NII-Electronic Library Service
デ ザ イ プ ジ ク ト
生
命
化 さ れ た
手術
シ
ス
テ ム
ー
BMOS
一
Biologically
Insp
}red MedicalOperation
System −BIMOS 一
松本 大 MATSUMOTO Masaru 吉原 和歌子 YOSHIWARA Wakako 氏家 良樹 UJIIE Yoshiki 五十嵐浩 也 IGARASHI
Hiroya
松岡由 幸
MATSUOKA
Yoshiyuki 慶 應 義 塾 大 学 慶應 義塾大学 慶 應 義 塾 大学 筑波 大 学 慶應 義塾 大学1
.緒言
現 在
、
世 界の 多くの 先端的
な研究機
関は その研 究 対 象をバ イ オ・
医療
など 「生命
(Life
)」に関 与 する 人工物 や その シス テ ム に シフ ト しつ つ あ る。
こ の背 景を鑑み、我
々は 「生命
」 に関 与 す る 主 要 な 研 究 分 野で ある医 療に注 目した。 本 作品 に おいて は、
その 中で も特
に近年著
しい進 化 を遂 げて い る手 術シス テ ムの デ ザインを試 行し、
今 後の医療の一
助
とするこ と を目的と した。
本 デザイ ン で はまず
、
現在
ま で の医学
の 歴 史 (図1
) か ら考察
す ること で手 術に おける課 題 を抽 出する。
医 学 的 治 療 は
1
万年前
の儀式
に始
ま り、古代ギ
リ シアの自然哲
学的
アプロー
チ、
ルネッサンス 以降の 自然 科 学 的アブロー
チ を 経て現 在に 至 って い る。
そ の中で1800
年 代初
め に 人類 初の手 術 が行 わ れ た。
こ れは現 在も行
わ れて い る開腹による手 術で あ る。
し か し、
この方 法 は 患 者の負 担、
つ ま り傷
口 が拡大
す ること による肉体 的 負 担、
入院
日数が長 期 化 するこ とに よ る経済的負
担の大きい ことが 問 題 と されてい る。
その た め、
上記の問 題 を解 決 する方向
で、
手術
にお ける技 術は急 速な進歩
の一
途
を た どっ てい る。1920年頃
に は 心臓カテー
テ ルが 発 明され、1950 年
頃に は内視鏡
が開 発さ れ、1980 年代
には、腹腔鏡
下 手 術が誕 生 した1)。
現 在で はそれ らの技 術が実 際 の手術
に お い て積極
的に用いられて いる。
こ の こ と に よ り、
患 者の負 担は軽 減さ れ ている。
し か し同 時 に、
手術
が高度
な技
術を必 要と して いる た め、
術 者 の負 担 が 大 き くなる問 題が新た に発生 し ている。
そ こ で本 デ ザ イン に おいて は患 者のみ な ら
ず
術 者 に対 して も負担
が少
ない手術
シ ステムを提 案 する。
2
.
本 デ ザ インに お ける ア スペ ク ト2
.
t
2
つ の ア スペ クト本 作 品のデ ザイ ン対 象で あ る手 術シ ス テム は
、
近年、
特に装備
面に おい て急 速 な 進 化を遂 げてい る。
そのため、 こ のデ ザイ ン を遂行
さ せ る 上 で、
これ に 関わる工学
の知見
を操作
す る こ とは 必 須で ある。一
方、
術 者と患 者の相互作 用 性に注目した インタ ラ ク ティブなデ
ザイン につ い て は、
依 然多
くの 課題 を残 して い る。 そこで、
本 デ ザイ ン で は、
それ ら両 者に調
ぜ ぜ
ダ 避
’
’
φ
ン3
i
l
l
l
AScientific Approach to rned沁ir博
i1
l
ll
「
l
1
.
1
’1
緇
〆
評
11
鐸
騙
駐
、
酬
晦燈,[
E・gineer
゜
卿lt
図1 医学の 歴史 図2 デ ザ インアスペ ク ト70 SPECIAL
ISSUE
OF
JSSD
Vol
.
12No,
42005 デザイ ン学研 究 特 集 号対 応 するため
、デ
ザイ ン面
と 工学
面の2
つ のア スペ ク トに焦点を合わせ、
進めるこ と と する (図 2)。
2
.
2
デ ザ インア ス ペク ト本 節に おいて は
、
デザイ ン 面のア スペ ク トにつ い て説明する。
2
.
2
.
