸に対する通路方位を推定すること が可能である.本研究では,通路方位に沿って前進するために,パン方向のみを注目 する.実装のための処理手順は以下の通りである. (1) 画像センサによる画像取得 (2) 取得画像からエッジ情報を取得 (3) エッジ情報に複雑箇所除去フィルタを適用 (4) エッジ情報から Hough 変換[16]によって直線を検出 (5) 検出直線から消失点を推定 カメラ光軸と消失点が一致する場合,カメラは通路方位を向いていると言える.本 研究ではこれを利用し,画像中で消失点を検出することで通路方位推定を行う.
2.3.2.
エッジ検出
画像センサによって取得した画像から,エッジ情報の取得を行なう.これにより, 縁石やガードレールといった画像中で通路方位に伸びる直線成分を強調して検出す る.エッジ情報の取得のためにソーベルフィルタが利用されることがある [17][18]. 通路方位に伸びる直線成分は,画像中で斜め方向に大きな勾配強度を持つエッジ情報 として現れるため,本研究では斜め方向の勾配強度を得るソーベルフィルタを用い る.ただし,ソーベルフィルタの適用前に前処理として,取得画像に対してグレイス ケール化と中間値フィルタの適用を行なう.また,ソーベルフィルタによって得られ た勾配強度情報に対して,大津の手法[19]用いた二値化を行なう.これにより,斜め 方向のエッジ情報を検出する. 処理を行う前の画像例を図 2-18,処理を行った後の画像を図 2-19 に示す.グレイ スケール化した画像を図 2-19(a),検出したエッジ情報を図 2-19 (b)に示す. 図 2-182-182-182-18 通路環境の例(a)グレイスケール化後の画像
(b)エッジ検出結果
2.3.3.
植物箇所除去フィルタ
画像中に植物や看板の文字などの複雑なエッジ情報が存在した場合,直線成分を得 ることが困難なことがある.例として,図 2-18 の通路中央に存在する街路樹などが 該当する. 複雑なエッジ情報は,狭い領域にエッジ情報が多数存在する箇所である.最小値フ ィルタの適用によって,このような箇所を減少させることは可能である.しかし最小 値フィルタによって,通路方位に延びる直線要素のエッジ情報まで除去してしまう恐 れがある.図 2-20(a)に 3×3 の最小値フィルタを適用した結果を示す.図 2-20(a)より, 通路方位に延びるエッジ情報も削除されてしまうことがわかる. 画像中から複雑なエッジ情報のみを除去するフィルタを実装した.画像を局所領域 に分割し,領域内でエッジ情報の割合が大きい場合,その領域内で 3×3 の最小値フ ィルタを適用する.このフィルタにより,複雑なエッジ情報のみを除去することが可 能である.画像を縦横それぞれ 40 分割して局所領域とし,局所領域内でエッジの割 合が 10%以上の場合に最小値フィルタを適用した結果を図 2-20(b)に示す.(a)最小値フィルタの適用結果
(b)複雑箇所除去フィルタの適用結果
2.3.4.
ハフ変換による交点検出
Hough 変換によって得られた直線について,それぞれの交点を求める.Hough 変換 により求めた直線と元画像を図 2-21 に示す.
図 2-212-212-212-21 HoughHoughHoughHough 変換による直線の検出
Hough 変換による直線の交点は,交点を構成する複数の直線の傾きと,画像上での 座標を情報として持っている.ただし,直線の傾き情報は 0°から 180°の間で八方 向に量子化された値である.量子化の概念図を図 2-22 に示す. 図 2-222-222-222-22 直線の傾き情報の量子化 10° 60° -45° 0 1 2 3 4 5 6 7
量子化値
量子化前の傾き画像を局所領域に分割し,領域内に存在する交点の情報をまとめた交点グループを 作成する.交点グループは局所領域の中心に作成し,内包する交点の数と内包する交 点の傾き情報を有する.図 2-23 に交点グループの様子を示す. 交 点 交 点 グ ル ー プ 傾 き 情 報 局 所 領 域 図 2-232-232-232-23 交点グループの作成 交点グループの中で最も多くの異なる傾き情報を持つ交点グループを消失点とし て推定する.ただし,この条件を満たす交点グループが複数存在した場合は,内包す る交点数の多い交点グループを消失点として推定する.図 2-24 では,赤から緑の点 が交点グループを表している.交点グループは,赤から緑になるにつれて内包する交 点数が多いことを示している.また,推定した消失点は黄色の丸で囲まれた箇所であ る.
