1. 準天頂衛星測位システムの精密測量への応用技術の研究開発
本項目においては、準天頂衛星を含む次世代衛星システムを用いた精密測量への応用技 術を開発する。その場合、衛星測位データを模擬的に生成し、測量解析を行って精度評価 を定量的に行うシミュレーション手法を用いる。 そこで、はじめに、多様な次世代衛星システムによる衛星測位データを生成することが できる、基盤となる「衛星測位システム・シミュレータ」を開発した。つぎに、衛星測位 データが精密測量を数値的に模擬するものに高精度化するため、「衛星測位システム・シ ミュレータ」の高度化を図る改良を行った。さらに、「衛星測位システム・シミュレータ」 の利用にあたり、多様な測量環境を模擬したシミュレーションを効率的に設定し、高速処 理が可能となるようにするため、効率的な入力インターフェースを開発し、高速処理化ア ルゴリズムを開発した。 1.1. 衛星測位システム・シミュレータのプロトタイプ開発 1.1.1. 衛星測位システム・シミュレータのプロトタイプ開発 1.1.1.1. 目的 本事項では、現行のGPS のほか、準天頂衛星、近代化 GPS、Galileo 等の次世代衛星測 位システムが実用化された場合に、それらのシステムを精密測量に利用する方法や測位精 度を予測評価するために必要となるシミュレーション手法を開発する。そのシミュレーシ ョンでは、模擬的な衛星測位データを生成する「衛星測位システム・シミュレータ」を開 発し、そのデータを既存の(学術用)精密基線解析ソフトウェアによって解析して測位解 の精度を評価する手法を用いることとする(図 1-1-1)。 「衛星測位システム・シミュレータ」には、多様な衛星測位システムによる観測を模擬 する測位データを生成することが求められる。従って、「衛星測位システム・シミュレータ」 として、既存のGPS のほか、準天頂衛星、近代化 GPS、Galileo 等の次世代衛星測位シス テムによる軌道を生成し、伝搬経路上にある大気や電離層などによる遅延を考慮して、地 上に設定した任意の観測点で受信される測位データを擬似的に生成するシステムを開発す る。受信機 受信機 GPS、準天頂衛星等の軌道計算 模擬軌道データ(SP3) 模擬受信データ(RINEX) 衛星可視数、DOP、 軌跡等の表示 精密測位解 析ソフトウェ ア 測位精度の 評価・予測
衛星測位シミュレータ
伝搬媒体モデル 誤差モデル 受信機 受信機 GPS、準天頂衛星等の軌道計算 模擬軌道データ(SP3) 模擬軌道データ(SP3) 模擬受信データ(RINEX) 衛星可視数、DOP、 軌跡等の表示 衛星可視数、DOP、 軌跡等の表示 精密測位解 析ソフトウェ ア 測位精度の 評価・予測衛星測位シミュレータ
伝搬媒体モデル 誤差モデル 図 1-1-1 衛星測位システム・シミュレータを用いたシミュレーションの概念 1.1.1.2. 基本設計 「衛星測位システム・シミュレータ」は、地球上の任意の位置・時刻において観測者(受 信機)と測位衛星システム(GPS、準天頂衛星、ガリレオ等)を与え、観測位置において 取得されると考えられる測位データ(位相および擬似距離)を数値的に模擬生成し、それ をGPS データの標準書式である RINEX 形式で出力するシステムである。その場合、伝搬 経路上にある大気や電離層における伝搬遅延や受信機起源の誤差等を付加する。 汎用性のあるシミュレータを開発するため、Windows XP で動作し、操作は基本的に GUI で行うシステムとする。その構成は、次のとおりである(図 1-1-2)。 (1) GUI機能 (2) 軌道生成機能 (3) 観測量生成機能 (4) 描画機能 GUI機能では、多様な衛星測位システムや受信点環境の設定、動作の制御、結果の描画出 力の指定などを行う。描画機能としては、軌道データの地上軌跡、各観測点における衛星 可視状態(可視衛星数、DOP:幾何学的精度劣化係数、受信機時計誤差)や電離層の全電 子数分布図などを表示する。 軌道生成は、衛星軌道条件や衛星軌道に及ぼす摂動効果の設定に従い、図1-1-3に示す手 順で行う。また、観測量の生成は、軌道生成機能による軌道データや観測点や観測条件の 設定に従い、図1-1-4に示す手順で行う。図1-1-2 衛星測位システム・シミュレータのソフトウェア構成 図1-1-3 軌道生成の手順 G U I 機 能 軌 道 生 成 機 能 観 測 量 生 成 機 能 描 画 機 能 生 成 条 件 作 成 実 行 制 御 生 成 条 件 作 成 実 行 制 御 描 画 条 件 作 成 実 行 制 御 生成条件読込機能 数値積分機能 座標変換機能 ITRF/ICRF エフェメリスアクセス機能 摂動計算機能 地球重力ポテンシャル 太陽・月、惑星引力 太陽輻射圧 潮汐力 大気抗力 出力機能 SP3形式 IERS EOP C04 データ DE405 JPL エフェメリスデータ RKN11/17 RKN4 大気抗力考慮時 SP3形式軌道データ 生成条件中間ファイル GUI機能 シミュレーション開始時刻から 終 了 時 刻 ま で 起動
図1-1-4 観測量生成の手順
1.1.1.3. 軌道生成の処理
軌道生成においては、以下の処理を用いる。
(1) 天文基準系(ICRF)と測地基準系(ITRF)間の座標変換
ICRF と ITRF 間の座標変換は、IERS Conventions(2000)に準拠した処理を行う。歳 差・章動にはIAU2000A のモデルを用い、IERS EOP C04 によって公表される地球 回転パラメータに、海洋潮汐に対する補正を行って修正を加える。 生成条件読込機能 TerrainBase or GSI50mDEM 電離層データ RINEX観測データ 生成条件中間ファイル GUI機能 観測局数 起動 シミュレーション開始時刻から終了時刻まで 観測データ出力機能 軌道データ補間機能 幾何学的距離算出機能 DEM遮蔽計算機能 DOP値計算機能 電離層遅延計算機能 対流圏遅延計算機能 クロック誤差付加機能 マルチパス/サイクルスリップ機能 衛星数 RINEX観測データ作成機能 RINEX観測データ 軌道生成機能出力 SP3形式軌道データ GRIB気象データ
測 位 衛 星 は 高 い 軌 道 高 度 を と る と 想 定 さ れ 、 そ の 場 合 の 衛 星 軌 道 の 計 算 に は Runge-Kutta-Nystrom の 11 次 17 段数値積分法(RKN11(17))を用い、大気の影響 を 強 く 受 け る 低 い 軌 道 高 度 (1000km 以 下 ) の 衛 星 に 対 し て は 、 Runge-Kutta-Nystrom4 次数値積分法(RKN4)を用いる。後者においては、積分時 間の刻み幅を2.0 秒とする。 (3) 衛星軌道に対する摂動モデル 1)地球重力ポテンシャル:JGM-3(球面調和係数で 70 次・位完備)、または、EGM96 (同360 次・位完備)のいずれかを選択する。使用する最大の次数、位数につい ては、自由に設定可能である。 2)惑星、月、太陽の引力:DE405 による惑星等の軌道を用いる。地球による引力効 果は必須であるが、その他の天体による3 体効果については、自由に選択可能で ある。 3)太陽輻射圧:つぎの2通りのいずれかを選択する。1つは、太陽輻射圧係数 Cr を用いて、衛星の重量と基準断面積から計算する方法、他の1つは、GPS 衛星に 対するT20 または T30 モデルを用いる方法、である。なお、天体による遮蔽に ついては、地球による太陽遮蔽効果を考慮する。 4)固体地球潮汐:ラブ数k2=0.3 を用い、2 次の固体地球潮汐力を考慮する。 5)大気抵抗:米国標準大気モデルUS76 を大気密度モデルとする。 1.1.1.4. 観測量生成の処理 観測量の生成においては、以下の処理を用いている。 (1) 軌道生成データからの軌道補間 軌道生成機能において、指定時間間隔で生成された軌道暦データから、任意の時刻に おける衛星の軌道位置は、11 次のラグランジュ補間によって行う。 (2) 観測点座標の生成 観測点座標は、GEONET 局についてはその位置ファイルとアンテナ位置情報ファイ ルからITRF 系での位置座標を取得するか、測地学的緯度・経度・アンテナ高を使用 者が入力する。後者の場合、観測点の楕円体高を求めるため、国内位置については、 EGM96 モデルによるジオイド高データと、国内位置については国土地理院の数値地 図50mメッシュ標高(以下、DEM と呼ぶ)から、ジオイド高と標高を内挿処理で求 め、海外位置についてはTerrainBase 標高データから楕円体高を求める。 (3) 地形による遮蔽効果計算 国内位置についてDEM、海外位置については TerrainBase を地形データとして用い、 地形による遮蔽効果を計算する。衛星観測の最低仰角は5 度とし、観測点位置を中心 として100km 四方の範囲における地形を考慮する。 (4) 電離層遅延