1
生命
デ ザ イン前 述したよ う に本 作 品の デ ザイ ン 対象である手 術シ ス テ ム は
、
「生命」 に 関与 するデ ザイン (以下、
「生 命 デ ザ イン (
Design
for
Life
)」 と称
する)である
。一
方 「生 命」 にお ける環 境 (以 下 「生体 環 境」 と称す る ) は 日ごろ我々が体 験 することの で き な い非日常 的な力 学 環 境で あ る。
この こと に よ り 「生 命 デ ザイン 」 は、
非日常の環 境にお ける人工物の デ ザイン (こ の以 下、
非日常のデ ザイン (Designfor
theExtraordinary
)と称 する)である といえる。
非 日常の デ ザイ ンは、
デ ザ インに おいて重 要な直 観 や経験
に基づ く知 識が 不足 するため、
従 来の 工業デ
ザ イン (lndustrial
Design
) と 工学 設 計 (Engineering
Design
)の2
つ のデ ザ イン L)と は異な る新た な創
造 性が 必 要である。 こ の新たな創 造 性が 必要なデ ザ インを 「も うひとつ の デ ザイン (Another Type of Design )IP 」 と定 義す る。
次 章で は 「も う ひ とつ のデ ザイ ン」 に 対応 する新 た な デザイン方 法 論を提 案 する。
222 「
も うひ とつのデ ザイ ン」
に対
応 する「
基礎研
究 型協調
デ ザ イン」
本 デザイン で は 「も う ひ とつ の デ ザイ ン」 に対応 するデザイン方 法 論と して
、
基 礎 研 究の段 階か らデ ザ イナ が参画 し、
科 学 者・
工学 者 と協調する 「基 礎 研 究 型 協調 デザイン 」3・
4) を 提案す る
。
「基 礎 研 究 型 協 調 デザイン 」 に おいて は
、デ
ザイ ナ と研究 者の双方がデ ザイン に関する知 識 (ニー
ズ) と基盤
研究
に関する知識
(シー
ズ)を同 時に共 有で きる。
その結 果、非
日常
のデ ザイ ン において障 害 と な る知 識の不足を補えるため、
「も うひ とつ のデ
ザ イン 」 へ の対 応が可 能に な る と考え ら れ る。
ま た、
基礎
研究
型協
調 デザイ ン におい ては 以 下 に 示 す 効 果 が副次 的 に 生ずる と 考 え られ る。
基 礎 研 究を基に し た新しい価 値の導 出 基 礎 研 究の技 術の 有用 性の検
討 基 礎 研究に関わ る新し い研究課題の抽 出2
,
3
工学アス ペ クト 本 節に おいて は、
工 学 面のアス ペ ク トにつ いて 説 明 す る。
2
.
3
,
1
工学
の パ ラダ
イ ム工学における
20
世 紀の大き な パラダイムは2
つ 存 在 する。
一
方は、
産 業 革 命 以 来、
急 速に 発展し た 工 業を支 える形で進 んできた 「高性 能 化」 である。
他 方は、
近年
コ ン ピュー
タの発 達によ り、
メカ トロニ クスを 中心に発 展し た 「知 能 化」 で あ る。
そ して現 在は、DNA
を中 心と した 人 間の 構 造が科 学的に解 明さ れ つ つ あ る。
そ れ を受け て、21
世 紀 にお ける第 3
の 工学
のパ ラダイ ム と.
して、
「生 命 化」 が 注 目 されている。
以 下に 「生命
化」 の定義
に関し て述
べ る。
2
.
3
.
2
生
命化
本 デ ザイ ンで は、
「生 命 化」 をシ ス テ ム 内部の 要素
と シ ス テ ム外 部の要 素 間のインタラク シ ョンをデ
ザイ ン情 報に含む こ と と捉 えた。
そ して、
内 部と外 部 を インタラクシ ョ ンさ せ る方 法と し て、
「生命 模 倣」と「生命・
人工 シ ステム統 合」の利 用を考え た。
「生 命模
倣」 は、
生命 体の形態・
構 造を模 倣 する第1
段 階と、
生命
システ ム を模倣
する第2 段階
によ り構 成 さ れる。 「生 命・
人工 シ ス テム統 合」は、デ
ザ イン 対 象で あるシ ステム内に、
生命体
を制
約条件
とする 第1
段 階と、
生命 体 自体をデ
ザ イン変 数と し、
人工 物と生命 体の 組み合 わせ問 題 とする第2
段 階に よ り 構 成さ れ る。
3
.
生 命 化 され た手 術 システム 「BIMOS
」本
デ
ザイ ンでは、
デ ザイ ン にお ける 「基 礎研究 型協
調デ
ザ イン 」、
お よび工学
におけ る 「生 命 化」 を 考 慮した 手 術シ ステムのデ
ザ インを行っ た。次章
では 生
命
化さ れ た 手術シ ス テ ム 「Bio
[ogically lnspiredMedical
Operation
System −
BIMOS一
亅 の 提 案に関 して言 及 する
。
NII-Electronic Library Service
3
.
1
手
術 システム にお け るr
基 礎 研 究 型 協 調 デ ザ イン」本
作 品で はデ
ザ インと研 究の協 調に基づき、
現 在 開 発 中の技 術 を用いた 手 術シス テ ムのデザイ ン を行 っ た。 そ の際 デ ザイ ン に 関する 知識と研 究 に関 する知識
を同時
に考慮す
るための方 法と してQFD
(
Quality
Function
Deployment
)を用い た階 層 型 デザイン モデ リング手 法を使用した
。
3
,
2
手術
シ ス テ ム に おける「
生 命 化」
本 デ ザ イン において は 「生 命
化
」 を実現 する た め、
「生 命模
倣」 と 「生命 ・
人 工シ ステ ム統 合」を利 用 すること と し た。
まず
、
「生命 模 倣」 の利 用に関して 説 明 する。
本 デザイン で は 「生 命 模 倣」 と し て 手術システ ム 上 に 生 物のシ ス テ ム を表
現 する こ と と し た。
こ こで は 生 物の シ ステ ムを 「相互作 用 性」 と 「階 層 性」が 「イ ン テグレー
ショ ン」 し た もの で あ る と捉え、
手 術シ ステ ム にそれ らの性 質 を 付 与さ せた。 「相互作 用 性」 の付 与に対しては、
人 間シス テ ム や情報
システ ム を 手 術シス テ ムに導 入 する ことで対 処 した。
そ し て、
「階層性」 の付
与に 対 し て は、技
術シ ス テ ム を手 術 シス テム に導 入 することで対 処した。 つ ぎに、
「生 命・
人工 シ ス テ ム統 合」 の利用 につ い て説 明 する。
手 術シ ス テ ム はすで に、
その第 1
段階
に相 当する生 命体
を制約条件
と し てい る。
そ のた め、
第2
段 階である人工物と生 命 体の組み合わせ問 題と して手 術シ ス テ ム を考
え る こ と に した。本デ
ザイン に おいて は、
ロボッ ト と 人間が一
体と なっ て行う協 調 手 術 を人工物 と生命 体の組み合 わせ問題として捉え た。
3
.