画像中央と消失点の x 座標の差Δx,画像横幅の画素数w,画角φから,通路方位θは 式(5)で求められる ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ =tan−1 tanφ w lx a Δ (5) 画素数wと画角φは画像センサの機器仕様に依存するが,Δlxの分解能は局所領域の 分割数に依存する.局所領域の分割数が増加するほど分解能が良くなるが,検出する 交点グループ数が増加するため,処理時間は増大する.画像を縦横にそれぞれ 50 分 割,100 分割,200 分割して局所領域とした際の分解能の理論値を図 2-26 に示す.横 軸は画像中央と消失点の x 座標の差を表しており,縦軸は推定角度の分解能を表して いる.図 2-25 より,分割数が増加するほど分解能が良くなるが,分割数の増加 に伴 って処理時間は増大する.本稿の実験では,100 分割を使用する. 画像中央とのx座標差 [px] 0 2 0 0 4 0 0 6 0 0 8 0 0 - 2 0 0 - 4 0 0 - 6 0 0 - 8 0 0 0 1 2 3 5 角 度 分 解 能 [ ° ] 5 0 分 割 1 0 0 分 割 2 0 0 分 割 図 2-252-252-252-25 通路方位推定の分解能
2.4.
通路方位の推定実験
図 2-26 に示す環境で通路方位推定を行った.画像の通路方位(y 方向)に 25m の間, 2.5m 間隔 11 箇所で画像を取得し,通路方位推定を行う.複雑箇所除去フィルタを適 用する場合としない場合で通路方位推定結果を比較し,有用性を考察する.検出は Hough 変換閾値を変更しながら行い,画像中央に最も近いものを採用する. 画像センサとして Sony 社製のデジタルビデオカメラ HDR-CX430V を使用する. HDR-CX430V は画角 66.5°であり,オートホワイトバランス,オートフォーカスを 搭載しているため,屋外での動画像処理に適している.取得する画像のサイズは 640x360 とした. 図 2-262-262-262-26 通路方位推定の実験環境実験結果を図 2-27 に示す.横軸はカメラ光軸に対する通路の推定方位を表してお り,縦軸はカメラの y 方向の設置位置を表す.青点は複雑箇所除去フィルタを適用し ていない結果であり,赤点は複雑箇所除去フィルタを適用した結果である. 複雑箇所除去フィルタがない場合は,検出点が画像中央から大きく外れることが多 い.これは図 2-28(a)に示すように,環境中の植物によって得られるエッジ成分が画像 左方向に集中していることによる.図 2-28(b)のようにフィルタを実装した場合では, 植物のエッジ情報が削除されており,目的の消失点を検出できていることが確認でき る. 通路の推定方位 [°] y方 向 カ メ ラ 設 置 位 置 [m ] フ ィル タあ り フ ィ ル タ な し 図 2-272-272-272-27 通路方位推定の実験結果
(a)複雑箇所除去フィルタの適用なし
(b)複雑箇所除去フィルタの適用あり
2.5.
2.5 次元地図の生成実験
2.5.1.
実験概要
実験条件を以下に示す. 環境:山梨大学構内 日時:(A) 2012 年 2 月 20 日 12:00~13:00 (B) 2012 年 2 月 22 日 16:00~17:00 日時(A)(B)のそれぞれについて 3 回の試行を行った.実験環境の写真を図 2-29 に示 す.経路は直進 20m となる. 図 2-292-292-292-29 地図生成の実験環境 路面はアスファルトであり,通路幅 4m の両側に縁石による通過不可能段差が存在 する.ただし,通路右側の段差は一部低くなっており,通過悪影響段差となる箇所が ある.また,通路平面に汚水枡やマンホールが存在し,そのいくつかでは微小な段差 が生じているため,通過悪影響段差となる箇所がある. 経路は建物の日陰となっているために,直射日光が当たる箇所は経路の終了地点付 近のみである.ただし,日時(B)の場合は実験時間が夕方のため,直射日光の影響は 限りなく小さい. 生成された地図と実環境を数値比較するため,環境中の複数の定点で固定した LRF でスキャンを行う.LRF は地面と垂直に設置し,得られたスキャンデータから特徴の 位置を確認して真値を得る.LRF はロボットに搭載するものと同等のものを使用し, ロボットの経路上で高さ 30cm の位置に設置する.2.5.2.
