光学式モーションキャプチャ・システムに よる歯牙切削動作の定量的解析
新潟大学大学院 医歯学総合研究科 口腔生命科学専攻 歯学教育研究開発学分野
佐藤 拓実
2
1. 緒言
信頼される歯科医師の養成は歯科大学歯学部の社会的使命であり,歯学教育モデルコ アカリキュラム1)や歯科医師臨床研修の到達目標2)には,歯科医師に求められる基本的な 臨床能力として,知識・態度・技能領域に関する詳細な内容が掲げられている.これに 対して,現行の歯科臨床教育において,特に技能については診療参加型臨床実習を開始 する前に共用試験OSCEでの確認が行われるのみであり,歯科医師国家試験にも技能試 験は含まれていない.
このような現状は,歯科医師は技術職的要素を多分に含む医療職であること,様々な 材料や機器を適切に扱う能力が求められることに起因しており,技能教育およびその評 価の難しさを表していると考えられる.歯科臨床における技能教育の立ち遅れは臨床実 習のみならず臨床研修の形骸化を招き,今後大きな問題に発展することが懸念される.
診療器具や歯科材料等を効果的に使用する際,重要なポイントの一つとして処置を行 う際の術者のポジショニングや姿勢があげられる.すなわち,これらの手技用件の一つ には,それぞれの処置に適した姿勢を作り,適切な動作を行う事が含まれる.従来,歯 科治療に関係する姿勢や動作については,切削動作と姿勢の関係3,4)やホームポジショ ン5)に関する調査がいくつかなされている.しかしながら,それらの報告は動作全体で はなく,部分的に評価したものが多く,診療動作に関する詳細な分析は含まれていない.
さらには,術者にとってより無理のない姿勢や術者の身体に障害を生じるリスクを検討 している報告がほとんどであり6,7),姿勢と診療技術の巧拙について論じている報告はみ られない.
また,動作を客観的に可視化して指導することは容易ではないため,指導者は学生や 研修歯科医が診療の基本的な手技を模型実習や臨床を繰り返すうちに経験的に会得す るのを待っているのが現状であり,効果的な学修方法は存在しない.一方,技能習得の 第一段階は模倣であることが知られている8).学修者は模倣することによってその技術 に関する知識を獲得し,巧妙化することにより理解を深め,精密化することによって応 用することができるようになる.
そこで本研究は,現在の歯科における技術教育の問題点を解決するために,スポーツ 技能の解析や映画のキャラクターへの動きの投影に利用されている身体動作計測9,10) の手法を用いて,診療動作を定量的に解析することを目的として実施した.技能習得に 必要不可欠であるにも関わらず,客観的に表現することができない動作を定量的に評価 することによって,学修者が模倣した結果を客観的に評価することが可能となり,歯科
3
臨床教育に貢献することができると考える.これまで,医療領域では主に歩行動作に関 するリハビリテーション分野において盛んに研究がなされてきた11).近年歯科分野にお いても,開閉口運動のシミュレーション12),摂食動作13)やブラッシング動作14-16)の解析 などの報告がみられる.また,歯科臨床教育に生かすことを念頭として,三次元動作解 析の手法を用いて浸潤麻酔時の動作解析を行うための計測システムを構築した報告も なされている17).本研究では光学式モーションキャプチャ・システムによってタービン を用いた切削動作の特徴を捉え,定量的に評価することを試みた.
2. 実験方法
2.1 条件
本研究は,新潟大学歯学部倫理委員会の承認(承認番号:25-R22-10-03)を得た後,
すべての被験者に対して実験前に研究内容や主旨,発表に際しては得られたデータから 確実に個人情報を削除すること,実験協力にあたって想定される不利益の有無,いつで も協力を撤回できることなどについて文書および口頭で説明を行い,同意を得た上で行 った.被験動作は,一般歯科診療において最も高頻度に行われる処置の一つであるエア タービンによる切削動作とした.
2.2 動作計測
計測には光学式モーションキャプチャ・システム(VICON,Oxford,イギリス)を 用いた. VICONシステムは,赤外線反射マーカを200万画素の超高画素赤外線高速カ メラ(図1)で認識することにより,それらの3次元的位置を任意に設定した座標系に表 現する(図2).このシステムを歯科治療時の動作解析に応用するために,はじめにいく つかの予備実験を行い(図3),その結果をもとに歯科用チェアユニット(Speceline
EMCIA,(株)モリタ)やマネキン(シンプルマネキンⅡ,(株)ニッシン),赤外線カ
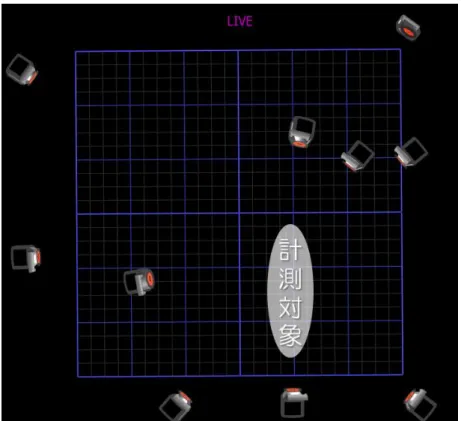
メラの設置位置など各種条件の設定を行った.特に壁や天井に設置した10台の赤外線カ メラの位置は,計測時に室内のすべてのマーカを常時最低2台で捕捉することができる ように調整した.また,赤外線カメラは被験者の動作を妨げることがないように被験者 から1 [m]~5[m] 離れた位置に取り付け,サンプリング周波数は100[Hz]とした.
計測対象となる赤外線反射マーカには直径=9.5[mm]と=6.5[mm]の球形のものを
4
用いた.被験者の身体各所に貼付するとともに被験者との位置を計測するために,実習 用マネキン,エアタービン(ミニタービン,(株)モリタ),チェアユニットにも設置し た.
実習用マネキンの歯科用チェアユニットへの固定は専用の固定器具(ヘッドレストマウ ントSPMⅢ,(株)ニッシン)を用いて行った.被験者はこのような環境下で同一の教 示に従って処置を行った.
動作計測によって得られたデータの分析には3次元空間動作解析ソフト・ウェア
(NEXUS,(株)インターリハ)を用いた.
2.3 分解能の検証実験
一般的なスポーツとは異なり,歯科治療は繊細な静的動作によって行われることが多 いため,今回の条件において最も精密な計測が求められるエアタービンを固定し,チャ ックには先端の位置を示すためのマーカジグを装着して5[s]撮影した.これを5回繰り 返すことによって本システムの分解能を検証した.
2.4 赤外線反射マーカ設置部位
超高画素高速赤外線カメラによって補足する赤外線反射マーカはそれぞれ以下のよ うに設置した.