3
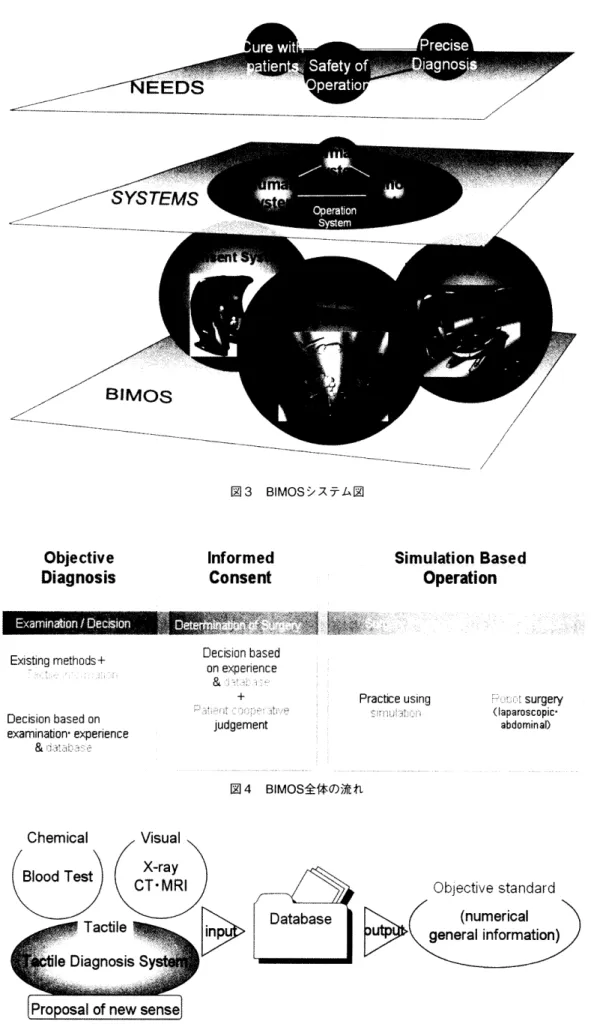
全体の流れ と特 徴 今回提 案 する 「BIMOS
」 の シ ス テ ムを 図3
に 示 す。
まず、
本デ
ザ インで は、
現 在 手 術に求め られて い る ニー
ズをQFD
を用い て抽 出した 結 果、
「患 者 と共に行
う治療
」、
「診
断の正確性
向上1、
「手 術の安全性 向 上」 の3
つ のキー
ワー
ドを導 出した。 そ して 「生 命 模 倣」 として人 間シ ス テム、
情 報シ ステム、
技 術シ ス テ ム を 「イ ン テグレー
ション」 させ るこ と に よ り 「Objective
Diagnosis
System
」、
「lnformed
Consent
72 SPECIAL
ISSUE
OF
JSSD
Vol
.
12No.
42005 デ ザイ ン学研究特 集号System
」お よび 「Simulation
Based OperationSystem
」を提 案した
。
「BIMOS 」 の主 な特 徴は
、
イン フ ォー
ム ドコ ンセ ン ト に よ る患者
と医 師との 「協 調 医 療」、
および、
シ ミュ レー
ショ ン に も と つ く腹 腔 鏡 下手術の2
点で ある。
特に、
シ ミュ レー
ション に お い て は、従来
の 手術の流れでは確立 さ れ てい な かった新しい 段 階と して 「手 術の準 備」 を提 案し た。
今回提 案 する 「BIMOS 」 のプロセス を 図4
に 示す。
精 密 検 査や病 気の決 定 時に は 「Objective
Diagnosis
System
」 を、
手 術 方 法 の 決 定 時 には 「Info
edConsent
System
」 を、
手 術の準 備か ら手 術に か け ては 「Simulation Based
Operation
System
」 を用いて治 療が進 められて い く。
3
.
4
システ ム詳 細3
.
4
.
1
0bjective
Diagnosis
System
(以 下 「
ODS
」 と称す る)現 在の精 密 検 査で は
、
血 液 検 査のよ うな 化学
的な検
査5 ) や、
レン トゲン、cr 、
MRI
のよ う な視 覚 的 な検
査6) が中
心 で あ る。
し か し、一部
の病気
で は こ のよ う な化 学 的検査や 視 覚 的 検 査 だ けでは、
病 状 を正確に把 握 することが難 しいケー
ス もある。
こ の状況 を
解
決 す る た め に、
我々 は新しい診 察の 手 段と し て、
従 来、
使 用さ れ てい なかっ た 感 覚で あ る触 力 覚を提 案 する。 その原 理を図5
に、
その利用 イ メー
ジ を図6
に示す。
現 在 触 覚は触 診とい う 形で 医 学 分 野に お い て使
用さ れ て い る。
し か し、
触 診に おける問 題は、
医 者の経 験に依 存 する部 分が大きい こと である。
そのた め経験
の少ない医者
で は適
切 な 診 察を行え ない可 能 性が あ る。
同様の理 由に よ り、
こ の 問題は、
触 診 以 外の 通 常の 診 察に おい て も起こ り得る。
そ こ で本 デ ザ イン では、
触 力覚 を 含んだ診 察 結 果 を数 値 化 し、
デー
タベー
ス を構 築 すること を提 案 す る。
そ し て、
患 者の診 察 結 果をデー
タベー
ス と照ら し合 わせ ることにより、
経 験の少 ない医者であって も適切 な診 察が 可能になる と考え られ る。
ま た、数
値 化さ れ た診 察 結果 は、
間 隔 尺度と し て取り扱
うこ と が 可能で あ る た め、
患 者に対し て も 理解しやすい N工 工一
Eleotronio Library
/tt
.
