ドライブレコーダによる事故映像を用いた
自転車・歩行者事故発生要因の解明
― 2019年度 タカタ財団助成研究論文 ―
ISSN 2185-8950
研究実施メンバー
研究代表者
名古屋大学大学院工学研究科
1/4
報告書概要
四輪車対自転車事故では出会い頭事故が最も多く,次いで四輪車が右左折時の事故が多い. 自転車事故件数を低減のためには,出会い頭や右左折時の事故発生要因を分析する必要があ る.本研究ではドライブレコーダを用いて対自転車事故の発生要因を分析した.ドライブレ コーダの映像では,自転車乗員の行動および四輪車の運動を把握することができ,自転車乗 員の行動分析が可能であり,事故再現も容易であった.事故データ 180 件,ヒヤリハット 5,881 件を用いて,事故とヒヤリハットの違いを調べた.ドライビングシミュレータを用いて四輪 車対自転車事故を被験者により再現し,運転者の反応を調べた.また,事故再現を行い,衝 突被害軽減ブレーキ(AEB)が作動したときの衝突回避効果を検討した. 出会い頭事故では道路幅員が狭く,住宅等の建物が死角になっている無信号交差点で発生 する場合が多い.四輪車から自転車がみえる時刻から衝突までの時刻は,速度が 30 km/h を 超えるとほぼ 1.3 s に近づいた.これは自転車の移動距離 4.3 m に相当し,道路幅と関連す る.自転車が現れた時の衝突余裕時間(TTC)について調べると,出会い頭の事故では 2 種類 の類型が存在した.一つは,四輪運転者が自転車に気付くのが遅れ,ブレーキ反応も遅れた ことによる事故(TTC>1.2 s)であり,もう一つは,自転車の飛び出し事故である(TTC<1.2 s).事故発生確率から,発生確率 50%は車両減速度 0.55G に相当し,四輪車が制動を開始し た時点において,停止までに 0.55G 以上の減速度を必要とする領域に自転車乗員が入るかど うかで事故とヒヤリハットが区別される. 右折時の場合は道路幅員が広く,四輪運転者が脇見をしており,衝突回避をしない場合が 多い.四輪車の速度が遅く,四輪車が一旦,減速して交差点に進入する場合が多いことから, TTC は事故とヒヤリハットではともに,自転車が交差点に進入した時点では四輪車が衝突可 能な領域にあり,四輪運転者が自転車に気付くことができれば回避が可能である事例が多い. ドライビングシミュレータによる被験者実験を行い,ドライブレコーダ映像から確認され た TTC の大きな事故と小さな事故を再現した.TTC が大きなシナリオでは,被験者のブレー キ反応時間が衝突回避に大きな影響を及ぼす.TTC が小さなシナリオは被験者のブレーキ反 応時間,TTC,ブレーキをかけ始めた時の速度,加速度が全て満たされたときに衝突回避が可 能であった. ドライブレコーダ映像から事故再現を行い,さらに,衝突被害軽減ブレーキ AEB を装備し たときのシミュレーションを AEB のパラメータを変えて実施した.運転者の制動遅れに起因 する出会い頭事故ではセンサー視野角の拡大が有効であった.一方,自転車の飛び出しに起 因する TTC が小さい出会い頭事故では AEB による衝突回避が困難であった.また,右左折事 故では自転車の速度が低いため,センサー視野角の拡大が有効であったが,走行する四輪車 が横断歩道を歩道近くで通過するときに,自転車が歩道から道路に入った場合には,四輪車 が停止することが困難であった.2/4 本研究により自転車事故が運転者の制動遅れと自転車の飛び出しに起因することが示され, 特に,前者では AEB が有効であった.自転車の飛び出しについては,危険を予知するプロア クティブな運転が衝突回避に有効であり,それはドライビングシミュレータから具体的には 交差点を通るときに運転者がアクセルペダルを戻していることと関連付けられた.また,車 車間通信などにより,自転車が運転者から見える前での,運転者へのウォーニングが有効で あると考えられる.
3/4
目 次
報告書概要 ··· 1/4 第 1 章 ドライブレコーダ映像の分析 ··· 1 1.1. ドライブレコーダの概要 ··· 1 1.1.1. ヒヤリハットデータの概要 ··· 1 1.1.2. 事故データの概要 ··· 2 1.2. 分析方法 ··· 3 1.2.1. 事故形態の分類 ··· 3 1.2.2. 分類項目 ··· 5 1.2.3. 距離計測方法 ··· 5 1.3. 分析結果 ··· 7 1.3.1. 事故形態 ··· 7 1.3.2. 四輪車と自転車の速度 ··· 8 1.3.3. 視認性 ··· 9 1.3.4. 回避行動 ··· 10 1.3.5. 自転車乗員の相対軌跡 ··· 11 1.4. 1 章のまとめ ··· 14 第 2 章 事故と衝突余裕時間 ··· 15 2.1. 速度時間線図 ··· 15 2.1.1. TTC(Time to Collision) ··· 15 2.1.2. 制動限界 ··· 16 2.2. 結 果 ··· 17 2.2.1. 出会い頭 ··· 17 2.2.2. 右左折 ··· 20 2.3. 2 章のまとめ ··· 20 第 3 章 ドライビングシュミレーターを用いた事故再現 ··· 22 3.1. ドライビングシュミレーターの概要 ··· 22 3.2. 実験方法 ··· 22 3.2.1. 実験シナリオ ··· 22 3.2.2. 被験者 ··· 234/4 3.3. 実験結果 ··· 24 3.3.1. 実験結果の概要 ··· 24 3.3.2. 各変数の分析 ··· 25 3.4. 3 章のまとめ ··· 26 第 4 章 衝突被害軽減ブレーキの効果検討 ··· 27 4.1. 事故再現方法 ··· 27 4.2. AEB の仕様とセンサーパラメータ ··· 27 4.3. 出会い頭事故 ··· 29 4.4. 右左折事故 ··· 30 4.5. 4 章のまとめ ··· 32 発表論文 33
1
ドライブレコーダ映像の分析
本章では,ドライブレコーダデータを利用して四輪車対自転車事故の分析を行った.事故事例 調査では,衝突直前の自転車の行動や事故の際に死角になりうる当事者以外の四輪車や歩行者の 有無等の詳細なデータが不明である.一方,ドライブレコーダでは車両前方の映像から詳細な状 況の分析が可能である.これまでの研究ではヒヤリハットの事故形態が事故の分布と同じ特徴を 示すものとして,ヒヤリハットによる事故要因分析が数多く行われているが,ドライブレコーダ の事故とヒヤリハットを比較した研究はほとんどおこなわれていない.そこで四輪車対自転車乗 員の出会い頭事故と四輪車右左折事故について,事故とヒヤリハットの分析・比較を行った.本 研究は,名古屋大学工学研究科倫理部会の承認(受付番号17-13)を得ている. ドライブレコーダの概要 1.1.1. ヒヤリハットデータの概要 本研究で用いるヒヤリハットデータは,東京都内,静岡市内,福岡市内,札幌市内のタクシー に搭載されたドライブレコーダから収集されたものである.1 カメラ仕様,2 カメラ仕様があり, 1 カメラ仕様では車両前方の映像データ,2 カメラ仕様ではそれに加えて車内の映像データを記録 している.これらのデータベースは,自動車技術会および東京農工大学が管理・運営を行ってい る.ヒヤリハット解析時におけるインターフェースを図1.1 に示す. ドライブレコーダは,ホリバアイテック社製堀場ドライブレコーダ試作品(1 カメラ),DR3031 (1 カメラ),DR6200(2 カメラ),DR9100(2 カメラ)の 4 種類が使用されている.衝突,急ブ レーキ,急ハンドル等により 0.45G 以上の前後加速度が車体に作用した場合にトリガーを発生さ せ,イベントが発生した時点及びその前10 秒,後 5 秒の映像データと車速,前後・左右・上下加 速度,ジャーク,緯度,経度やブレーキ,方向指示器の有無の数値データを記録する.収集され たデータはデータベース管理者の目視によって基本データ(日時,場所等),対象(人,自転車等), 自車状態(発進時,加速時等)等の項目によって分類される(図 1.1).このデータベースから四 輪車対自転車の事故を抽出した.さらにヒヤリハットは表 1.2 に示される基準に従って,高・中・ 低・反応の4 レベルに分類されている.本研究では反応レベルは実際の事故とは状況が異なるもの であるとして,分析対象から除外した.また,ヒヤリハットデータベースには,少数ではあるが 事故のデータも含まれている.四輪車対自転車のヒヤリハット10,523 件のうち,本研究の対象デ ータとしては,出会い頭が高レベルヒヤリハット 254 件,中レベルヒヤリハット 781 件,低レベ ルヒヤリハット941 件,右折時が高レベルヒヤリハット 129 件,中レベルヒヤリハット 686 件, 低レベルヒヤリハット953 件,左折時が高レベルヒヤリハット 208 件,中レベルヒヤリハット 876 件,低レベルヒヤリハット1,053 件であった.2
Fig. 1.1 Interface of Near-miss incident date Table 1.1 Parameters of near-miss-incident
Table 1.2 Level of near-miss incident data
1.1.2. 事故データの概要
事故データはヒヤリハットに加えて,2.1.1 項の自動車安全技術プロジェクトチームのプロジェ
クトにおいて,愛知県タクシー協会や名古屋市タクシー協会の協力のもと,愛知県内のタクシー 会社から提供されたものである.タクシー会社によってドライブレコーダの種類は異なる.ほと
3 んどのドライブレコーダでは,一定の加速度が車体に作用した場合にトリガーがかかり,事故等 のイベントが発生した時点及びその前後の映像データと車速,前後・左右・上下加速度,ジャー ク,地図情報やブレーキ,方向指示器の有無等のデータを記録する.事故解析時のインターフェ ースを図1.2 に示す.収集した四輪車対自転車事故 270 件のうち,本研究の対象データとしては, 出会い頭事故が83 件,右折時事故が 36 件,左折時事故が 61 件であった.