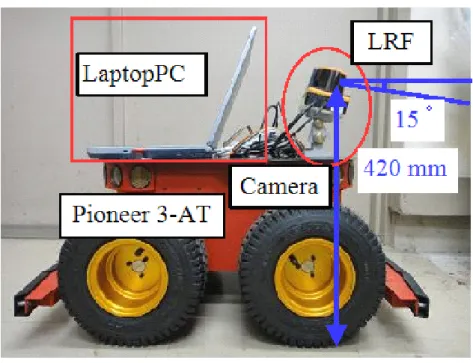
使用機器
環境を移動するロボットとして Mobile Robots 社製の Pioneer 3-AT を使用する. Pioneer 3–AT は四輪駆動の自律移動ロボットであり,屋外での動作に高い評価を得て いる[20].また,四輪それぞれにロータリエンコーダを搭載している.本実験ではロ ータリエンコーダによる推測航法を用いて,Pioneer3-AT の自己位置推定を行う.た だし,通路方位真直に動作する前提があるため, x 方向の情報は使用せず,y 方向の 情報のみを使用する.Pioneer3-AT の外観を図 2-30,主な仕様を表 2-4 に示す.
図 2-302-302-302-30 PioneerPioneerPioneerPioneer 3-AT3-AT3-AT3-AT の外観
表 2-42-42-42-4 PioneerPioneerPioneerPioneer 3-AT3-AT3-AT3-AT の仕様
項目 Pioneer 3-AT 全長 50.0 cm 全幅 49.3 cm 全高 27.7 cm 最低地上高 8.4 cm 質量 14 kg 最大積載量 30 kg 本体稼動時間 4~6 時間 車輪直径 21.5 cm エンコーダ分解能 500 p/r
27.7cm
27.7cm
27.7cm
27.7cm
49.3cm
49.3cm
49.3cm
49.3cm
50.0cm
50.0cm
50.0cm
50.0cm
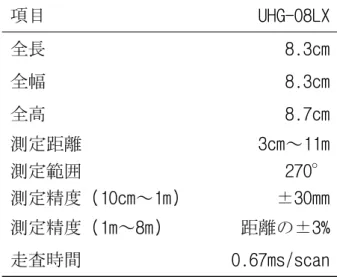
段差を検出する LRF は北陽電機社製の UHG-08LX を使用する.UHG-08LX は,周 囲平面 270°でスキャン分解能 0.36°ごとに物体までの距離を取得可能である.取得 距離の精度は,距離の±3%である[21].UHG-08LX は,高さ・幅・長さが全て 8cm 程 度であり,小型で軽量であることも特長の一つである.
LRF の外観を図 2-31,主な仕様を表 2-5 に示す.
図 2-312-312-312-31 UHG-08LXUHG-08LXUHG-08LXUHG-08LX の外観
表 2-52-52-52-5 UHG-08LXUHG-08LXUHG-08LXUHG-08LX の仕様
項目 UHG-08LX 全長 8.3cm 全幅 8.3cm 全高 8.7cm 測定距離 3cm~11m 測定範囲 270° 測定精度 (10cm~1m) ±30mm 測定精度 (1m~8m) 距離の±3% 走査時間 0.67ms/scan
8.7cm
8.7cm
8.7cm
8.7cm
8.3cm
8.3cm
8.3cm
8.3cm
8.3cm
8.3cm
8.3cm
8.3cm
通路方位推定のための画像センサは,4.4 節で使用したものと同様にして使用する. PC でリアルタイム処理を行うために,コンポジット映像信号から画像データに変換 し,使用した.取得画像サイズは 640x360,取得フレームレートは 30fps である.