『
.
/ L−_ _
_
.
_ 1
/『 『 冖 m『 一
’
一
一一・
一一
一
.
一.
一
.
.
一
一
.
一
一
・
.
一一
.
.
.
.
.
一一
.
_
_
一一
.
_
__.
』
』
_
.
/
.
/
//
.
.
図3 BIMOS システム図Objective
Diagnosis
Exl51i野
轡
.
.
、 De @cis}on @ b s、 on 巳xamination . 巳mp巳ri nce&噸二
.
、
廿
2:
, t ,E
/lnformed
Simulatio
@Based
Consent
O
ration
D巳cisi based on巳マ
en
巳
nc巳
∴
∵
.
,
….囎贈 繍 獸judgement
…abd
°mlnab 図4
B
I M
全 体の 流れ 陣 舗NII-Electronic Library Service
診察結
果と な る と考
え られ る。
こ の よ う に
、
新しい感 覚である触 力 覚とデー
タベー
ス を診 察に組み合わ せ ること に よ り
、
よ り診 断の正確性
が向
上する と考
え られ る。
3.
4.
21nforrned
C
。nsentSystem
(以 下 「
ICS
」 と称 する) 現 在の手 術におい ては、
患 者の医 学 的な専 門 知 識 の不 足 が 原 因で、
患 者が治 療 方 針の決 定に積極
的に 携 わる ことが難しい。 本 デ ザイ ン に おいて は、
こ の状況 を解 決 する た め、
患 者に対し て医 学 的な専 門知識
お よび 手術
の判
断に 必要な情 報を分か りやす く提示 す る こ と を 提案す る。
これに よ り、
患 者 が 治 療 方 法の決 定に積極
的に 携わ ること が可 能 となり、
医者と患 者の協 調 医 療 が 行わ れ る と考え ら れ る。
本手術シ ス テ ムでは 「IOS
」を提 案すること で、
患 者 に対して医学的
な専門
知 識 および手 術の判 断に必要 な 情 報 を分 かりや すく提 示 するこ と に し た。
こ の 「ICS
」 の プロセス につ い て図7
に示 す。
まず、
3D
精 密人体モデリング7’
9} を行う。 3D
精 密 人体モデ
リ ングと }よcr ・MRI
を 用い患 者 自身の精 密 な人体モ デル を作 成す ることで あ る。
これ に よ り、
患 者に合っ た 手術シ ミュ レー
ションが可 能に な る。
つ ぎに、
患 者に対 し数 種 類の 手 術 方 法を提 案す 灘 ;ミ撫 論
a3b
』
「
鼕
』
、
「
L1
獻.
、
.
.
1.
.
.
.
_
.
、
.
Sugge
毓ions
of $urgjcal me電hOds
…・
・
・
・…
』
・
嚢・
・
…
・
・
・
1・
・
.
・
・
¶
1・
1T
.
一
・
rT
一
追・
.
一
.
.
.
.
・
.
一
.
.
一
一
.
一
.
/t[’
Patien
妻趨
獻 細}
・
欄
ε
r
護
驟
idi
i
[}e緯1’
瀬黼liO
貸 of me 匙hoct
図7 1CSの 流 れ 図6 針 型 触 覚セ ンサ る。 こ の 際 デー
タベー
ス を活 用し たObjective
Diagnosisや患 者の判 断に必 要 な情 報 を提 示 する。 こ れ に は、
直接
医者
に聞くのを躊 躇 する ような 情 報 (医 者の 過去の 手術 成 功 率など)や、
簡 単 な 手 術シ ミュ レー
ショ ンの結
果も提
示する。
こ れ ら を 図8
のよ う に大 型3D
ディ ス プ レイ 等を使 用し、
患者に とっ て わ か りやすい形で情 報 提 示 を行 う。こ のよ う に
、患者
に とっ て 理解
し やすい情
報 提示 をし、
患 者の 医学 的 専 門 知 識 を 補うこと に よ り、
患者
が治療方針
の決 定に積 極 的に携わる こと が可 能に なる。
こ の結 果、
患者
と 医者が協力 して 手術 方 法を 選 択 する 「協 調 医 療」が 実 際に行え る と考え られ る。
3
.
4.
3
Simulation
Based
Operation
System
(以下 「
SBOS
」 と称 する)今
回提案
し た 手術システム 「BIMOS 」 におい て は、
今まで の手術
の流
れ で は確 立さ れ ていなかっ た新 し utHizingda
重abase…
一r
■
鬮勝
’
”
の
リ
へiil
・f
。mati 。n・necessary・fO
・d
・・isi・ni
図 8 1CSに お け るDisplay74 SPECIAL ISSUE OF JSSD Vo]
.
12No.