・ 被験者:
上肢(図4)
胸骨上切痕,第7頸椎棘突起,両側肩峰,剣状突起,第7胸椎棘突起,右側上腕 骨外側上顆,右側上腕骨内側上顆,右側尺骨茎状突起,右側橈骨茎状突起,右 側第3中手骨頭背側.
ヒトの動作解析に関する研究を扱う国際バイオメカニクス学会では,上半身の 動作を計測する際の基準として上記の部位を規定している18,19).
頭部(図5)
頭部には自作のヘッドセットを装着し,球形マーカを4個貼付した可動性フレ ームが被験者のフランクフルト平面と平行になるように調整した.また,被験 者の頭部と対象物との距離を算出するために額当て前方にもマーカを設置し た.
5
・ 歯科用ファントム(図6):
マネキンの下顎に自作のマーカ固定ジグを設置し,赤外線反射マーカ4つを設 置した.
・ エアタービン(図7):
自作のマーカ固定ジグを用いてエアタービン後方部に4つの赤外線反射マーカ を設置した.
・タービン先端マーカジグ(図8):
エアタービン先端のチャックに設置できるよう自作のマーカ固定ジグを用い て後方部に6つの赤外線反射マーカを設置し,それぞれのマーカの経時的な位 置計測を行い,静止時に撮影した.後方マーカジグと先端マーカジグの関係か ら,エアタービンの先端位置を算出した.
・ 3次元デジタイザペン(図9):
切削中のエアタービンの先端位置を算出するために,4つの赤外線反射マーカ を設置したデジタイザペンを用いて計算単位を計測した.
・切削明示用マーカ
切削中とそれ以外の時間を区切るために,チェアユニットに1つの赤外線反射 マーカを設置した.
2.5 切削動作
歯科用チェアユニットの背面は完全水平まで倒し,ヘッドレストは最大まで起こし,
マネキンの顔面が正面を向くように設置した.チェアユニットおよび術者用椅子の高さ は被験者ごとに調整し,診療ポジションは各被験者が9時から11時の間で自由に設定し た.被験者にはエアタービン,ダイヤモンドポイント(ダイヤモンドポイントFG202,
(株)松風)を用いて,実習用マネキンに装着した標準実習用模型(A5A-500,(株)
ニッシン)の下顎右側第一大臼歯にインレー窩洞の形成を行うことを指示した.ダイヤ モンドポイントは被験者毎に新品に交換した.使用する人工歯はあらかじめ開始点とし て遠心小窩にダイヤモンドポイントの切削部の半分2.5[mm]の深さで窩洞を設定し,ラ イトの反射により見づらくなることを防ぐために裂溝を黒のサインペンにて彩色した
(図10).また,実験中の実際の動作を確認することができるように,ビデオカメラを 用いて処置風景を記録した.
6
実験1
被験者は歯科医師群として新潟大学医歯学総合病院勤務の男性歯科医師7名(平均年 齢38.3±5.8歳,臨床経験年数年数5年以上),学生群として臨床実習参加中の新潟大学 歯学部歯学科6年男子学生9名(平均年齢24.6±1.2歳)の合計16名とした.
【手順および教示内容】
窩洞見本の提示 Ⅰ級インレー窩洞を付した人工歯を観察する
練習 未切削の人工歯を切削開始の合図と共に自由に切削させる.その際ポジショニン グやチェアユニットの高さを確認する.また切削中の人工歯の窩洞形態の確認を 行っている間の合図を練習する.
Step1 ダイヤモンドポイントを開始点に挿入し静置する.切削開始の合図とともに切削 を開始する.
Step2 被験者は窩洞形成の終了を確認したところで合図し,バーを静置する.
*切削を止めて窩洞形態を確認する際は,フットペダルから足を離して「確認し ます」と合図をし,補助者が切削明示用マーカを隠し「確認してください」と合 図したのちに窩洞形態の確認を行う.窩洞形成を再開する場合,ダイヤモンドポ イントを窩洞内で静止させ,補助者が「始めてください」と合図したのち切削を 開始する.
Step3 撮影終了の合図で計測を終了し,ダイヤモンドポイントを窩洞から外す.
実験1ではすべての被験者に対して2回ずつ計測を行った.
実験2
新潟大学医歯学総合病院勤務の男性歯科医師8名(平均年齢37.3±6.2歳,臨床経験年 数年数5年以上)を被験者とした.補助者は歯科医師群として新潟大学医歯学総合病院 勤務の男性歯科医師1名(30歳)とした.
実験2は実験1に続けて,フィンガーレストを置かずにStep1-3の通りに実施し,各2 回ずつ計測を行った.バキューム操作を行う補助者は全て同一人物が行った.
3. データ解析 3.1 座標系
座標系には,モーションキャプチャ・システムの基準となるワールド座標系に,エア
7
タービン座標系,タービンヘッド座標系,下顎座標系,咬合面座標系および4つの体幹,
上肢に関する座標系(胸部,肩,肘,手首)(図11)を加えた9つを設定した.各関節や 器具の動作は,立野ら20)の方法に従い,被験者の身体各部ならびにエアタービン,マネ キンに設定したこれらの座標系を組み合わせて評価することによって計測した.
ワールド座標系ΣW=OW-XWYWZW
XYZ軸はそれぞれの座標ごとに異なるが,三次元空間内における物体の姿勢や運動 を計測するために,カメラキャリブレーション時に床面をXY平面とするワールド座 標系を設定した.その原点は床面にテープで印をつけておき,実験毎に概ね一致す るようにした.Z軸は床面に対して垂直に設定した.計測したマーカの位置はすべ てこのワールド座標系で示される.
① タービン座標系∑TR =OTR-XTRYTRZTR
エアタービンに貼付した4点の赤外線反射マーカからタービン座標系∑TR=WTTR・ΣW
を設定した.原点は下部3点の重心とし,重心から前方のマーカに向かう直線をX軸 とした.重心から上方のマーカに向かう直線をZ軸とし,X軸とZ軸の外積をY軸と した.
② タービンヘッド座標系∑TP=OTP-XTPYTPZTP
タービンヘッドに取り付けたジグから計算される座標系∑TP=WTTP・ΣWを設定した.
また,タービンからタービンヘッドのジグを取り外した状態の切削中は,タービン 座標系から計算される.すなわちTRTTP=WTTR-1・WTTPにより座標変換される.
③ 下顎座標系∑L=OL-XLYLZL
マネキンの下顎に設置した4点の赤外線反射マーカとの位置関係を計測することに より,下顎座標系を設定した.
④ 咬合面座標系ΣO=OO-XOYOZO
下顎模型に設置した右下第一大臼歯の頬側近心,頬側遠心,舌側遠心咬頭頂に溝を 掘り,三次元デジタイザペンを用いて位置を計測することにより,咬合面座標系を 設定した.
⑤ 胸部座標系∑T=OT-XTYTZT
胸骨上切痕,剣状突起,第7頸椎棘突起,第7胸椎棘突起上の4点の赤外線反射マーカ との位置関係を計測することにより,胸部座標系を設定した.
