日機連21先端-12
平成21年度
小型衛星への赤外センサ搭載可能性に関する 調査研究報告書
平成22年3月
社団法人 日 本 機 械 工 業 連 合 会 財団法人 資源探査用観測システム・
宇宙環境利用研究開発機構
この事業は、競輪の補助金を受けて実施したものです。
http://ringring-keirin.jp
序
我 が 国 機 械 工 業 に お け る 技 術 開 発 推 進 は 、も の づ く り の 原 点 、且 つ 、輸 出 立 国 維 持 に は 必 須 条 件 で す 。
し か し な が ら 世 界 的 な 経 済 不 況 脱 出 で 先 進 国 の 回 復 が 遅 れ て い る 中 、中 国 を 始 め と す る ア ジ ア 近 隣 諸 国 の 工 業 化 の 進 展 と 技 術 レ ベ ル の 向 上 は 進 ん で い ま す 。 そ し て 、我 が 国 の 産 業 技 術 力 の 弱 体 化 な ど 将 来 に 対 す る 懸 念 が 台 頭 し て き て お り ま す 。
こ れ ら の 国 内 外 の 動 向 に 起 因 す る 諸 課 題 に 加 え 、環 境 問 題 、少 子 高 齢 化 社 会 対 策 等 、 今 後 解 決 を 迫 ら れ る 課 題 も 山 積 し て お り 、 こ の 課 題 の 解 決 に 向 け て 、 技 術 開 発 推 進 も 一 つ の 解 決 策 と し て 期 待 は 高 ま っ て お り 、機 械 業 界 を あ げ て 取 り 組 む 必 要 に 迫 ら れ て お り ま す 。
こ れ か ら の グ ロ ー バ ル な 技 術 開 発 競 争 の 中 で 、我 が 国 が 勝 ち 残 っ て ゆ く た め に は 、も の づ く り 力 を さ ら に 発 展 さ せ て 、新 し い コ ン セ プ ト の 提 唱 や ブ レ ー ク ス ル ー に つ な が る 独 創 的 な 成 果 を 挙 げ 、世 界 を リ ー ド す る 技 術 大 国 を 目 指 し て ゆ く 必 要 が あ り ま す 。幸 い 機 械 工 業 の 各 企 業 に お け る 研 究 開 発 、技 術 開 発 に か け る 意 気 込 み に か げ り は な く 、方 向 を 見 極 め 、ね ら い を 定 め た 開 発 に よ り 、今 後 大 き な 成 果 に つ な が る も の と 確 信 い た し て お り ま す 。
こ う し た 背 景 に 鑑 み 、当 会 で は 機 械 工 業 に 係 わ る 技 術 開 発 動 向 調 査 等 の 補 助 事 業 の テ ー マ の 一 つ と し て 財 団 法 人 資 源 探 査 用 観 測 シ ス テ ム ・宇 宙 環 境 利 用 研 究 開 発 機 構 に「 小 型 衛 星 へ の 赤 外 セ ン サ 搭 載 可 能 性 に 関 す る 調 査 研 究 」を 調 査 委 託 い た し ま し た 。本 報 告 書 は 、こ の 研 究 成 果 で あ り 、関 係 各 位 の ご 参 考 に 寄 与 す れ ば 幸 甚 で す 。
平 成 2 2 年 3 月
社 団 法 人 日 本 機 械 工 業 連 合 会 会 長 伊 藤 源 嗣
はしがき
我が国は、これまで多くの地球観測衛星の打ち上げ及び運用を行ってきており、地上か らは得られない宇宙からの各種画像データは、環境や資源等の地球上の様々な事象を観測 するために広く利用されています。当財団におきましても、1992 年に打ち上げられた JERS-1 搭載の OPS 及び SAR を始めとして、ADEOS 搭載の IMG、米国 Terra 搭載の ASTER、更 に 2007 年 1 月に打ち上げに成功した ALOS 搭載の PALSAR 等、多くの地球観測センサを開発 し、地球環境の継続的な監視、災害時のグローバルな状況把握等に貢献してきております。
人工衛星から取得した地球観測データを用いて様々な解析を行う衛星リモートセンシン グにおいては、電波から光の領域に渡る様々な波長の電磁波を画像データとして取得する イメージングセンサが重要な役割を果たしています。なかでも、熱赤外領域の波長の光を 画像として捉える赤外センサは、昼夜を問わず地球の熱的事象を観測することを可能とす るため、環境監視、資源探査、災害監視、気象観測等、社会の安全・安心にとって欠くべ からざるセンサとして活用されています。本調査研究は、当財団が開発し 1999 年 12 月に 打ち上げ後現在運用中の Terra 搭載 ASTER を構成する三つのセンサの一つであるサーマル イメージングセンサ(TIR)の後継を想定し、小型衛星への赤外センサの搭載可能性につい て、調査研究を実施したものです。
本報告書にまとめられた成果が、今後小型衛星搭載赤外センサの開発を行うに際しての 仕様設定等において、有用なデータを提供することができれば幸いです。
最後に、当財団法人資源探査用観測システム・宇宙環境利用研究開発機構に対して、本 調査研究の機会を提供いただいた、社団法人日本機械工業連合会、財団法人JKAならび に関係の方々に厚く御礼申し上げます。
平成22年3月
財団法人 資源探査用観測システム・宇宙環境利用研究開発機構 理 事 長 藤江 一正
先端-12
平成21年度 小型衛星への赤外センサ搭載可能性に関する調査検討委員会名簿
氏名 所属団体名 役職名
委員長 梅干野ほ や の 晁あきら 国立大学法人 東京工業大学 大学院総合理工学研究科 環境理工学創造専攻
教授
委 員 外岡 秀行 国立大学法人 茨城大学 工学部 情報工学科
准教授
委 員 丹下 義夫 独立行政法人 宇宙航空研究開発機構 宇宙利用ミッション本部
地球観測研究センター
技術領域 総括
委 員 山口 靖 国立大学法人 名古屋大学
大学院環境学研究科 地球環境科学専攻
教授
目次 序 (会長 伊藤 源嗣)
はしがき (理事長 藤江 一正)
委員会名簿 目次
1.調査研究項目・スケジュール 1
1.1 調査研究目的 1
1.2 調査研究体制 1
1.3 調査研究内容 2
1.4 調査研究項目・スケジュール 3
第1章 小型衛星と赤外センサの技術動向調査 4
1.1 小型衛星の技術動向調査 4
1.1.1 小型衛星システムの概要 4
1.1.2 小型衛星システムのトレンド 7
1.1.3 海外における小型衛星の利用 13
1.1.4 日本における小型衛星 22
1.2 赤外センサの技術動向調査 34
1.2.1 赤外線センサ素子 34
1.2.2 冷凍機調査 46
第2章 熱赤外画像の利用調査 48
2.1 熱赤外画像利用分野の現状の応用例調査 49 2.1.1 自然・資源観測分野での応用例 49