42005 デ ザ イン学 研 究 特 集 号い段 階と して 「手術の
準
備 」 を提 案し、
「シ ミ ュ レー
シ ョ ン」 を 行 う 段 階 を 設 け た。
シ ミュ レー
シ ョ ン を行う利 点と し て手 術の練 習が で き るこ と が あ る。
さ ら に、
その動き を記憶
し、
手術
に お い てロボッ ト に再 現 させ ることで、
自動 的に手 術が行えるよ う に な るこ と も挙 げら れる。
こ の こ と に より 人為 的なミ スを減
らす
こと が で き る と と も に、手術時間
を短縮
でき、
患 者 や術
者へ の負
担が軽減
さ れ る と考
え られ る。
以 下に具 体 的 な 「SBOS 」 につ い ての 説 明する。
シ ミュ レー
ショ ン は、
患者 自
身の3D
人体モデリ ン グに基 づいた 詳 細 な 画像
に対し て、腹腔鏡
下 手術
用 マ ニ ピュ レー
タ を用い て行う。
こ の と きマ ニ ピュ レー
タの 位 置はGPS を 用い て把 握 し、
リ ア ル タイム で3D
画 像 に重ね合わ せ て表示する。
さ ら にマ ニ ピュ レー
タで臓 器に負 荷 を加 え た 場 合、
視 覚 的には 臓 器 変形補 償 技 術1[D を 用い て3D
ディス プレ イ 上で臓 器 の変形 を提示する。
そ して感 覚 的には、
マニ ピュ レー
タ に加わ る反力をデー
タベー
ス か ら割 り出して操 作 部に提示する。
以E
の技 術を用い る ことで シ ミュ レー
ショ ン が臨 場 感の ある もの になると考 え られ る。
ま た、
シ ミュ レー
ショ ン を行
うこと で、
マ ニ ピ ュ レー
タに切 除・
縫 合 など段 階ご との動 き を正確に 記憶さ せ ること が 可能にな る。 これによ り術 者は手 術の一
連の流れ を後で把 握・
確 認す ること が で き る。
仮
に、
シ ミュ レー
ションの段 階で マ ニ ピュ レー
タ を 誤っ て操 作し た場 合で も、
後に その部
分の 動き を削
除・
編 集 する こ と が可 能である (図9
)。
臓器移 植など、
開腹手術のため の シ ミュ レー
シ ョ ン を行う際には、
術 者 自 身の 手の 動き を 記憶さ せ る。
そのた め に、
セ ン シ ングアー
ムの先端
に取り付 けら れ たカ バー
を術者
の指
に固定
する。
こ の アー
ム やカバー
に は、
触 覚・
力 覚 ディ ス プレイID が 搭 載 さ れ て い る。
こ れ に よ り触 力 覚が提示 さ れ る。
ま たデ
ィ スプレ イ に関
して は、
Head
Meunt
Display
(以下
、
HMD
と称
す) を採
用 する。
こ れ を術者
が装着
し、
そ こか ら3
次元的な視 覚 情 報を 得る (図10
)。
こ のHMD
にGPS
を3
機 搭 載 すること に よ り、
首の傾き や体
の動
き に合
わ せ て視界
が変
化す
る よ う に なっ て い る。
こ のた め、
よ り実 際に近い シ ミュ レー
シ ョンを 行う こ と が可能に な る と考え ら れ る。
さ ら に動き を 正確に記 憶さ せ、
シ ミュ レー
ショ ン後に作 業を編 集 すること も可 能に な る。
こ の よ うに シ ミュ レー
シ ョ ンを行う と同 時に マニ ピュ レー
タの動き を記 憶し た。
そ して、
そ の動き を 手 術 中に再 現させ る こ とによ り実 際の 手 術を行う (図11
)。
な お、
縫 合な ど再 現が 比較
的簡単
な過 程に おい ては、
記 憶さ せた 動 作 を速めて実 行さ せ、
手 術 時 間を短 縮 すること ができる。
さら に、
手 術に よ り 記 憶し たマ ニ ピュ レー
タ と術 者が一
緒に手 術す るこ と は、
あ たか も術 者の手が増えたか のよ う な感 覚と な る と考
え ら れ る。
これ は 人 とロボッ ト が 「協 調」 し て手 術 を行っ ている といえ る。 そし て人とロボ
ッ トが 「協調」 し て手術を行うこ と に よ り、
手 術 時間 が さ らに短縮さ れ、
患者
や術者
の負
担の軽
減を 図るり
図9 腹 腔シ ミュ レー
ショ ン 図10 開 腹シミュ レー
ショ ンNII-Electronic Library Service こと が 可能と な る
。
し か し、
実 際の手術に おいて は、
シ ミュ レー
シ ョ ン の段 階で想 定さ れ な かっ た 危 険な状 況が発 生する可 能 性 が ある。 これ につ い ては、
マニ ピュ レー
タに緊 急停 止ボタンや 手 動 切 り替 え機 能を取り付けて対応 する。
また、
実 際の手 術 はシ ミュ レー
ショ ンと異 なり、
患 者の心臓の脈動 に よ り臓 器が微 動す る。
そ こで、
高 速カ メ ラ で 心臓の動き を把 握し、
同 期 補 償 機 能IZ) を 取 り付 けることにより、
ス レー
ブ 部や設 置 された3D
ディ スプレイの画像
h
に おい て も補償
する。
3
.
5
シ ス テ ム
実
現の た め の機構
デ ザイ ン3
.
5.
1
自動 挿 入トロカー
ル 腹 腔 鏡下 手術に おいて 最 も難しいと さ れ ているプ ロセス の1
つに、 トロカー
ルの挿 入 が ある。 現 在で は、
術 者が内視 鏡に よ る ミ クロ的な 画像を見 なが ら 手 動で トロ カー
ルを挿 入 するのが一
般 的な方 法であ る。
し か し、
これ で は力を加え る際に手 振れが 発生 す る ほ か、
血管な どの位 置 関 係をマクロ的に把 握で きないため、
危 険を伴う問 題がある。そ こで
、
新た に 図12
に 示すよ うな 「自動挿
入 トロ カー
ル」 を提 案す る。
これ は 患者の3D
精 密人体モデ
リングであ らか じ めシ ミュ レー
ト し記 憶さ れて い た位 置に、
自動 的に トロカー
ルを 挿 入する もの で あ る。
この 時、
3D
モデル に 基 づ く画 像 処理技
術を用 いて危 険領 域を確 認し回 避 する。
ま た、
その際 ト ロカー
ルの iFEk
な 位 置 把 握はGPS
を 用いて行うこと と し た。
3
、
5.