⑥ 右上腕座標系∑U=OU-XUYUZU
右側肩峰,右側上腕骨内側上顆,右側上腕骨外側上顆の3点に設置した赤外線反射
8
マーカとの位置関係を計測することにより,右上腕座標系を設定した.
⑦ 右前腕座標系∑F=OF-XFYFZF
右上腕骨内側上顆,右上腕骨外側上顆,右尺骨茎状突起,右橈骨茎状突上の4点に設 置した赤外線反射マーカとの位置関係を計測することにより,右前腕座標系を設定 した.
上記のように設定した座標系に対して図に示すように各パラメータを設定した(図12).
3.2 データの切り出し
計測開始後,ダイヤモンドポイント先端の加速度が最大となった時間を切削開始時点,
加速度が最小になった時間を往路の切削終了時点,この間の時間を計測時間とした.切 削をせず窩洞の確認を行っている間は,確認時間として補助者が切削明示用マーカを隠 し,確認時間のデータは切削時データより取り除いた.
3.3 統計処理
実験 1は歯科医師群,学生群より得られた各種データについて,平均値と変動係数 を算出し,Mann-Whitney U testを用いて有意差の有無を検証した.
実験 2ではフィンガーレストあり群とフィンガーレストなし群で得られたデータの 平均値,変動係数について,Wilcoxon signed rank testを用いて有意差の有無を検証 した.Bell Curve for Excelを用いて行い,有意水準はいずれも5%とした.
4. 結果
データの解析には2回行った計測のうち,欠損が少ない方を用いた.欠損が同程度の 場合は2回目の結果を用いた.解析対象はダイヤモンドポイントについては位置,姿勢 および移動速度,被験者については各関節部の角度および切削対象とした人工歯との距 離とした.また,それぞれの切削動作中のデータの特徴を示す平均値,ばらつきを示す 変動係数について比較検討を行った.以下の値は各群の平均値±1SDを記載した.
9
4.1 本システムの空間分解能
工学的に動作の分析を行う際,空間における対象物について,ベクトルとして解析 するため,パラメータには”位置”と”向き”があり,この”向き”を”姿勢”と表現する.位置 と姿勢の各XYZ軸における値,すなわち6自由度で表現される値をデータとして処理す る.
静止時のダイヤモンドポイントの位置・姿勢を計測し,ひとつのパラメータのデータ の真値に対するRMSE(root mean square error)を分解能の評価とした11).位置の分 解能は,X軸方向で 0.01[mm],Y軸方向で0.01[mm],Z軸方向で0.02[mm]であった.
一方,姿勢の分解能は,X軸周りで 0.01[deg],Y軸周りで0.01[deg],Z軸周り0.02[deg]
であった.この結果より,本システムは対象物の位置・姿勢についてそれぞれ0.1[mm]・
0.1[deg]未満の誤差で計測できることが明らかになった.
4.2.1 実験1におけるダイヤモンドポイントの位置,姿勢,速度
図13に咬合面座標系のXY平面上に各被験者によるダイヤモンドポイント先端の位 置移動の軌跡を重ね合わせて示す.ダイヤモンドポイントの姿勢は咬合平面座標系に対 するタービンヘッド座標系の単位ベクトルEZについて計算し,速度はタービンヘッド座 標系から算出した.XYZ軸周りにおけるダイヤモンドポイントの姿勢の平均値および姿 勢の変動係数について,歯科医師群と学生群の各パラメータに有意差は認められなかっ た(図14,15).ダイヤモンドポイントの移動速度については,平均値に有意差はみら れなかったが(図16),変動係数は歯科医師群1.08±0.28,学生群2.40±3.06であり,
学生群で有意に大きな値を示した(図17).
4.2.2 実験1における各関節の姿勢
肩関節(図18,19)
胸部座標系と右上腕座標系を使用して計測を行った.内転,内旋,水平内転は[+],
外転,外旋,水平外転は[-]の値で示される.肩関節の姿勢に関する計測数値には平均値,
変動係数とも歯科医師群と学生群の間に有意差を認めなかった.
肘関節(図20,21)
右上腕座標系と右前腕座標系を使用して計測を行った.回内,屈曲は[+],回外,伸
10
展は[-]の値で示される.姿勢の平均値については,各パラメータで有意差は認められな かった.変動係数は回内外角についてのみ,歯科医師群-0.12±0.17,学生群0.10±0.32 となり有意差が認められた.
手関節(図22,23)
右前腕座標系と右手部座標系を使用して計測を行った.尺屈,掌屈は[+],橈屈,背 屈はを[-]の値で示される.手関節の姿勢の平均値については,各パラメータで有意差は 認められなかった. 変動係数は尺橈屈において歯科医師群が-0.15±0.93, 学生群は 0.21±0.43であり,有意差が認められた.
4.2.3 実験1における頭部,体幹から被験歯との距離
頭部(ナジオン),頸部(胸骨上切痕),胸部(剣状突起)から被験歯への距離(図24,
25)
胸部から被験歯間までの距離の姿勢に関する平均値は歯科医師群で234.67±53.76 [mm],学生群が320.25±26.26 [mm]となり,有意差を認めた.その他の平均値や変 動係数には有意差は認められなかった.
4.2.4 実験1における各時間
歯科医師群と学生群の比較(図26)
窩洞形成全体に要した時間を示す計測時間は歯科医師群114.25±30.74[sec],学生群 219.21±62.89[sec] ,窩洞の切削に要した切削時間は歯科医師群97.48±17.41[sec],
学生群173.62±49.00[sec], 窩洞形態の確認を行った確認時間は歯科医師群16.77±
13.91 [sec],学生群45.59±19.86[sec]となり,すべてにおいて有意差が認められた.
4.3.1 実験2におけるダイヤモンドバーの位置,速度,姿勢
図27に咬合平面座標系のXY平面上におけるダイヤモンドポイントの位置の軌跡を示 す.ダイヤモンドポイントの姿勢は咬合平面座標系に対するタービンヘッド座標系の単 位ベクトルEZについて計算し,速度はタービンヘッド座標系から算出した.
レストあり群とレストなし群を比較したところ,Z軸回りすなわち咬合平面に対して水 平な回転についてレストあり群0.06±0.05,レストなし群0.04±0.02となり,有意差を認
11
めた.また,移動速度の平均値については,レストあり群4.99±1.29,レストなし群4.13
±1.54,速度の変動係数に関してはレストあり群1.09±0.26,レストなし群1.91±0.64と なり,いずれも有意差が認められた(図28,29).
4.3.2 実験2における各関節の姿勢
肩関節(図32,33)
胸部座標系と右上腕座標系を使用して計測を行った.内転,内旋,水平内転は[+],
外転,外旋,水平外転は[-]の値で示される.肩関節の計測数値には平均値,変動係数と も歯科医師群と学生群の間に有意差を認めなかった.