2.1.2 防災・監視分野での応用例 51
2.1.3 都市計画・農業生産分野での応用例 53 2.1.4 各分野における利用に向けた課題 54 2.2 各分野における利用面の将来の方向性調査 54
第3章 赤外センサの小型軽量化の検討 57
3.1 赤外センサの用途と必要性能 57
3.2 赤外センサの検討 61
3.2.1 小型・軽量化の検討 61
3.2.2 冷却素子を用いた赤外センサの検討(ケース1) 83 3.2.3 非冷却素子を用いた赤外センサの検討(ケース2) 93
3.3 開発課題の検討 114
第4章 まとめ 117
参考文献 119
1 1.調査研究項目・スケジュール
1.1 調査研究目的
衛星リモートセンシングにおいて、衛星搭載赤外センサから得られる熱赤外バン ドの地球観測データは、昼夜を問わず地表面の熱的事象の観測を可能とするため、ヒ ートアイランドや港湾部での工業用水の温水排出・汚染などの環境監視、山火事や火 山噴火等の災害監視、石油・鉱物探査等の資源探査等様々な分野で広く利用されてお り、観測データの連続性及び更なる高分解能化など機能・性能の向上が求められてい る。また、現在 NASA の地球観測衛星 TERRA に搭載されている ASTER/TIR はミッション 運用期間が 10 年を超えており、その後継機の開発が期待されている。本調査研究にお いては、(1)国産で調達しうる小型衛星の衛星バス等の調査、(2)赤外線センサ素子の長 所・短所を整理し、実現可能な衛星搭載赤外センサ性能の調査と内外の小型熱赤外プ ロジェクトの技術動向調査、(3)赤外センサの小型・軽量化についての検討と課題を抽 出、及び(4)熱赤外画像のさらなる特徴と利用について検討を行い、小型衛星搭載の赤 外センサの今後の開発の方向性を明らかにすることを目的とする。
1.2 調査研究体制
本調査研究は図1の体制により実施した。
図1 調査研究体制
(財)資源探査用観測システム・宇宙環境利用研究開発機構(JAROS)
小型衛星への赤外センサ搭載可能性に 関する調査研究委員会
三菱電機(株) 日本電気(株) (社)日本機械工業連合会
(株) センテンシア 委託
再委託
2 1.3 調査研究内容
検討に当たっては、業務の一部を衛星搭載光学センサの製造ノウハウを有するメーカ に再委託し、本調査研究の支援作業を実施してもらう。また光学センサの有識者等による
「小型衛星への赤外センサ搭載可能性に関する調査研究委員会」を設置し、本業務内容に 関する意見を成果報告書に反映するものとする。
(1) 小型衛星及び赤外センサの技術動向調査
小型衛星に赤外センサを搭載するための前提を明らかにするため、国内外における小 型観測衛星システムについて最新の開発動向や技術動向の調査を実施する。また、赤外セ ンサ素子の調査を実施し、さらに、これら素子を使用した場合の衛星搭載赤外センサにつ いてセンサ性能の実現可能範囲、運用制限などに関しての調査・検討を実施する。
(2) 熱赤外画像の利用調査
熱赤外画像による資源探査の可能性、環境監視(火山噴火観測、都市熱環境観測、森 林火災観測、海面温度観測等)や災害監視(昼夜を問わない地震時の都市災害、土砂崩れ
、河川のはんらん、津波被害等の把握)、安心・安全分野への応用(昼夜を問わない飛翔体 発射の準備状況の把握、飛翔体発射後の早期警戒情報取得等))について調査する。調査を 行った各分野における利用面の将来の方向性に対し、小型衛星搭載熱赤外センサに要求さ れる仕様、低コスト化を可能とするシステム構成及びサブシステム仕様等を検討し課題を 抽出する。
(3) 赤外センサの小型軽量化の検討
赤外センサの小型・軽量化について検討し、小型衛星に搭載するために必要な技術開 発項目、実現可能性及び開発課題を抽出するとともに、現在利用できる技術で製作した場 合の赤外センサのセンサ性能等について検討する。
3 1.4 調査研究項目・スケジュール
調査研究内容の各項目について以下のスケジュールにて検討を実施した。
平 成 2 1 年
/
11 12
平 成 2 2 年
/
1 2 3
○
○
④TIRの利用と特徴
⑤委員会の開催
⑥報告書の作成・公表 半期別・月別
項目
下半期
①小型衛星の調査・検討
②赤外センサの調査・検討
③TIRの小型軽量化調査/検討
10
4 第1章 小型衛星と赤外センサの技術動向調査
ここでは、小型衛星に赤外センサを搭載するための前提を明らかにするため、国内外 における小型観測衛星システムについて最新の開発動向や技術動向の調査の結果について 述べる。また、赤外センサ素子及びこれら素子を使用した場合の衛星搭載赤外センサにつ いてセンサ性能の実現可能範囲、運用制限などに関する調査・検討結果を述べる。
1.1 小型衛星の技術動向調査 1.1.1 小型衛星システムの概要
(1)衛星サイズ/質量のトレンド
1950 年代から本格化した宇宙開発は 60 年代のアポロ計画、70 年代の冷戦構造下にお ける予算の増加などにより、劇的な技術の進歩を遂げた。その結果、ロケットの打ち上げ 能力の向上、ミッション機器の能力向上を達成し、衛星としては大型化の一途をたどって きた。しかし、大型衛星の相次ぐ失敗と宇宙予算の削減、さらに技術の進歩や衛星の民間・
新興国への展開により1990 年代に入ると衛星故障等のリスク低減要求などから、単一ミ ッション対応の小型衛星への要求、衛星の小型化、低コスト化の動向が顕著となった。
また、これら小型衛星打ち上げる比較的安価な打上げ手段を提供する民間企業が登場 するようになり、衛星の小型化とあいまって従来衛星を保有することを想定されていなか った発展途上国にまでユーザ層が広がるようになっている。衛星サイズ/質量のトレンド を図 1.1.1-1 に示す。
ロ ケcット の 打上能力増加
冷戦予算
冷戦終結 による予算 削減と 米国防対 象の局地戦への 移行
(小型宇 宙機による 迅速な配置要求)
リスク低減 強化 の要求
予算 削減とDODの動向 に触発 されたN ASAの小型化へ の取組 (SAMPEX,等)
日欧宇宙 機関の 小型化(FB C)への
取 組
大型宇宙機
ミッ シ ョン 機器の 搭載能力増強要 求
先端的小 型 軽量化技 術 (SDI /G LOM R/
Lightsat等)
小型軍事衛星 技術 の民生転 用等による 商用衛星事業 開始
小型衛 星打上手段の環 境整備
(低 コスト小型ロケット、空 中発射、複数 機同時打上・相 乗り等)
小型宇宙機
超小型宇宙機
1950 196 0 1970 1980 1990 2000 2010年
衛 星 の サ イ ズ
/ 重 量
It all begin small