Fig. 1.2 Interface of accident data
1.2. 分析方法 1.2.1. 事故形態の分類 四輪車対自転車事故では様々な事故形態が存在する.事故形態ごとに発生要因が異なることが 予想されるので警察庁による事故統計に用いられている事故形態の分類を参考にして,分類を行 った(図1.3).本研究では,この分類を用いる. ・正面衝突・・・四輪車が直進中であり,右左折の意思がなくかつ,右左折の直後でもないときに, 自転車が四輪車の逆から接近してきた自転車と四輪車の前面で接触する場合を正 面衝突とする. ・追突・・・四輪車が直進中であり,右左折の意思がなくかつ右左折の直後でもないときに,四輪車 と同じ向きに走行している自転車に対して四輪車の前面で接触する場合を追突とする. ・出会い頭・・・四輪車が直進中であり,右左折の意思がなくかつ,右左折の直後でもないときに, 自転車が四輪車の進行方向に対して直角方向に接近し,事故が発生した場合を出会 い頭とする. ・出会い頭(左右方向指示器)・・・四輪車は直進中だが,方向指示器を出し右左折の意思があると きに自転車が四輪車の進行方向に対して直角方向に接近し,事 故が発生した場合を右左折待ちとする. ・追越・追抜時・・・四輪車と自転車がともに同じ向きに走行している際に相手を追い越す,または, 追い抜くときに接触する場合を追越・追抜時とする. ・進路変更時・・・四輪車が車線変更している,または車線変更直後に接触する場合を車線変更時と する.
4
Fig. 1.3 Type of car-to-bicycle crash
・すれ違い・・・四輪車と自転車が互いに逆方向に走行し,互いがすれ違うときに接触する場合をす れ違いとする. ・右左折時・・・四輪車が方向指示器を出し,右左折している最中または,右左折した直後に,自転 車と接触する場合を右左折時とする. ・転回時・・・四輪車が転回している,または転回直後に接触する場合を転回時とする. ・後退時・・・四輪車が後退しているときに接触する場合を後退時とする.
5
1.2.2. 分類項目
事故とヒヤリハットの特徴を分析し,それぞれのデータの比較を行うために明るさや,車線数
等の項目で分類を行った.項目の一覧を表1.3 に示す.項目は,ヒヤリハットデータベースによる
分類と交通事故総合分析センターがまとめている交通事故統計用語解説集を参考に決定した. Table 1.3 Parameters of accidents
1.2.3. 距離計測方法
ドライブレコーダの映像から四輪車と,対象となる自転車との距離を計測するためにNac image
technology 製の動作解析ソフト Movias Neo を用いた.画像からパース変換によって距離を算出す
る.図1.4 のように Movias Neo のパース変換画面上で,任意の 4 点をプロットする.そして,そ の 4 点間の実際の距離を入力することで図 1.5 のようにパース変換を行う.この際,横断歩道等 の道路標識や上空写真を参考にして 4 点間の距離をそれぞれ定めた.次に,四輪車と自転車の距 離を求めるために,ドライブレコーダ映像の各コマに対象となる自転車のタイヤと地面が接地し ている部分をプロットする(図1.6).これにより,図 1.7 のような四輪車に対する自転車の相対軌 跡を算出することができる.なお,軌跡を導出する際,ドライブレコーダの速度データを積分し て四輪車の走行距離を計算し,軌跡の妥当性を確認している.
6
Fig. 1.5 Perspective transformation
Fig. 1.6 Tracking method for cyclist position
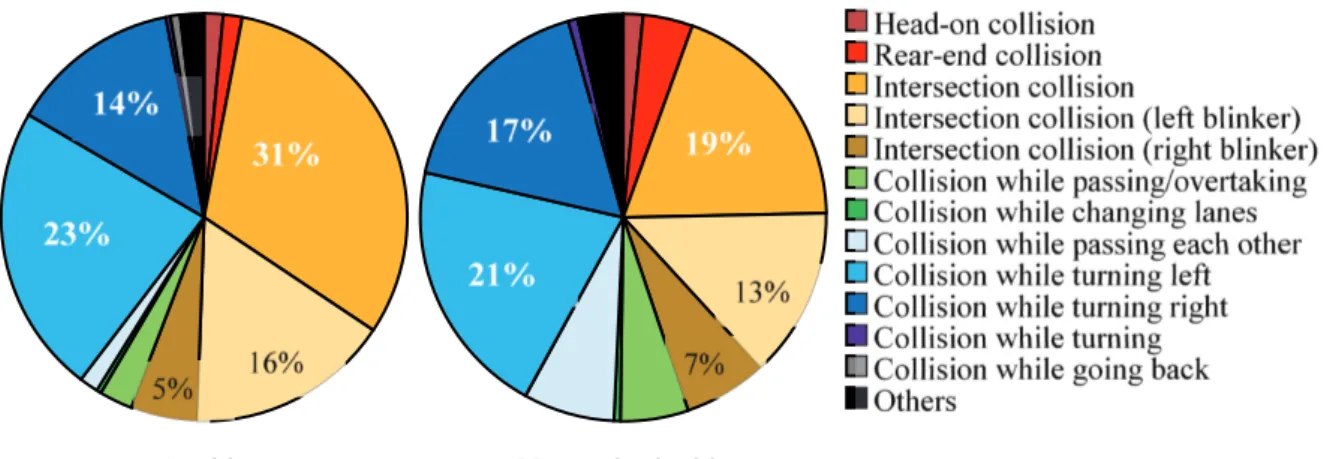
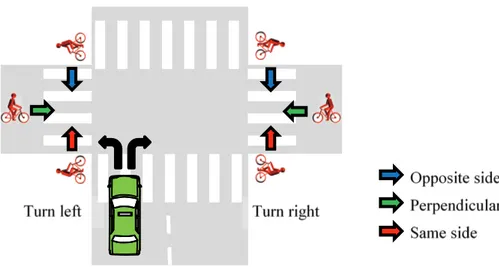
7 1.3. 分析結果 1.3.1. 事故形態 本研究で収集した事故,ヒヤリハットデータの形態別構成率を図 1.8 に示す.本研究では四輪 運転者に右左折の意思によって出会い頭を区別しているが,事故統計ではまとめて出会い頭とな るため,2017 年の四輪車対自転車の死亡事故における割合とほぼ一致している.この中で発生件 数の多い出会い頭,右左折時の分析中心に行った. 図1.9 に出会い頭におけるヒヤリハット発生件数を自転車の出現方向別に示す.右左折時にお ける四輪車が右左折前の直進する方向に対して,同一方向・直角方向・対面方向の 3 種類に分類 し(図1.10),発生件数を図 1.11 に示す.出会い頭においては,事故もヒヤリハットも四輪車に対 して自転車が右側から接近する場合が多い.右左折事故は四輪車の対面方向から自転車が接近す る場合が多いのに対し,ヒヤリハットでは左折時は四輪車と同一方向・対面方向の件数が同様で あるが,右折時は同方向の方が多い.