電 離 層 モ デ ル と し て 、 単 層 モ デ ル を 適 用 し 、CODE ( the Center for Orbit Determination in Europe)から公表されている球面調和係数モデル GIM(Global Ionospheric Maps、2 時間毎、電離層高度は 450km と仮定)を用いて伝搬経路に沿っ た全電子数を求め、搬送波とコードに対する電離層遅延を推定する。 (5) 対流圏遅延 大気中の気温、気圧、相対湿度は、US76(相対湿度は 80%とする)、または、GRIB 形式領域客観解析データから求める。伝搬経路は、レイトレーシングによる基本式を 用いて数値積分を一度行って得られる一次近似の経路として求める。 (6) 時計誤差のモデル 測位衛星搭載の時計、および、受信機の時計の誤差モデルとして、次のモデルが選択 可能である。 ・ 白色雑音 ・ ランダムウォーク ・ δ-PROCESS(衛星のみ) ・ 時間についての2次多項式(受信機のみ) δ-Process は、2 次マルコフ過程に基づいてモデル化した、周期性のある誤差である。 また、2 次多項式は、時計誤差の大きさとして の制約を設け、 -1msから+1msへ、あるいは+1msから-1msへ -1msからゼロへ、あるいは+1msからゼロへ の2つの遷移モデルを仮定する。 (7) マルチパス、サイクルスリップ マルチパス誤差として、全天球を方位角と仰角を5 度間隔で区分した点における遅延 距離を数値表の形で入力可能である。また、サイクルスリップとして、衛星毎に発生 時刻を指定し、一定量のサイクルスリップを全周波数帯について同時に発生可能であ る。 1.1.1.5. 出力データ 衛星軌道の生成データは、SP3 形式のファイルとして出力される。 観測データは、次の3つの形式で出力される。 ・ CSV形式観測状況ファイル ・ 観測データファイル ・ RINEX観測データ CSV 形式の観測状況ファイルには、観測点位置、観測期間や衛星可視状態(可視衛星数、 各種のDOP 値、受信機時計誤差、可視衛星番号)の時系列が含まれる。観測データファイ 1ms t1ms
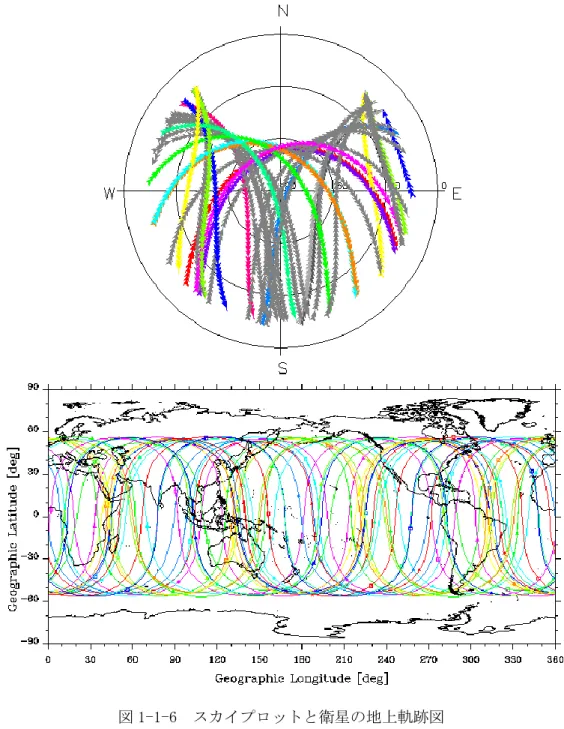
る。解析に用いることができるRINEX 観測データは、バージョン 2.10 に準拠した観測量 の出力ファイルである。 1.1.1.6 性能評価 開発された衛星測位システム・シミュレータを、生成された軌道の地上軌跡図を画像機能 の出力例として動作させた場合の写真を図 1-1-5 に示す。 図 1-1-5 衛星測位システム・シミュレータ 生成された軌道の地上軌跡が画面表示されている。 この衛星測位システム・シミュレータを用いて作成された衛星観測のスカイプロットと 測位衛星の地上軌跡図の例を図 1-1-6 に、24 時間観測における PDOP 値と可視衛星個数の 時系列を図 1-1-7 に示す。図 1-1-6 から、人工衛星の軌道データは正しく生成され、描画 機能も正しく動作していることが分かる。また、図 1-1-7 から、観測量データが正しく生 成され、DOP 値や可視衛星の個数が時系列として正しく評価されていることが分かる。 つぎに、衛星測位システム・シミュレータによる観測量データから測位解が求められ、 測位解が入力された観測点位置を精度内で再現していることを評価する。観測量の生成で は、観測点をつくば市の国土地理院構内に設定し、対流圏、電離層、衛星時計の誤差を大 きめに与えた条件を用いる。解析解は二周波のデータを用いて電離層遅延の推定/補正を
行っている。誤差モデルの設定からは、エポック毎の測位解が1m 以内で再現されれば、観 測量データが正しく生成されていると考えられる。図 1-1-8 に、48 時間の観測データを生 成し、観測エポック毎に求めた測位解の各成分をPDOP とともに示している。図 1-1-8 か ら、測位解はいずれの成分についても数十cm 程度で復元されていることが分かる。従って、 衛星測位システム・シミュレータは観測量を正しく生成していることが分かる。 図 1-1-8 衛星測位システム・シミュレータを用いたデータによる測位解の入力値復元性 (左上)緯度成分、(左下)経度成分、(右上)高さ成分、(右下)PDOP。 経度、緯度の 10-7度は、地表位置の約 1cm に相当する。 -5 10- 6 -4 10- 6 -3 10- 6 -2 10- 6 -1 10- 6 0 1 10- 6 2 10- 6 3 10- 6 0 50000 100000 150000 200000 (s ec onds ) (degrees ) -5 10- 6 -4 10- 6 -3 10- 6 -2 10- 6 -1 10- 6 0 1 10- 6 2 10- 6 0 50000 100000 150000 200000 (s ec onds ) (degrees ) -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0 50000 100000 150000 200000 (seconds) (m) 1 2 3 4 5 6 0 50000 100000 150000 200000 (seconds)
EVAL-SPSS-PPOS-02-OUT-01(1/3) PPOS 推定位置誤差(緯度) EVAL-SPSS-PPOS-01-OUT-01(3/3) PPOS 推定位置誤差(楕円体 高度)
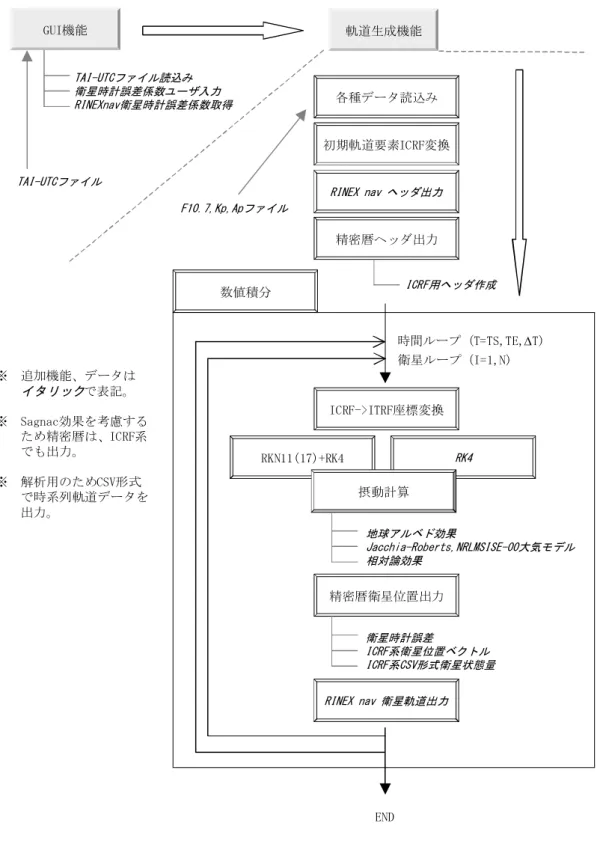
1.2. 衛星測位システム・シミュレータの機能拡充 1.2.1. 衛星測位システム・シミュレータの機能拡充 1.2.1.1. 目的 次世代衛星測位システムを精密測量に利用する方法や測位精度を予測評価するために必 要となるシミュレーション手法の開発に関し、1.1.1 において、模擬的な衛星測位データを 生成する「衛星測位システム・シミュレータ」のプロトタイプが開発された。衛星測位シ ステムを用いた精密測量は、最も高精度な測位を実行するものであるため、基盤となる「衛 星測位システム・シミュレータ」において、衛星測位データが精密測量を数値的に模擬す るものに高精度化する、改良が必要である。そこで、より高精度な人工衛星軌道などの摂 動効果、相対論的効果、測位電波の伝搬遅延モデルの高精度化や都市部の高層建築物によ る衛星電波の遮蔽効果の精密化等に対応させたシステムの改良を行う。 1.2.1.2. 改良されたソフトウェア構成 「衛星測位システム・シミュレータ」の機能拡充においては、基本となるシステムの構成 は変えず、軌道生成機能、観測量生成機能に必要となる改良を行うこととした。拡充され た機能については後述するが、改良後のソフトウェアの構成を、軌道生成については図 1-2-1、観測値生成について、図1-2-2に示す。
図 1-2-1 軌道生成のソフトウェア構成(改良後) GUI機能 TAI-UTCファイル読込み 衛星時計誤差係数ユーザ入力 RINEXnav衛星時計誤差係数取得 軌道生成機能 各種データ読込み 初期軌道要素ICRF変換 精密暦ヘッダ出力 数値積分 ICRF->ITRF座標変換 RKN11(17)+RK4 RK4 摂動計算 地球アルベド効果 Jacchia-Roberts,NRLMSISE-00大気モデル 相対論効果 精密暦衛星位置出力 ICRF用ヘッダ作成 衛星時計誤差 ICRF系衛星位置ベクトル ICRF系CSV形式衛星状態量 時間ループ(T=TS,TE,T) 衛星ループ(I=1,N) END TAI-UTCファイル F10.7,Kp,Apファイル ※ 追加機能、データは イタリックで表記。 ※ Sagnac効果を考慮する ため精密暦は、ICRF系 でも出力。 ※ 解析用のためCSV形式 で時系列軌道データを 出力。 RINEX nav ヘッダ出力 RINEX nav 衛星軌道出力
