振 り 子 の 運 勤 の 自 動 測 定 例
宮 坂 忠 昭 春 原 眞 一
Applied Measurements of Pendulum Motion Tadaaki MIYASAKA and Shinichi SUNOHARA
Thes i n gl ep e n d u l umsa r ea pp e a r e da st e a c hi n gma t e r i a l si nma n yp hy s i c st e xt ‑ boo ks .Th e ya r eus e db e c a u s et he i rmo t i o ni ss i mpl ean di so b t a i n e df r o m s i mpl e e xp e r i me n td e v ic e s .Bu tt hes i g ni f i c an c eo fp hy s i c si nc l ud e sma n yf a c t s .Tha tt r e a t ‑ me n t so ns t u d y i ngp h y s i c sa r eno twe l l ・ b a l a n c e di nt he o r y, f o ri ti sdi 爪c ul tt ome a s u r e e xp e r i me n t a l yt hep e n du l u ms 'mo t i o n.
Fr o mt hep o i n to fvi e w, i ti sne c e s s a r yf o rust ome a s ur ep r e c i s e l yt hemo t i o no ft he s i n gl epe n d u l u mf o rt hee xpl a na t i o noft h ee n e r g yc o ns e r v a t i o n.
Thi spa p e rr e f e r st oan e wme t hodt ha ti su s e dt ome a s u r eb o t ht h eva r t i c a la nd ho r iz o nt a lmo t i o no ft hes i n gl ep e nd ul u m. Wec a nus e' ' Di g it a i z e r "whi c hi sof fe r e df o r i n t r o d uc i ngt he点g u r ei nf o r ma t i o nt oc o mp u t o r .
1 . 緒 言
応用物理教育 において,単振 り子運動は簡単 な装置で実験可能で,かつその内容 は多様性 をもつため,力学的分野のみならず他の分野の対応例 まで利用 される.その運動 を拡張 して 平面的あるいは垂直的にとらえるかによって,前者 は円錘振 り子 の運動解析,後者 は単振 り 子の力学的エネルギ保存の法則,ばね振 り子の運動等に教材 として利用 されている.
これ らの内容 は,ほとんどが理論的取扱いにとどまってい るのが現状である.それは実験 によって定量的に扱お うとすれば,周期
Tの測定 はともか く, これ ら運動の特徴 とも言 える 軌跡の時間的変化の複雑 さを定量的に測定するのは,ほとんど不可能に等 しか ったためであ る.例 えば, (ネ振 り子の運動では,瞬間速度の測定が困難なため運動エネルギが, また静止 座標が正確 に測定 されない と位置エネルギがいずれ も決定 されず,力学的エネルギ保存 の法 則の実験的取扱いは不可能で,その発表例 は少 なかった.
これ ら理論的取扱いの教材を具体的かつ実験的な教材 に変 えるために,マイコンと図形処 理装置に工夫を加 えることで振 り子運動の簡単 な自動測定を試み,更に応用物理教育 に利用 した
1). この方法 は( 1 ) 市販 されている装置 を用 う.( 2) 規模 はできる限 り小 さ くす る.( 3) 低い 価格の 3 点を満足す る.
●1 9 8 9
年3
月春季 ・第3 6 回応用物理学関係連合講演会にて発表 日 基礎専門 応用物理 教授
' ' '‑般科 物理教室 技官
原稿受付 平成2
年6 月 3 0 日
3 6
宮 坂 恕 昭・J t ir J i t ‑凧 ‑
になったので測定例 を報告す る.
2. 実 験 方 法 2・1 理論 と測定内容
単振 り子 の平面運動 で,Ⅹ一Y方 向の復元力 が作用 した場合 の楕円振動 に関 しては前報( I ) に 譲 り,図 1に示す よ うな弾性係 数 k の はね に つ り下げ られた質量 m の物体 の運動 は
d
2x
m ‑ 1軒 ‑=
一 krこの微分方程式 の解 は次式で示 され る.