Fig. 1.8 Type of accidents/near-miss incidents in cyclist-to-car accident
8
Fig. 1.10 Cyclist directions with respect vehicle direction in turning right/left collision
Fig. 1.11 Direction of cyclist approarch in turning right/left collision
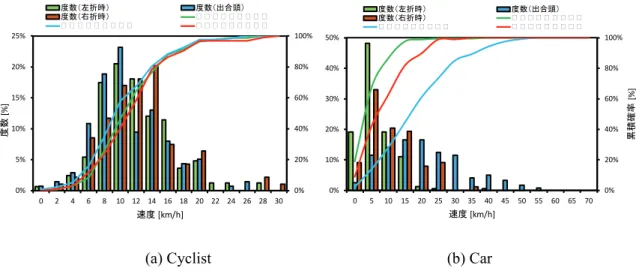
1.3.2. 四輪車と自転車の速度 自転車と四輪車の衝突時の速度分布を図1.12 に示す.自転車の速度分布は事故類型でほと んど変わらない.自転車速度の平均値は11.4~13.5 km/h にあり,事故類型,ヒヤリハット・ 事故でも同様の速度となっている.ただし,自転車が 20 km/h を超える高い速度で走行して いる事例も見られる. 四輪車では速度分布は事故類型によって異なり,出会い頭事故が一番高く,次が右折事故, 左折事故の順となっている.出会い頭の度数のピークは 20 km/h にあるが,なだらかに高速 度までその分布は続いている.s事故とヒヤリハットでは,四輪車速度の平均値は同様であ ったが,出会い頭ではヒヤリハットの方がやや高く,右折では事故の方が高かった.
9
(a) Cyclist (b) Car Fig. 1.12 Crash velocity of vehicle in right/left turn collisions
1.3.3. 視認性
自転車がドライブレコーダの映像から確認できるようになったときの視認性に対する障害物に
ついて,「Object」,「Vehicle」,「Pedestrian or Cyclist」,「None」の 4 種類に分類した.ここで「Object」
には柵や樹木等の永続的にその場所に存在する物体は全て含むものとする.また,対象となる自 転車が映像外から映像内に入ることで初めて確認される場合は,障害物がない状態とする.図1.13 に事故を死角の種類別に示す.「Object」が全体の約 5 割を占めている.これは,事故発生場所と 関係があり,出会い頭の多くは無信号交差点で発生し,その多くは住宅街や建物に囲まれた場所 にあるので,出会い頭の死角が「Object」になることが多い.右左折時は全体の約 5 割が視覚障害 物のない場合であり,ヒヤリハットは事故より死角がない割合が多い.障害物のある場合では出 会い頭と同様に「Object」が最も割合が多い.
Fig. 1.13 Type of blind spot in intersection and turning right/left collisions
0% 20% 40% 60% 80% 100% 0% 5% 10% 15% 20% 25% 0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 度数 [%] 速度[km/h] 度数(左折時) 度数(出合頭) 度数(右折時) 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 0% 20% 40% 60% 80% 100% 0% 10% 20% 30% 40% 50% 0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 累積確率 [%] 速度[km/h] 度数(左折時) 度数(出合頭) 度数(右折時) 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累 累
10
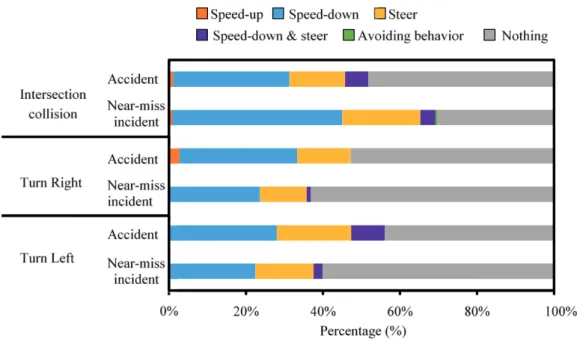
1.3.4. 回避行動
四輪運転者と自転車乗員の回避行動を「減速(Speed-down)」,「操舵(Steering)」「減速操舵(
Speed-down and steering)」,「回避なし(Nothing)」の 4 種類,自転車乗員の回避行動は「加速(Speed-up)」
「減速(Speed-down)」「操舵(Steering)」「減速操舵(Speed-down and steering)」「回避動作(Avoid)」
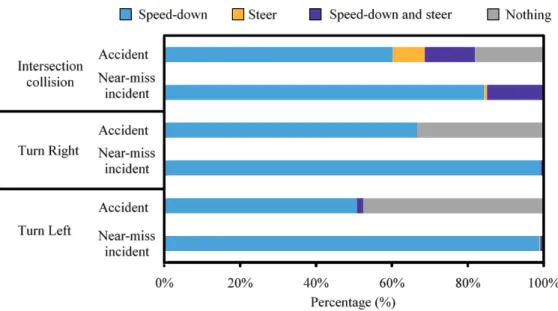
「回避なし(Nothing)」の 6 種類に分類した.自転車乗員の回避行動のうち「回避動作(Avoid)」 は減速や操舵等の回避行動はなかったが,接触をさけるため脚部のみ動かす動作があった場合を 「回避動作(Avoid)」とする.分類の結果を図 1.14,図 1.15 に示す. 四輪運転者の回避行動の多くは減速であった.また,操舵,減速操舵は出会い頭では一定数み られたが,右左折時にはほとんど見られない.出会い頭の場合,減速に加えて操舵による回避が 有効となる可能性があるが,右左折の場合は,四輪車の速度が低いことにより操舵を行わないと 考えられる.さらに,事故では,四輪運転者の回避行動がない割合は左折・右折・出会い頭の順 に多くなっている.このことから,四輪車の右左折時は衝突するまで対象の自転車に気づいてい ない場合が多いことも考えられる. 自転車乗員の回避行動の多くは回避なしであった.出会い頭では事故の場合の方が自転車乗員 が回避をしていない割合が多いが,右左折ではヒヤリハットの方が回避をしていない割合が多い. これは出会い頭の場合は四輪車の速度が高い状況での自転車の飛び出しが多く,自転車に回避の 時間がないこと,右左折では四輪車が低速であり,自転車乗員が四輪車の動きも考慮しているこ とが一因にあると思われる.
11
Fig. 1.15 Avoidance behaviors of cyclists in intersection and turning right/left collisions
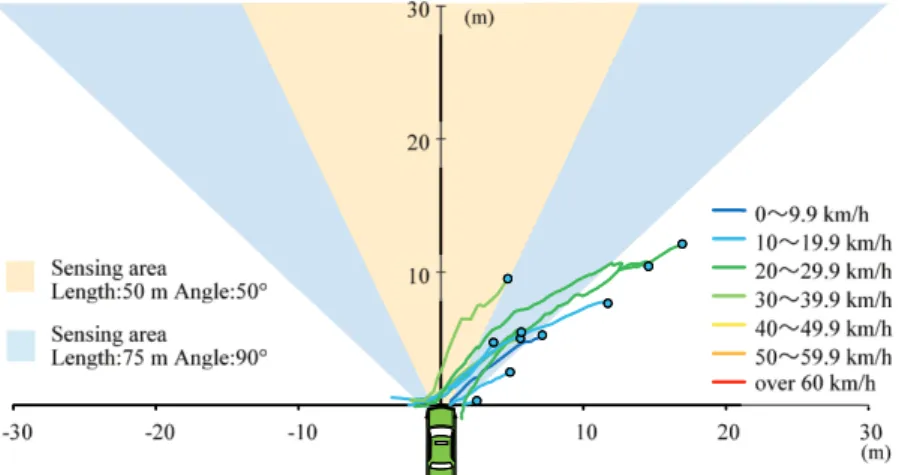
1.3.5. 自転車乗員の相対軌跡 四輪車に対する自転車の相対軌跡を,出会い頭の事故とヒヤリハット高レベルについて,図1.16, 図1.17 に示す.相対軌跡は自転車がドライブレコーダに初めて現れた時刻 𝑡𝑡a における四輪車速 度で色分けを行った.図のエリアは,四輪車の衝突被害軽減ブレーキ(自動ブレーキ)のセンシ ングエリアの例(50°, 90°)である.黄色のセンシングエリアは現在,歩行者用自動ブレーキとし て使われることの多い距離 50 m,視野角 50°(±25°)を示している.青色のセンシングエリアは Euro NCAP の対自転車用の自動ブレーキ試験に対応する距離 75 m,視野角 90°(±45°)である. 高レベルヒヤリハットでは四輪車の周辺に軌跡が存在しているが,これは四輪車と接触直前で停 止した事例があることによる.事故,ヒヤリハットともに四輪車速度が高い事例では,軌跡はセ ンシングエリアの中心線近くに存在し,速度の遅いケースはセンシングエリアの外にも存在する. 歩行者用のセンシングエリア(±25°)では多くの自転車がエリアの外にあるが,センシングエリ ア(±45°)ではほとんどの自転車がエリアの中に位置している. 次に,右左折時の事故における相対軌跡を,自転車の出現方向別に図1.18~図 1.21 に示す.右 左折の自転車の軌跡は,四輪車の中心線から左右に角度を持っていることが多い.軌跡上の丸印 は,自転車が交差点に進入した時刻での位置であり,丸印より四輪車に近い線は自転車が横断歩 道や交差点内走行していることを意味し,丸印より遠い線は自転車が路側帯や歩道を走行してい ることを意味する.四輪車右左折時の場合,自転車が四輪車と同一方向から現れる事例では,四 輪車から見て一方向のみに軌跡が存在した.それに対し,自転車が四輪車の対面方向から現れる 場合では,四輪車から見て左右両方に軌跡が存在した.自転車が四輪車と同一方向から現れる場 合では,ほとんどがセンシングエリアの外に存在している.