GUI機能 TAI-UTCファイル読込み 海洋潮汐計算条件設定 対流圏モデル/気象モデル選択 電離層モデル選択 サイクルスリップ条件設定 観測値生成機能 実行条件読込み DSM読込み ICRF精密暦読込み TAI-UTCファイル ※ 追加機能、データは イタリックで表記。 GSI 50m DEM読込み LIM係数読込み GIM係数読込み 受信機時計誤差生成 ITRF精密暦読込み 海洋潮汐変位計算 固体潮汐変位計算 DSM/DEM可視判定 幾何学的距離計算 相対論効果補正 衛星アンテナ位相オフセット 受信機アンテナ位相特性 局位置座標変換->ICRF 対流圏遅延量計算 GrADS形式気象データ読込み 仰角イタレーション機能 Saastamoinen/Hopfield + Niell ユーザ定義天頂遅延/一次勾配 電離層遅延量計算 GIM+LIM係数によるVTEC計算機能 KlobucherモデルVTEC計算機能 高次効果付加 マルチパス誤差計算 C C B A 観測局ループ(I=1,NSTA) 時間ループ(T=TS,TE,T) 衛星ループ(J=1,NSAT) D D B サイクルスリップ生成 RINEX obs 生成 乱数/周波数別生成 A END DE405 Ephemeris 潮汐調和定数 or 潮汐荷重変位 ICRF系で計算 ITRF系で判定
1.2.1.3. 軌道生成の機能拡充 軌道生成においては、以下の機能を追加する。 (4) 地球アルベード効果 地球放射として、太陽光の主に短波長の地表面反射であるアルベードと熱輻射がある。 これらの効果についてモデル化して、軌道生成において考慮する。 (5) 大気モデルの追加 低軌道衛星に及ぼす大気抵抗による摂動のモデルを高精度化するため、以下の大気モ デルを追加する。 ・ Jaccia-Roberts モデル ・ NRLMSISE-00 モデル 前者では、外部データとして F10.7 太陽フラックスデータと Kp 地磁気指数データ、 後者では、外部データとしてF10.7 太陽フラックスデータ、Ap 地磁気指数データを 用いて大気分布モデルを高精度にモデル化する。 (6) 相対論的効果 人工衛星に働く相対論的加速度効果として、IERS Conventions 2003 に準拠したモデ ルを導入する。 (7) 数値積分法 人工衛星の軌道積分に用いる2つの数値積分法である RKN11(17)と RKN4 法の適 用において、使用者が選択可能とする。 (8) 衛星時計の誤差モデル 人工衛星の時計誤差について、時間についての2 次多項式モデルの導入を可能とする。 この場合に必要となる4つのパラメータについて、使用者による入力のほか、 RINEXnavi ファイルからの取得を可能とする。 (9) 原子時と協定世界時の差データ 原子時と協定世界時の差は、使用者による入力が必要であったが、公表web サイトか らの自動取得を行うようにする。 (10) ICRF 系での軌道データ出力 後述する観測量生成機能の追加で考慮するSagnac 効果の処理に対応するため、人工 衛星の軌道暦をICRF 系で表した SP3 形式のファイルを出力させる。 (11) RINEXnavi 形式の航法データの出力 SP3 形式の軌道暦データ出力のほかに、軌道暦、電離層モデルである Klobuchar の係 数、UTC への変換パラメータ、衛星時計の誤差係数を収容した RINEXnavi 形式の航 法データを出力させる。 1.2.1.4. 観測量生成の機能拡充 観測量生成においては、以下の機能を追加する。
(1) 電離層モデル ・ Klobuchar モデルの追加 ・ 局所電離層モデルの追加・統合機能の追加 ・ 電離層遅延における高次効果の追加 電離層遅延の計算において、Klobuchar モデルを用いる選択が可能とする。モデルに は8 個のパラメータが必要となるが、それらは使用者が入力するか、RINEXnavi フ ァイルから取得することを選択することにする。 電離層モデルとして用いるCODE-GIM モデルに対し、使用者が指定した領域につい て、使用者が作成した局所的な電離層の球面調和関数モデル LIM で置き換え可能と する。LIM における球面調和関数モデルの格納形式は CODE-GIM モデルと同一にし、 使用者が作成したLIM 領域定義ファイルと LIM 係数ファイルを参照する方式をとる。 電離層遅延の主要効果は電波の搬送波周波数の-2 乗に比例する成分で表されるが、搬 送波周波数の-3 乗に比例する成分(2 次効果)を追加する、この場合、測地座標から 地磁気座標への変換が必要になるが、地磁気の磁場ベクトルの計算には、米国防衛局 DoD の世界地磁気モデル World Magnetic Model を用いる。
(2) 建築物による遮蔽効果計算の追加
都市部における高層建築物等による衛星測位電波の遮蔽効果を高精度化するため、国 土地理院による5m メッシュの Digital Surface Model(以下、DSM と呼ぶ)を考慮 した遮蔽計算機能を追加する。この場合、通常の地形モデル(国内では DEM、海外 地点についてはTerrain Base)による地形効果に DSM を重ね合わせたモデルから遮 蔽計算を行う(図 1-2-3)。 図 1-2-3 都市部における高層建築物等による衛星測位電波の遮蔽効果 GPS 準天頂衛星 測量ユーザー GPS 準天頂衛星 測量ユーザー
(3) 対流圏遅延計算における局所気象モデルの考慮 対流圏遅延の計算に用いる気象モデルとして、GrADS 形式の気象データを選択可能 とする。また、気象モデルとして、US76 と GrADS を組み合わせること、使用者が 指定した観測点位置における気温、気圧、相対湿度を用いた簡易遅延モデルの使用を 選択可能とする。 (4) 対流圏遅延のモデルの追加
対流圏遅延の天頂モデルとして、Hopfield モデル、Saastamoinen モデル、Niell の マッピング関数にSaastamoinen モデルを組み合わせたものを選択可能とする。 (5) レイトレーシングの高精度化 対流圏遅延の計算で行うレイトレーシング処理において、使用者が指定する最大仰角 以下である視線について、繰り返し処理を行うように改善する。 (6) 気象モデルの組み合わせ 対流圏遅延の天頂モデルとして、Hopfield モデルと Saastamoinen モデルを選択可能 とする。また、対流圏遅延のマッピング関数としてNiell のマッピング関数を選択可 能とする。 (7) 相対論的効果 つぎの相対論的効果について、考慮を追加する。 ・ 衛星固有時 ・ 計測距離 ・ Sagnac 効果 衛星固有時は、慣性空間を運動する2 次ドップラー効果と地球重力場によるポテンシ ャル効果により、歩度が変わる。重力場の中を伝搬する光の伝搬速度は、見かけ上小 さくなるシャピロ効果を示す。また、回転座標系では、光の伝搬経路が方向に応じて 螺旋を描くSagnac 効果を示す。これら相対論的効果を考慮に入れる。 (8) アンテナ位相特性の処理 受信機アンテナの位相特性について、IGS 形式によるモデルを周波数毎に入力可能ろ する。また、衛星側のアンテナについて、その位相特性と衛星重心-アンテナ中心間 のずれを入力可能とする。 (9) 固体地球潮汐、海洋潮汐による変位 地上の観測位置に及ぼす固体地球潮汐、海洋潮汐による変位を考慮する。 後者については、IERS Conventions 2003 に準拠したモデルを用いる。 前者については、GOTIC2 を用いる。この場合、潮汐モデルとしては、NAO99.b、 CSR4.0、GOT99.2b、SCHW のモデルから1つを選択する。 (10) サイクルスリップの発生機能向上 サイクルスリップの発生において、周波数帯別に、発生回数の指定、発生時刻の乱数
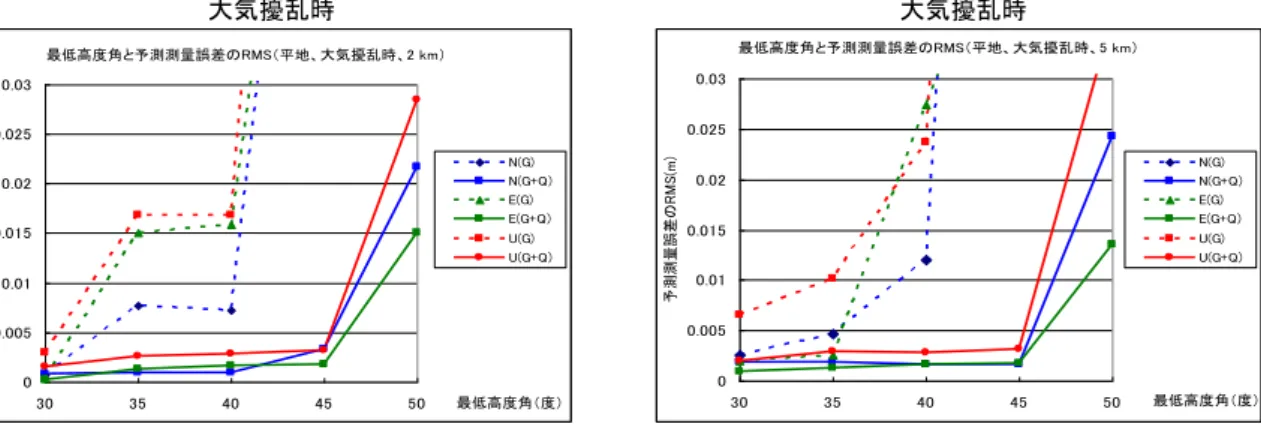
的発生、サイクルスリップ量の正規分布的生成を可能とする。 なお、軌道生成、観測量生成の機能拡充に伴って、入出力ファイルやGUI の一部に対 応する修正を行う。 1.2.1.5. 性能確認 機能向上された衛星測位システム・シミュレータの性能を確認する一例として、ここでは、 電波遮蔽効果とそれに対する準天頂衛星システムのGPS 補完性についての幾何学的評価を 行う。観測条件としては、遮蔽効果の大きな山間部と都市部における測量を考える。特に、 後者については、DSM の導入による効果を調べる。 (1) 測量条件の設定 山間部の観測として岐阜県東部(下呂温泉の南 27km)、都市部における観測として東 京都赤坂における観測を設定する。現行のGPS と現在想定されている 3 機の準天頂衛 星による観測を24 時間行うこととする。準天頂衛星による GPS 補完性の評価として、 4 衛星以上が受信され、幾何学的測位精度の指標の一つである PDOP が 6 以下である状 態を測位可能状態と仮定する。観測時間を1 時間毎に分割し、測位可能な時間の割合を 測位可能時間率として求める。GPS 衛星だけによる場合と、それに準天頂衛星が加わ った場合を比較する。 (2)山間部における測位可能時間率の結果 岐阜県東部(下呂温泉の南27km)にある水準点位置に観測点を設定する。観測点の位 置とその周囲の地形断面を図 1-2-4 に示す。 図 1-2-4 山間部に設けた観測点位置とその周辺の地形断面 この点における24 時間観測の GPS 衛星と準天頂衛星のスカイプロットと 1 時間毎の測 位可能時間率を図 1-2-5 に示す。