L arge A perture M issions
軌道と周波数 の混雑
「SJAC 小型衛星に関する動向と応用の調査」報告会(04-2-10)資料による
図 1.1.1-1 衛星サイズ/質量のトレンド
5
(2)新しい小型衛星の位置付け
こうした衛星小型化の流れについて機能性能面とコスト/開発期間の両面で模式的に 図示すると図 1.1.1-2 のようにあらわされる。
機能・性能
大型衛星 新しい小型衛星 ・コスト削減
・これまでの衛星開発
・高機能化
コスト/開発期間
初期の小型衛星
機能・性能
大型衛星 新しい小型衛星 ・コスト削減
・これまでの衛星開発
・高機能化
コスト/開発期間
初期の小型衛星
図 1.1.1-2 小型衛星における機能・性能とコスト/開発期間の関係
初期の小型衛星はコスト/開発期間が従来の衛星に比べ圧縮されているのみの場合が 多かったが、最近の小型衛星のトレンドとしては、コストを安く、開発期間は短いままで 従来大型衛星で実現していた機能性能を有するものが出てきている。こうした高機能化、
高性能化に加えて小型のメリット生かしたアプリケーション(即時対応衛星、複数同時打 上げのコンステレーション等)による実利用目的の衛星開発に移行しつつある。
6
(3)小型衛星を選択する理由
こうした流れの中で小型衛星を選択する理由、及びそのメリット、デメリットについ て以下のように整理した。小型衛星採用の最大の理由は衛星大型化に伴う以下の項目のよ うなデメリットからの脱却である。
① 大型衛星は打上げコスト比率が大きい。(小型衛星⇒専用ロケット、ピギーバック)
② 大型衛星は開発期間が長くなる傾向があり、打ち上げ時には技術が陳腐化している 場合がある。
③ 大型で複数ミッションを有する衛星の場合、高信頼性が要求されるため、実績のな い新技術を採用せず、既存技術の改良程度となり、民生技術との差が拡大する傾向 にある。
④ 長期開発/衛星数減少/開発体制肥大化等に伴い開発コストの増大。
⑤ 大型で複数ミッションを有する衛星の場合、失敗時のリスクが大。
一方、小型衛星のメリットは上記大型衛星のデメリットの裏返しであり、加えて以下 のメリットがあると考える。
① 小型衛星は短期開発であることが多く、新規技術の宇宙実証が大型衛星より容易。
② 部品点数が大型衛星に比べ約1桁少ない傾向にあり、信頼性の確保がしやすい。
一方で、小型衛星のデメリットもある。
① サブシステムの小型化には多額の初期開発投資が必要。
② 発生電力、放熱面積の制約を受けやすく、高電力、高発熱機器搭載には不適当。
③ 大型アンテナなどの大型搭載物の採用は困難なケースが多く、ミッション性能上の 制約を受けやすい。
④ 搭載燃料に限度が有る。
小型衛星の採用に際してはこれらの特質を十分考慮したうえで採用を検討する必要が ある。
7 1.1.2 小型衛星システムのトレンド
(1)小型衛星の活用状況
上記の小型衛星の特質から大きさ、質量など実現できるミッションに制約があるが、
近年の技術の進展により小型衛星においても大型衛星で実現している性能に迫るものが出 現している。傾向を下図、下表に示す。
「第 18 回小型衛星会議 講演集」による
図 1.1.2-1 民需地球観測ミッションでの観測精度(可視光学センサの場合)
表 1.1.2-1 近年の小型衛星ミッションでの観測精度(可視光学センサの場合)
計画中 1m
DST/Germany
計画中 0.82m
EROS-B/Israel
計画中 2.5m
TOPSAT/UK
計画中 5m
Diamant-1/Germany
2008.8打上げ 6.5m
Rapid Eye/Germany
2000.12打上げ 1.8m
EROS-A1/Israel
ステータス GSD(m)
ミッション
計画中 1m
DST/Germany
計画中 0.82m
EROS-B/Israel
計画中 2.5m
TOPSAT/UK
計画中 5m
Diamant-1/Germany
2008.8打上げ 6.5m
Rapid Eye/Germany
2000.12打上げ 1.8m
EROS-A1/Israel
ステータス GSD(m)
ミッション
「第 18 回小型衛星会議 講演集」による
8
(2)小型衛星のトレンド
従来、大型衛星が独占していた高分解地球観測衛星についても、図 1.1.2-2、及び表 1.1.2-2 に示すように小型衛星で実現している例が多く見られるようになってきている。
一例として、Orbital Science 社が開発している商用地球観測衛星である OrbView シリー ズにおいては衛星質量約 300kg で、地上分解能 1mの性能を実現している。
9 Ikonos
OrbView 4 Quickbird
・SPACE IMAGING
・解像度パンクロ1m、マルチ4m
・観測頻度:緯度40度、分解能1mで2.9日に1回
・画像収集量:25画像/軌道、500画像/日
・重量:726kg
・大きさ:直径1.5M
・電力:1.1KW
・寿命:5年(バスは7年)
・軌道: 680KM,太陽同期
・主契約社:ロッキードマーティン
・全投資額:750M$
・打ち上げ:1999年9月/ATHENA2ロケット
・ORBIMAGE
・分解能:パンクロ1m、マルテ4m/200チャンネル
・衛星重量: 304kg
・軌道: 470km、傾斜角: 97.25度
・主契約社:OSC
・Orbview3の費用:~100M$
・#3打ち上げ:2003年6月/ペガサスロケット
・DigitalGlobe
・分解能:60cm
・衛星重量:980kg
・軌道:450km、太陽同期
・主契約社:Ball Aerospace
・#2打ち上げ:2001.10/デルタ7320
WorldView
・DigitalGlobe
・分解能:パンクロ50cm、マルチ2m(標準の4バンド+追加4バンド)
・軌道:高度496km、太陽同期
・DigitalGlobe & Ball Aerospace
・打上げ WorldView-1 :2007年9月/デルタロケット
EROS-A1
画像はhttp://space.skyrocket.de/ よる
図 1.1.2-2 小型衛星利用の高分解能地球観測衛星への適用例(可視光学の場合)
10
表 1.1.2-2 小型衛星利用の高分解能地球観測衛星への適用例(1/3)(可視光学の場合)
衛星名 IKONOS-2 QuickBird-2 OrbView-3 EROS-A1 Pleiades(2機)シリーズ 企業名 Space Imaging社 Digital Globe社 Orb Image社 ImageSat