12
Fig. 1.16 Relative trajectories of accidents in intersection collision
Fig. 1.17 Relative trajectories of near-miss incidents in intersection collision
13
Fig. 1.19 Relative trajectories of accidents in turning right collision from opposite direction
Fig. 1.20 Relative trajectories of accidents in turning left collision from same direction
14 1.4. 1 章のまとめ 四輪車対自転車事故における出会い頭と右左折時の事故とヒヤリハットを周囲環境,発生場所, 四輪車の速度,自転車の相対軌跡を用いて比較した.出会い頭の場合,事故,ヒヤリハットとも に,四輪車からみて右側から自転車が現れる割合が多い.無信号交差点で発生する場合が多いた め,道路幅員が狭く,住宅等の建物が死角になることが多い.四輪車運転者の視線,四輪車の速 度,自転車との位置関係については事故とヒヤリハットで大きな違いはみられなかった. 右折時の場合には,事故とヒヤリハットはともに,出会い頭に比べて夜間に発生する頻度が高 く,信号を有する交差点で発生する事例が多いため,死角がない道路環境である場合が多い.ま た,出会い頭では四輪車の回避動作として操舵が見られたが,右折時には操舵による回避はほと んどみられず,回避行動自体がない割合が多い.それに加え,右折では四輪運転者は周囲の安全 確認を行っている割合が多い.事故ではヒヤリハットに比べて,道路幅員が大きい場合が多い. また,自転車が現れる方向別で比較すると,衝突速度や相対軌跡に違いがみられた. 左折時の場合は,事故では四輪車の対面方向から自転車が現れる場合が多いが,ヒヤリハット では四輪車の進行方向と同一方向から自転車が現れる場合が多い.事故の道路環境については死 角がない場合が多いことは右折と同様であったが,左折では,四輪運転者が脇見をしており回避 行動がない割合が多いこと,ヒヤリハットでは発生場所の道路幅員が広いこと等の傾向があった.
15
第2章
事故と衝突余裕時間
第2 章ではドライブレコーダから得られたデータをもとに,衝突余裕時間(TTC)を用いて, 事故とヒヤリハットの違いを検討する. 2.1. 速度時間線図 2.1.1. TTC(Time to Collision) TTC は自車が先行車などの対象物と衝突するまでの時間であり,衝突回避のための運転操作を 行うことのできる衝突余裕時間である.TTC は衝突の可能性を表す指標であり,衝突が予想され る危険状況に適用可能である.さらに,TTC は危険回避のための運転者の反応時間に対する評価 指標として用いることができる.TTC は先進安全運転支援システムの作動基準として利用されて おり,国土交通省の技術指針によると,衝突被害軽減ブレーキシステムなどにおいて自動ブレー キが作動するタイミングは,乗用車でTTC が 1.4 s 以下,大型車で 1.6 s 以下と記述されている. 本研究では,四輪車がその速度で走行した場合に対象物と衝突するまでの時間を TTC とした. TTC は次式によって算出される. 𝑇𝑇𝑇𝑇𝑇𝑇 =𝐷𝐷𝑉𝑉 =𝑑𝑑𝑣𝑣 (2.1) ここで𝐷𝐷, 𝑑𝑑はある時刻における,衝突位置から四輪車,および自転車までの距離,V,𝑣𝑣 は,そ の時刻での四輪車,および自転車の走行速度である. ブレーキ操作に関する四輪車の速度線図の概略は図 2.1 のようになる.運転者から自転車が見え る時刻として,自転車がドライブレコーダの画面に初めて現れた時刻を 𝑡𝑡a,四輪車運転者が制動 を開始した時刻を 𝑡𝑡b とする(図 2.1).時刻 𝑡𝑡a,𝑡𝑡b における 𝑇𝑇𝑇𝑇𝑇𝑇 をそれぞれ 𝑇𝑇𝑇𝑇𝑇𝑇a,𝑇𝑇𝑇𝑇𝑇𝑇b と定 義した.対象が画面に現れた時刻 𝑡𝑡a および運転者が対象を認知した時刻 𝑡𝑡b のそれぞれの時刻 での四輪車と自転車との距離を 𝐷𝐷a,𝐷𝐷b とすると,𝑇𝑇𝑇𝑇𝑇𝑇a,𝑇𝑇𝑇𝑇𝑇𝑇b は次式で与えられる. 𝑇𝑇𝑇𝑇𝑇𝑇a=𝐷𝐷𝑉𝑉a a (2.2) 𝑇𝑇𝑇𝑇𝑇𝑇b =𝐷𝐷𝑉𝑉b b (2.3) ドライブレコーダの画面上に初めて対象となる自転車が現れてから,運転者が制動を開始するま での時間を,ブレーキ反応時間BRT として次のように定義する. 𝐵𝐵𝐵𝐵𝑇𝑇 = 𝑡𝑡b− 𝑡𝑡a (2.4)16
Fig. 2.1 Example of vehicle velocity-time diagram
右左折時の場合,車は向きを考慮して衝突余裕時間TTC を定義する必要がある.そこで四輪車
に対する自転車の速度を 𝑽𝑽𝑅𝑅,距離を 𝐷𝐷𝑅𝑅 とするとき
𝑇𝑇𝑇𝑇𝑇𝑇 =𝑉𝑉 𝐷𝐷𝑅𝑅
𝑅𝑅∙ cos 𝜃𝜃 (2.5)
を用いてTTC を計算した.
Fig. 2.2 Relative distance and velocity between car and cyclist in turn collision
2.1.2. 制動限界 四輪車が等減速度a で停止するとき −𝑉𝑉2= 2(−𝑎𝑎) × 𝐷𝐷 (2.6) となる.TTC=D/V を用いると加速度について 𝑎𝑎 =2 𝑇𝑇𝑇𝑇𝑇𝑇 =𝑉𝑉 2𝐷𝐷𝑉𝑉2 (2.7) が得られる.車両減速度はある値 𝑎𝑎max より大きくなることはなく(たとえば路面の摩擦限界を 超える減速度は発生させることはできない),上式は制動限界を与える.したがって,図2.3 にお いて,斜線で示した範囲では自転車との衝突が発生する. BRT:ブレーキ反応時間 𝑡𝑡a:四輪運転者から自転車が見え始めた時刻 𝑡𝑡b:四輪車運転者が制動開始した時刻 Va: 𝑡𝑡aにおける四輪車速度 Vb: 𝑡𝑡bにおける四輪車速度 Time
𝐷𝐷
𝑉𝑉 𝑑𝑑 𝑣𝑣 Brake ta tb Cyclist visible Brake start 𝐵𝐵𝐵𝐵𝑇𝑇 = 𝑡𝑡b― 𝑡𝑡a Va Vb Ca r ve loc ity V Change pedal RecognitionBrake reaction time
Crash
tc
V
ν
17 Fig. 2.3 制動限界と TTCb, Vbの関係 2.2. 結 果 2.2.1. 出会い頭 図2.4 に四輪車運転者から自転車が見えるようになった時刻 𝑡𝑡a と衝突が発生した時刻 𝑡𝑡c の間 の時間間隔を,四輪車の速度 𝑉𝑉a によって示す.四輪車速度 25 km/h 以下では事故データの 𝑡𝑡a− 𝑡𝑡c がニアミスより大きく,自転車が見えるようになってからの四輪運転者の制動遅れが事故につ ながっていることがわかる.一方,四輪車速度が 25 km/h を超えると,𝑡𝑡a− 𝑡𝑡c は 1.3 s のまわり に分布するようになる.これは自転車速度を12 km/h とすると,時間 1.3 s の間の自転車の移動距 離は 4.3 m であり,これは自転車が道路を横切るときの運転者からの視界の障害物から四輪車ま での横方向距離,すなわち,道路幅に相当している.