図 2-32 に使用機器を Pioneer3-AT に搭載した全体の外観を示す.
2.5.3.
実験結果
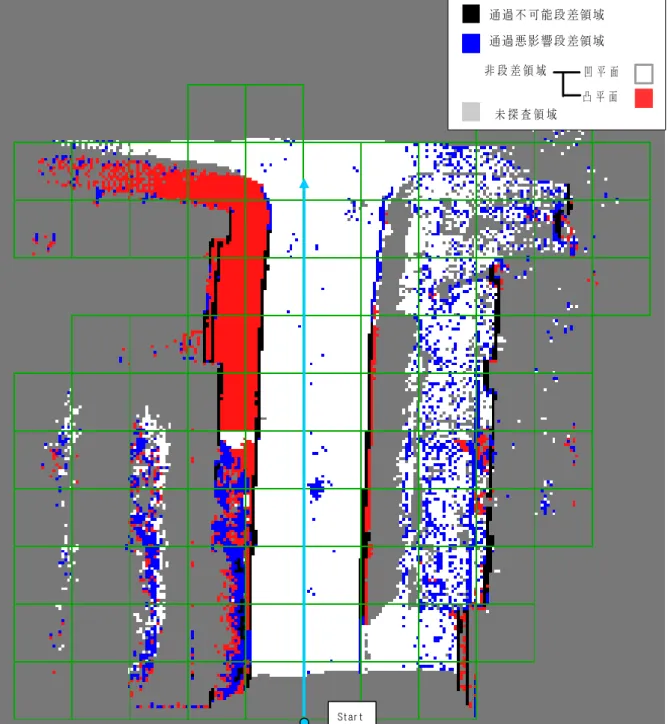
生成した地図を図 2-33,図 2-34 に示す.2.5 次元地図のセルサイズは 10cm 四方と した.ただし,日時(A)(B)における複数回の試行でほぼ同じ結果が得られたため,代 表的な結果をそれぞれ一つ示す.水色の矢印は自律移動ロボットが走行した経路を表 す. 図 2-332-332-332-33 日時 AAAA で生成した地図 通 過 不 可 能 段 差 領 域 通 過 悪 影 響 段 差 領 域 非 段 差 領 域 未 探 査 領 域 凸 平 面 凹 平 面 Start図 2-342-342-342-34 日時 BBBB で生成した地図 通 過 不 可 能 段 差 領 域 通 過 悪 影 響 段 差 領 域 非 段 差 領 域 未 探 査 領 域 凸 平 面 凹 平 面 Start
図 2-35 には,図 2-33 と図 2-34 に示した二つの地図について,段差領域の論理積を とったものを示す.さらに,実環境中にある特徴との比較も示す.図中で,緑色の枠 線は 2m の距離を表している.
図 2-35 で赤色の丸で囲った箇所は,環境中に特徴的な通過悪影響段差が存在する 箇所である.示した結果から,マンホールによる通過悪影響段差や,縁石が低くなっ ている箇所が通過悪影響段差として取得できていることがわかる.また,植物がある 箇所は通過悪影響段差として検出されている.これらのことから,自律移動ロボット が通過悪影響段差を避けた動作を実現することで,安全でロバストな動作が期待でき る. 図 2-35 に示す地点 A,B,C,D,E それぞれについて,生成地図における位置と取得した 実測値の比較を表 2-5 に示す.ただし,表中では地図から得た値を実験値としてある. 表 2-52-52-52-5 生成地図と実測値の比較 x [cm] y [cm] 実験値[mm] 実測値[mm] 誤差[mm] 実験値[mm] 実測値[mm] 誤差[mm] A -190 -190 0 200 200 0 B 40 40 0 800 800 0 C -160 -190 30 1270 1250 20 D 230 200 30 1380 1400 -20 E -110 -190 80 1790 1750 40
2.5.4.