図 1-2-5 山間部における 24 時間観測の GPS 衛星と準天頂衛星のスカイプロット(上) と 1 時間毎の測位可能時間率(下) 図 1-2-6 都市部に設けた観測点位置とその周辺の建築物の状況 背景の航空写真は、図中下部に記された会社による。 100 50 0 24 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 時 % GPSのみ GPS+準天頂
ホテルニューオータニ
ホテルニューオータニ
測 位 可 能 時 間 率(3)都市部における測位可能時間率の結果 東京都赤坂の高層建築物の谷間に観測点を設定する。観測点の位置とその周囲の建築物 の状況を図 1-2-6 に示す。また、この点におけるこの点における24 時間観測の GPS 衛 星と準天頂衛星のスカイプロットと1 時間毎の測位可能時間率を図 1-2-7 に示す。 図 1-2-7 都市部 24 時間観測の GPS 衛星と準天頂衛星のスカイプロット(上)と1時間毎 の測位可能時間率(下) (4)評価 山間部と都市部におけるスカイプロット図を観測点周囲の地形や建築物の図と比べると、 地形や建築物による測位衛星からの電波の遮蔽効果が正しく評価できていることが分かる。 これに対応して、衛星測位の幾何学的精度条件が大きく劣化している時間帯がみられる。 GPS 衛星だけの場合に比べ、準天頂衛星の補完により、山間部では測位時間率の大きな改 善がみられ、遮蔽領域が極端に広い都市部の赤坂では、測位時間率には、大幅ではないも のの、有意な改善がみられる。従って、衛星測位システム・シミュレータは、目的とする 機能が正しく動作していると評価できる。 21 17 15 13 11 12 16 18 20 22 23 100 50 0 24 1 2 3 4 5 6 7 8 9 10 14 19 時 % GPSのみ GPS+準天頂 測 位 可 能 時 間 率
1.3. 衛星測位システム・シミュレータ用の効率的入力インターフェースの開発と高速処理化ア ルゴリズムの開発 1.3.1. 衛星測位システム・シミュレータ用の効率的入力インターフェースの開発と高速処理化ア ルゴリズムの開発 1.3.1.1. 目的 次世代衛星測位システムを精密測量に応用する技術の開発においては、「衛星測位システ ム・シミュレータ」を用いて、現実的な観測条件を再現した数値模擬実験を行って測位精 度を予測評価する技術が必要である。そのため、1.2.1 において機能拡充された「衛星測位 システム・シミュレータ」を利用するにあたり、多様な測量環境を模擬したシミュレーシ ョンを効率的に設定し、高速処理が可能となるようにすることが重要である。そのため、 本事項では、「衛星測位システム・シミュレータ」に対する効率的な入力インターフェー スを開発し、観測量生成処理を高速化するアルゴリズムの開発を行う。 1.3.1.2. 効率的な入力インターフェースの設計 「衛星測位システム・シミュレータ」の入力設定を効率的に行うためのインターフェー スの開発としては、軌道生成や観測量の生成を行うための設定条件の作成を支援する機能 の追加と、特定の条件で設定された入力設定ファイルを参照して一部の条件を変更する処 理を行うインターフェース作成し、あるいは、そのような操作をバッチ処理化とすること を考える。 そこで、軌道生成及び観測値生成の条件設定方法として、以下の機能を改良し、あるい は、開発する。 ・条件設定ウィザード機能(改修) ・条件編集機能(新規) ・ケース追加機能(新規) 条件設定ウィザード機能は、主に新規条件を設定する時に利用されるものであり、既開 発の衛星測位システム・シミュレータの入力 GUI を改修して対応する。条件編集機能は、 設定条件をテキスト形式で編集するものであり、設定条件(入力値の型及び範囲、読み込 みファイルの有無など)を確認し、あるいは、いくつかの設定条件をまとめて変更する場 合の条件設定を効率化する。ケース追加機能は、設定されている条件の一部だけを変える 場合に、自動的にこれを変更して別条件の設定ファイルを作成する。この機能を用いて、 類似するケースを複数設定することが効率的に実行可能となる。この機能の利用において は、変更する項目、例えば、誤差(誤差なし、白色雑音、ランダムウォーク、白色雑音+ ランダムウォーク)設定などの変更したい条件を別途用意する必要がある。また、作成済 みの生成条件ファイルを読み込み、観測量の生成に再利用できる機能を追加する。これに より、毎回同じ条件でデータ生成する場合の処理を効率化する。 この概念に基づき、シミュレータの入力設定、軌道生成、観測量生成の処理を行う GUI
機能を、軌道生成機能および観測値生成機能と独立させたものとして開発する。また、観 測値生成 GUI 機能は、観測値計算機能と、その前処理としての3つの機能(GrADS デー タファイル高度変換機能、DSM/DEM データファイルの方位角-高度角変換機能、海洋潮 汐変位計算機能)を独立の機能として持つ。このように、各機能を独立なものとすること で、GUI を利用せずにバッチ処理によって各機能を実行可能とする。これら各機能間の連 携には、指定形式のファイルをインターフェースとして利用する。図 1-3-1 に衛星測位シ ステム・シミュレータの機能構成を示す。 GUI機能 軌道生成機能 観測値生成機能 軌道計算機能 観測値計算機能 軌道/観測値生成 ドライバ機能 GrADS データファイル 高度変換機能 DSM/DEM データファイル AZ-EL変換機能 海洋潮汐変位 計算機能 軌道/観測値等 描画機能 軌道/観測値生成条件 ファイル作成機能 図 1-3-1 衛星測位システム・シミュレータの構成 1.3.1.3. 効率的な入力を支援する機能の追加 「衛星測位システム・シミュレータ」を用いた擬似的な衛星測位データの生成を支援 し、また、より現実的な模擬観測データの生成を行うために必要となる観測の誤差モ デルの高度化を行う。追加する機能は以下の通りである。 (1) 楕円体高算出機能 観測点の設定を効率化するため、入力した経度、緯度に対応する地表面位置の楕円体高 を内部推定し、入・出力する機能を追加する。これは、指定された経・緯度において、 内部に格納してあるジオイド高モデルとDEM から、それぞれ、ジオイド高、地表面の 標高を内挿することで実現する。 (2) 高速移動測量のデータ生成機能 高速移動測量による観測を模擬するデータを生成する機能を追加する。 (3) 観測点における遮蔽条件の描画機能 設定した観測点における電波の遮蔽条件を明示するため、スカイプロット形式による全 周の遮蔽図の描画機能を追加する。 (4) 衛星アンテナ位相中心の衛星重心に対するずれを考慮する機能
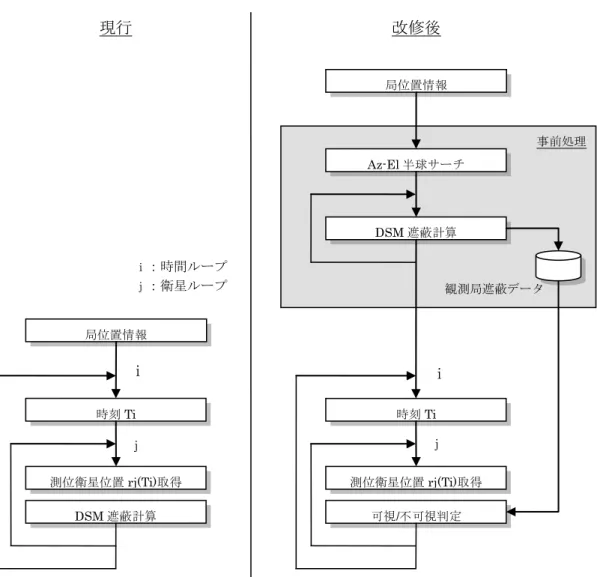
ている場合がある。このような条件を生成可能とするため、衛星アンテナの位相中心の ずれを考慮できる機能を追加する。 (5) 電離層高次効果の考慮を選択する機能 電離層高次効果の影響を評価する場合を想定し、この効果を考慮するか、しないかを選 択可能とする。 (6) 観測誤差モデルの高度化 このシステムを用いた衛星測位のシミュレーションをより現実的にするため、以下の観 測誤差モデルを選択可能とする。 ・ 軌道誤差 ・ 伝搬誤差 誤差のモデルは、つぎのいずれかを選択可能とし、その大きさは使用者が設定する。 ・ 誤差無し ・ 白色誤差 ・ ランダムウォーク誤差 ・ 白色誤差+ランダムウォーク誤差 (7) 観測時間設定の簡易化 観測日だけによる観測期間の指定を可能とし、その場合には、時刻を正時正分正秒を指 定したものとして処理する。また、測位解析に用いる精密測位解析ソフトウェアに対す る入力形式に適合させるため、軌道暦ファイル(SP3 形式)と観測量ファイル(RINEX 形式)の出力を観測日ごとに分け、GPS 時における正時正分正秒から記録した出力フ ァイルとする。 (8) 新しい測位信号L5 対応機能と追加 近代化GPS などに対応させるため、観測量ファイルの形式として RINEX のバージョ ン2.11(DRAFT)に準拠し、L5 帯に相当する測位信号の生成を可能とする。 1.3.1.4. 処理の高速化アルゴリズムの開発 「衛星測位システム・シミュレータ」を用いて多様な観測条件に対する数値模擬実験を 実行する場合、非常に多様な観測データ生成が必要となる。そのようなデータ生成を効率 化するため、つぎの2つの処理について、高速化を実現するアルゴリズムを開発する。 (1) 遮蔽条件の計算処理 「衛星測位システム・シミュレータ」における観測量生成では、測位衛星の可視性につ いてDEM や DSM を用いた遮蔽条件を計算する。この処理は、DSM を用いて観測時 刻毎に逐次計算する方法では、非常に多大な処理時間を要する。そこで、DSM データ ファイルの入出力部分を改良し、また、観測点ごとの遮蔽条件をデータファイルとして 格納し、再利用可能とする。図 1-3-2 に、アルゴリズム改良の前と後での処理方法の比 較を示す。