Fig. 2.4 time difference of ta-tc for collisions and near-miss incidents
出会い頭事故について式(2.7)から加速度を求め,事故の有無別にプロットすると図 2.5 のよう になる.ここから事故発生確率50%は,車両減速度 0.55G(5.4 m/s2)に相当していることがsわ かる.この減速度より高いヒヤリハットの件数はほとんどなく,0.55G が制動限界になっている. 0 2 4 6 8 10 12 14 16 18 20 0 10 20 30 40 50 60 ta - tc (s ) 四輪車速度Va (km/h) 事故時 ヒヤリハット時 1.3 s 𝑇𝑇𝑇𝑇𝑇𝑇 𝑉𝑉 𝑉𝑉𝑏𝑏= 2𝑎𝑎max∙ 𝑇𝑇𝑇𝑇𝑇𝑇𝑏𝑏 制動限界 𝑉𝑉𝑏𝑏> 2𝑎𝑎max∙ 𝑇𝑇𝑇𝑇𝑇𝑇𝑏𝑏 𝑉𝑉𝑏𝑏< 2𝑎𝑎max∙ 𝑇𝑇𝑇𝑇𝑇𝑇𝑏𝑏 停止可能 停止不可能
18
Fig. 2.5 Logistic regression of probability of accidents vs. deceleration
自転車乗員が画面に現れた時刻での四輪車の速度 𝑉𝑉a と 𝑇𝑇𝑇𝑇𝑇𝑇a の関係を事故とヒヤリハットに 分類して,図2.6 に示す.ここで,図の直線は図 2.3 による制動限界であり,減速度 a=5.4 m/s2で 減速した場合に四輪車が対象に衝突せずに停止するための時間を示している.自転車の 𝑇𝑇𝑇𝑇𝑇𝑇a は 四輪車の速度に関わらず,事故の多くは0~1.0 s 付近の間に存在しているが,𝑇𝑇𝑇𝑇𝑇𝑇 が 2 s 以上の 場合も存在しており 2 種類の事故形態があることがわかる.図の直線より下に存在している事故 がいくつかあり,これは自転車が確認できる時点でブレーキを掛ければ事故は発生しなかったと 考えられる. 四輪車の制動開始時刻での速度 𝑉𝑉b と 𝑇𝑇𝑇𝑇𝑇𝑇b の関係を図 2.7 に示す.ヒヤリハットについては, 自転車乗員が回避した場合を除き,四輪車のみが回避した事例を示した.時刻taからtbに移るに 従い,多くのデータの TTC が減少し,データ点が左に移動し,衝突の危険度が高くなっている. 速度20 km/h 以上を見ると,減速度 a=5.4 m/s2を示す直線でヒヤリハットと事故が分けられてい る. 図 2.8 に同様の関係を四輪車速度と距離の関係で示した.速度が高いほど,停止までに大きな 距離を必要とする.制動限界を超える速度では事故が発生していることを読み取ることができる. 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Pr
ob
ab
ility
of
a
cc
id
en
ts
𝑎𝑎 = 𝑉𝑉
2/2𝐷𝐷 (𝑚/s
2)
𝑎𝑎 = 0.55G 事故 ヒヤリハット19
Fig. 2.6 TTCa vs. Va in intersection collisions
Fig. 2.7 TTCb vs. Vb in intersection collisions
Fig. 2.8 Vb vs. Db in intersection collisions
0 10 20 30 40 50 60 70 80 0 10 20 30 40 50 四輪車速度 𝑉𝑉b (k m /h ) 𝐷𝐷b (m) 事故 ヒヤリハット (四輪車のみが回避) 𝐷𝐷 =2・0.55G𝑉𝑉2 0 10 20 30 40 50 60 70 0 1 2 3 4 5 6 7 C ar v elo cit y 𝑉𝑉a ( km/h ) 𝑇𝑇𝑇𝑇𝑇𝑇a (s) a=5.4 m/s2 Collision Near-miss 0 10 20 30 40 50 60 70 0 1 2 3 4 5 6 7 C ar v elo cit y 𝑉𝑉b ( km/h ) 𝑇𝑇𝑇𝑇𝑇𝑇b (s) a=5.4 m/s2 Collision Near-miss
20 2.2.2. 右左折 右左折では自転車が交差点に侵入した時刻 teとし,その時刻での四輪車の速度 𝑉𝑉e,𝑇𝑇𝑇𝑇𝑇𝑇e の関 係を調べる.図2.9 に示すように,出会い頭の 𝑇𝑇𝑇𝑇𝑇𝑇 と速度の関係では,事故やヒヤリハットが図 の直線より上にあったが,右左折時の場合はほとんどの事例が図の直線より下にある.すなわち, 右左折時の場合は四輪運転者が自転車に気付いて制動操作を行っていれば,衝突回避が可能であ ると考えられる.ここから,右左折では早い段階で対象の接近を検知し,運転者に知らせるシス テムが事故数の削減に有効であると思われる. 自転車が現れる方向で比較すると,四輪車が左折時に自転車が四輪車と同一方向から現れる場 合には四輪車の速度が低く,右折時に自転車が四輪車と同一方向から現れる場合には四輪車の速 度が高い傾向がある.しかし,𝑇𝑇𝑇𝑇𝑇𝑇 の分布には事故とヒヤリハットでは大きな差がなく,事故で はヒヤリハットよりも 𝑇𝑇𝑇𝑇𝑇𝑇 が大きな事故も存在している.
Fig. 2.9 TTCe vs. Ve of turning right/left collision
2.3. 2 章のまとめ 本章ではドライブレコーダを用いて事故とヒヤリハットの比較を行った.出会い頭では四輪運 転者から自転車が見えるようになってから,衝突するまでの時間は1.3 s に近づき,これは自転車 の走行距離4.3 m に相当する.出会い頭では 2 種類の事故が存在した.1 つは四輪運転者が自転車 に気づくのが遅れ,それにともない制動開始も遅れたために事故に至った事故,もう1 つは自転 車が飛び出してきたために四輪運転者が即座に制動を開始しても衝突回避が困難な事故の 2 形態 が存在している.第1 の事故形態では自動ブレーキ,第 2 の事故形態では運転者の死角からの自 転車の接近を知らせるシステムが事故の削減に有効と考えられる. 事故とヒヤリハットの差を明確化するために,四輪車速度V と TTC から求めた車両減速度(𝑎𝑎 = 𝑉𝑉/(2 ∙ 𝑇𝑇𝑇𝑇𝑇𝑇))を変数として,事故発生確率曲線 𝑃𝑃(𝑎𝑎) を求めた.出会い頭事故の発生確率 50%は 車両減速度 0.55G であった.これにより,出会い頭について,事故とヒヤリハットは,四輪車が
21 制動を開始した時点において,四輪車が停止までに減速度が 0.55G 以上必要とする領域に自転車 乗員が入っているかどうかでヒヤリハットと区別される. 右左折時については,TTC は事故とヒヤリハットともに自転車が交差点に進入した時点では衝 突回避可能な時刻域であり,四輪運転者が事前に対象に気付くことができれば事故が回避される と考えられる.