考察
図 2-35 より,経路の左右両側 2m の地点で,縁石による通過不可能段差が取得でき ていることがわかる.しかし,表 2-6 では地点 C,D,E で x 方向と y 方向ともに誤差が 生じていることが確認できる.これは,ロボットが通路方位に対して左寄りの方位を 向いて進行してしまったことが原因である.環境奥側の通路が進行中の通路より左寄 りに向いているため,消失点が画像左方向にずれて検出された.この現象はロボット が進行するにつれて多く現れるため,得られる地図は経路の終了地点付近では右に曲 がってしまっている.図 2-36 に通路方位推定失敗時の画像を示す. 図 2-362-362-362-36 通路方位推定の失敗例 図 2-36 より,5m の地点では多く得られる奥行き方向のエッジ情報が,20m の地点 では得られないことがわかる.通路の分岐などでは段差やガードレールが途切れるた め,奥行き方向のエッジ検出が困難である.また,日光や街灯によって生じる影が, 通路方位とは無関係なエッジ情報となることがある. しかし,全ての試行においてこの現象が見られ,図 2-35 に示すとおり通過悪影響段 差を含むほぼ全ての段差について再現性のある検出ができている.表 2-5 に,実験で 生成した地図それぞれにおける通過不可能段差と通過悪影響段差のセル数を示す. 表 2-52-52-52-5 生成地図と実測値の比較 セル数 通過不可能段差 通過悪影響段差 日時 A での結果 (図 2-34) 801 2726表 2-5 より,論理積を取ったことによる段差セル数の減少は僅かであり,通過不可 能段差の一致度は 91.8%,通過悪影響段差の一致度は 74.9%であった.一致度は式(6) によって算出した.ただし,一致度を Matches,それぞれの地図の段差セルを CellCellCellCellA,
Cell Cell Cell CellBで表す. 100 × = A B A Matches Cell Cell CellCell Cell Cell Cell Cell Cell Cell Cell Cell ∩ (6) 図 2-37(a)に同じ日時同士で一致度を計算した結果を示す.また,同様にして図 2-37 (b)には異なる日時同士で一致度を計算した結果を示す.グラフの黒棒と青棒はそれぞ れ通過不可能段差と通過悪影響段差を表し,塗りつぶしの棒は日時(A)の結果,斜線 の棒は日時(B)の結果を表す. (a) 同じ日での比較 (b) 異なる日での比較 図 2-372-372-372-37 通路方位推定の失敗例 日時(A) 通過不可能段差 日時(A) 通過悪影響段差 日時(B) 通過不可能段差 日時(A) 通過悪影響段差 通過不可能段差 通過悪影響段差 日
図 2-38 より,通過不可能段差の一致度は 90%以上であり,同じ日で生成した 2.5 次 元地図同士では高い再現性が確認できた.また,通過悪影響段差の一致度は 80%前後 であるが,これは植物箇所や LRF のセンサノイズによって発生した通過悪影響段差 が存在することによる.図 2-38 (b)の結果では,図 2-38 (a)の結果よりも一致度が低い ことがある.ここで,段差が一致しない箇所を検出するために,(A)の 1 回目と(B)の 2 回目の否定論理積をとった結果を図 2-38 に示す.図 2-38 からも,通路終了付近で 再現性が低下していることが確認できる. 図 2-382-382-382-38 地図の否定論理積 実験により得られた 2.5 次元地図のデータサイズは 200KBytes であった.生成され る地図はスキャンを行った箇所のデータのみが蓄積されていくため,データサイズは ロボットが進行した距離に比例する.今回の実験では 20m の移動であったが,移動距 離が 100 倍になり 2000m移動した場合は,データサイズも 100 倍の 20MBytes になる ことが予想できる.一般的なグリッドマップではスキャン範囲を含めた方形のデータ 領域をあらかじめ確保する必要があるため,データサイズは 2.5 次元地図より増加す る.
第 3333 章
視線日本語入力効率化
3.1.