International社 SPOT IMAGE社 設立企業(メーカ) LMAS社 Ball Aerospace社 OSC社 IAI社等 CNES(Astrium/Alcatel) 日本参加企業 日本スペースイメージング(株) 日立ソフトウェアエンジニアリング(株) (株)NTTデータ RESTEC Civil/Military
dual-use 打ち上げ 1999.9 2001.10 2003.6 2000.12 2008 & 2009 衛星重量 720 kg 950 kg(NASA小型衛星技術計画
(SSTI)の成果活用 304 kg 240 kg < 1000 kg 軌 道 太陽同期極軌道(98度) 太陽同期極軌道(98度) 太陽同期極軌道(97度) 太陽同期極軌道(97度) 太陽同期極軌道
衛星高度 680 km 450 km 470 km 480 km 694 km
パンクロ 450~900 nm 450~900 nm 450~900 nm 005~900 nm 480~830 nm 青;450-520 nm 青;450-520 nm 青;450-520 nm 青;430-550 nm 緑;520-600 nm 緑;520-600 nm 緑;520-600 nm 緑;490-610 nm 赤;630-690 nm 赤;630-690 nm 赤;630-690 nm 赤;600-720 nm 波長域 マルチ
近赤外;760-900 nm 近赤外;760-890 nm 近赤外;760-900 nm
(EROS-A1は8衛星コンステ レーションの第1号衛星)
近赤外;750-950 nm
パンクロ 1 m(±26度) 0.61m 1 m 1.8 m 0.7 m
分解
能 マルチ 4 m (±26度) 2.44m 4 m 2.8 m
セ ン サ 性 能
観測幅 11 km 16.5 km × 16.5 km 8 km 12.5 km 20 km 観測周期
1.5~2.9日(1.5m~1m分解 能) →ポインテイング(衛星本
体、CT,AT±45 度)
1~3.5日
→ ポインテイング(衛星本体、
CT,AT±30 度)
3日以下 → ポインテイ ング(CT,AT±45 度)
2~4日 ポインテイング(±45 度)
2日
±30 度 伝送レート 320Mbps(データ圧縮:11→
2.65bits/ピクセル) データ圧縮:11→2.65bits/ピクセル 150Mbps(JPEG圧縮:
3bits/ピクセル 70Mbps: 11bits/ピクセル 450 Mbps 次期計画 等 0.5m解像度衛星を04年後打上 NIMAはNextViewを$500m(5年)で
契約(03年9月)
Eros-Bシ リ ー ス ゙(350kg以 下 、
0.82m)を05年までに順次打上 コスト:314 Millionユーロ 事業内容等 防災、環境、精密地図作成(GISとの組み合わせ)、土地利用、都市計画、建設計画、公共事業、安全保障、農林業、資源開発、メディア情報、アミ
ューズメント、等に用いる高分解能画像の提供。分解能1m級、観測周期2日程度、データ入手頻度10~20回/月の画像提供サービス
11
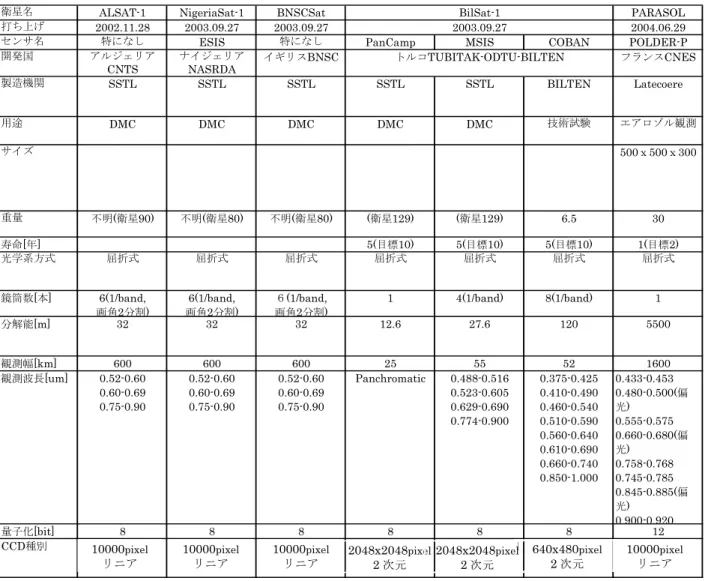
表 1.1.2-2 小型衛星利用の高分解能地球観測衛星への適用例(2/3)
衛星名 ALSAT-1 NigeriaSat-1 BNSCSat PARASOL
打ち上げ 2002.11.28 2003.09.27 2003.09.27 2004.06.29
センサ名 特になし ESIS 特になし PanCamp MSIS COBAN POLDER-P
開発国 アルジェリア CNTS
ナイジェリア
NASRDA イギリスBNSC フランスCNES
製造機関 SSTL SSTL SSTL SSTL SSTL BILTEN Latecoere
用途 DMC DMC DMC DMC DMC 技術試験 エアロゾル観測
サイズ 500x500x300
重量 不明(衛星90) 不明(衛星80) 不明(衛星80) (衛星129) (衛星129) 6.5 30
寿命[年] 5(目標10) 5(目標10) 5(目標10) 1(目標2)
光学系方式 屈折式 屈折式 屈折式 屈折式 屈折式 屈折式 屈折式
鏡筒数[本] 6(1/band, 画角2分割)
6(1/band, 画角2分割)
6(1/band, 画角2分割)
1 4(1/band) 8(1/band) 1
分解能[m] 32 32 32 12.6 27.6 120 5500
観測幅[km] 600 600 600 25 55 52 1600
観測波長[um] 0.52-0.60 0.60-0.69 0.75-0.90
0.52-0.60 0.60-0.69 0.75-0.90
0.52-0.60 0.60-0.69 0.75-0.90
Panchromatic 0.488-0.516 0.523-0.605 0.629-0.690 0.774-0.900
0.375-0.425 0.410-0.490 0.460-0.540 0.510-0.590 0.560-0.640 0.610-0.690 0.660-0.740 0.850-1.000
0.433-0.453 0.480-0.500(偏 光)
0.555-0.575 0.660-0.680(偏 光)
0.758-0.768 0.745-0.785 0.845-0.885(偏 光)
0.900-0.920
量子化[bit] 8 8 8 8 8 8 12
CCD種別 10000pixelリニ ア
10000pixelリニ ア
10000pixelリニ ア
2048x2048pixel 2次元
2048x2048pixel 2次元
640x480pixel 2次元
10000pixelリニ ア BilSat-1
2003.09.27
トルコTUBITAK-ODTU-BILTEN
10000pixel リニア
10000pixel リニア
10000pixel リニア
10000pixel リニア 2048x2048pixel
2次元
640x480pixel 2次元 2048x2048pixel
2次元
12
表 1.1.2-2 小型衛星利用の高分解能地球観測衛星への適用例(3/3)
衛星名 TopSat RapidEye AlSat-2 TARANIS
打ち上げ 2005.10.27 2001.10.22 2007.07予定 2009予定 2009予定
センサ名 RALCAM 不明 不明 CHRIS HRC MCP
開発国 イギリスBNSC ESA ドイツ
RapidEyeAG
アルジェリア
CNTS フランスCNES
製造機関 RAL・SSTL・
QunetiQ
SIRA Electro- Optics Ltd.
SSTL SIRA Electro- Optics Ltd.