図 1-3-2 DSM を用いた遮蔽計算のアルゴリズム比較 (左)改修前、(右)改修後。 (2) 気象データ(GrADS 形式)を用いた対流圏遅延のレイトレーシング計算処理 気象条件の違いによる観測量データの生成を高度化するため、「衛星測位システム・シ ミュレータ」では、気象データを用いてレイトレーシングによる対流圏遅延量の計算が 可能となっている。GrADS の標準形式のデータでは、緯度、経度、P 面気圧のグリッ ドデータが提供される。これを、緯度、経度、高度の形式に変換し、各P 面気圧の平均 高度で格納し、レイトレーシングを行う場合には、これをメモリ上に格納して処理する 方法を用いる。この方法によるデータ変換の概念を図 1-3-3 に示す。対流圏における測 位電波は、大気密度が小さくなっている高い高度においては屈折の影響が小さくなる。 従って、レイトレーシングの処理において、積分処理の時間刻みを高い高度の領域で大 きくさせることにより、精度を劣化することなく計算処理を高速化できる。そこで、レ イトレーシングのアルゴリズムにおいて、その積分刻み幅を可変とする改修を行う。 事前処理 時刻Ti 測位衛星位置rj(Ti)取得 DSM 遮蔽計算 局位置情報 時刻Ti 測位衛星位置rj(Ti)取得 可視/不可視判定 局位置情報 Az-El 半球サーチ DSM 遮蔽計算 観測局遮蔽データ i j i j 現行 改修後 i : 時間ループ j : 衛星ループ i:時間ループ j:衛星ループ i i j j
GrADS の各グリッドで各 P 面気圧平均高度を挟む 2 点を検索し、これらの高度における 気圧P, 気温 T, 相対湿度 RH を補間し、新しい GrADS データを作成する。このとき GrADS 制御ファイルも書き換える 対象位置を挟む2 面でそれぞれ双一次内挿を行い、高度方向に対して線形補間を行う。なお、 気象データは既にメモリ上に格納されている。 図 1-3-3 GrADS 気象データのグリッド化処理 1.3.1.5. 性能確認:数値模擬実験 処理の高速化が図られ、開発された入力インターフェースを統合した「衛星測位システ ム・シミュレータ」の性能を確認するため、山間部と都市部における静止測量とその周辺 での高速移動測量に関する数値模擬実験を行い、遮蔽プロットの描画と測位解の推定を行 う。なお、誤差モデルとしては、受信機時計について 2 次多項式モデル、伝搬経路上での 観測誤差として白色誤差を仮定する。この場合、L1 と L2 の2つの周波数における誤差を × ×
(Pu, Tu, RHu, Hu)
(Pd, Td, RHd, Hd) STEP 1(事前処理) 各P 面気圧平均高度 STEP 2(対流圏遅延計算処理) × 対象緯度/経度/高度
同期させた白色誤差とし、伝搬経路上で系統的な誤差が含まれるものを用いる。 (1) 静止測量の場合 観測エポックの間隔を30 秒とする。はじめに、都市部(赤坂)では DSM、山間部では DEM を考慮した遮蔽条件をスカイプロットとして描画する。図 1-3-4 に、都市部(赤 坂)における遮蔽状態を示す。高層建築物が観測点の極近傍に位置しているため、観測 点からみて南側と西側では、ほとんどの高度角で遮蔽されていることが分かる。 図 1-3-4 都市部(赤坂)における DSM を用いた遮蔽計算結果 方位角ごとに遮蔽される領域の最大高度角を赤線で表示している。
Position errors (Akasaka; GPS only; random; 1-hour obs)
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0 4 8 12 16 20 Time (hour) E rr o r (m) North - South East - West Up - Down 図 1-3-5 都市部(赤坂)における 1 時間毎の測位解誤差(GPS だけの場合) つぎに、この点で二周波の観測を4 時間行った条件を想定し、1 時間のデータごとに求 めた測位解を、GPS だけの場合と GPS に準天頂衛星が加わった場合について求める。 こうして得られた測位解の誤差を、それぞれ、図 1-3-5 と図 1-3-6 に示す。 GPS だけの場合と GPS に準天頂衛星が加わった場合とも、いずれの時間帯においても
解が大きくずれていることが分かる。測位解が各成分とも10cm 以内で得られている時 間帯では、GPS だけの場合では水平成分では約 6cm を超える誤差が散見されるが、準 天頂衛星が追加されると約2cm 以内に納まっている、準天頂衛星による GPS 補完効果 の例を示している。
Position errors (Akasaka; GPS+QZSS; random; 1-hour obs) -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0 4 8 12 16 20 Time (hour) E rr o r (m) North - South East - West Up - Down 図 1-3-6 都市部(赤坂)における 1 時間毎の測位解誤差(GPS+QZSS の場合) 山間部(岐阜県東部)の場合、地形による遮蔽効果は図 1-3-7 のとおりである。この場 所では、観測点からみて、南東から南を経て西方向で遮蔽効果が現れている。 図 1-3-7 山間部(岐阜県東部)における DEM を用いた遮蔽計算結果 表現方法は図 1-3-4 と同じである。 この点についても、都市部(赤坂)と同様の数値模擬実験を行う。1 時間のデータごと に求めた測位解の誤差を、GPS だけの場合と GPS に準天頂衛星が加わった場合につい て、それぞれ、図 1-3-8 と図 1-3-9 に示す。都市部の場合に比べると、遮蔽条件が少し 緩和されていることに対応して、測位解の誤差は、各成分とも小さくなっている。水平 成分に着目すると、GPS だけの場合には、誤差が 5cm を超える時間帯もみられるが、
準天頂衛星が加わると、最後の1 時間を除く、いずれの時間帯においても、水平成分の 誤差は 2cm 以下になっている。これは、山間部での測量における、準天頂衛星による GPS 補完効果の例を示している。
Position errors (Valley; GPS; random; 1-hour obs)
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0 4 8 12 16 20 Time (hour) E rr o r (m) North - South East - West Up - Down 図 1-3-8 山間部(岐阜県東部)における 1 時間毎の測位解誤差(GPS だけの場合)
Position errors (Valley; GPS+QZSS; random; 1-hour obs)
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0 4 8 12 16 20 Time (hour) E rr o r (m) North - South East - West Up - Down 図 1-3-9 山間部(岐阜県東部)における 1 時間毎の測位解誤差(GPS+QZSS の場合) (2) 高速移動測量の場合 観測エポックの間隔を1 秒とし、静止測量の場合に用いた観測点の近傍に、山間部では 10 点、都市部では 9 点の観測点を設定し、これらの点を高速移動測量する場合につい て、測位解を求める。ここでは、GPS に準天頂衛星が加わった場合について、各点に おける観測として、1 分、5 分、10 分の3通りを考える。
図 1-3-10 都市部(赤坂)に設けた高速移動測量点 背景写真の出典は google のホームページ。
Rapid Static Postitioning Error (Akasaka; 1 min obs.)