概要
本研究では,文章入力の効率を改善するために新たな予測変換手法の確立を目指 す.現在,携帯電話や PC などの文章入力で使用されている従来の予測変換技術は,1) 過去に入力確定されたものの優先順位を高くする,2)辞書をユーザが指定・選択する, 3)文脈を利用する,が一般的である.本研究で対象とするユーザは過去の入力確定デ ータが存在しないため,そのユーザに適切な辞書が存在しない. 本研究の特徴は,ユーザによって蓄積された情報である静的属性,場所・日時な どの基本属性,状況と対象推定による動的属性を融合的に組み合わせて,予測変換精 度を向上させる点である.静的属性は,生活の中で周囲の音声や画像を取得し,それ らを利用してデータベースを作成する.本研究では,これをライフログとしている. さらに,ユーザが自分で設定可能な情報が該当する.例えば,好物や人物の名前が相 当する.表 1 に各項目を示す.これらの項目が融合的に連携することで,同じ「お」 と視線入力した場合でも 例 1:おはよう:時間的情報が 08:00 から 例 2:おやすみ:時間的情報が 22:00 から 例 3:おめでとう:人物識別で目の前の人が誕生日である場合 例 4:おいしい:空間的情報が「食堂」の場合 例 5:おおぜい:人物情報で複数の人物が認識された場合 例 6:おるごーる:周囲情報で「オルゴール」が識別された場合 と,正しい語候補を推定することが可能になる. 健常者のコミュニケーションにおいては,突発的・偶発的な要因で語彙推定を行う ことは非常に難しい.発話不可肢体不自由者の場合,生活環境が限定されていること から,ある程度の語彙推定が可能である. 表 3-13-13-13-1 生成地図と実測値の比較 属性 項目 特徴 静的属性 知識・経験 文字列自動取得,累積と忘却 単語自動取得,累積と忘却 基本属性 時間的情報 基本単語選択 空間的情報 場所の自動取得,屋外では GPS 動的属性 周囲情報 対象物識別・音声認識・文字識別 人物情報 人物識別,ライフログとの連動3.2.
システム構成
システム構成を図 1 に示す.静的属性の情報は,カメラによって得られる視覚情報 と IC レコーダによって得られる音声情報より生成する.本研究では蓄積された情報 をライフログとする.ライフログより,使用頻度の高い固有名詞から構築される語彙 データベースを作成する.現在,語彙データベースは手動操作によって作成されてい るが,自動的に固有名詞を分析する手法を組み合わせることで,より高効率なシステ ムが期待できる. 基本属性の情報として,時計から日時と現在時刻を取得し,屋外では GPS から現 在位置を取得する.これにより時間と場所に対応した語彙推定が可能となり,挨拶な どの基本単語の入力を助ける. 動的属性の情報を得るために,周囲の画像情報,音声情報を取得する.得られた画 像には一般物体認識を利用し,周囲にある物体を取得する.肢体不自由者の場合は周 囲にある物体を話題にあげることが多いため,この手法によって物体に関する単語を 推測する.また,顔認識や人物認識を用いることで人物の特定をし,静的属性との対 応をとる.音声情報はマイクアレイによって取得し,音源定位と音声認識を行う.こ の処理によって,周囲の雑音に対応したロバストな音声取得が可能である. 音源定位のソフトウェアとして HARK[22]を使用する.HARK は MUSIC 法[23]を利 用し,ほぼ実時間で音源分離を行なうことが可能である.分離した音声情報 に Julius/Julian[24]を用いて語推定を行なう.この語推定により,対話中の人物との話題 に対応する. 静 的 属 性 ( 知 識 、 経 験 ) 基 本 属 性 ( 時 間 、 空 間 ) 動 的 属 性( 環 境 ) デ ジ タ ル I C レ コ ー ダ カ メ ラ P C 1 時 計 G P S カ メ ラ マ イ ク ロ フ ォ ン ア レ イ P C 2 語 彙 辞 書 (既 存 の も の) 視 線 日 本 語 入 力 シ ス テ ム 語 彙 デ ー タ ベ ー ス ラ イ フ ロ グ 入 力 文 字 列 推 定 し た 語 彙 確 定 し た 文 字 列 図 3-13-13-13-1 ハードウェア構成3.3.