BNSC
OIP Sensor Systems
JENA- OPTRONIK
EADS Astrium UDPS
CEA+東北大+
理研
用途 軍事 地球観測(オリン
ピック)
DMC 地球観測 地球観測 地球観測 地球観測 地球観測
サイズ 677x600x300 790x260x200 656x361x
824(Imager), 280x242x 260(Electronic
重量 32(衛星120) 24(衛星166) 不明(衛星166) 14 15程度 Box)43 不明(衛星130) 不明(衛星120)
寿命[年] >1 5
光学系方式 軸はずし3枚鏡光 学系
反射式(推定) 屈折式 マクストフ・カ セグレン+分光
計
カセグレン
鏡筒数[本] 1 1 6(1/band, 画角2分割)
1 1 1
分解能[m] 2.8(パンクロ)、
5.6(マルチ)
4 32 18or36@600km 5 6.5 2.5(パンクロ)
10(マルチ) 観測幅[km] 17 不明 600 14@600km 5(0.504°) 77 17.5km 観測波長[um] 0.4-0.8(パンクロ)
RGB3バンド(マ ルチ)
パンクロ(詳細不 明)
0.52-0.60 0.60-0.69 0.75-0.90
0.400-1.050可変 18バンド
@GSD18m 63バンド
@GSD36m
0.450-0.900 (パンクロ)
0.44-0.51 0.52-0.59 0.63-0.69 0.69-0.73 0.76-0.85
パンクロ マルチ4バンド
量子化[bit] 8 8 8 12 10 12
CCD種別 7um10000pixel TDI型リニア
CCD
10000pixelリニ ア
25um1152x780p ixel2次元
1024x1024pixel 2次元 PROBA-1 Beijing-1
2005.10.27 中国BLMIT
10000pixel
リニア 1024x1024pixel
2次元 10000pixel
TDI型リニア 1152x780pixel 2次元
13 1.1.3 海外における小型衛星の利用
小型衛星の具体的な利用としては以下のトレンドがある。
(1)米国の場合
・即応型宇宙システム(レスポンシブ・スペース)1)
観測要求などの求めに応じた衛星を即時に対応するコンセプト。小型衛星による対応 が中心となる本コンセプトは、米国では民間企業が中心となり「Creating Affordable &
Responsive Space Missions」をテーマに Responsive Space の学会を立上げ活発な議論が 取り交わされている。その実証としてTactical Satellite Programが進んでいる。また、
IntelliTech Microsystemsによる10kgのスパイ衛星(Kestrel Eye)の開発も進んでいる。
・短期・使い捨て
小型衛星はその質量制約、形状制約など特性から、中型/大型衛星と比べて寿命が短く なる傾向がある。衛星を安く作り、次々に打ち上げることで短寿命のデメリットをカバー している。一方で安く打上げる手段の提供も広がっており、このような利用方法が可能と なっている。
・大型衛星は独自の世界を構築(専用高額品)
小型衛星搭載ミッションの観測性能が上がることで、大型衛星に期待される役割が変 わってきている。前述のとおり小型衛星は発生電力、放熱面積の制約を受けやすく、高電 力、高発熱機器の搭載、大型搭載物の採用が困難、搭載燃料に限度が有るなどの制約があ り、これらの制約を受けにくい大型衛星において、KH(キーホール)衛星、Lacrosse など、
より専用性の高い衛星として依然として存在意義を示している。
米国を代表する小型衛星としては、Lockheed Martin 社製の Iridium に採用された LM700バス(300kg)やIKONOSに採用されたLM900(500kg)が挙げられ、最も多く 打ち上げられた小型衛星バスである。
(2)欧州の場合
・小型/中型でミッション実証
フランスでは CNES 主導のもとに開発された Myriade 衛星バスに代表される欧州の小型 衛星の主眼は開発機器の軌道上実証のプラットホームであり、これらで実証した開発機器 を大型衛星で実用化する流れを作っている。
・輸出用小型衛星
Myriade 衛星バスを CNES の元で Thales Alenia とともに開発してきた Astrium 社はこ
14
のバス開発の成果を生かし、AstroSat100 として小型商用衛星として、海外への展開が行 われ発展途上国向けに販売を行っている。特にフランスでは ODA等を通じた海外展開へ の支援が積極的に行われている。表 1.1.3-1 に海外企業による小型衛星バスの輸出状況を 示す。イギリスSSTL社においても 70kg 級、150kg 級、300kg 級の衛星バスをラインアッ プとして設け、中国、ナイジェリア向けなどに 30 機以上供給している。SSTL150 は RapidEye(150kg)のバスに採用されている。RapidEyeは5台によるコンステレーショ ンで同一地域を毎日観測できるシステムを実証し、小型衛星による地上の常時観測に道を 開いた(小型衛星による災害監視、情報収集等)。さらに欧州版GPSであるGalileoにお いても SSTL による小型衛星のコンステレーションが受注されている。SSTL150 等に採 用されている部品等は民生品をベースにSSTLで評価されたものが採用され、SSTやRWA 等様々なコンポーネントがSSTL用に開発されている。
(3)その他
韓国のSaTReCi社によるSI-200(< 200kg)バスによる海外展開が進んでいる。ま た、イスラエルのIAI社ではIMPS II busを使用した光学衛星OPTSAT 3000(400kg)
や、合成開口レーダ衛星であるTechSAR(300kg)の輸出も検討されている。また、中国 等の新興国の参入が予想される。
15
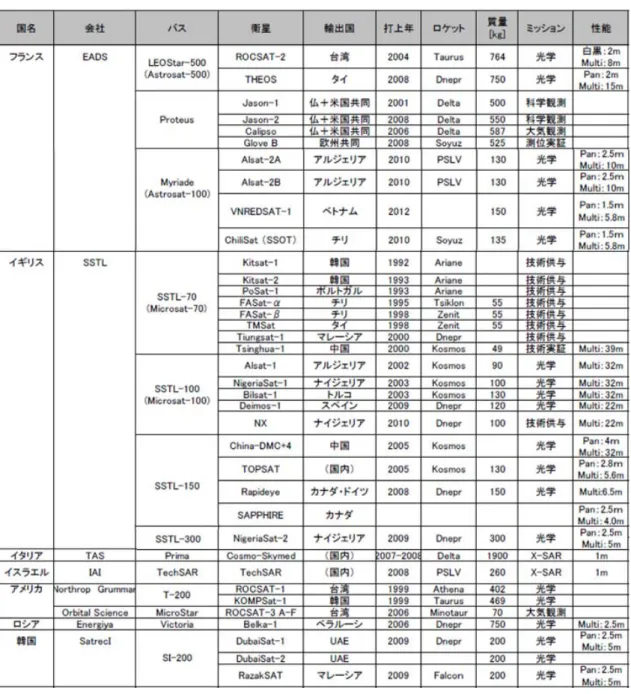
表 1.1.3-1 に海外企業による小型衛星バスの輸出状況を示す。
16
(4)米国レスポンシブスペース(即応型衛星)
ここでは、小型衛星の利用が不可欠な、米国における即応型宇宙システム(レスポンシ ブスペース)について概要を述べる。衛星の活動頻度とその活用期間の関係の中でレスポン シブスペースの利用目的を整理すると下図に示される。
「RS5報告資料」による
図 1.1.3-1 米国における即応型衛星の位置付け
即応型衛星は UAV(無人航空機)と従来型衛星の役割のちょうど中間に位置づけられ、
要求に応じて即時に打上げができること、これに対応した短い開発期間であること、また ニーズにあった観測ができるよう最新の技術をすばやく適応していくことが求められてい る。
表 1.1.3-2 にレスポンシブスペース衛星に要求されている要件を整理した。
17
表 1.1.3-2 レスポンシブスペースの要件
・識別された必要性に基づき、打ち上げ後24時間以内に必要な 情報を提供
・量産機は約1年で製造、プラグ&プレイの適用、製造/試験 容易性、最新技術反映
・短期間での打ち上げが可能。寿命半年~2年
・VMOC (Virtual Mission Operations Center)によるインターネット での衛星アクセス。専門家で無くとも使用可能な運用端末。
・低価格な小型ロケットで打上。
FALCON (Space-X) 、Minotaur (Orbital)
・量産時には1機数十億規模 レスポンシブ
短期開発
打ち上げ 運用容易性
打上ロケット
低コスト
・識別された必要性に基づき、打ち上げ後24時間以内に必要な 情報を提供
・量産機は約1年で製造、プラグ&プレイの適用、製造/試験 容易性、最新技術反映
・短期間での打ち上げが可能。寿命半年~2年