-5 -4 -3 -2 -1 0 1 2 3 4 5 1 2 3 4 5 6 7 8 9 Site E rror ( m ) North - South East - West Up - down 図 1-3-11 都市部(赤坂)での高速移動測量の測位解誤差(観測時間 1 分)
Rapid Static Postitioning Error (Akasaka; 5 min obs.)
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1 2 3 4 5 6 7 8 9 Site E rror ( m ) North - South East - West Up - down 図 1-3-12 都市部(赤坂)での高速移動測量の測位解誤差(観測時間 5 分)
Rapid Static Postitioning Error (Akasaka; 10 min obs.) -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1 2 3 4 5 6 7 8 9 Site E rror ( m ) North - South East - West Up - down 図 1-3-13 都市部(赤坂)での高速移動測量の測位解誤差(観測時間 10 分) 都市部(赤坂)における高速移動測量点は、図 1-3-10 に示す位置に設定した。これら の点において、観測時間を1 分、5 分、10 分とした場合に得られる測位解の各成分の誤 差を、それぞれ、図 1-3-11、1-3-12、1-3-13 に示す。ここでは遮蔽条件が非常に悪い ため、数十cm を超える誤差を持つ場合が多くなっている。なお、観測時間の長短によ り、ここの観測点での観測時刻は異なっていることを注意しておく。 つぎに、山間部(岐阜県東部)における高速移動測量の例を示す。峡谷沿いに設定した 観測点の位置を図 1-3-14 に示す。観測時間を1 分、5 分、10 分とした場合に得られる 測位解の各成分の誤差を、それぞれ、図 1-3-15、1-3-16、1-3-17 に示す。山間部では、 1 分の観測では誤差が 10cm を超えているが、観測が 5 分、10 分の場合には誤差が数 cm で得られるものもある。 図 1-3-14 山間部(岐阜県東部)に設けた高速移動測量点
Rapid Static Postitioning Error (Valley; 1 min obs.) -5 -4 -3 -2 -1 0 1 2 3 4 5 1 2 3 4 5 6 7 8 9 10 Site E rror ( m ) North - South East - West Up - down 図 1-3-15 山間部(岐阜県東部)での高速移動測量の測位解誤差(観測時間 1 分)
Rapid Static Postitioning Error (Valley; 5 min obs.)
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1 2 3 4 5 6 7 8 9 10 Site E rr o r (m) North - South East - West Up - down 図 1-3-16 山間部(岐阜県東部)での高速移動測量の測位解誤差(観測時間 5 分)
Rapid Static Postitioning Error (Valley; 10 min obs.)
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1 2 3 4 5 6 7 8 9 10 Site E rr o r (m) North - South East - West Up - down
(3) 評価 処理の高速化が図られ、開発された入力インターフェースを統合した「衛星測位シス テム・シミュレータ」は、ここで紹介したもののほかにも行った模擬実験の結果から、 多様な観測条件の生成を高速な処理で、かつ、効率的に行うことが確認された。また、 DSM を用いた遮蔽効果の計算やレイトレーシングの処理時間も大幅に向上しているこ とが実現された。山間部や都市部における静止測量と高速移動測量の例では、数値模 擬実験から得られた幾何学的条件に基づく測位精度の結果(GPS 衛星だけの場合に比 べ、準天頂衛星の補完により、山間部では測位時間率の大きな改善がみられ、遮蔽領 域が極端に広い都市部の赤坂では、測位時間率には、大幅ではないものの、有意な改 善がみられる)に対し、測位精度の評価から準天頂衛星によるGPS 補完効果の例が示 された。従って、衛星測位システム・シミュレータ用の効率的インターフェースの開 発と処理高速化アルゴリズムの開発は、所要の目的を達成していると評価できる。な お、ここで用いた誤差の大きさは過大であり、現実の測量をそのまま再現しているも のではない。そのため、ここで紹介した数値模擬実験による測位精度は現実的な測位 誤差を直接表していない。
2 準天頂衛星を用いた精密測量作業マニュアル(案)の検討
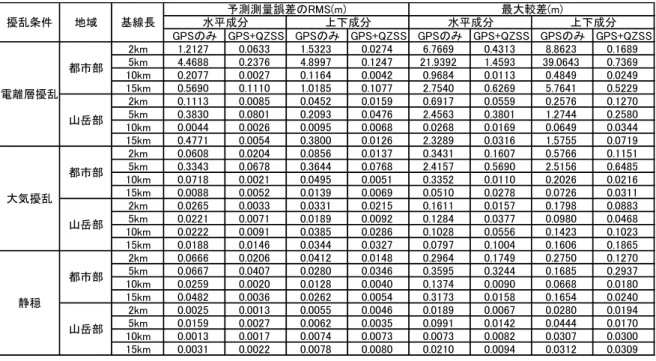
2.1 GPS 衛星の補完効果に関する精密測量作業マニュアル(案)の検討 2.1.1 はじめに 我が国が開発した準天頂衛星システム(QZSS)は、常に最低1機の衛星が全国の天頂付 近に配置し、GPS と互換な測位信号を送信することによる測位可能性の向上と GPS 衛星 に対する測位補正情報を配信することによる精度向上を図るものである。この準天頂衛 星システムは、我が国の独自技術により進められている。 準天頂衛星に関する研究開発は、文部科学省、総務省、経済産業省、国土交通省の 4 省が中心となって取り組んでおり、その中で国土地理院を含む国土交通省関係4研究機 関(電子航法研究所、国土技術政策総合研究所、国土地理院、交通安全環境研究所)で は、準天頂衛星による高精度測位補正技術の研究開発を担当している。国土地理院は、 国土交通省総合技術開発プロジェクト「準天頂衛星による高精度測位補正に関する技術 開発」に参画し、測量向けの応用として、①準天頂衛星測位・通信システムの精密測量 への応用技術の開発、②次世代電子基準点に関する研究開発、の2つの課題に取り組ん でいる。 上記課題のうち①においては、準天頂衛星等の次世代衛星システムを用いた精密測量 の応用技術について数値模擬実験を行い、それによる測量精度評価を通じて、衛星の打 ち上げ前に測量作業規程(案)をとりまとめることを目標としている。そのため我々は、 次世代衛星測位システムが登場する前に数値模擬実験により測量精度の予測評価を行う ため、これらの衛星測位システムによる観測を計算機上で模擬的に再現するソフトウェ ア「衛星測位システム・シミュレータ」(Satellite Positioning System Simulator:以下 「SPSS」という。)の開発を行うとともに、SPSSが精密測量への応用に使用可能な性能 となるように、伝搬遅延モデルの高精度化や衛星電波の遮蔽効果の精密化等の高度化の 研究を行い、ソフトウェアの改良を行ってきた。 今回の技術開発は、既開発のSPSSを用いて数値模擬実験を行い、それによる測量精度 評価を通じて測量作業規程(案)をとりまとめることを目標とする。そのため、まず現 実的な測量を再現するための誤差付与の手法について調査した。次に数値模擬手法によ り測量精度の予測評価を行い測量作業規程(案)を作成するために、数値模擬実験を行 うべき条件や適切な評価手法等について検討し、数値模擬実験の作業指針として取りま とめた。それをうけてスタティック法による基準点測量における準天頂衛星の補完効果 に関する評価を行い、その評価結果を踏まえ、「国土交通省公共測量作業規程における基 準点測量のスタティック法についての運用基準(案)」(以下「運用基準(案)」という。) として、準天頂衛星システムを併用した場合の観測の運用基準について取りまとめた。 この資料は、本技術開発で行う数値模擬実験について、基本的な考え方やそれに基づ いて行った評価の概要を説明資料としてとりまとめたものである。2.1.2 技術開発の基本方針 本技術開発全体の目標は、準天頂衛星等の次世代衛星システムを用いた精密測量の応 用技術について数値模擬実験を行い、それによる測量精度評価を通じて、衛星の打ち上 げ前に測量作業規程(案)をとりまとめることである。 