22
第3章
ドライビングシュミレーターを用いた事故再現
本章ではドライブレコーダ映像をもとに,四輪車と自転車の衝突した事故をドライビングシミ ュレーター(DS)によって再現し,被験者の反応,衝突回避挙動を調べた. 3.1. ドライビングシュミレーターの概要 本研究で用いたドライビングシュミレーターはバーチャルリアリティ空間内での運転・車両 走行を模擬したもので,大型スクリーン5 面に 6 軸動揺装置付きコックピットを組み合わせてい る(図3.1).約 240 インチの高輝度高精細な大型ディスプレイで囲まれた空間で視野角 315°を確 保しており,運転者視点位置に合わせた立体視も可能で,物体と物体の重なり具合を現実と同じ ように表示し,奥行き感や距離感を再現している.3 次元で構築された道路や街並みに交通流な どを設定し,実際の自動車と同様のコクピットに乗車してリアルタイムに運転を模擬する.車両 モデルにより現実の車の運動を再現し,視覚・聴覚・体感等によって運転状態をシミュレーショ ンできる.目的に応じて各種シナリオを設定することで,人の飛び出し,周辺車両の制御など多 様な環境を再現することが可能である.Fig. 3.1 Driving simulator
3.2. 実験方法 実際に愛知県内で発生した四輪車対自転車事故をドライビングシミュレータで再現し,被験者 20 名について衝突を回避できるかどうかを調べる 3.2.1. 実験シナリオ 本研究では2 つの出会い頭事故を再現した.出会い頭事故は運転者の反応遅れにより発生する ものと,四輪車の運転者が即座に反応しても回避困難なケースがある.そこで,四輪運転者から 自転車乗員が見えるようになった時刻において,四輪車の運転者の反応次第で回避の可否が確定 すると考えられるTTCaが1.5 s~2 s となるシナリオ A と,自転車乗員が突然飛び出し回避困難で
23 あるTTCaが1 秒未満となるシナリオ B にて実験を行った. 被験者にはこれら 2 つのシナリオが想定内で行われるよう,各シナリオでの目標速度を伝えて 走行させた.各シナリオの条件を表3.1,図 3.2 に示す.TTCaは自転車が現れた時点でそのままの 速度を維持したときの衝突余裕時間である.衝突回避の可否に関係なく,事故が発生する地点を 過ぎた時点で走行終了とする.また,被験者の運転する車両が事故発生地点の手前に設定された チェックポイントを通過した際に,自転車が10 km/h で進行開始するように設定した.
Table. 3.1 Test matrix
Scenario Target velocity TTCa Bicycle velocity
A 45 km/h 1.9 s 10 km/h
B 35 km/h 0.5 s 10 km/h
Fig. 3.2 Course of driving simulator
3.2.2. 被験者 被験者は運転免許を有する20~60 歳代の男性 17 名,および女性 3 名の計 20 名である.年齢分 布を図 3.3 に示す.被験者には各シナリオでの目標速度で走行することと交通ルールに従って道 路を直進することを指示した.CarMaker から速度やハンドル角度等の車両の状態量や位置座標, 4 つのカメラによる実験中の映像を取得する.映像は,車内に搭載されている 3 つのカメラから 運者の視線,車両前方,運転者の足元と車両の右後方からの映像の4 種類がある. なお,本実験は名古屋大学工学研究科倫理部会(受付番号18-18)の承認の下実施し,被験者 には口頭と書面の双方により研究の趣旨等を説明し,書面により本人から直接インフォームドコ ンセントを得ている.
① 四輪車がチェックポイントを通過
自転車が動き出す
② 交差点の死角から自転車が出現(時刻 )
1.5 s < TTCa< 1.9 s①
目標速度 45 km/h①
②
チェック ポイント 速度 10 km/h②
24
Fig. 3.2 Distributions of participant age
3.3. 実験結果 3.3.1. 実験結果の概要 2 つのシナリオの実験結果を図 3.3 に示す.自転車と接触した場合は「衝突」,自転車に気が付 き回避行動をとり,自転車と接触しなかった場合は「回避」とする.図3.3 に示すように,シナリ オA では,回避が 16 名,衝突が 4 名であった.シナリオ A で衝突となった被験者は対向車や速 度メーターに意識が向いていたなどの理由で,自転車が見えるようになってからの反応が遅れて いた.シナリオB では,回避が 5 名,衝突 15 名であり,回避よりも衝突が多かった.シナリオ B で回避となった被験者は通過する交差点ごとに減速し,目標速度よりもおよそ10 km/h 遅い速度 でチェックポイントを通過したため,初期の想定よりもTTC が大きくなった.各シナリオの回避 方法をみると,操舵を行って回避となった被験者は,両シナリオで1 名のみであり,他の回避し た被験者は皆ブレーキ操作による減速のみで衝突回避を行っていた.また,操舵を行いつつ回避 となった被験者は,自転車の走路よりも十分な距離をもって停止しており,操舵は直接的に衝突 回避にはつながっていなかった.
Fig. 3.3 Avoidance maneuvers in Scenario A and B
4 5 1 7 2 1 0 2 4 6 8 20~30 31~40 41~50 51~ 人数 年齢 女性 男性 2 5 9 3 1 0 5 10 15 20 回避 衝突 認知なし 減速+操舵 減速 操舵
シナリオB (TTCa 0.5 s)
シナリオA (TTCa 1.9 s)
15 2 1 2 0 5 10 15 20 回避 衝突 減速+操舵 減速 人 数25 3.3.2. 各変数の分析 各シナリオの衝突回避別に自転車乗員が画面に現れたときにおけるブレーキ反応時間 BRT, TTC,四輪車速度,加速度の平均値および t 検定の結果を図 3.4 に示す.両シナリオにおいて衝突 となった被験者は,回避の被験者よりもBRT の平均値が有意に大きい.また,シナリオ B で回避 となった被験者のBRT の平均値は負となった.回避した被験者は TTCaの平均値が大きく,シナ リオA では TTCa に有意な差は見られなかったが,シナリオ B では TTCa の平均値は衝突した被 験者は回避した被験者の2 倍であった.両シナリオにおいて,回避した被験者の平均速度 Vaは衝 突した被験者よりも小さい.両シナリオにおいて回避した被験者の四輪車加速度 Aa の平均値は 負の値であり,回避した被験者は自転車が出現したとき,アクセルを踏み込んだ状態にはなく, 減速状態にあった.全体として,シナリオA ではブレーキ反応時間 BRT の影響が最も大きく,シ ナリオB では衝突と回避に対して,全ての変数の平均値が有意に異なっていた(p<0.001).
Fig. 3.4 Averages of various parameters in Scenario A and B
ロジスティック回帰分析により,事故発生確率P を次式で近似し,各変数の影響を調べた.独 立な説明変数として,自転車が見えるようになったときのTTCa, ブレーキ反応時間 BRT,四輪車 加速度を選んだ. 標準偏回帰係数を表3.2 に示す.事故発生に最も大きな影響を及ぼしているのは TTCa であった. 車の加速度も偏回帰係数が正となっており,加速度が大きいほど衝突が発生しやすい.年齢につ いては,標準偏回帰係数は負となっており,若年層ほど衝突が発生しやすかったことを示してい る.これは若年層では走行速度が速い傾向がみられたこと,被験者に後期高齢者が含まれなかっ たことによると考えられる. -0.20.0 0.2 0.4 0.6 0.8 1.0 1.2 1 反応時間 BRT (s) 回避 衝突 回避 衝突 シナリオA シナリオB P < 0.001 P < 0.001 0 10 20 30 40 50 60 1 Va (k m /h ) 回避 衝突 回避 衝突 シナリオ A シナリオ B P = 0.018 P < 0.001 0.0 0.5 1.0 1.5 2.0 2.5 1 TTC a (s) A-A 回避 衝突 回避 衝突 シナリオ A シナリオ B P = 0.051 P < 0.001 -1.5 -1.0 -0.5 0.0 0.5 1.0 1.5 1 Aa (m /s 2) 回避 衝突 回避 衝突 シナリオ A シナリオ B P = 0.009 P < 0.001
𝑃𝑃 =
1 + 𝑒𝑒
−(𝛽𝛽0+𝛽𝛽1
1𝑋𝑋1+⋯+𝛽𝛽𝑛𝑛𝑋𝑋𝑛𝑛)26
Table. 3.2 Logistic regression of probability collision occurrence
説明変数 𝑋𝑋𝑛𝑛 標準偏回帰係数 切片 𝛽𝛽0 -1.644 衝突余裕時間(自転車出現時) TTCa 𝛽𝛽1 -8.258 ブレーキ反応時間 BRT 𝛽𝛽2 3.697 四輪車加速度(自転車出現時) Aa 𝛽𝛽3 5.150 年齢 Age 𝛽𝛽4 -1.915 3.4. 3 章のまとめ ドライブレコーダの映像データの事故をもとに,ドライビングシミュレータを用いて自転車が 現れた時点のTTCaが1.5~2 s となるシナリオ A と,回避困難であると考えられる TTCaが1 s 未 満となるシナリオB について再現実験を行った. シナリオA では 20 名中 16 名が事故を回避し,4 名に事故が発生した.シナリオ B では 20 名 中5 名が事故を回避し,15 名に事故が発生した.シナリオ A では,被験者のブレーキ反応時間が 衝突回避に大きな影響を及ぼしていた.シナリオB では被験者のブレーキ反応時間,TTC,ブレ ーキをかけ始めた時の速度および加速度のレベルが全て満たされたときに衝突回避が可能であっ た.シナリオB において衝突を回避した被験者は,衝突が発生するポイントの手前で自転車が見 えるようになるよりも早くアクセルペダルを戻し,目標速度を大きく下回った状態でチェックポ イントを通過したことにより,TTCaが大きくなり,衝突回避が可能となった.また,自転車が見 えるようになった時刻よりも早くアクセルペダルを戻していたことにより,自転車が見えるよう になった時刻からのブレーキ反応時間も小さくなっていた.このようにプロアクティブ(予防的) な運転者は衝突回避能力が高いことが示された.