肘関節(図34,35)
右上腕座標系と右前腕座標系を使用して計測を行った.回内,屈曲は[+],回外,伸 展は[-]の値で示される.肘関節姿勢の平均値のうち,回内外角についてレストあり群は -3.89±3.98[deg],レストなし群は-5.00±4.16 [deg]となり,有意差を認めた.また,
変動係数についても屈曲進展はレストあり群0.09±0.06,レストなし群0.07±0.06とな り,有意差がみられた.
手関節(図36,37)
右前腕座標系と右手部座標系を使用して計測を行った.尺屈,掌屈は[+],橈屈,背 屈はを[-]の値で示される.尺橈屈の平均値について,レストあり群は3.42±9.59[deg],
レストなし群は8.08±5.78[deg]であり,有意差を認めた.変動係数については,各パ ラメータで有意差はみられなかった.
4.3.3 実験2における頭部,体幹から被験歯との距離
頭部(ナジオン),頸部(胸骨上切痕),胸部(剣状突起)から被験歯への距離(図38,
39)
レストあり群とレストなし群の各パラメータにおいて有意差を認めなかった.
4.3.4 実験2における各時間
歯科医師群と学生群の比較(図40)
実験1同様に計測時間,切削時間,確認時間をレストあり群とレストなし群で比較し
12
たところ,切削時間について,レストあり群97.41±16.29[sec],レストなし群118.16
±30.16 [sec]となり,有意差を認めた.
5. 考察
5.1 被験者および解析の対象とした動作
新潟大学歯学部歯学科では最終学年にあたる5年次10月から6年次10月まで臨床実習 を行っており,学生は新潟大学医歯学総合病院歯科において担当医の一人として実地に 歯科医療を学ぶ.臨床実習は歯学部学科目の集大成として位置づけられているため,学 生は臨床現場において,それまでに基礎系・臨床系各学科目で修得した知識・態度・技 術を総合的に評価されることになる12).今回の計測は4月から6月までに実施したため,
学生は半年間の臨床経験があり,経験の浅い歯科医師と想定することに無理はなかった と考えられた.一方,臨床経験5年以上の歯科医師群には学生や研修歯科医のインスト ラクター経験を有する者が含まれており,自らが診療することはもちろん,学生や研修 歯科医に対する教育を実践していた.したがって,言葉や図では説明しきれない技能習 得のポイントを解明するために適した被験者であったと思われた.ただし,今回は被験 者数が限られていたため,本研究の結果の妥当性を検証するためにはさらなる調査が必 要になると思われた.
5.2 結果の解釈
結果について,平均値とは動作計測中における姿勢の平均値を示す.切削動作は静的 な動作であることから,平均値は動作中に採る典型的な姿勢を表すと解釈した.また,
変動係数とは動作計測中における姿勢の標準偏差を平均値で除した値である.このため 変動係数は動作中の姿勢の変化量を示すと解釈した.
本研究を開始するに当たり,動作計測の精度検証と実験条件の設定のために以下のよ うな予備実験を行った.
13
5.3.1 予備実験1:机上に固定した石膏の切削動作解析.
方法:図形を描記した石膏に対し,被験者がエアタービン,ダイヤモンドポイント を用いてその図形通り切削するよう指示し,その際の頭部,右側上肢,エアタービンの 動作を解析した.図形は直線型,曲線型,直線・曲線複合型の三種類とし,試行回数は 各3回ずつとした(図41).被験者は本院所属の歯科医師10名と本学臨床実習中の学生 10名とした.
結果と考察:ダイヤモンドポイント先端の軌跡から歯科医師群のほうが学生群よりエ アタービン操作の精確性が高かった(図42,43,44).エアタービンの向きは歯科医師群 のほうが学生群より体幹の正面に対して平行に位置し,ダイヤモンドポイントの変動係 数も小さく,切削中の肘,手首の変動係数も小さな値を示した.一方,頭部や頚部と石 膏の距離は歯科医師群のほうが学生群より遠かった.以上のことから歯科医師群はエア タービンのコントロールを主に指で行い,肘,手首の屈曲は小さく保ち,関節に無理な 力がかからない姿勢で行っているのに対し,学生群は指だけでなく手首や肘も使ってエ アタービンをコントロールしていることが示唆された.
また,歯科医師群は切削する図形によって,エアタービンと肘の角度の平均値に変化 が認められたが学生にその傾向はみられず,切削する対象によってコントロールしやす いように姿勢を変化させていると考えられた.さらに,学生群においては図形がダイヤ モンドポイントや各関節の変動係数に与える影響が大きいことが示された.
5.3.2 予備実験2: マネキンに装着した右下第一大臼歯の人工歯Ⅰ
級インレー窩洞形成の動作解析.
方法:上述した本実験と同様の環境下で,本院所属の歯科医師1名にマネキンに装着 した右下第一大臼歯の人工歯のI級インレー窩洞形成の実施を指示した.試行回数は1 日4回を4日間で計16回とした.
結果と考察:ダイヤモンドポイントの姿勢は,同日内において回数を増すごとに咬合 平面に対して垂直に近づいた.また,日数を重ねる毎に同様の傾向が認められた.一方 で切削時の姿勢は同日内ではほぼ一定であり,日が異なると変化する傾向が認められた.
以上から動作には学習効果があること,同一人物,同一動作であっても診療姿勢の再 現性はそれほど高くないことが示された.
14
5.4.1 エアタービン,ダイヤモンドポイントの動作(実験1)
ダイヤモンドポイントの先端の軌跡の形態から,歯科医師群はⅠ級インレー窩洞の形 態が概ねイメージでき,そのイメージに合わせてダイヤモンドポイントをコントロール していると考えられた.学生群においても適切な形態に切削できた被験者が認められた が,そうではない場合も多いことが示された.
ダイヤモンドポイントのZ軸周りの姿勢については,平均値では歯科医師群のほうが学 生群よりばらつきが小さく,変動係数も小さい値をとる傾向がみられた.これは歯科医 師群では近心側の歯牙,多くは前歯部にフィンガーレストを置き,その姿勢を維持する ことで,ダイヤモンドポイントを無理なく咬合平面に並行に動かしていることを示して いると考えられた.学生群は小臼歯や犬歯にフィンガーレストを置く者も認められ,こ れが指,手首に無理を生じさせ,ダイヤモンドポイントのZ軸周りの姿勢をばらつかせ ていると思われた.
一方,ダイヤモンドポイントのX,Y軸周りの姿勢の平均値については有意差を認めな かったが,歯科医師群のほうが学生群より小さい値を示す傾向が認められた.本システ ムでは右下第一大臼歯の近遠心頬側咬頭と遠心舌側咬頭の三点から仮想咬合平面(以下,
仮想平面)を設定し,各被験者は歯列や歯軸から各々に咬合平面(以下,被験者平面)
を想定したと考えられるが,両者が一致しなかった場合,X,Y軸周りの姿勢の平均値 は適正範囲から外れる可能性がある.したがって,歯科医師群は学生群に比べてダイヤ モンドポイントの姿勢を維持・安定させることができており,エアタービンをより高い 精度でコントロールしていることが示唆された.