本技術開発でいう作業規程(案)とは、特に基準点測量のスタティック法について、 準天頂衛星とGPS を併用した場合の補完効果の観点から、準天頂衛星と GPS を併用し た場合の運用基準についてとりまとめたものである。実際の作業規程は、準天頂衛星シ ステムが正式運用された後に、実観測における測位実験結果の評価をもとにして策定さ れるべきものであるが、本作業規程(案)は、そのような評価を行う際の調査計画の策 定や、評価作業を効率的に実施するために活用されるものを期待するものである。 数値模擬実験に際しては、観測状況として対流圏の状態および電離層の状態、および 遮蔽条件を考慮し、幅広い条件下において測位衛星観測をできるだけ再現した数値模擬 実験を行う手法の開発を行う。そのため、実際のGPS 観測データとの比較を通じて、多 様な観測状況下において、できるだけ実測に近い測量条件による観測データを再現する ための適切な誤差付与の手法について検討を行った。対流圏の状態および電離層の状態 について、完全に実観測を表現することは困難であるが、大局的な遅延量をモデルで与 え、表現できない部分については白色雑音で与え、その振幅を実測データから推定する、 という方法で、それぞれの擾乱状態を適切に表現できるようにした。また、遮蔽条件に ついては、地形遮蔽については数値標高モデル、地物遮蔽については数値表面高モデル を用い、現実的な遮蔽を表現した。次に、実際に数値模擬実験を行い、生成された模擬 観測データを汎用のGPS 解析ソフトウェアで解析して基線解を推定し、基線の各成分に ついて数値模擬実験で与えた真値との差を求めた。(以後、「予測測量誤差」という。)さ らに、準天頂衛星の有無による予測測量誤差の違いを準天頂衛星の補完効果としてとり まとめるとともに、DOP 値、基線解の標準偏差などの指標が、確実に制限内の解を得る ための観測の運用基準として設定可能かを検討した。また現行の規程で運用基準として 採用されている最低高度角制限が、準天頂衛星を併用した観測の際に緩和できるかどう かについても検討した。数値模擬実験に関して、観測条件の設計や評価手法の概要につ いて2.1.4 に、準天頂衛星の補完効果の評価およびその作業規程(案)としてのとりまと めを2.1.5 にまとめる。 2.1.3 観測データを再現するための信号設計 2.1.3.1. 基本的な考え方 一般的に実測のGPS 観測は、以下のモデルで表現されると仮定する。 (1)衛星―受信機間の幾何学的距離 (2)衛星搭載原子時計誤差
(4)電離層モデルで与えることができる電離層遅延量 (5)受信機時計誤差 (6)対流圏遅延量、電離層遅延量のうち(3)、(4)で表現できないもの (7)受信機計測誤差 (8)マルチパス等の受信環境に起因する誤差 SPSS では上記(1)、(3)、(4)がモデル化されており、(2)及び(5)について は時間履歴データとして取り込むことができる。この(1)~(5)までを用いてSPSS で観測データを生成し、これを基準擬似 GPS 観測データとする。(6)に相当する誤差 を基準擬似 GPS 観測データに付加することで、実測 GPS 観測データの測位解を再現す る擬似データを生成することとする。 (6)に相当する誤差については便宜的に白色雑音として与えることとし、その振幅 は、基準擬似GPS 観測データと実測 GPS 観測データとの差から推定することとした。 以下に推定の手法と結果について記載する。 なお、(7)の誤差は干渉測位方式においては一般的に非常に小さいので今回は無視し た。また、(8)については、受信環境の悪い場所では大きな寄与を持つものの、場所ご とに大きく変わるものであること、また、モデル化が難しいものであることから、今回 は取り扱わないこととする。 2.1.3.2. 対流圏遅延量および電離層遅延量の特徴 地球大気のなかでGPS の電波伝搬に顕著な影響を及ぼすのは電離層と対流圏である。 これらが電波伝搬に及ぼす影響は、系統的な遅延と白色雑音的ゆらぎで記述される。 電離層による遅延とゆらぎの絶対量は、観測周波数の二乗に逆比例する性質がある。 そして擬似距離に対して電波は群速度(信号速度)で伝搬し遅延(delay)が発生するが、 搬送波位相に対しては電波は位相速度で伝搬し負の遅延(advance)が発生する。 電離層による遅延量は、擬似距離と搬送波で正負が反対であるが絶対値は実質的に同 一であって、その大きさは電離層活動状態、すなわち太陽活動、地域、季節、昼夜によ って大きく変化する。日本付近では太陽活動極大期の昼間、天頂方向でL1 帯では 15 m くらいの衛星距離誤差(搬送波では短縮、擬似距離では延び)、太陽活動極小期の深夜は 0.2 m 前後の誤差がある。また、根源的には太陽活動に起因する電離層の突発変動のため、 急激な遅延変化がある。 対流圏による遅延とゆらぎは、実質的に周波数依存性はない。また群速度と位相速度 が一致するため、擬似距離、搬送波位相とも正の遅延となる。 対流圏による遅延は天頂方向で約2.3 m 程度であって、このうち 2 m 前後が乾燥空気、 残りが水蒸気による。水蒸気成分は日本付近では最小0.05 m、最大 0.4 m 程度である。 変動はおもに気象現象との関連が強く、日周変化と季節変化が主なものである。強い前 線通過などのため、急変化はあるものの、衛星斜距離上で量的には電離層ほど激しいも
のではない。 2.1.3.3 白色雑音の振幅推定 白色雑音の振幅の推定には、実観測GPS 観測データと、気象および電離層モデルによ る伝搬遅延を考慮した基準擬似GPS 観測データとの差を用いる。 典型的な実観測データとして、表 2-1-1 に示す 5 地区それぞれにおける隣接する 3 点 の電子基準点のものを使用した。それぞれの地区の電子基準点相互間距離は、最短で約 14.5 km、最長で約 28.2 km である。また、解析対象日として ・対流圏擾乱量を推定するため、 2004 年 1, 3, 5, 7, 9, 11 月で各月の 15 日(GPS 時/日)(通算日 15, 75, 136,197, 259, 320)の各 1 日 ・電離層擾乱量を推定するため、 2005 年 8 月 24 日(通算日 236) を選定した。 表 2-1-1 大気擾乱条件設定のための実観測データを取得した地域と電子基準点 地 区 観測局(電子基準点番号) 北海道 地区 旭川 (960508) 旭川2 (020862) 深川 (020865) 東 北 地区 山辺 (970803) 上山 (960557) 白鷹 (950199) 関 東 地区 勝浦 (93041) 大多喜 (960756) 千葉大原(950226) 中 国 地区 広島福山 (960767) 広島福山2 (011032) 御調 (021033) 沖 縄 地区 本部 (950496) 宜野座 (960740) 沖縄石川(960741) さらに、基準擬似GPS 観測データの作成に際しては、気象、および電離層モデルとし て、 ・気象モデル(気象庁メソ客観モデル)
・電離層モデル(IGS-CODE モデル)(International GNSS Service, Center of Orbit Determination in Europe) を使用した。 白色雑音の振幅推定は、対流圏擾乱の場合は、電離層遅延量の影響を消去するためL3 位相距離差を用い、また、電離層擾乱の場合は、対流圏遅延量の影響を消去するためL4 位相距離差を用いる。ただし、対流圏擾乱の際に観測点毎、衛星毎のL3 位相距離差を用 いると、受信機時計の推定誤差の影響を排除できない。また、電離層擾乱の際に観測点 毎、衛星毎のL4 位相距離差を用いると、電離層変動の空間相関を無視していることに相 当し、推定される誤差が過大になってしまう。以上の問題を避けるため、誤差振幅の推
・衛星間L3 搬送波一重位相距離差(対流圏擾乱) ・観測点間L4 搬送波一重位相距離差(電離層擾乱) によって行うこととした。 これより以下の記号を用いることとする。 L1、L2: 搬送波位相距離(m) = Φi(搬送波位相(cycle))×(c/fi) L3: イオンフリー搬送波位相距離(m) L4: 電離層残差/ (m) f1 : Φ1 の周波数 f2 : Φ2 の周波数 c : 光速 なお、L3 は L1 と L2 の線形結合をとり電離層による伝搬遅延を消去したものである。 L3 は L1 と L2 を搬送波位相距離としてつぎの式で表される
)
L
f
L