( 1 )
x ‑A o
cos(a ) i + ao ) ( 2 )
k
q i
^^ooD闇図
1はね振 り子のエネルギ関係 ここで
W ‑ 2 f Ji ( 3 )
であ り ,A o ,α .は初期粂L ' Iで決定 され る. H,′ レ..
次にこの振 りfの位f E t 3‑ ・ ' ( . ルギ と i H i 軌 エ
ネル ギは次式で示 され る,
U ‑I k l ・ 2 J r ‑喜 ",L・2
応用物理の教材 としては ,U+K ‑一定 として 取扱 うが,本 実験 で は位 置
(∫)と速 度
(〟)とが かな り接近 して測定可能であるか ら,最大振幅 を X ,中立点 での速度 を V とすれば次式 よ り X と V とは比例 し, この関係 を実験値 よ り計 算で確かめれはよい.
i k X
2‑ i ‑V2 ・ ・ ・ x ‑r X v ( 4)
2・2 実験装置
詳細 は先報
ll
)に譲 り概略 を記す. マイ コソは 1 / Lア トが他 メーカの機種 と共通で利用可能竺 l 点 を も つMS X 磯( 2 ) を用いた.小型 でかつ安価 で, スロッ トが複数用意 され常時多種類 のイソ クーフェイスが簡単 に使用で きその応用範囲が 広い
(3).運動 の軌跡をマイコソに取 り込む のに,図形 処理装置 (マイタブレッ トー
Ⅰ7)( 4
)を用 い,その
図 2 測定装置
図3 振 り子運動の自動測定装置
掘り; r ‑ の
過勤の自軌州延例 m
カ‑ ソル部 を締出子 として振 り子 に取 りつけることに より,あ る時間間隔であるが測定 榊J n:
0. 1 mm で挫標 x. ,y, 、が測定可能 になった.読み取 り有効面積 ( 振 り子遊動範囲、;' 3 M)
n l mX2 6 0mm ,測定時間間隔 は最高で約 1 0ms であ る.測定 された座標値 は RS 2 3 2 C の カ ー トリッジを介 してマイコソに取 り込む とともに, マイコソ内の時刻 と合せ て処理 し,迎肋 の軌跡は XY フ ロックに描画 し ,TV に表示 させ る.数処理 された結果 はブ リソタで打 ちL L I J . し,その保存 をフロツビにす る.
検出子 は装置付属のカ‑ ソル部 をそのまま使用 して もよいが,質丑,形状 ともに大 き く, 振 り子 に取付 けた場合 その影響 が大 きいので自作 した.検出 子は中空の コイルか らなってお り各種 の コイルを試作 し測定 した結果 ,0. 5mm 少のエナメル線 を直径 3 2m m の紙製 ポ ピソに 3 20 T 巻 いたのを用いた.
実験装置の全体図 を 図2 にその実際 を
図 3に示す.図形処理装既 を垂直 に立 てて,単振 り 子の運動 と/:ネ振 り子 の
i51!.Tr M i J 測定 してい る.l T i前に MS X コソヒュータとそれ に挿入 され た RS 2 3 2 C J ・クイックデ ィス クの カー トリッジが見 える.垂 直面内の振 り子 の運動測定用 の検出 コイルを 臥 H・ =7 r J IT. ?王 妃の プロ ノク図を 図 5 に示す. スロット は 3 つあるが, この 場合 1つ不足で 7Pツヒデ ィスクとクイ ックデ ィスクは測定 目的によって,選択使用す る.
図4 検出子
2・3 測定用プ ログラム
自動測定 させ る7●pグラムは,高速性 を優先 させ るためには マシソ語 が適す るが,汎用性 と簡便性 か ら BASI C を用 いた.
これは他 の目的 ( 例 えば フー コー振 り子 の自動測定等) に応用 可能 とした.代表例 として,バネ振 り子 の運動 の自動測定 プ ロ グラムは次の順序によった.
( 1 ) 振 り子 の質
屋刑,長 さ /を測定 した後,マ イ コン と図形 処理装置への初期条件 を送出, ファイルを開 く.
