多数のタスクが動作する環境下でのタスク起動応答性評価
2
0
0
全文
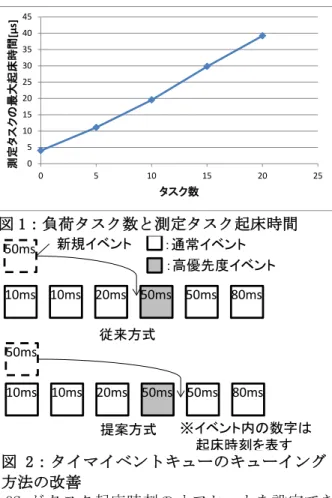
(2) 情報処理学会第 79 回全国大会. S/W. 測定タスクの最大起床時間[μs]. H/W. 表 1:評価環境 評価ボード U00B0021-02-CPU CPU EMMA Mobile1-D ARM Coretex-A9:533MHz I-cache:32KB D-cache:32KB L2 cache:256KB メモリ DDR-SDRAM:64MB OS T-Kernel2.0(オープン版). 45 40 35 30 25 20 15 10 5 0 0. 5. 10. 15. 20. 25. タスク数. 4. 評価方法 4.1. 構成 測定タスク1つと負荷タスクを複数生成し,測 定タスクの起床時間を測定した.負荷タスクの数 は 5,10,15,20 のそれぞれで測定した.T-Kernel では,周期的に実行する処理を実現する場合,周 期ハンドラを用いる.そこで,1 タスクにつき1つ の周期ハンドラを設定し,各周期ハンドラからタ スクの起動 API(tk_sta_tsk)を呼び出すようにし た.周期 Tms,優先度 P であるタスクを{T,P}と 表現する.今回は,測定タスクを{10,3},負荷タ スクを{20,10}とした(値が小さい方が高優先度). また,Tick 周期は 10ms とした. 4.2. 測定ポイント タイマ割込み要求時から,タスクが起床するま での時間を測定した.具体的には,タスク起床直 後に,タイマ割込みのソースとしているタイマ (以降:システムタイマ)のカウンタ値を参照す るようにした.今回の環境では,システムカウ ンタがタイマ割込み発生時に0にリセットされ るため,この値をタスク起床時間と定義できる.. 5. 評価結果 測定した最大起床時間を図1に示す. 横軸が負荷タスクの数,縦軸が測定タスクの最大 起床時間である.負荷タスク数の増加に伴い高優 先度に設定した測定タスクの起床時間が線形に 増加するという結果を得た. なお,T-Kernel のように周期ハンドラをユー ザが実装できる場合,周期ハンドラ内で高優先な 処理を行うことも可能である.しかし,周期ハン ドラを起床する際に参照するタイマイベントキ ューは同時刻のイベントは FCFS 方式で挿入され るため,周期ハンドラの起動順序を保証するこ とはできない.よって周期ハンドラの起動時間も タスクの数に依存する.. 6. 回避方法 5章で示したタスク起床応答性劣化の回避方法 について,以下の 2 通りが考えられる. (a) タスク起床時刻のオフセット調整. 1-22. 図 1:負荷タスク数と測定タスク起床時間 50ms. 新規イベント. :通常イベント :高優先度イベント. 10ms 10ms 20ms 50ms 50ms 80ms 従来方式 50ms 10ms 10ms 20ms 50ms 50ms 80ms 提案方式. ※イベント内の数字は 起床時刻を表す. 図 2:タイマイベントキューのキューイング 方法の改善 OS がタスク起床時刻のオフセットを設定でき る場合,高優先度タスクと低優先度タスクの起床 タイミングをずらすことで回避可能である.た だし,全てのタスクのタイミングを管理する必要 があり,設計工数の増加が予想される. (b) タイマイベントキューのキューイング方法 の変更 高優先度イベントがある場合,そのイベントを 同時刻のイベントの先頭に挿入するよう,タイ マイベントキューを修正することで,特定の周期 ハンドラを優先的に起床できる(図2).この周期 ハンドラ内で高優先度処理を行うことで処理開 始の遅延を回避することが出来る.. 7. おわりに 本研究では,タイマ割込みハンドラによるタ スク起動においてタスク数とタスク起床応答性 能の関係を評価した.その結果,高優先度タスク の起床応答時間が低優先度のタスク数に応じて 長くなることが判明した.そこで,本現象の回避 するための 2 つの方法を示した.今後は本方式 を実装し,評価を行う予定である.. 参考文献 [1] 浦口 正彦 ,石川 知雄:リアルタイム OS の 性能評価に関する研究(1),情報処理学会全 国大会講演論文集,Vol.45,p10-11(1992). Copyright 2017 Information Processing Society of Japan. All Rights Reserved..
(3)
図
関連したドキュメント
直流電圧に重畳した交流電圧では、交流電圧のみの実効値を測定する ACV-Ach ファンクショ
自閉症の人達は、「~かもしれ ない 」という予測を立てて行動 することが難しく、これから起 こる事も予測出来ず 不安で混乱
出来形の測定が,必要な測 定項目について所定の測 定基準に基づき行われて おり,測定値が規格値を満 足し,そのばらつきが規格 値の概ね
運航当時、 GPSはなく、 青函連絡船には、 レーダーを利用した独自開発の位置測定装置 が装備されていた。 しかし、
手続内容(タスク)の鍵がかかっていること、反映日(完了日)に 日付が入っていることを確認する。また、登録したメールアドレ
環境管理棟の測定結果でも、全ベータとス トロンチウムの結果が大きく逆転している ことを確認。全ベータの数え落としの調査
それらのデータについて作成した散布図を図 15.16 に、マルチビームソナー測深を基準に した場合の精度に関する統計量を表 15.2 に示した。決定係数は 0.977
を負担すべきものとされている。 しかしこの態度は,ストラスプール協定が 採用しなかったところである。