5.4.2 被験者の上肢・体幹の動作(実験1)
被験者の肩,肘,手首の姿勢の平均値では有意差を認めなかった.予備実験において,
各関節を無理なく固定することにより,エアタービンのコントロールの精確性が増すこ とが示唆された.具体的には“肩は大きく外転させない,肘はあまり回内外させない,
手首は曲げない ”ことがポイントとして挙げられた.本実験の結果から,今の被験者 は上記の姿勢を概ね習得できていたように思われた.
変動係数については,肘の回内外,手首の尺橈屈について有意差を認め,その値は歯 科医師群のほうが小さかった.予備実験の結果同様,このことは歯科医師群では肘や手
15
首を動かさず,主に指でエアタービンをコントロールしているのに対し,学生群は指だ けでなく肘や手首も稼働させていることを示しているようと考えられた.
被験者の頭部,頚部,胸部から切削対象とした人工歯までの距離の平均値は,胸部に おいて有意差を認め,歯科医師群の方が学生群より小さかった.変動係数についても有 意差はみられなかったものの,歯科医師群の値は小さかった.これは歯科医師群に比べ,
学生群が頭を前に曲げ,より覗き込んでいるような姿勢を採り,動作中はその位置関係 を維持していることを示していると思われた.
5.4.3 切削動作の時間(実験1)
動作時間については,計測時間,切削時間,確認時間すべてにおいて有意差を認め,
歯科医師群のほうが学生群より短時間であった.切削時間の短縮は切削片の飛散減少や 患者に与えるストレスの軽減につながる.当然のことながら,学生群において切削時間 が長かったことはエアタービンの操作や各種確認に時間を必要としていること,窩洞の 概形のイメージが明確化していないことが原因と考えられた.
5.5.1 エアタービン,ダイヤモンドポイントの動作(実験 2 )
ダイヤモンドポイント先端の軌跡や被験者が形成した窩洞には,レストあり群とレス トなし群のそれぞれを特徴づけることができる明らかな違いは認めなかった.
ダイヤモンドポイントの姿勢については,平均値では有意差を認めず,変動係数ではZ 軸回りの姿勢について有意差を認めた.しかし,X軸回りの姿勢の平均値ではレストな し群の方がレストあり群よりやや大きな値を示しており,ダイヤモンドポイントの姿勢 が咬合平面に対して頬側または舌側に傾斜する傾向があると考えられた.また,Z軸回 りの変動係数について,レストなし群の方がレストあり群より小さい値を示したことは,
被験者が代替的な身体動作を行ったことやフィンガーレストによりエアタービンの持 ち手部分が固定されていなかったことが影響していると思われた.
ダイヤモンドポインの速度については,平均値,変動係数共に有意差を認め,レスト なし群がレストあり群に比べて平均速度が遅く,変動係数が大きくなった.これにはエ アタービン動作の支点であったフィンガーレストを喪失したことにより,ダイヤモンド ポイントが支点となり,切削圧を上手く伝達できなくなったことに加え,支点が常に回 転切削運動を行っているため容易に安定させられなかったことが関係していると考え
16
られた.動作中の速度変化は,主としてバーの滑走や逸脱等アクシデント的な動きが多 く発生したことに起因していると思われた.以上の結果からフィンガーレストがない場 合,エアタービンのコントロールの安定性は明らかに低下すると考えられた.
5.5.2 被験者の上肢・体幹の動作(実験2)
肩,肘,手首の関節の姿勢について,平均値では肘の回内外,手首の尺撓屈で有意差 を認め,変動係数では肘の屈曲伸展で有意差を認めた.動作中の平均的な姿勢について は,レストあり群の方がレストなし群より回内,撓屈しており,フィンガーレストがな い場合は上述のように姿勢を変化させることによって,可及的にエアタービンの安定性 を確保しようとしていたと考えられた.変動係数は,肘の屈曲伸展についてレストあり 群の方が,レストなし群に比べて小さな値を示した.すなわち,フィンガーレストがあ る場合,エアタービンのコントロールは主に指でなされているのに対し,フィンガーレ ストがない場合には指に加え,肘の屈曲伸展によってエアータービンをコントロールし ていたと思われた.
頭,頚,胸から被験歯までの距離については平均値,変動係数ともに有意差を認めず,
フィンガーレストの有無はこれらの姿勢に影響を与えないことが示された.
5.5.3 切削動作の時間(実験 2 )
動作計測中の時間については切削時間のみに有意差が認められ,レストなし群の方が レストあり群より大きくなる傾向が認められた.これはエアタービンのコントロールが 低下したことにより,目指す窩洞形態まで切削するのに時間がかかったことを示してい ると考えられた.
6. 実験 1,2 のまとめ
今回の結果は予備実験により予想された結果から大きく逸脱するものではなかった.
エアタービンを用いた歯牙切削動作では,上肢の各関節を無理のない姿勢に保ち,フィ ンガーレストによりエアタービンの安定性を確保することで,ダイヤモンドポイントを 的確に動かすことができ,目標とする窩洞形態を達成することが可能となる.そしてこ れにより切削している時間を延長することなく,患者のストレスを軽減することができ
17 る.
実験1,2からフィンガーレストを置かずに各関節や指でのコントロールでエアタービ
ンを安定させようと試みた場合,一見似たような動作ができているように見えても,そ のコントロールの主体は変化し,安定性も低下することが明らかになった.さらにはダ イヤモンドポイントの逸脱などの危険性も増加するため,フィンガーレストはエアター ビンに限らず,各種インスツルメントを操作するときには欠かせないことが示された.
このような診療時の基本姿勢は歯科医師が経験を重ね,試行錯誤することで自分に合 った診療姿勢にカスタマイズしていると予想されるが,学生は経験に乏しいだけではな く,科学的根拠を伴う説明や例示を基に診療姿勢について学修する機会がないため,姿 勢に無理が生じ,切削中に本来動かすべきではない部位を動かしていると結論づけるこ とができると考えられた.
7. 今後の展望
超高齢化社会を迎えた我国では,今後益々訪問・在宅診療の需要が増加すると思わ れるが,診療室に比べると大きく制限される診療環境において適切な治療を行うために は,通常の診療環境で確実に治療を行う事ができる技能を習得しておく必要がある.こ のため,学修者が歯科治療技能を効果的に修得するための新たな方法の開発,充実は喫 緊の課題と思われる.