( 2) 図形処理装置で振 り子の位位 を測定 して X ( Ⅰ ) ,Y ( I ) 座標
図5 振 り子の運動の自動測定装置回路図
3 8
l Lepl o to fP E n d ur a m卜 仙 o n
宮 坂 忠 昭 ・春 原 晃 一
50mm
図 6 楕円振動の測定例
図 7 楕円振動の時間的変化の測定例
楕円振動の測定値例
2n15en8331m851744LD36‑42n{pnLDFL)やr亡n11LDGt5nGt3N656tLlS
A(Ⅰ)zX‑173【H l)tlS2Zt 1
・A(I)E芳一1788(I)‑1IArt 2 A(I)tX‑16AB(I)‑‑ 551; 3 A日 )tX‑135B(I)と‑1517 JI A(I)一一eeeH IF‑77Ⅰ‑ S Au IE‑396
日
)一文1135II AH )JE 17B(I)FV̲lleOⅠ‑A(I)巳 71Btt)Fl‑2e2lt 8 A(エ)写119B(I)F文一21)8Ⅰ暮 う A
H
)一156B(I)暮%‑195Ifle A(I)=176B(I)■V〜1‑153lzEll A(Ⅰ)Fl75B(I)tX‑1eAlt12 A(ZJt16争B(I)I‑dAlと13 A(I)t127B(I)Z 27Ⅰ≒lA A(Ⅰ)■ 83B(I)亡 9eI=15 AtZ〉E 27B(ll≒142Ⅰ=16 A(∫);‑296tZ)F187Z717 A(I)I‑82B(I)=2ら7l=18 A(I)事‡‑1289(I)と2¢41=19 A(I)壬XI,・16eBH It188Ⅰ岩Ee A(I)とX‑174B(Ⅰ)2=1471己.51̲ A(I)tXl174B(I)5 91Z=22としてマイコンに取 り込む.
( 3 ) 運動 の周期 T に合 うよ う測定 を くりかえし,前後 の差 を計算 しな がら,読み取 り誤差 を検討 し,あれ は測定をや り直す.
( 4 ) マイコン内のクロック値 を用 い て,位置 のエ ネルギ U と運 動 エ ネ ルギ 〟 を計算 してゆ く.
( 5 ) 運 動 の軌 跡 を XY プ ロ ッタで 表示 し,更 に位置のエネルギ,運動 のエネルギ,周期,振幅 を表わす.
( 6) 測定結果 の数値 は, プ リンタで 記録 し,更 に フロツピに保存す る.
( 7 ) ファイルを閉 じる.
3. 測 定 結 果 3・1 楕 円振動 ( 水平面内測定) 先 の研究 にも一例 を報告 したが,
∫ , γ方向の双 方 の振 動 を合 成 した
結果 で あ る.質 量 ∽‑1. 25kg ,の
円筒 状 振 り子 を長 さ 7 ‑1. 86 6 m ,
太 さ d‑0. 3 mm の ピア ノ線 で吊 っ
た場合 の測定結果 を図 6 に示す. 1
周期運動 を数処理後直 ちにその軌跡
を ⅩY プ T lッタで描 い た. また 測
定数値例 は表 1 に示 す.周期 T は
T‑2 7 r J 許す で示 され 測 定 結 果 は
T‑2. 7 6( S ) で あ った.本校 に近 い
長野市松代 の重力 の加速度の値 を採
用 して( 5 ) , 9‑9. 7 9 7 6 を代入 す る と
理 論 値 T‑2. 7 4 が得 られ, ほぼ実
験誤差内で一致 してい る.周期内で
約 2 4 回の読み取 りが行 なわれ てい る
ので時間間隔 は約 1 2 5( ms ) 要 し, こ
れは RS‑ 2 3 2 C の読み取 り速 度 と比
較 してかな り遅い.理 由はマイコン
内での計算を行 なった後 に読 み取 り
したためであ る.運動 に追従 した軌
跡表示を重視 した もので,数値 のみ
振 り子の運動の自動測定例
読み
取 り,その後計算 と表示をさせ るよ
うソフ トを改めればよい.