・VMOC (Virtual Mission Operations Center)によるインターネット での衛星アクセス。専門家で無くとも使用可能な運用端末。
・低価格な小型ロケットで打上。
FALCON (Space-X) 、Minotaur (Orbital)
・量産時には1機数十億規模 レスポンシブ
短期開発
打ち上げ 運用容易性
打上ロケット
低コスト
特徴としては、目的地域の即時観測が可能なこと、短期間での開発、低価格なロケッ ト、及び衛星本体、専用の運用設備を必要としないなどである。これらの実現を可能とし ている技術を次に述べる。
(ア)即応可能な打上げ
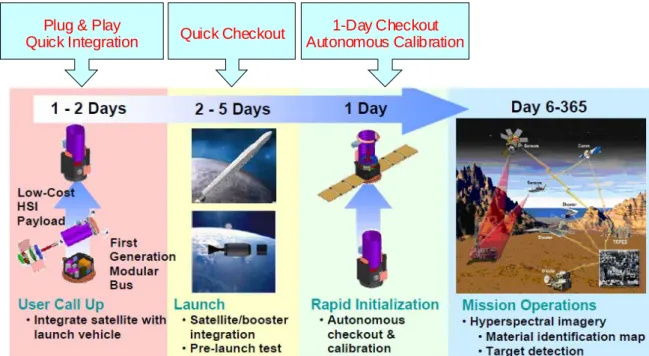
即応可能な衛星打ち上げを実現可能にしようとしているコンセプトとして提唱され ているのが6 Days Spacecraftである。このコンセプトの特徴は以下のとおりである。
・衛星による観測要求発生後のCall Upから軌道上運用迄6日間で実施することを目標
・衛星はモジュール化され、倉庫品として保管(光学観測モジュール、SARモジュール、
通信モジュールなど)
・必要なモジュールを要求に応じ組み合わせS/Wをインストール
・専用ロケットで打ち上げ、軌道上にて自動チェックアウト後、運用を開始
予め開発し準備した衛星の各サブシステムを機能ごとにモジュール化し、観測要求が 出次第、要求に応じた機能モジュール及びS/Wをインストールし、衛星を組み立てる。組 み立てた衛星を標準化された試験により機能確認を実施、打ち上げるというものである。
(図 1.1.3-2 参照)
18
図 1.1.3-2(1) 6 Days Spacecraft 概念(1/3)
「19th Small Satellite Conference報告資料」による
図 1.1.3-2(2) 6 Days Spacecraft 概念(2/3)
19 Plug & Play
Quick Integration Quick Checkout 1-Day Checkout Autonomous Calibration
「19th Small Satellite Conference報告資料」による
図 1.1.3-2(3) 6 Days Spacecraft 概念(3/3)
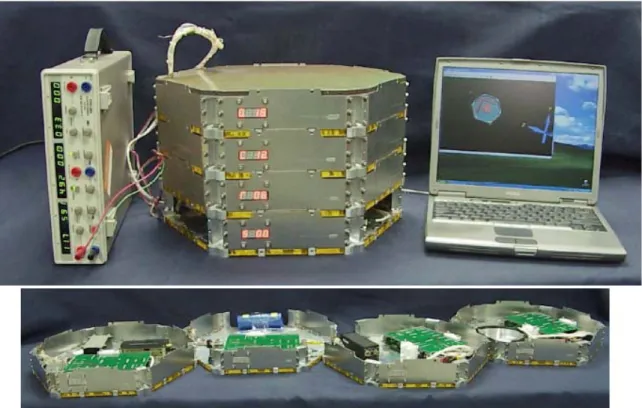
(イ)SMARTBus
衛 星 の モ ジ ュ ー ル 化 の 概 念 を 具 体 的 に 実 現 し よ う と し て 提 案 さ れ て い る の が SMARTBusである。SMARTBusは各サブシステムごとに機能を分けたモジュールを組み 合わせることで衛星を構成する設計であり、特徴は以下のとおりである。
・モジュールの機械的標準、電気的標準、論理的標準より構成される
・これらの標準で衛星のモジュール間インタフェース、衛星全体の構成を規定
・各モジュールの物理特性、質量特性等は共通
・各モジュールは独立開発し、保管
図 1.1.3-3 にそのコンセプト、図 1.1.3-4 に開発モデルを示す。
20
「19th Small Satellite Conference報告資料」による
図 1.1.3-3 SMARTBus コンセプト図
「19th Small Satellite Conference報告資料」による
図 1.1.3-4 SMARTBus 開発品
21
(ウ)Plug-and-Play
SMARTBus においては衛星のモジュール化をすることで衛星開発時間の短縮、低
コスト化の実現しようとしているのに対して、より汎用的な技術として提唱されているの が宇宙用機器におけるPlug-and-Playインタフェースの提唱である。特徴としては以下の とおりである。
・AFRLの6 Day Satelliteを目標に提唱
・6Day Satelliteを実現するためにボード計算機的な開発思想を導入。
-ボードの組み合わせによるシステムの構築
-アプリケーションのインストールによるカスタム化
・上記により“ミッションに適応した良好なカスタマイズ性”を確保。また、カスタマ イズに関わる“設計プロセスの自動化”により工程を短縮
・具体的な汎用インタフェースとしてUSB及び、SPACEWIREを活用
これらを実現することによりインタフェース設計の短縮、試験手順の汎用化を図りつつ、
必要なカスタマイズ
(エ)即応型宇宙システムの具体例
図 1.1.3-5 にレスポンシブスペースのコンセプトに基づき開発、運用された衛星を 示す。
Tacsat-2
高空間分解能を持つ(光学1m以下)
小型衛星システム 370kg
(出典)国防総省・Microsat Systems
Tacsat-3
ハイパースペクトルセンサ(0.4~2.5µm) 小型衛星システム
400kg
(出典)国防総省・ATK
図 1.1.3-5 レスポンシブスペース衛星の開発例
22 1.1.4 日本における小型衛星
前述の世界的な動向に合わせ、日本においても小型衛星は『宇宙基本計画』の中で産 官学連携の柱として位置づけられおり、経済産業省(METI)、(独)宇宙航空研究開発機 構(JAXA)、(独)情報通信研究機構(NICT)等にて小型衛星バスの開発が推進されてい る。以下に代表的な例を示す。
(1)METI
① SERVIS(宇宙環境信頼性実証システム) -1,2
小型低価格衛星に使用する民生品技術を使用したコンポーネント等を開発し、その実 証を目的としている。SERVIS-1(850kg)は2003 年に打上られ、2005年に運用を終了 している。また、SERVIS-2(740kg)は2011年6月の打上を予定している。
② ASNARO
高解像度地球観測をミッションとする350kg級の小型衛星。バスはJAXAの小型科学 衛星と共通としてコストダウンを図る(小型標準バスを使用)。Spacewire等の採用により 汎用性、自在性を確保している。
(2)JAXA
科学衛星、技術実証、地球観測等の分野で小型衛星を開発している。小型科学衛星バ スはASNAROとバスを共通とし、ASNARO開発に当たってはJAXAの保有する小型衛 星の基板技術を提供することでMETIと連携している。また、国の技術政策、産業政策の 一環として、まいど1 号等の支援を行っている 2-4)。さらに、APRSAF(アジア太平洋地 域宇宙機関会議)参加国と協力して、EO-STAR(質量300~500kg、小型科学衛星バスを 使用)、Micro-STAR等の開発を計画している(STAR Program)。
① 科学衛星 INDEX(60kg)
オーロラ微細構造の観測という科学ミッションと小型衛星のバス機器の実証(FOG
(光ファイバジャイロ)、GPS、薄膜反射器を用いた太陽集光パドル等)を目的とした衛 星。2005年打上。質量は60kg。
23
図 1.1.4-1 INDEX(れいめい)
② 技術実証衛星 MDS-1(480kg)
民生部品・コンポーネント実証衛星「つばさ」は、開発のリスクや先端的な新規開 発要素が大きい機器・装置等を開発する前に、実際の人工衛星を利用して、基礎データの 取得や機器の機能の検証を目的として開発された。2002年打上。
図 1.1.4-2 MDS-1(つばさ)
③ 技術実証衛星 µ-Labsat(50kg)
宇宙機をより小型高機能化することを目的の衛星とする技術実証衛星。ロケットと の分離機構、遠隔検査技術実験により、小型衛星への技術蓄積を図った。2002年打上。
24
図 1.1.4-3 µ-Labsat
④ 技術実証衛星 SDS-1(100kg)
JAXA が開発した高速 MPU を用いた次世代ネットワーク型データ処理技術
(Spacewire)の実証や小型軽量のマルチモード統合トランスポンダの実証等を目的とす る。シリーズ化を予定しており、SDS-2では次世代スタートラッカや非冷却赤外線センサ の実証を予定している。