27
第4章
衝突被害軽減ブレーキの効果検討
4.1. 事故再現方法ドライブレコーダの衝突事故データに対して,PC-Crash Ver.11.1 を用いて事故再現および AEB
の効果の検討を行った.事故再現の手順は次のようになる. ① ドライブレコーダに記録された地図情報をもとに事故地点を特定し,現場の航空写真をスケ ールを合わせてPC-Crash にフィールドとして読み込む.現場の道路環境や建物を PC-Crash のフ ィールド上に定義することで,四輪運転者からの死角を再現することができる. ② 四輪車と自転車が衝突した時刻を基準として時刻を遡り,ドライブレコーダの四輪車の速 度,加速度,映像をもとに地図上で四輪車の軌跡を設定する.そこに,映像から各時刻における 自転車乗員の位置を地図上で特定し,自転車乗員の軌跡を加える. ③ PC-Crash で再現した運転者視線の映像が,ドライブレコーダ映像と同様なことを確認する. ④ 衝撃時の自転車乗員の挙動をマルチボディプログラム Madymo で検証する. 4.2. AEB の仕様とセンサーパラメータ PC-Crash で事故再現を行ったデータに対して,AEB を作動させることで,四輪車と自転車乗員 の衝突状況の変化を見る.図4.1 は,自転車乗員がセンシングエリアに入ってから,四輪車が制動 を開始するまでの時間経緯を示したものである.時間経緯に従い,自転車乗員が四輪車から見て 死角から現れた時刻をtA,自転車乗員がAEB のセンシングエリアに侵入した時刻を t0とする.そ れぞれの時刻における TTC を TTCA, TTC0とする.ただし,tAは自転車が障害物から四輪運転者 から見えるようになった時刻であり,ドライブレコーダで自転車乗員が画像に初めて現れた時の taとは異なる. 図4 に自転車がセンシングエリアに侵入した時刻 t0から停止するまでの四輪車の加速度変化を
示す.センサー検知遅れ時間(Sensor detection Delay Time; SDT)は対象となる自転車乗員がセン
シングエリア内に侵入してから検知するまでの時間である.制動準備時間(Brake Pre-charge Time;
BPT)はブレーキ作動信号後,ブレーキシステムの昇圧に要する時間やパッドとディスク間の隙
間等の制動開始までに要する時間を表す.ここでは,SDT と BPT の和を制動遅れ時間(Delay Time;
DT)とよぶ.減速度増加時間(Brake Boosting Time; BBT)は最大減速度に達する時間を示す.時
刻 t = t0 +SDT でセンシングエリア内に入ったものが自転車乗員であると認識し,この時刻以降 TTC を計算することで,TTC<1.4 s となった時点から BPT 経過後に,四輪車に減速が発生する. 衝突までの時間余裕がない場合には,図4 で ∆t=0 となり,自転車乗員がセンシングエリア内 に侵入してから減速開始までの時間は DT = SDT + BPT となる.速度と減速度の関係を考えると (2.1.1 章参照),減速開始にはさらに DT だけ時間を要するので,TTC と V の関係は次のように 表す.これは四輪車のAEB による制動限界を表している. ) ( 2 a0 TTC DT V = ⋅ ⋅ − (3.1) AEB の作動を出会い頭と右左折事故について適用した(図 4.3).右左折事故では自転車の走行 の向きを,四輪車の走行の向きと同方向と反対方向として,区別した.
28
Fig. 4.1 Field of view of AEB sensor
Fig. 4.2 Time sequence of brake activity in AEB
(a) Perpendicular collision (b) Left and right turn collision
Fig. 4.3 Collision types
𝑎𝑎
max𝑡𝑡
0𝑡𝑡
𝐵𝐵𝑃𝑃𝑇𝑇
𝑆𝐷𝐷𝑇𝑇
𝑗
𝑇𝑇𝑇𝑇𝑇𝑇 < 1.4 s
𝐵𝐵𝐵𝐵𝑇𝑇
∆𝑡𝑡
車両減速度
𝐷𝐷𝑇𝑇 = 𝑆𝐷𝐷𝑇𝑇 + 𝐵𝐵𝑃𝑃𝑇𝑇
Oppositedirection Oppositedirection
Same
direction Samedirection Left turn Right turn
(a) Cyclist appeared
tA, TTCA
(b) Cyclist entered in the sensor area
t0, TTC0
29 4.3. 出会い頭事故 AEB(FOV 50°, DT=0.5 s)を取り付けた場合の出会い頭事故の再現例を図 4.4 に示す.事例1は 見通しの良い交差点における出会い頭事故である.自転車が見えるようになった時刻tAにおける 四輪車と自転車の速度はそれぞれ48.4 km/h, 22.8 km/h, 衝突時刻における速度は 51 km/h, 12 km/h であった.四輪車にAEB を取り付けた場合の事故再現では,自転車が現れた位置(時刻 tA)から 衝突位置に至るまで,センサー視野に連続して自転車が含まれ,四輪車はAEB によって衝突前に 停止した. 事例 2 は歩道から横断歩道を走行する自転車に,四輪車が衝突した出合い頭事故である.時刻 tAにおける四輪車と自転車の速度は24.3 km/h, 15 km/h, 衝突時刻における速度は 12 km/h, 15 km/h であった.四輪車と自転車の走行速度の差がそれほど大きくないことから,両者のなす相対角度 はほぼ一定に保たれ,衝突に至るまで自転車がAEB のセンサー視野の外に位置していた.この結 果,AEB が作動することなく,衝突に至った.
Fig. 4.4 Reconstructions of cars with AEB systems installed in perpendicular collisions: Collision avoided (Case 1) and not avoided (Case 2).
図4.5 に AEB を取り付けた場合の衝突回避について,自転車乗員が現れた時刻 tAにおけるTTCA とその時刻での四輪車速度VAの関係を,AEB の視野角 FOV 別に示す.図中の点線は四輪車が DT (0.5 s)経過後に 0.8 G の減速を行い,対象直前で停止を行うことのできる TTCAとVAの関係で ある.図よりセンサーの FOV は衝突回避に大きな影響を及ぼすことがわかる.AEB を取り付け た状態で事故再現を行った40 件のうち,FOV 50° によって 6 件は衝突回避されたが,さらに 14 件がFOV を 90° に拡大することで衝突が回避された.さらに,4 件は視野角を全方位(360°)と することで衝突回避された.ただし,9 件は FOV 360°で AEB により四輪車は減速したが衝突に至 った.残る7 件は,FOV 360°であっても制動遅れ時間 DT(0.5 s)のためにブレーキの作動開始前 に四輪車が自転車と衝突したことから,AEB によって車両は減速されなかった. Case1 Case2
30
Fig. 4.5 Collision avoidance with TTC and vehicle velocity at the time of cyclist appearance for various AEB sensing FOV and DT 0.5 s in perpendicular collisions.
図4.6 に AEB のパラメータによる衝突発生有無の状況を示す.四輪車対自転車の出会い頭事故 では,FOV を 50° から大きくすることで,AEB 搭載による衝突回避および速度低減に大きな効果 がみられた.しかし,FOV 360°となる理想的な性能の AEB であっても,回避できない事故がある 割合で存在する(17.5%).これらの事故では TTCAが0.9 s 以下となっている.これは,理想的な センサーを搭載した自動運転の四輪車であっても,現在と事故発生条件が同じであれば,全ての 衝突を防ぐことは困難であることを意味している.