2
Simulation
Based
Operation
System
にお け る鉗 子 本 作 品では 腹 腔 鏡 下 手 術お よ び その シ ミュ レ
ー
シ ョ ン を行うこと を想 定し、
図13
に 示すよ う な2
種 類 の鉗 子 をデ
ザ インした。.
・
方の鉗F
は、
主に于術 中に 人 が操 作 すること を 考えてデザインした。 中 澤らの研 究に よ る既 存の マ影
♂
轡
図11 協調手 術 図12 自 動 挿 入 トロカー
ル 図13 2種 類の鉗 子 76 SPECIAUSSUEOFJSSDVo1、
12N(,,
42005 デザ イン学研究特 集号 N工 工一
Eleotronio Library図14 マ スタ
・
ス レー
ブー
体 型マミピュ レー
タ 図15 階層 的制 御 手法 図16 GMG セ ン サ 図17 超 音 波モー
タ スタ・
ス レー
ブー
体 型マ ニ ピュ レー
タ (図14
)13〕の 構 造を改 造し た もので あ る。
これ は、腹
腔 内に挿入 さ れ る ス レー
ブ 部とマ スタ部が一
体となっ た、
使い や すい構造
に なっ ている。
ま た、
簡 単 な 構 造を して い る た め、
力覚 提示 も 可能で ある。
他 方の鉗 子は
、
主 に自動で動くこと を考
え てデ ザ イン した。
事 前の シ ミュ レー
シ ョ ンを行う時に は、
術者
が手動
でマ ス タ部を操 作し、
その動き をロ ボッ トに記 憶さ せ る。
そし て、
実 際の手術
に お い て はス レー
ブ部を 記憶して いた 通 りに自動で動かす。 こ の 鉗 子の特 長は、
緊急 時のみマ スタ部で操 作が 可能な 点である。 緊 急 時には前 野ら に よ り研 究さ れてい る 階層的 制 御手法 (図15
)14 〕を 用い てマ スタ部の動き が記 憶 され た 動 き よりも優 先される。
そ して、
こ の 鉗子の先端に はCMC
(触 覚 )セ ン サ (図16
)⊥5}を取 り付け る。
これ に よ り、
患部
の触力覚を術 者が随 時 把 握 することが 可能になる。 さ ら に、
こ のCMC
セン サ は鉗 子が 自動で動い て いる際も有 効に使われ て い る。 具 体 的に は、患者
に対し て危険
な動
き を し た場
合には、
鉗子に大きな 力が か かる。
すると、
セ ンサ が極 度にス ト レスを感
知す る。
こ の よ う な場 合は、
鉗 子が緊 急 停 止をする様に設 定した。
また、
鉗 子の 可 動 部に は前野 らの超 音 波 多 白 由度モー
タ (図17
)16) が取り付け られ ている。
これ に よ り、
小 型 で かつ多
彩 な 動 き を実 現した。
4 .
基礎 研 究型 協調 デザ イ ン の実施 結 果に対 する考 察 本 デ ザイ ンにおい ては、
「基 礎 研 究 型 協調デ ザイ ン 」 を実 施 する こ と に よ りデザ イ ンを進め て きた。
これ は、
非日常 的な環 境での デ ザインに対 応し た手 法で ある。
ま た、
こ の協 調 デザイン の 実 施に よ り、
基 礎 研 究におい て新 しい価 値の導 出 ができ、
新 た な 研究
課 題が抽
出で き る効
果も期待
さ れ ている。
そ こ で、
これら の効 果につ い て、
本 作 品で協調 し た研 究 を考
察す る。
4 .
1
触 覚セ ン サ 触 覚センサ は、ODS
で診 察 時に新た な感 覚と し て 触 力覚を導入するために使 用した。 今回デザイン し た こと に よ り、
新しい価 値と して、
今まで医学の分 野で は考え られ てい な かっ た触 覚を用いるこ と を導 入 した。
しか し、
こ の シ ステム に触 覚セ ン サ を使用 する た め に は、
小型化
と正確
性が必要
であるといえ る。
特に、
小型 化は 人体に傷と して残ら ない程 度の 大き さ で あ ること が 望 ま れ る。
さ ら に、デー
タベー
ス構 築のために、
人 体のあらゆる部 分 (臓 器 など) の触 力覚 デー
タ を蓄え る必 要がある。
NII-Electronic Library Service
4.
2
マ ス タ
・
ス レー
ブー体
型マ ニ ピュ レー
タ マ ス タ・
ス レー
ブー
体 型マ ニ ピ ュ レー
タ は、
SBOS
で提 案 した2
種 類の鉗子のひ とつ で あ る、
人操作
用鉗
子に お い て使
用した。
これ に よ り、
今 後ロ ボッ トによる 自動の手 術を行っ て も、 人が鉗 子を操 る こ と は必 要である と考
え られ る。
そ の た め、
手 動 の鉗 子は今 後も必 要で あ り、
研 究は有 用で あるとい え る。
今 後の課題と し ては、
今まで以上 に術 者が操 作 時に直 観 的に扱 えるものになるこ とが望まれる。
4
.