3
・2楕円振動の時間的変化 3
・1と同 じ振 り子の運動に,任 意 の
XY方向 に 僅
かな弾性係 数 を も つ ばね ( 実際 に は 0 . 3 m m の検出 コイルか らの信号取出し用エナメル 級)を入れた場合,振 り子 の軌跡の 連続変化を 図 7に示す.
約1時間20 分にわたる振動の変化を
10数分間間 隔をおいて数1 0回周期を重ね
てXY
プロッタに描かせた.連続の描画で あると全てが塗 りつぶされて,その 変化が捉えられないためである. こ の結果の詳細は検討中であるが,微 小バネの弾性係数測定 との関連 とし て興味深いものがある. この 図 7か ら容易 に振 幅 a,b,位相差 の変化 の様子,が説明可能にな り楕円振動 の具体的な教材 として有用である.
なお図で外側の大 きな振幅における 不規則な直線状の軌跡は測定器の読 み取 り不能の結果である.
3
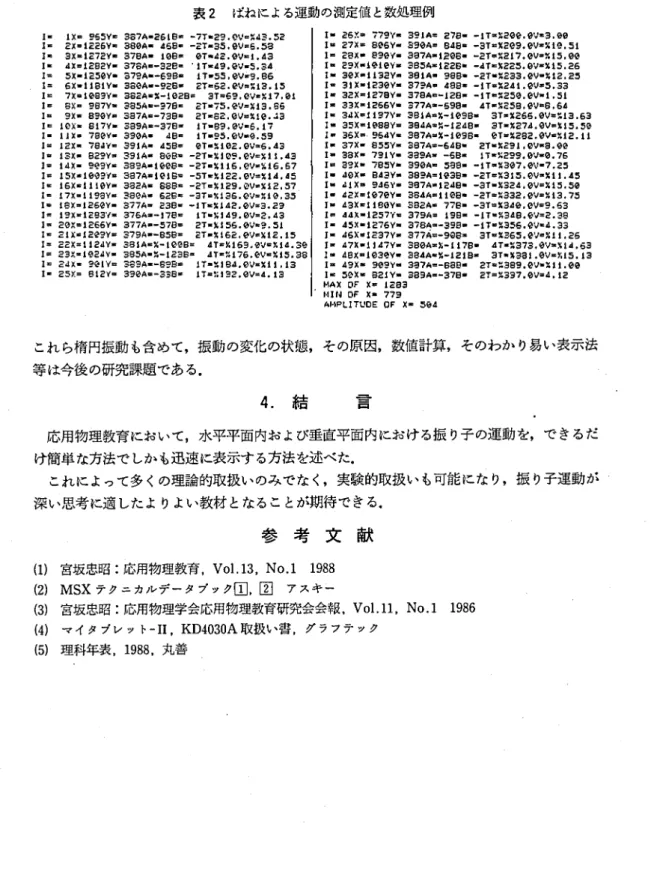
・3ばねによる振 り子の運動 ( 垂直面内振動)
弾性係
数kのはねに吊 り下げられ
T h ePI o t8 fP e n d u l u m卜
bt i ロ
nNAGAN)NATICr仏LCCLLEGECFLTEmOGY 叫■ rt巾帥1o†AppHcdPTIYllcJ
図 8
はねによる振 り子の運動 の測定例T h ePl o to fP e n d u l u m M〕 t i D
nNAGANONATlONALCOLLEGEOFTECけ」仇.OGY DcplrtrnentOIAppliedPhylicf
h匡 巨 匠 巨 .
図 9
ばね による振 り子の運動の時間的変化3 9
た質 量 桝の単振 り子運動 は,図形処
理装置を
図 2に示す ように垂直に
置きⅩ方向の変位 を 垂直方向にす ることによって得 られ
る.従って主
にⅩ方向の変位のみを
ⅩY プロッタに描 画するには, これを横軸にし,時間
変化を
縦軸にした.
m
‑3. 1 2 ( k g),バネの弾性係
数k
‑87.