f
(
f
f
1
L
2 12 1 22 2 2 2 1 3
(式 2.1.1) 一方L4 は電離層残差とも呼ばれ、L1、L2 搬送波位相距離の差である。電離層遅延とバ イアスが残り、衛星までの距離、対流圏遅延などが消去されている。 2 1 2 1 4L
L
f
c
2
f
c
1
L
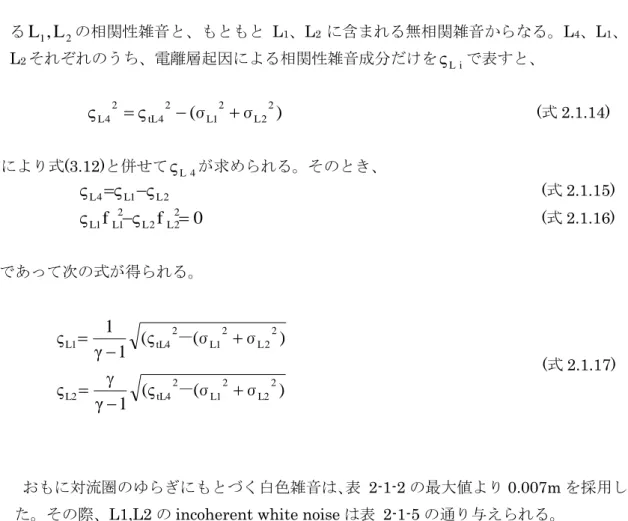
(式 2.1.2) 2.1.3.4 対流圏遅延 対流圏を扱うときは電離層遅延が消去されているイオンフリー搬送波位相距離 L3 を 用いる。そして、二つの衛星をGi、Gj として、 ⊿L3Gi=(L3 Gi(実測データ)-L3 Gi (基準模擬データ)) (式 2.1.3) ⊿L3Gj=(L3 Gj(実測データ)-L3 Gj (基準模擬データ)) (式 2.1.4) から衛星間一重位相距離差 δ(⊿L3)=⊿L3Gi-⊿L3Gj (式 2.1.5) が作られる。 これをもとにして、 ・いろいろな原因による衛星間一重位相差の変動を消去するため、移動平均よりの残 差を純雑音として抽出、移動平均の時間幅は±10分・衛星天頂角のcosを乗じて天頂遅延に引き直す。ただし、 1) 天頂角は2衛星の平均値を用いる。 2) エポック毎に平均天頂角で補正する。 ・移動平均からの残差の標準偏差を計算 ・原則として二つの衛星間の夾角が60度以下と60度以上の二組を使用 こうして得られた天頂換算のゆらぎ(白色雑音)が表2-1-2である。 シミュレーションによる精度評価を行う際は安全を見て0.007mを用いることとする。 この数値はあくまでもL3に対するもので、もとの搬送波L1、L2については後に示す。 表 2-1-2 推定された対流圏遅延誤差の白色雑音の振幅 観測点 月日 今回値 旭川 7/15 0.0057m 旭川 11/15 0.0052m 本部 7/15 0.0062m 本部 11/15 0.0062m 2.1.3.5 電離層遅延 電離層遅延を推定する際には、対流圏遅延が消去されている電離層残差搬送波L4を用 いる。その際、電離層の空間相関を考慮するため、観測点(受信機)間一重位相差を使 用する。 電離層の特質として、静穏時と擾乱時では系統遅延、ゆらぎともその様相が一変す るので、それぞれの状態での解析が必要である。 二つの観測点をKi、Kjとして、 ⊿L4Ki=(L4 Ki (実測データ)-L4 Ki (基準模擬データ)) (式 2.1.6) ⊿L4Kj=(L4 Kj (実測データ)-L4 Kj (基準模擬データ)) (式 2.1.7) から観測点間一重位相距離差 δ(⊿L4)=⊿L4Ki-⊿L4Kj (式 2.1.8) が作られる。 これをもとにして、 ・いろいろな原因による受信器間一重位相差の変動を消去するため、移動平均からの 残差を純雑音として抽出する。
・エポック毎に天頂角で補正する。 ・移動平均から残差の標準偏差を計算する。 図 2-1-1 、図 2-1-2は、図の上に記した番号のGPS衛星の電離層残差L4について、2005 年8月24日GPS時02:00~03:00(電離層嵐発生8時間前)と10:00~11:00(電離層嵐発生 中)の沖縄本部における電離層残差の観測値とCODEモデルを付加した模擬データとの 差(Obs.-Sim(誤差付加))の例である。時間帯が異なるので、衛星番号は異なっている。 G5 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 2: 00 :0 0 2: 05 :0 0 2: 10 :0 0 2: 15 :0 0 2: 20 :0 0 2: 25 :0 0 2: 30 :0 0 2: 35 :0 0 2: 40 :0 0 2: 45 :0 0 2: 50 :0 0 2: 55 :0 0 GPST m G22 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 2: 00 :0 0 2: 05 :0 0 2: 10 :0 0 2: 15 :0 0 2: 20 :0 0 2: 25 :0 0 2: 30 :0 0 2: 35 :0 0 2: 40 :0 0 2: 45 :0 0 2: 50 :0 0 2: 55 :0 0 GPST m 図 2-1-1 2005年8月24日 沖縄本部の電離層残差(Obs.-Sim(誤差付加))電離層嵐発生8 時間前 G3 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 10 :0 0: 00 10 :0 5: 00 10 :1 0: 00 10 :1 5: 00 10 :2 0: 00 10 :2 5: 00 10 :3 0: 00 10 :3 5: 00 10 :4 0: 00 10 :4 5: 00 10 :5 0: 00 10 :5 5: 00 GPST m G19 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 10 :0 0: 00 10 :0 5: 00 10 :1 0: 00 10 :1 5: 00 10 :2 0: 00 10 :2 5: 00 10 :3 0: 00 10 :3 5: 00 10 :4 0: 00 10 :4 5: 00 10 :5 0: 00 10 :5 5: 00 GPST m 図 2-1-2 2005年8月24日 本部の電離層残差(Obs.-Sim(誤差付加))電離層嵐中 (上図と縦軸目盛りの違いに注意) ここで示した例とともに、すべての観測地点、衛星、時間帯に概ね共通して次のこと が言える。すなわち、 ・IGS CODEモデルは、電離層が比較的静穏な状態でもL1遅延にして10 cm以上実 測データと較差があり、必ずしも実際の電離層状態を表現していない。 ・電離層嵐のような異常状態では、CODEモデルと実際の差はピーク値(p-p)でmの 桁に達する。
・観測地点によって、その時間変化にかなりの相違がある。 ・沖縄で電離層嵐が発生している時間帯は、北海道にも大きな変動がある。 ・ただし、北海道と沖縄では変化の様相はかなり異なる。 こうして得られた電離層擾乱の全体像を表 2-1-3 に示す。この表から中時間変動の最 大値を誤差量として表 2-1-4 にまとめた。 これらの値はあくまでもL4 に対するもので、もとの搬送波 L1、L2 については後に示 す。 表 2-1-3 電離層変動現象の⊿L4 への影響量 表 2-1-4 誤差量(L4) 時 期 変動 δ(⊿L4)のRMS L4誤差振幅 静穏時 中時間変動 0.010m 0.007m 擾乱時 中時間変動 0.170m 0.120m ただし、求められたL4誤差振幅には、L3で推定されたL1とL2の無相関誤差が伝搬した 寄与が含まれているので、この分を差し引く必要がある。この寄与分を差し引いた値が表 2-1-6のL4の値となる。 静穏時 p-p振幅 rms値 p-p/km rms/km 周期 継続時間 解析時間が短かったため評価不能 領域 不確かであるが、ほぼ、擾乱時と同じ 擾乱時 p-p振幅 rms値 p-p/km rms/km 周期 継続時間 領域 2.2mm 0.4mm 11.1mm 7.6mm 突発的現象 短時間変動 短時間変動の急始 突発 上空視界の立体角で1~2 st-rad、 細かい構造がある 2~3時間 < 30 s 2~10 mm 中時間変動 現象なし ~200mm L4値の急変 ~200mm 15~58 mm 1~2 mm 1.2~2.0 mm < 30 s 30~50mm 2~3時間 5~10分 ~250mm 37~170 mm 5~10分
前節で求めた対流圏、電離層の白色雑音は、それぞれL3、L4 線形結合搬送波に対応 するものである。これを理論式をもとにもとのL1、L2 の寄与分に引き戻す操作を行う。
L3(イオンフリー搬送波)と L4(電離層残差)から L3 white noise と L4 white noise が推定され、それぞれ L3 からは L1&L2 incoherent white noise(m)、L4 からは L1 coherent white noise(m)と L2 coherent white noise(m)に分配される。こうして求めた白 色雑音を模擬データに付与した。 求められたL3、L4 の白色雑音は以下のように L1、L2 に配分する。ただしαはL1 とL2の白色雑音量の比とする。 a) 観測量