ワードツリー
3.3.1. 特徴
本研究では,単語同士にツリー構造の関連を持たせる.これは検索システムなどで 利用されている,シソーラスをベースにしたものであり,ワードツリーと定義する. 語彙データベースはワードツリーによって構成され,システムはあらかじめこれを読 み込んでおく. ワードツリーはツリー構造で記述されているため,単語同士の上下の関連を利用し た変換候補の探査が可能である.例えば,現在の話題が食べ物であった場合,食べ物 に関係した単語を優先的に変換することが可能となる.これにより,現在の周囲状況 に対応した予測変換を実現する. ワードツリーに登録された単語は予測変換で用いられる.各単語は活性化状態と定 義する内部状態を持ち,活性化状態はシステムが観測した周囲情報によって変化す る.活性化状態から単語の優先度の値が計算され,この値から変換の優先順位決定さ れる. システムが検出する情報と,単語ごとに設定されている条件が一致したとき,単語 は活性化し,活性化状態となる.この条件を活性化条件と定義する.条件一致の判定 を行うタイミングは,システムが音声・物体認識により,情報を検出したときである. 現在時刻を条件とする場合は数分ごとに条件一致の判定を行う.3.3.2. 優先度の変動
単語が活性化した時点では優先度の値は最大となり,活性化状態終了後からの経過 時間に応じて優先度は減少する.優先度は式 3-1 に示すようなガウシアン関数をモデ ルにした変動をする.P,t,σはそれぞれ優先度の最大値,時間経過,減衰率を表す. priority=Pexp∣
−t 2σ2∣
… (3-1) 優先度は時間情報・物体認識・音声認識を利用するそれぞれの場合で変動の仕様が 異なる.時間情報で活性化する単語の場合,ピークの時間を中心として優先度が変化 する.優先度の概形を図 3-2(a)に示す.物体認識で活性化する場合,対応する物体が 認識されている間で優先度が最大となり,画像から物体が外れるなどして認識されな くなってからの時間経過で優先度が減少する.物体認識の優先度の概形を図 3-2(b)に 示す.音声認識で活性化する場合は,対応する音声が認識された時点で優先度が最大 となり,優先度は経過時間で減少する.概形を図 3-2(c)に示す.優先度が減衰して設 定した閾値以下になったとき,単語は非活性状態となり,優先度は 0 に設定される. 非活性状態から活性化した場合,優先度の最大値は規定値の 1.0 となる.しかし, 単語が活性化状態で再び活性化した場合,優先度の最大値 MAX は,現在の優先度の 10 分の 1 を,規定値の 1.0 に加算した値となる.この動作によって,短い時間内に複 数回の活性化を繰り返した単語は,より高い優先度の値を持ち,優先順位も高くなる. 時 間 優 先 度 Pduring the recognition優 先 度 の ピ ー ク 時 間
時 間 優 先 度 物 体 認 識 中 P (a) 時間情報 (b) 物体認識 時間 優 先 度 音 声 認 識 を し た 時 点 P (c) 音声認識
3.3.3. ツリー構造と話題の深さ
ある単語が活性化したとき,その単語を基準として上層にある単語と下層にある単 語をすべて活性化させる.これは,話題の深さを考慮するための動作である.例えば, 「食物」が最上層にあるワードツリーを想定する.このワードツリーには「果物」,「野 菜」などが下層に含まれており,「果物」にはさらに「りんご」や「オレンジ」など が含まれている. このワードツリーに含まれる「果物」は,以下に示す条件のいずれかが満たされた 場合に,活性化するように設定する. 「果物」という単語を使用者が視線入力する. 音声認識結果として「果物」を取得する. これらの条件が満たされたとき,話題の中心は「果物を食べること」や「果物の種 類について」であると想定できる.このとき,視線入力利用者が続けて入力する単語 は,果物の種類である「りんご」や「オレンジ」である可能性が高い .「果物」が活 性化したときに同時に「りんご」や「オレンジ」が活性化するため,これらの単語を 優先して予測変換することが可能である.このワードツリーと「果物」が活性化条件 を満たした際の様子を図 3-4 に示す.活性化した単語は赤枠で囲って表す. 図 3-3 のように活性化した場合は,「野菜」以下の下層の単語は活性化されず, 予測変換には考慮されない.しかし,話題の深さが「食物」まで上った場合は ,「野 菜」も活性化される.活性化条件を満たした単語より上層の単語も活性化する動作か ら,話題が上ることにも対応できる.よって ,「果物」の話題から「食物」を入力す ることも容易となる. 果 物 ぶ ど う オ レ ン ジ り ん ご 食 物 野 菜 図 3-33-33-33-3 ワードツリー活性化の例3.3.4.