図 1.1.4-4 SDS-1
⑤ 技術実証衛星 SLATS(質量300kg程度)
従来実現できなかった超低高度(250km~180km)を継続的に飛行する超低高度衛 星の技術実現性およびシステムコンセプトを早期に実証を目的とする。2013年打上予定。
小型標準バス化を目指している。
25
図 1.1.4-5 SLATS
⑥ 産学官連携 SOHLA-1(50kg)
より汎用性の高い小型衛星を開発して産業化を図り、地域の活性化を行うことを目 的とする。大阪大学が雷観測の基礎実験機器を開発し、大阪府立大と龍谷大がJAXAの技 術支援のもとシステム設計に参加。
(3)NICT
通信衛星への先進的通信技術の採用を見込み、軌道上での要素技術実証を行う目的と する小型衛星 SmartSat-1(質量 270kg)を開発している 5)。小型標準バス化を目指して いる。
図 1.1.4-6 SmartSat
26 1.1.4.1 NECの小型衛星
ここでは代表例として、現在NEC で開発中の国産小型衛星であるASNAROについ て詳しく記述する。ASNARO(Advanced Satellite with New system Architecture for Observation)は、(独)新エネルギー・産業技術総合開発機構(NEDO)及び(財)無人 宇宙実験システム研究開発機構(USEF)が推進している「小型化等による先進的宇宙シ ステムの研究開発」により開発が進められている打上質量450kgの低軌道周回小型地球観 測衛星である。また、JAXAの小型科学衛星バスとしても様々な用途への採用が期待され ている小型標準バスを採用している。
Xバンドアンテナ
スタートラッカ
太陽電池パネル ミッション
バス 光学センサ
軌 道 制 御 用 スラスタ
ミッション機器
図 1.1.4.1-1 ASNARO 衛星外観図
(1)性能緒元
高度504kmから撮像した光学画像の GSD(地上分解能)は、0.5m以下(パンク ロマティック)及び2.0m 以下(マルチスペクトル)であり、このクラスでは世界最高レ ベルのGSDを目指している。ASNAROの主要緒元を表 1.1.4.1-1 に示す。
27
表 1.1.4.1-1 ASNARO 性能緒元
~1300W(EOL) (ミッション機器:400W)
消費電力
2.5m ×3.5m ×3.2m(軌道上)
寸法 設計寿命 3年
合計450kg(バス:250kg(推進薬除く), ミッション部:150kg 推進薬:50kg) 衛星質量
45deg/45sec (平均 1deg/1sec) アジリティ
太陽同期軌道(高度504km,軌道傾斜角97.4deg,降交点時刻11:00AM) 軌道
±45deg/ ±45deg (CT/AT方向) ポインティング範囲
パンクロ/マルチ
GSD<0.5m/2m(パンクロ/マルチ) 高度504kmより 刈幅:10km
X Band 16QAM ~ 800Mbps ミッション部
-光学センサ
-伝送系
~1300W(EOL) (ミッション機器:400W)
消費電力
2.5m ×3.5m ×3.2m(軌道上)
寸法 設計寿命 3年
合計450kg(バス:250kg(推進薬除く), ミッション部:150kg 推進薬:50kg) 衛星質量
45deg/45sec (平均 1deg/1sec) アジリティ
太陽同期軌道(高度504km,軌道傾斜角97.4deg,降交点時刻11:00AM) 軌道
±45deg/ ±45deg (CT/AT方向) ポインティング範囲
パンクロ/マルチ
GSD<0.5m/2m(パンクロ/マルチ) 高度504kmより 刈幅:10km
X Band 16QAM ~ 800Mbps ミッション部
-光学センサ
-伝送系
(2)観測モード
また、ASNAROは以下の4種類の観測モードを有している。
①スナップショットモード
10km×10kmの画像取得するモード。衛星姿勢は慣性空間で固定される。
②ワイドビューモード
スナップショットを繋ぎ合せることにより広い観測幅を実現するモード。
③立体視モード
異なる2点から同一地点視を行うことにより立体画像を取得。
④ストライプマッピングモード
10km幅でAT方向に最大850kmの画像を取得するモード。最大観測継続時間は 120sec。
28
①スナップショットモード ②ワイドビューモード
③立体視モード ④ストライプマッピングモード 図 1.1.4.1-2 観測モード
(3)姿勢精度・安定度
高分解能画像を取得するにあたり、必要とするポインティング姿勢精度要求値は 0.05deg(3σ)以下であり、姿勢安定度は 0.01deg/sec以下としている。これらを実現す るために、運用の工夫(静定時間を考慮した事前のポインティング開始)や波形整形制御 を利用している。これによりマヌーバ直後においても高い姿勢安定度を示す(図1.1.4.1-3)。
図 1.1.4.1-3 姿勢安定度
-4.0E-06 -2.0E-06 0.0E+00 2.0E-06 4.0E-06
60 70 80 90 100
δ(εx)/4.2ms δ(εy)/4.2ms δ(εz)/4.2ms
Time [s]
Displacement [degree/4.2ms]
←Evaluation beginning time
-4.0E-06 -2.0E-06 0.0E+00 2.0E-06 4.0E-06
60 70 80 90 100
δ(εx)/4.2ms δ(εy)/4.2ms δ(εz)/4.2ms
Time [s]
Displacement [degree/4.2ms]
←Evaluation beginning time
29
(4)アジリティ
効率的な観測を行う上では、アジリティ性能が重要である。ASNARO では高いア ジリティ性能を実現するために慣性モーメントを低減しており、平均的なアジリティ性能 としては1deg/sec(45deg/45sec)を実現している。(図 1.1.4.1-4)
図 1.1.4.1-4 直下視を起点としてオフナディア角 45°のポインティングマニューバする 際に必要な時間(解析例)
(5)小型標準バス
衛星バスにはNEC製小型標準商用バス(NEXTAR)が適用されている。衛星のバス 部とミッション部が構造・熱・電気的に独立となるように設計されており、ミッションと バス間のインタフェース条件を規定することによりバス側は設計変更せずに複数のミッシ ョンに容易に対応可能な標準バスとなっている。この標準バスはJAXA次期固体ロケット、
H2A、DNEPR など各国の主要なロケットで打ち上げ可能である。図 1.1.4-11 に標準バ スと次期固体ロケットフェアリング収納状態の外観図を示す。
0 10 20 30 40 50 60 70 0
10 20 30 40
50 60
70 80
90 100 110 120 130 140 160150 180 170
200190 210 220 230 240 250 260 270 280 290
300 310
320330340 350
※ロー ロール に対す ング時
Time [s]
Direction [degree]
0 10 20 30 40 50 60 70 0
10 20 30 40
50 60
70 80
90 100 110 120 130 140 160150 180 170
200190 210 220 230 240 250 260 270 280 290
300 310
320330340 350
※ロー ロール に対す ング時
0 10 20 30 40 50 60 70 0
10 20 30 40
50 60
70 80
90 100 110 120 130 140 160150 180 170
200190 210 220 230 240 250 260 270 280 290