従来,歯科臨床技能教育を効果的に行うための教材開発に関する研究はいくつかみ られる21,22).歯科用のマネキンは1904年にリッチモンド医歯薬科大学歯学部の保存実 習で初めて用いられたと報告23)されており,学習者が治療技術を習得するために各種歯 科疾患を再現した模型とともに,その後もさまざまな改良がなされてきた24,25).近年 ではヒト型患者ロボット26,27)や従来用いられてきたそれぞれの歯科専門領域に合わせ て専用設計されたものではなく,いくつかの専門領域に関わる疾患を再現した複合型模 型28)を利用する試みがなされている.テクノロジーの急速な進化がみられる昨今,近い 将来,特にバーチャル・リアリティを利用した治療トレーニング機器29-31)の普及はさら に拡大する可能性があると思われる.一方,学修者の技能向上に直接的に寄与する教材 としては,主に教書や各種ガイドブック等に代表される書物が用いられてきた.実際の 治療やデモンストレーションを記録した動画の利用も行われており,治療のステップご とに動画教材を整理したライブラリを構築した例もみられる32).学修者にとって,確認 したい箇所を繰り返して再生することができる動画は非常に有用であり,それらのなか
18
でも術者の視点で一連の処置を記録した動画には一定の教育効果が認められることが 報告されている33).さらには,治療時に術者が患者に加える力に関する調査も行われて おり,臨床経験の浅い学生や研修歯科医は必要時に必要なだけの力を加えられていない ことが示されている22,25).治療時に患歯あるいは患部に加える力も可視化することが できないため,指導者にとっては教示が難しく,学修者にとっては容易に理解すること ができない要素であると考えられる.
本システムにより,これまで定量的に扱うことができなかった診療動作を解析し,
客観的に評価できることが示された.今後は部位や手技,扱うインスツルメント等を増 やして基礎的なデータを集めることが必要と考える.また姿勢の評価だけでなく,その 診療結果についても定量的評価を行うことが重要と思われる.今回の実験に関しては被 験者によって形成された窩洞が診療結果に相当するが,これまで窩洞形態は主観的に評 価されることが多く,必ずしも定量的であるとはいえなかった.しかし,光学スキャナ の発展により,窩洞や歯を3次元データに変換して解析することが可能になったため,
いずれ定量的に窩洞形成の評価を行うことが一般化すると思われる.本研究を継続する に当たり,客観的な評価体制の確立に関する周囲の動向には大いに注目したいと考える.
歯科治療に関して従来可視化されることがなかった要素を定量化し,評価すること によって歯科診療全体の適切化や効率化に貢献することができると考えられる.さらに,
それらの結果に基づく教育体制を確立することによって,歯科医師の完成に要する時間 を短縮することが可能になると思われる.今後も本システムによる計測を継続するとと もに,他のシステムの開発も進め,歯科診療技能取得に隠されているポイントを多角的 に捉え,客観化,可視化したいと考えている.
謝辞
本研究を進めるにあたり,多大なる御指導・ご鞭撻をいただいた新潟大学大学院医 歯学総合研究科 藤井規孝教授に深く感謝申し上げます.また,共同研究において,多 岐に渡り御指導,御協力くださった新潟大学大学院自然科学研究科 林豊彦教授,立野 裕洋氏に心から御礼申し上げます.
19
参考文献
1. 文部科学省.歯学教育モデルコアカリキュラム(平成28年度改訂版).
http://www.mext.go.jp/b_menu/shingi/chousa/koutou/0322/gijiroku/__icsFiles/afieldfile/20 17/03/13/1382693_001.pdf (最終閲覧日:2019年1月10日)
2. 厚生労働省.歯科医師臨床研修の到達目標.
http://www.mhlw.go.jp/topics/bukyoku/isei/shikarinsyo/gaiyou/kanren/sekou/toutatsu.html
(最終閲覧日:2019年1月10日)
3. 古田 喜博ほか,『診療姿勢が支台歯形成面形態に及ぼす影響について : 非解剖学 的人工歯ブリッジ』日本補綴歯科学会誌,Vol33,No2,pp.359-368,1989
4. 添田 廣,『窩洞形成のシステム化のための人間工学的研究』,日本歯科保存学雑誌 Vol26,pp.78-102,1983
5. 井上 正義,『歯科診療時の基本姿勢 人間工学』, The Japanese journal of ergonomics , Vol45,No3,pp.157-162,2009
6. Hyun-Suk Park, Jin kim, “Analysis of the risk factors of musculoskeletal disease among dentists induced by work posture”, Journal of Phys Ther Sci, Vol27, No12, 2015
7. Daniela Ohlendorf, Christina Erbe, “Constrained posture in dentistry – a kinematic analysis of dentists”, BMC Musculoskeletal Disorders,
8. Bl oo m, B . S. , Hast i n gs, J . T., & Madaus, G. F. “Handb ook on f orm at i ve and summat i ve ev al uat i on of st udent l earni ng. “AcGraw-Hill.1971
9. 田中 洋,林 豊彦ほか,『投球動作におけるステップ足接地の肘下がりは動力学的 パラメータに影響するか?』,日本整形外科スポーツ医学会雑誌,Vol37,No2,
pp.46-52,2017
10. Kwon Jung, Won Son Sung Min, Lee Na Kyung “Changes of kinematic parameters of lower extremities with gait speed: a 3D motion analysis study “Journal of Physical Therapy Science ,Vol27,No2,pp.477-479,2015
11. 瀧上秀威,腰野富久,”3 次元動作解析装置 VICON を用いた内側型変形性膝関節 症 患 者 の 膝 の 歩 行 時 側 方 動 揺”, 日 本 臨 床 バ イ オ メ カ ニ ク ス 学 会 誌, Vol17, pp.213-217, 1996
12. Oli ver Rohrle, J. Neil Waddell, “Using a Motion-Capture System to Record Dynamic Articulation for Application in CAD/CAM Software”, Journal of Prosthodontics, Vol18, pp.703-710, 2009
13. Nozomi Murakami1, Yuki Nakamura,” Oral feeding behavior during a whole meal”, dent oral craniofac, vol4(1), pp.2-7, 2017
20
14. Emi Inada, Issei Saitoh, etc, “Quantitative evaluation of toothbrush and arm-joint motion during tooth brushing”, Clin Oral Invest, Vol19, pp.1451-1462, 2015
15. Yuki Tosaka, Kuniko Nakakura-Ohshima, “Analysis of tooth brushing cycles”, Clin Oral Invest, Vol18, pp2045-2053, 2014
16. Kee-Deog Kim, Jin-Sun Jeong, “Efficacy of computer-assisted, 3D motion-capture toothbrushing instruction”, Clin Oral Invest, Vol19, pp1389-1394, 2015
17. 中村太,『光学式モーションキャプチャ・システムによる歯科診療動作の定量的解 析』,*博士論文.投稿準備中 .