3
超
音波
モー
タ 超 音 波モー
タ は、SBOS
に おけるAUTO
用 鉗 子の 先 端に取 り付け ら れて い る。今
回、
デ ザイ ンに超音
波
モー
タ を採用 し た 理由は、
従来
の直流
モー
タ よ り も大 きな トルク が得られ、
さ らに自動 制 御による モー
タの駆 動 も安 定 する か ら である。
こ のよ う に、
超 音 波モー
タ は医 療の分 野でも活 躍 することが 確 認で きた。 今 後の課 題 と して は、
小さい鉗 子の先 端に取 り付 ける た め に 小型 化 すること、
ま た鉗子 は臓器 を つ か み 上げ
る な どの 動 作を行う た め に駆 動 トル ク を 大き くする こと が 望 ま れる。
4.
4
階 層 的制 御 手 法階 層 的
制御
手 法はSBOS
に お け るAU 「
1
()用鉗
子の 制 御に用いた。 今回デ ザイ ンしたこ とによって、
制御
手法を手術
の分野へ の応 用を 可能
に し た といえ る。
さ ら に、
医学
の 分野の み な らず、
人 とロボッ ト が協
調し て作 業す る あ ら ゆ る分 野へ の応 用が 可能で あることが 示 唆した。 ま た、
今 後の課 題と し て、
階 層を切り替え る と きの速 度や 正確 性を向上する必 要性
を確 認し た。
4.
5
.
触 覚・
力 覚 ディ スプ
レイ触
覚 ・
力覚
ディ スプレ イ は、SBOS
の 開腹 手 術シ ミュ レー
シ ョ ンに用いられ た。
現 在、
力 覚を提示 で き るディスプレ イ は、
既に医学 分野へ と応 用さ れて いる が、
力 覚と触 覚を組み合 わせ た ものは存 在しな い。
触覚
と 力覚
を組み合わ せ る こ と に よ り、
臓 器の触
り 心地な ども再 現で き、
さ ら に、
リ ア リ ティー
の ある提示 が可 能になるはずである。
今 後は、
手 術の78 SPECIAL ISSUE OF jSSD VoLt2 No
.
42005 デ ザ イ ン 学 研 究 特 集 号シミュ レ
ー
ション との連携
を強
化 すること と、
シ ミ ュ レー
シ ョ ンに お け る触力覚 提示 に お け る時間的を 少な くする こ とが課 題で あ る。
5
.
結 言本デ
ザ インに お い て は、患者
のみ な らず術者
に対 しても負 担 が 少 ない手術シ ス テム を提 案 する。 その シス テ ム を実現する た めに、
デ ザイ ン面と 工学 面の2
つ の アス ペク トに焦 点を合 わせ た。
まず
、
デ ザイン面で は、
生体 環 境な どの非日常 的 環 境でのデ
ザ インに必 要と さ れ ている 「基 礎 研 究 型 協 調 デ ザ イン 」 を行っ た。 こ のデザ インを行 うこと によ り、
科 学的、
工学 的知見 を 手術システ ムに適用 し た。
つ ぎに、
工学 面で は、
新 た な工学の パ ラダイムと し て 「生 命化
」 を挙 げ 工学
にお ける 「生 命 化」 の 方 法と して、
「生 命模 倣」と 「生命・
人工 シ ス テ ム統 合」 を手 術シ ス テ ムに適 用 した。以上の
2
つ のア スペク トか ら、
新しい手 術シ ス テ ム 「BIMOS
」 を提 案し た。
「BIMOS
」は、
診 察か ら 手 術に至る手術全体のプロセスを 対象と し たシ ス テ ム で あ り、
「ODS
」、
「ICS
」 お よ び 「SBOS
」 の3
シス テ ム か ら構 成 されて いる。
「
ODS
」 は、情報
システ ム で あ るデー
タベー
スと 技 術システ ムである触 力覚センサによる触 力覚 情 報 を含
んだ 診 察 結 果を 「イ ンテグレー
ション 」 さ せ る シ ス テム で あ る。
こ の シ ステ ム に よ り、一
般 的 な 診 察情
報を 示 す こ と が 可能と な り、
た と え経 験の少な いな医 者で あっ て も、
提 示さ れ た情 報を確 認す るこ とで、
適 切 な 診察が可 能になる。 以 上によ りこ の シ ス テ ム は、診断
の 正確
性向
上 を 図 ること が で き た と 考え ら れる。 「ICS」 は、
人間シ ステム である患 者と医 者の関 係、
情 報シ ステ ム であるデー
タベー
ス、
お よ び 技 術シス テ ム で あ る3D
デ
ィス プレ イ を 「イ ン テグレー
シ ョ ン 」 させ たシ ス テム で ある。
こ の シ ス テ ム に よ り、
患 者の理 解し やすい提 示 方 法で医 学 的 専 門 知 識 を 補 うこ とが可 能となる。 そのため患 者が医 者と協 調し て治 療を行 うこ とで、
患 者の治 療 に 対 する信 頼 性 を 向上でき たと考え られる。
N工 工一
Eleotronio Library「
SBOS
」 は、情報
システ ム で あ る 人 とロボットの 情 報の交流 と、
技術 シ ス テ ム であるマ スタ・
ス レー
ブー
体 型マ ニ ピュ レー
タ や超 音 波モー
タ を 「イン テ グレー
ショ ン 」 さ せ たシ ス テ ムで あ る。
まず、
手術 の準 備 と して シ ミュ レー
シ ョ ンを行い、
その動 き を 編集し、
手術用ロボッ トに記憶さ せ る。
つ ぎに、
手 術時 に は、
記憶さ せ た 動 き を 再 現 さ せ、
医者と協調 して 手 術 を行 う。
これに よ り医 者の負 担 が 軽 減さ れ、
手 術の安 全 性 向上を 図る ことがで き たと考え ら れ る。
本 デザ イン では以上の3
つ の シ ス テ ムを 「イン テ グレー
ショ ン」 し た。
具体 的には、
「ODS
」 によ り.