300 310
320330340 350
※ロー ロール に対す ング時
Time [s]
Direction [degree]
30
1m 1m
1m
1m 1m
1m
1m 1m
1m
図 1.1.4.1-5 NEC 小型標準バス(NEXTER)
31 1.1.4.2 三菱電機の小型衛星
ここでは、三菱電機で検討を行っている小型衛星のプラットホームについて紹介する。
本プラットホームは光学センサ、電波センサなど各種ミッションに対応可能な柔軟性のあ るバスを目指し検討を重ねてきたものであり、小型軽量でありながら、バス機能の冗長性 を有し、信頼性を確保している。図 1.1.4.2-1 に外観、図 1.1.4.2-2 に構成ブロック図、
表1.1.4-1に主要インターフェースを示す。
図 1.1.4.2-1 三菱電機 小型衛星外観図(光学センサ搭載例)
32
Drive Signal To
Mission/Comp/
HTR
TNK
FLT PFD
GFD
PT
THR1
LV
4×1N Thruster THR2 THR3 THR4
STRX-A SANT-A
SANT-B SDIP1
TX-A RX-A
STRX-B TX-B
RX-B SDIP2
Propulsion (RCS)
STR Structure
(STR )
: Internally Redundant
Integrated Spacecraft Controler
(ISC)
Power (EPS)
Thermal Control (TCS)
HTR Communication
(COM)
MTQ
Telemetry Command
RWA CESS
MAG
From/To Comp
SAP1
SAP2 Misson Payload
SCU
(Spacecraft Control Unit)
LIB GYRO
PCU (Power Control
Unit)
PDU (Power Distribution
Unit)
Telemetry Command Mission Data
CMD/TLM
Mission Payload
Drive Signal To
Mission/Comp/
HTR
TNK
FLT PFD
GFD
PT
THR1 THR1
LV
4×1N Thruster THR2
THR2 THR3THR3 THR4THR4
STRX-A SANT-A
SANT-B SDIP1
TX-A RX-A
STRX-B TX-B
RX-B SDIP2
Propulsion (RCS)
STR Structure
(STR )
: Internally Redundant
Integrated Spacecraft Controler
(ISC)
Power (EPS)
Thermal Control (TCS)
HTR Communication
(COM)
MTQ MTQ
Telemetry Command
RWA RWA CESS CESS MAG MAG
From/To Comp
SAP1
SAP2 Misson Payload
SCU
(Spacecraft Control Unit)
LIB GYRO GYRO
PCU (Power Control
Unit)
PDU (Power Distribution
Unit)
Telemetry Command Mission Data
CMD/TLM
Mission Payload
図 1.1.4.2-2 三菱電機 小型衛星 構成ブロック図
33
表 1.1.4.2-1 三菱電機 小型衛星 主要バス諸元
特徴 サブシステム
S/Wによるヒータ制御 TCS
アルミハニカムサンドウィッチ構造 STR
ヒドラジン 一液式推薬タンク及びスラスタ RCS
S-band
SFCG及びCCSDS Recommendations準拠 COM
SCP による統合化制御
3 軸ゼロモーメンタム姿勢制御 SCP
非安定化バス 22.0 to 32.0V リチウムイオンバッテリ
EPS
特徴 サブシステム
S/Wによるヒータ制御 TCS
アルミハニカムサンドウィッチ構造 STR
ヒドラジン 一液式推薬タンク及びスラスタ RCS
S-band
SFCG及びCCSDS Recommendations準拠 COM
SCP による統合化制御
3 軸ゼロモーメンタム姿勢制御 SCP
非安定化バス 22.0 to 32.0V リチウムイオンバッテリ
EPS
表 1.1.4.2-2 三菱電機 小型衛星 主要ペイロードインターフェース諸元
500×1000×1000 mm(Typ.) 打上げロケットに依存する ペイロード包絡域
一次電源電圧: 22 V to 32 V
Maximum allocated power: 60 W (mean), 90 W (max) (depends on orbit and attitude)
電源インターフェース
RS-422, Space Wire ミッションデータ伝送
3点支持構造 機械インターフェース
重心位置の包絡域 TBD
独立熱制御 熱インターフェース
RS-422, 1553B テレメトリ/コマンド伝送
内容 項目
500×1000×1000 mm(Typ.) 打上げロケットに依存する ペイロード包絡域
一次電源電圧: 22 V to 32 V
Maximum allocated power: 60 W (mean), 90 W (max) (depends on orbit and attitude)
電源インターフェース
RS-422, Space Wire ミッションデータ伝送
3点支持構造 機械インターフェース
重心位置の包絡域 TBD
独立熱制御 熱インターフェース
RS-422, 1553B テレメトリ/コマンド伝送
内容 項目
34 1.2 赤外センサの技術動向調査
従来の衛星においては、明確なミッション要求とそれを実現させるコスト面のフォロ ーが大きい傾向があった。そのため比較的コストが高いが、高感度・高応答速度である冷 却型赤外センサが採用されてきた。しかし、近年の低コスト化と短い開発期間要求を鑑み た場合、従来の手法を踏襲することは困難になりつつある。その解決策の一つとしてCOTS
(commercial-off-the-shelf)製品の利用が挙げられ、一般民生用途に採用が広がりつつあ る非冷却型赤外センサの衛星搭載検討が進んでいる6)。
ここでは、冷却型赤外センサ素子と非冷却型赤外センサ素子及び宇宙用冷凍機の技術 動向について述べる。
1.2.1 赤外線センサ素子
赤外線センサ素子は半導体内での電荷とフォトンの相互作用を利用して光を検出する 量子型素子と、赤外線の吸収による素子自身の温度変化で検出する熱型赤外線素子に大別 される。図 1.2.1-1 に赤外線検出器の分類を示す。
赤外線 検出器
量子型 検出器
熱型 検出器
InSb
MCT
QWIP
(QDIP)
非冷却 素子 真性 半導体
量子 井戸型
(III-V)
(II-VI) IR EG CB
VB
EB IR
C B
赤外線 検出器
量子型 検出器
熱型 検出器
InSb
MCT
QWIP
(QDIP)
非冷却 素子 真性 半導体
量子 井戸型
(III-V)
(II-VI) IR EG CB
VB
IR EG
CB
VB
EB IR
C BEB IR
C B
図 1.2.1-1 赤外線センサ素子の分類
表 1.2.1-1 に図 1.2.1-1 記載の赤外センサ素子の比較を行いその特徴を示す。表 1.2.1-1 より、量子型は熱型に比べ応答速度が速く、高感度であり検出器としては高性能 な反面、大型冷凍機が必要でシステムが大型化し高コストとなる。一方、熱型検出器は量 子型に比べ低応答速度、低感度であり検出器として性能は低い反面、冷凍機が不要により システムを小型化でき、また民生品として量子型より需要が多く量産効果が期待でき総じ て低コストと言える.