18. G. Wu, S. Siegler, P. Allard, C. Kirtley,A. Leardini, D. Rosenbaum, M. Whittle, D.D.
D'Lima,L. Cristofolini,H. Witte,O. Schmid,I. Stokes, “ISB recommendation on definitions of joint coordinate system of various joints for the reporting of human joint motion–PartI: ankle, hip, and spine, “Journal of Biomechanics, Vol.35, pp.543-548, 2002.
19. G. Wu, F.C.T. van der Helm, H.E.J. Veeger, M. Makhsous, P.V. Roy, C. Anglin, J. Nagels, A.R. Karduna, K. McQuade, X. Wang, F.W. Werner,B. Buchholz, “ISB recommendation on definitions of joint coordinate systems of various joints for the reporting of human joint motion–PartII: shoulder, elbow, wrist and hand”, Journal of Biomechanics, Vol.38, pp.981-992, 2005.
20. 立野 裕洋,林 豊彦,『光学式モーションキャプチャ・システムを用いた歯学教 育のための切削動作解析』,電子情報通信学会技術研究報告(ME とバイオサイバ ネティックス),Vol117,No63,pp.33-38
21. 奥村 暢旦,石崎 裕子ほか,『歯科臨床技術教育における動画教材の効果』,日本歯 科医学教育学会雑誌,Vol31,No1,pp.10-15,2016
22. 中村 太,佐藤 拓実ほか,『高頻度歯科治療における処置時の力のコントロールに 関する研究』,日本歯科医学教育学会雑誌,Vol32,No1,pp.22-28,2016 23. 森山 徳長,『1904年リッチモンド医歯薬科大歯学部保存実習で始めて用いられたラ
イト式マネキンについて』,日本歯科医史学会会誌,Vol15,No3,pp.219-223,1988 24. 里田 隆博ほか,『嚥下機能模型の製作(解説)』,解剖学雑誌,Vol83,No2,pp.51-57,
2008
25. 佐藤 拓実,中村 太ほか,『研修歯科医の臨床技術習得における力のコントロール に関する研究』,日本歯科医学教育学会雑誌,Vol32,No3,pp.166-172,2016 26. 秋山 仁志,宇塚 聡ほか,『ヒト型患者ロボットシミュレーションシステム
(SIMROID)を用いた補綴歯科研修』,日本歯科医学教育学会雑誌Vol29,No1,
pp.11-20,2013
21
27. 間所 睦,宮崎 芳和ほか,『歯科臨床教育用患者ロボットの開発による教育・評価シ ステム』,日本歯科医学教育学会雑誌,Vol23,No1,pp.24-32,2007
28. 秋葉奈美,長澤麻沙子ほか,『新潟大学歯学部における統合型模型実習の取り組み』,
日本歯科医学教育学会雑誌Vol33,No2,pp.106-114,2017
29. Ozaki Masao, Downes Micheal S., Baba Atsuko, Yanagita Kenichi, Kashiwamura Hariko
“Development of a Virtual Reality Force Feedback-Enabled Dental Drill Training Simulation”, Biomedical Soft Computing and Human Sciences, Vol.18, No2, pp.49-55, 2013.
30. Cléber Gimenez CORRÊA, Maria Aparecida de Andrade, “Virtual Reality simulator for dental anesthesia training in the inferior alveolar nerve block”, Journal of Applied Deal Scence, Vol25, No4, pp357-366, 2017
31. Dangxiao Wanga, Siming Zhao, “Preliminary evaluation of a virtual reality dental simulation system on drilling operation”, Bio-Medical Materials and Engineering, Vol26, pp.S747-S756, 2015
32. 高 真紀子,茂木 瑞穂ほか,『小児歯科学模型実習におけるe-learning(WebCT)導 入に対する評価』,小児歯科学雑誌,Vol49,No2,pp.155-164.2011
33. 田口 裕哉,滝沢 智子ほか,『全部鋳造冠支台歯形成の技術教育と客観的評価に関す る新たな試み』,日本補綴歯科学会誌,Vol4,No4,pp.434-443,2012
22
図1:モーションキャプチャカメラと赤外線反射マーカ
23
図2:実験室内のカメラ配置
図3.予備実験における石膏模型の切削
24
図4:上肢体幹のマーカ貼付位置
図5:マーカを貼付したヘッドセット
25
図6:ユニットに固定したマネキンと貼付したマーカ
図7:マーカを貼付したエアタービン
26
図8:タービン先端に装着するマーカジグ
図9:3次元デジタイザペン
27 図10.被験歯
図11:上肢の座標系
28
図12.各パラメータの解釈
29
図13.ダイヤモンドポイントの先端の軌跡,各群の被験者の重ねあわせ
歯科医師 学生
30
図14 ダイヤモンドポイントの姿勢の平均値(deg)
図15 ダイヤモンドポイント姿勢の変動係数
回転軸 パラメータ 歯科医師 学生 P値
X 舌側(+)頬側(-) 2.29±7.97 -0.02±9.18 0.78 Y 近心(+)遠心(-) 2.84±4.21 3.06±3.78 0.84 Z 右回り(+)左回り(-) 50.66±20.36 61.29±27.31 0.97
回転軸 パラメータ 歯科医師 学生 P値
X 舌側(+)頬側(-) -3.27±8.94 -0.18±0.49 0.68 Y 近心(+)遠心(-) 0.36±0.69 2.78±7.55 0.68 Z 右回り(+)左回り(-) 0.06±0.05 0.04±0.02 0.14
31
速度 歯科医師 学生 P値
平均速度 4.78±1.24 5.61±1.28 0.35
速度 歯科医師 学生 P値
変動係数 1.08±0.28 2.40±3.06 0.03
図16.ダイヤモンドポイントの速度の平均値(mm/s)
図17 ダイヤモンドポイント移動速度の変動係数
*
32
図18 肩関節姿勢の平均値(deg)
図19 肩関節姿勢の変動係数
関節 パラメータ 歯科医師 学生 P値
内転(+)外転(-) -31.38±15.92 -19.33±14.11 0.50 内旋(+)外旋(-) -10.19±22.09 -3.09±22.53 0.40
水平内転(+) 0.21 水平外転(-) 肩関節
32.09±23.82 34.36±32.50
関節 パラメータ 歯科医師 学生 P値
内転(+)外転(-) -0.09±0.09 -0.12±0.13 0.68 内旋(+)外旋(-) -0.31±0.29 -0.41±0.55 1.00