一
般 的な診察情報
を考慮
し た診断情報
を操作 ・管
理 し、
「SBOS
」 によ り詳細な手 術シ ミュ レー
シ ョン の 情 報を操 作・
管理 した。
そ して、
それらの システム を 「ICSI
に 統合 化し た。
そ れ に よ り、
情 報を 欠損 な く患 者に提 供できるため、
患 者 が 自身
の治 療に お ける要 求を医者に適 切に伝 達で きる。 その伝 達さ れ た 要 求 を もと に、
医者は 各患 者の 要求に配慮 する こ と が 可能
と な る。
以E
に よ り、
「BIMOS
」 は 医者の 負 担 を 軽 減さ せると ともに、
各 患 者の考え る生 命の 質を 向h
し う る システ ム で あ る と考え ら れ る。
No.
2,
Page77−
81,
20049)KUROSAKI T
.
,
UNEMURA Y.
,
SUZUKI N.
,
HATTORI A.
,
TAKAHASHI S
.
,
ARIIZUMI M,
:Use of Segmented Three−
Dimensional Liver lmages in Hepatectomy with a New
Concept of Subsegmentation :aStep in Virtual Reality
−
Aided Surgery,
Jikeikai Med J,
Vol.
50,
No.
2,
Page59・
68,
200310) 橋爪 誠 :手術 支援ロボッ トの現状 と将 来
,
日本ロボッ ト学会誌 Vol
.
22,
No.
4,
423−
425,
200411)KONYO M
.
,
TADOKORO S,
、
HIRA M.
,
:Quantitativeevaluation of artificial tac電ile feel display integrated with
visua }information
,
20021EEEIRSJ INTERNATIONALCONFERENCE ON INTELUGENT ROBOTS AND
SYSTEMS
,
VOLS 1−
3,
PROCEEDINGS :3060−
30652002 12) 岸 宏 亮,
中 村 仁 彦:低 侵 襲 化を支 援す る 臓 器 運動 補償 型ロ ボ ッ トシステムの 研究 第9回 日 本コ ンピュー
タ 外 科学 会大会 論 文集 69一
ア0,
2000 13)中 澤 和 夫,
北 林 皆 子,
北 祐 樹,
古 川 俊 治,
森 川 康 英,
北 島 政 樹,
神 野 誠,
松 日楽 信 人:腹 腔 鏡 下 手 術 支 援 用一
体 型マ ニ ピュ レー
タ の開 発 シミュ
レー
タ に よ る手 先 自 由 度 構 成の操 作 性の 評価,
日本機 会 学 会ロボティクス・
メカトロニ クス講演 会 講演論 文集
,
Vol.
2001,
No.
Pt.
3,
2A1.
D9 (1)−
2A1.
D9 (2)、
200t14)IMAZEKI K
.
,
MAENO T.
:Hierarchical control method tormanipulating !grasping tasks using multi
−
fingered robothand
,
IROS 2003 :PROCEEDINGS OF THE 20031EEE / RSJ LNTERNATIONAL CONFERENCE ON INTELLIGENTROBOTS AND SYSTEMS
,
VOLS 1−
4:3686−
3691200315) 本 間 将 人
,
昆 陽 雅 司,
前 野 隆 司 :カー
ボンマ イ クロ コイルを用 いた触 覚セ ンサ,
第22回 日本ロボッ ト学 会 学 術 講演 会,
2004 16)TAKEMURA K.
,
MAENO T.
:Design and control of anultrasonic motor capable of generating multi
−
DOF motion,
lEEE
−
ASMETMECH 6 (4):499−
506 DEC 2001【参 考 文献 】
1) 梶田昭 :医学の歴 史
,
講 談 社,
20032) 松岡由 幸 :デ ザイ ン と設計
,
日本 機 械 学会2004年 度 次大 会 講演 資料 集Vol
.
8378−
3813)MATSUOKA Y
.
:lntroduction of 21st Century Design School−
Another Type of Design for Life
−,
Proceeding of lnternationalWorkshop on Digital Design 31
−
33,
20044)YOSHlKAWA H
.
:General Design Theory,
lnd Des,
No.
155,
Page (JA)47
−
55,
(EN)56−
60,
48−
52,
54,
t9915)SAWABU N
.
,
OHTA H,
,
MOTOO Y,
,
OKAI T,
:lmmuno−
biochemical diagnosis of liver cancer
,
Gann Monogr CancerRes
,
No.
38,
Page59−
73,
19916)NAKAHARA H
.
,
WAKAMAlrSU H,
,
TAMURA S.
,
NAMBA K.
,
WATANABE R
.
,
FURUSAWA H.
,
SHIROUZU M.
,
MATSUT :Extension Qf Breast Cancer:Comparison ot CT and MRI
,
Radiat Med
,
Vol.
20,
No、
1,
Page17−
23,
20027)MORIS 田TA S
.
,
AWAI K,
,
HAYASHIDA Y.
,
lMUTA M,
,
ヤAMASHIIAY
,
HONDA S.
,
HATANAKAY.
:Roie of Preoperative Helical CT betore Laparoscopic Cholecystectomy:Evaluationof Gallbladder and Peritoneal Adhesion
,
Radlat Med,
Vol.
22,
No2
,
Page111−
115,
20048)KIMT
.
,
MURAKAMI T.
,
HORI M.
,
KUMANO S.
,
SAKONM
.
,
NAKAMURA H.
;Efficacy of Multi−
slice Helical CT Venography for the Diagnosis of Deep Venous Thrombosis :Comparison with Venous Sonography