データベース形式
ワードツリーを登録する語彙データベースは,階層構造の表現に優れる XML 書式 によって記述している.
単語は word 要素で記述する.name 属性では単語名を設定し,pron 属性では単語の 読みを設定する.ただし,読みは平仮名で記述する.ワードツリーでの下層にあたる 単語や,単語が持つ条件と関連語は下階層に含むように記述する. 活性化条件は trigger 要素で記述する.type 属性では認識の種類を指定する.物体認 識を用いる場合は img,音声認識を用いる場合は snd,時間情報を用いる場合は time を記述する.認識の内容は obj で指定する.例えば,"りんご"を音声認識することを 条件としたい場合は,type="snd",obj="りんご"と記述する.活性化条件は複数設定可 能である. 各単語の関連語は,synonym 要素で指定する.name 属性では設定する関連語の名 称を記述する.word 要素と同様に,pron 属性で単語の読みを設定する.単語が活性 化されたとき,同義語も同じ優先度で予測変換される.同義語は複数設定可能である. ワードツリーの記述例を図 3-4 に示す.
<?xml version="1.0" encoding="Shift-JIS"?> <wordtree>
<word name="食物" pron="しょくもつ">
<synonym name="食べ物" pron="たべもの"></synonym> <trigger type="snd" key="食べる"></trigger>
<word name="果物" pron="くだもの">
<synonym name="果実" pron="かじつ"></synonym> <word name="りんご" pron="りんご">
<trigger type="img" key="りんご"></trigger> <word name="ふじ" pron="ふじ"></word> <word name="旭" pron="あさひ""></word> </word>
<word name="オレンジ" pron="おれんじ"></word> <word name="バナナ" pron="ばなな"></word> </word>
<word name="野菜" pron="やさい">
<word name="玉ねぎ" pron="たまねぎ"></word> <word name="ジャガイモ" pron="じゃがいも">
<word name="男爵" pron="だんしゃく"></word> </word>
<word name="オクラ" pron="おくら"></word> </word>
</word>
<word name="動物" pron="どうぶつ"> <word name="犬" pron="いぬ"> </word> <word name="猫" pron="ねこ"></word> <word name="鼠" pron="ねずみ">
<synonym name="ネズミ" pron="ねずみ"></synonym> </word>
</word> </wordtree>
![表 2-2 2-2 2-2 2-2 角度 30 30 30 30 °での取得した段差情報の評価 項目 実測値 [mm] 実験値 [mm] 誤差 [mm] 誤差 [%] 段差 a の高さ 120 120 0 0.0 段差 b の高さ 120 123 3 2.5 段差 d の高さ 120 116 4 3.3 段差 e の高さ 120 116 4 3.3 段差 f の高さ 100 95 5 5.0 段差 g の高さ 80 75 5 6.3 段差 i の高さ 120 114 6 5.0 段差 j の高さ 120 1](https://thumb-ap.123doks.com/thumbv2/123deta/7695587.1216975/21.892.121.805.223.878/角度°取得段差情報評価項目実測実験誤差誤差段差高さ段差高さ.webp)
![表 2-3 2-3 2-3 2-3 角度 15 15 15 15 °での取得した段差情報の評価 項目 実測値 [mm] 実験値 [mm] 誤差 [mm] 誤差 [%] 段差 a の高さ 120 120 0 0.0 段差 b の高さ 120 120 0 0.0 段差 d の高さ 120 118 2 1.7 段差 e の高さ 120 116 4 3.3 段差 f の高さ 100 98 2 2.0 段差 g の高さ 80 78 2 2.5 段差 i の高さ 120 116 4 3.3 段差 j の高さ 120 1](https://thumb-ap.123doks.com/thumbv2/123deta/7695587.1216975/22.892.126.805.220.878/角度°取得段差情報評価項目実測実験誤差誤差段差高さ段差高さ.webp)