0.09±0.14 0.09±0.10 0.54 肩関節 水平内転(+)
水平外転(-)
33
図20 肘関節姿勢の平均値(deg)
図21 肘関節姿勢の変動係数
関節 パラメータ レストあり レストなし P値
回内(+)回外(-) -4.61±4.27 -4.93±8.75 0.97 屈曲(+)伸展(-) 30.97±14.09 24.55±9.80 0.40 肘関節
関節 パラメータ レストあり レストなし P値
回内(+)回外(-) -0.12±0.17 0.10±0.32 0.05 屈曲(+)伸展(-) 0.29±0.58 0.16±0.10 0.11 肘関節
*
34
図22 手関節姿勢の平均値(deg)
図23 手関節姿勢の変動係数
関節 パラメータ レストあり レストなし P値
尺屈(+)撓屈(-) 2.74±9.25 6.39±13.54 0.72 掌屈(+)背屈(-) 0.08±1.41 -0.85±2.06 0.45 手関節
関節 パラメータ レストあり レストなし P値
尺屈(+)撓屈(-) -0.15±0.93 0.21±0.43 0.04 掌屈(+)背屈(-) 1.24±3.94 -0.26±0.79 0.14 手関節
*
35
図24 頭,頚,胸部から被験歯までの距離の姿勢に関する平均値(mm)
図25 頭,頚,胸部から被験歯までの距離の姿勢に関する変動係数
距離 歯科医師 学生 P値
頭部-被験歯 290.15±65.82 265.70±143.41 0.36 頚部-被験歯 292.21±58.15 354.69±27.76 0.09 胸部-被験歯 234.67±53.76 320.25±26.26 0.02
距離 歯科医師 学生 P値
頭部-被験歯 0.05±0.03 0.15±0.24 0.17 頚部-被験歯 0.15±0.30 0.05±0.05 1.00 胸部-被験歯 0.04±0.04 0.04±0.04 0.54
*
36
図26 実験1における計測時間,切削時間,確認時間の比較(sec)
時間 歯科医師 学生 P値
確認時間 114.25±30.74 219.21±62.89 0.00
切削時間 97.48±17.41 173.62±49.00 0.00
確認時間 16.77±13.91 45.59±19.86 0.01
* *
*
37
図27.ダイヤモンドポイント先端の軌跡の重ね合わせ
レストあり レストなし
38
図28 ダイヤモンドポイントの姿勢の平均値(deg)
図29 ダイヤモンドポイントの姿勢の変動係数
回転軸 パラメータ レストあり レストなし P値
X 舌側(+)頬側(-) 2.29±7.97 -0.02±9.18 0.40 Y 近心(+)遠心(-) 2.84±4.21 3.06±3.78 0.89 Z 右回り(+)左回り(-) 50.66±20.36 61.29±27.31 0.33
回転軸 パラメータ レストあり レストなし P値
X 舌側(+)頬側(-) -3.27±8.94 -0.18±0.49 0.58 Y 近心(+)遠心(-) 0.36±0.69 2.78±7.55 0.26 Z 右回り(+)左回り(-) 0.06±0.05 0.04±0.02 0.03
レストあり レストなし レストあり レストなし レストあり レストなし
レストあり レストなし レストあり レストなし レストあり レストなし
*
39
速度 レストあり レストなし P値
平均速度 4.99±1.29 4.13±1.54 0.03
速度 レストあり レストなし P値
変動係数 1.09±0.26 1.91±0.64 0.04
図30 ダイヤモンドポイント移動速度の平均値(mm/s)
図31 ダイヤモンドポイント移動速度の変動係数
レストあり レストなし
レストあり レストなし
*
*
40
図32 肩関節姿勢の平均値(deg)
図33 肩関節姿勢の変動係数
関節 パラメータ レストあり レストなし P値
内転(+)外転(-) -31.38±15.92 -19.33±14.11 0.07 内旋(+)外旋(-) -10.19±22.09 -3.09±22.53 0.48
32.09±23.82 34.36±32.50 0.67 肩関節 水平内転(+)
水平外転(-)
関節 パラメータ レストあり レストなし P値
内転(+)外転(-) -0.07±0.06 -0.11±0.08 0.26 内旋(+)外旋(-) -0.27±0.28 0.14±0.28 1.00
0.05±0.08 -0.11±0.67 0.12 肩関節 水平内転(+)
水平外転(-)
レストあり レストなし レストあり レストなし レストあり レストなし
レストあり レストなし レストあり レストなし レストあり レストなし
41
図34 肘関節姿勢の平均値(deg)
図35 肘関節姿勢の変動係数
関節 パラメータ レストあり レストなし P値
回内(+)回外(-) -3.89±3.98 -5.00±4.16 0.05 屈曲(+)伸展(-) 32.98±13.67 42.06±17.13 0.16 肘関節
関節 パラメータ レストあり レストなし P値
回内(+)回外(-) -0.07±0.09 -0.05±0.17 0.40 屈曲(+)伸展(-) 0.09±0.06 0.07±0.06 0.03 肘関節
レストあり レストなし レストあり レストなし
レストあり レストなし レストあり レストなし
*
*
42
図36 手関節姿勢の平均値(deg)
図37 手関節姿勢の変動係数
関節 パラメータ レストあり レストなし P値
尺屈(+)撓屈(-) 3.42±9.59 8.08±5.78 0.03 掌屈(+)背屈(-) 0.06±1.49 0.09±1.40 0.67 手関節
関節 パラメータ レストあり レストなし P値
尺屈(+)撓屈(-) 0.15±0.38 0.59±1.09 1.00 掌屈(+)背屈(-) -0.15±0.33 0.79±1.67 0.26 手関節
レストあり レストなし レストあり レストなし
レストあり レストなし レストあり レストなし
*
43
図38 頭,頚,胸部から被験歯までの距離の姿勢に関する平均値(mm)
図39 頭,頚,胸部から被験歯までの距離の姿勢に関する変動係数
距離 レストあり レストなし P値
頭部-被験歯 290.60±69.80 290.90±48.74 0.40 頚部-被験歯 294.96±61.12 279.63±38.03 0.40 胸部-被験歯 236.39±56.78 200.57±81.89 0.21
距離 レストあり レストなし P値
頭部-被験歯 0.05±0.03 0.04±0.03 0.33 頚部-被験歯 0.15±0.32 0.03±0.01 0.21 胸部-被験歯 0.04±0.03 0.31±0.74 0.89
レストあり レストなし レストあり レストなし レストあり レストなし
レストあり レストなし レストあり レストなし レストあり レストなし
44
図40 実験2における計測時間,切削時間,確認時間の比較(sec)
図41.予備実験に使用した石膏模型とその上面に描いた図形
時間 レストあり レストなし P値
計測時間 117.22±29.80 132.07±36.62 0.09
切削時間 97.41±16.29 118.16±30.16 0.05
確認時間 13.91±12.80 19.80±15.29 0.16
レストあり レストなし レストあり レストなし レストあり レストなし
*
45
図42.予備実験におけるダイヤモンドポイントの軌跡(直線型)
図43.予備実験におけるダイヤモンドポイントの軌跡(曲線型)
図44.予備実験におけるダイヤモンドポイントの軌跡(直線曲線複合型)
歯科医師群 学生群
歯科医師群 学生群
歯科医師群 学生群