Fig. 4.6 The ratio of AEB effectiveness in avoiding collisions in perpendicular collisions
4.4. 右左折事故 右左折事故についてAEB の衝突回避効果を検討した.図 4.7 に AEB(FOV 50°, DT=0.5 s)作動 状態で,右左折事故を再現した2 例を示す.事例 3 は四輪車が右折し、四輪車の反対方向から自 転車が走行した事故である.四輪車と自転車の速度は,時刻tAにおいて14.1 km/h, 15 km/h、衝突 0 10 20 30 40 50 60 70 0 1 2 3 4 5 6 7 8 9 10 Ve hi cle V el oc ity VA (k m /h ) TTCA(s) 𝑉𝑉=2×0.8𝐺×(𝑇𝑇𝑇𝑇𝑇𝑇−0.5) 𝑉𝑉=2×0.8𝐺×𝑇𝑇𝑇𝑇𝑇𝑇 Collision avoided at 50°
Collision velocity reduced at 360° AEB not activated
Collision avoided at 90° Collision avoided at 360° ≥ DT=0.5s DT=0.5s DT=0 s 22.2% 50.8% 82.5% 19.1% 22.2% 17.5% 58.7% 27.0% 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
50° FOV 90° FOV Ideal AEB
Rat
io
Collision avoided Collision not avoided with AEB AEB not activated
31 時には 17 km/h および 15 km/h であった.自転車乗員が車の前面から見た視野角に入り続けてい たのでAEB が作動し,衝突が回避された. 事例4 では四輪車が左折し,自転車が四輪車と同方向から走行した。四輪車と自転車乗員の速 度は,自転車が歩道から道路に入った時刻 tEにおいて,2 km/h,15 km/h、衝突時には 7.1 km/h と 15 km/h した。自転車が四輪車の後方から近づいたので、自転車は常に AEB センサー視野の外側 に位置していた。その結果,四輪車は衝突を回避することができなかった.
(a) Case 3 (b) Case 4
Fig. 4.7 The ratio of AEB effectiveness in avoiding collisions in left/right turn collisions
図4.8 は右左折事故について,3 種類のセンサー視野角 FOV(50°, 90°, 360°)による AEB の衝 突回避の有無を,自転車が道路に侵入した時刻 tEにおける TTCEと車の速度の関係から示したも のでる.四輪車速度は低く30 km/h 未満であった.右左折事故 40 件が再現され,そのうち,20 件 の衝突はFOV 50° で衝突が回避された。センサーFOV を 90° に拡大することで,さらに 9 件の 衝突が回避された。FOV を 360°にすると、加えて衝突 8 件が回避された。FOV 360°回避されなか った衝突は3 件であり,そのうち 2 件は AEB によって速度が減少したが,1 件は AEB が作動し なかった.
Fig. 4.8 Collision avoidance with TTC and vehicle velocity at the time of cyclist appearance for various AEB sensing FOV and DT 0.5 s in left/right turn collisions.
0 10 20 30 40 50 60 70 0 1 2 3 4 5 6 7 8 9 10 Ve hi cle v el oc ity VE (k m /h ) TTCE(s) Collision avoided at 50° Collision avoided at 90° Collision avoided at 360° collision velocity reduced at 360° AEB not activated
𝑉𝑉=2×0.8𝐺×𝑇𝑇𝑇𝑇𝑇𝑇
≥ 𝑉𝑉=2×0.8𝐺×(𝑇𝑇𝑇𝑇𝑇𝑇−0.5)
32
図4.9 に,左折と右折の衝突における AEB の 3 種類の仕様(FOV 50°, DT 0.5 s; (FOV 90°, DT
0.5 s; FOV 360°, DT 0 s)による衝突回避を,自転車乗員の向き別に示す.右折の方が左折よりも, AEB の衝突回避効果が高い.これは右折の方が四輪車から自転車の距離が大きいことによる. 右折,左折ともに自転車が四輪車と同じ方向から四輪車に近づく場合は,衝突回避が困難とな っている.センサーの視野角FOV の拡大は,衝突回避に有効である.理想的な AEB(FOV 360°, DT 0 s)であっても,衝突が回避できなかった事例が右折,左折ともに見られた.これらの事故で は,走行する四輪車が横断歩道を歩道近くに通過するときに,自転車が歩道から道路に入ったこ とで,四輪車が停止することができなかった.これらの衝突を回避するためには,自転車の歩道 での挙動も予測する必要がある.
(a) Right turn (b) Left turn
Fig. 4.9 The ratio of AEB effectiveness in avoiding collisions in left and right turn collisions.
4.5. 4 章のまとめ 本研究ではドライブレコーダの映像を用いて,PC-Crash によって四輪車対自転車の出会い頭事 故の再現を行い,さらに,四輪車にAEB が取り付けられた場合の衝突発生の有無を検証すること で,AEB の効果評価を行った.ドライブレコーダの映像によって,自転車乗員の行動および四輪 車の運動を事故直前まで把握することができ,精度が高く,矛盾のない事故再現が可能となる. AEB が自転車との衝突回避に非常に有効であることが示された.センサー視野角 FOV 拡大に よって,多くの衝突が回避できるようになる.ただし,理想的なAEB(FOV 360°, DT 0 s)であっ ても衝突回避が困難な事故が存在した.それらはTTC が小さなもので,出会い頭では自転車の飛 び出し,右左折では四輪車が歩道近くで横断歩道に走行しているときに歩道から自転車が道路に 侵入するものであった. さらに,事故被害者数をゼロに近づけるためには,車車間通信や路車間通信といった死角を減 らすICT 技術開発,あるいは自転車の行動予測が重要と考えられるが,一方,自転車乗員の交通 ルールに対する教育や,被害軽減のためのヘルメット着用等を進めていくことも重要であると考 える. 3 4 4 6 6 6 1 1 2 2 3 3 1 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
Same Opposite Same Opposite Same Opposite
Rat
io
collision avoided collision not avoided with AEB AEB not activated
FOV 50° DT 0.5 s FOV 90°DT 0.5 s FOV 360°DT 0 s 13 4 15 9 16 1 2 1 1 1 8 2 4 1 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
Same Opposite Same Opposite Same Opposite
Rat
io
collision avoided collision not avoided with AEB AEB not activated
FOV 50°
33
発表論文
【論文(審査あり)】1. Yuqing Zhao, Daisuke Ito, Koji Mizuno, AEB effectiveness evaluation based on car-to-cyclist accident reconstructions using video of drive recorder, Traffic Injury Prevention, 20(1), 100-106, 2019.
2. Daisuke Ito, Kosei Hayakawa, Yuma Kondo, Koji Mizuno, Robert Thomson, Giulio B Piccinini, Naruyuki Hosokawa, Difference between car-to-cyclist crash and near crash in a perpendicular crash configuration based on driving recorder analysis, Accident analysis and prevention, 117 (2018) 1-9.
【講演論文】
1. Yuqing Zhao, Daisuke Ito, Koji Mizuno, Chunyu Kong. AEB effective evaluations by accident reconstructions using videos of drive recorders in perpendicular and turning car-to-cyclist collisions, IRCOBI Conference, Florence, Italy, September, 11-13, 2019 (Best presentation in session).
2. 宮原輝貴, 趙雨晴, 孔春玉, 伊藤大輔, 青木宏文, 水野幸治,ドライビングシミュレータに よる四輪車対自転車の出会い頭事故再現 第 55 回日本交通科学学会学術講演会 2019 年 6 月20 日 3. 水野幸治,歩行者自転車事故予防への取り組み ドライブレコーダ映像を用いた自転車 事故の再現とAEB 効果の検証,日本安全運転医療研究会, 2018 年 1 月 21 日 4. 水野幸治,ドライブレコーダ映像を用いた自転車事故の分析と事故再現,自動車技術会 第9 回トラフィックセイフティ部門委員会, 2018 年 1 月 17 日 5. 近藤由麻,水野幸治,伊藤大輔,細川成之,ドライブレコーダによる自転車事故と歩行者 事故の分析,第53 回日本交通科学学会総会・学術講演会, 2017 年 6 月
6. Kosei Hayakawa, Yuma Kondo, Koji Mizuno, Daisuke Ito, Robert Thomson, Piccinini Giulio, Naruyuki Hosokawa, Comparison of real accident and near miss incident of cyclist collisions based on drive recorder, 自動車技術会春期講演会, 2017 年 5 月
【その他】
1. 水野幸治,伊藤大輔,細川成之,田中良知,今後の道路交通安全対策はいかにあるべきか -映像を用いた事故分析の有用性について-,交通事故総合分析センター懸賞論文優秀 賞, 2017