2(N/ m)を使 った場合の測定例 を
図8に示す.振 幅は平均 5 0 m m で
,1周期 ごとに減衰 しているの が わかる.左側に速度が棒 グラフ状 に示 し てある.中央の運動の軌跡は,連続
100回の測定結果を示 してお り.数
値は連続 に5 0回 ,Ⅹ 座標 , Y座標
,Ⅹ方向変位( 振幅) ,
Y方向変位,時間 , 速度の順 に
ブリソタで打 ち出 して ある.速度グラフか ら速度は振動の
中心で最大値をと り ,振幅が最大値をとる時最小値 を と ることがわかる.振動の減少の割合
と速度の最大値の
減少の割 合 は 式 ( 4) か らもわかるように, 実験値 も一致す る.位置のエネルギ U と運動エネル ギ K とが 互 に変換 される過程 も数値計 算可能 となり教材 として用いられる.
次に数分間測定を空けた場合の運動の変化を図
9に示す. この結果
,1回当 りのエネルギ
損失が直ちに計算可能であ り,振幅が少ないとい
かにエネルギ損失が少な くなるかがわかる.
宮坂 忠昭 ・春 原 真 一
表 2 ばねによる運動の測定値 と数処理例
1‑ 1XJF 965YE 337A暮261B
f
‑7TtZう.eVEX43.52 1tE ZX‡1226Yt 380Al J58‑ ‑2Tl35.0>≡6.58 I‑ 3X・El三72Y暮 378A‑ 1OBF◎
T‑42.OVtl.43 Ill AXE1282Y‑ 378Al‑32Bt●lTlA9.eVFS.34 I‑‑ 5XI1258 Y
一 379AL‑69BJ IT,55.OVf9.86 1三 6XTl181
Yf 33eArl92Bt ZTと62.eV3p‑13.15 1と 7XモIe
8∋ Y
‑ 3SZAf苫‑102B= 3T・,69.eVfX17.◎l lE BX・298
7Y
t 385At‑∋78E 2T暮75.eV=X13.86 I‑ 3X‑ 8号OYJ1387AE‑73Bt 2TE昌之.OVg%l¢.13 Zt leX'18
17
Y‑ 3a5Aェ‑37B事 lT169.◎VE6.17I t
ll
X‑ 7aeY
一・39O
A. AB・= lTI95.0∨‑9.59 1≡ lZ
XI
78JYE 39I
A‑ 45BF ◎T‑〜,.ltは .01J王6.43 1書 13XI 822Y7‑331A→■B¢E3暮 ‑2T暮%le9.eVEXll.43 Z= 14X‑ 9e∋YJE 38∋A‑1eeBzz=‑2TtXllS.eVft〜16.・ 67 IF lSX‑1◎¢ ∋ Y
‑ 3a7Aflel B ! ‑3TfXl22.◎>三文14.45lt 16XFlll¢YI 382A・・888! ‑2TTX129.¢VfX12.57 Zt 17X‑1198Y‑ 3aeA‑ 62Bt ‑3TE%136.eV=笈10.35 1‑ 1萱X1126e
Y
I 377Az, 23B1‑‑1Tl%142.◎∨
‡3.29 1号 1ヨX‑1283I/‑ 376A7‑178一 lT一%149.0VE2.43 J7 20X=1266Y‑ 377AI‑5787 2TlX156.qvlI?.51 lf =IX'̀12eP Y
F 379A,‑85Bz ZTfX162.やVEX12.15Ⅰ壬 ZZXz,1124Y■ 381AlX‑leや8Z bTF%16∋.eV亡%14.3¢
l= 23Xzlや2AV‑ 385AI〜̲‑123BZ ATE〜,.176.eV一%15.38 It 2JXt 雪elY亡 3萱∋Al‑GヲB‑ 1T‑〜‑18&.OVェXll,13 IE 25X5 812Y8 33eA8‑338‑ 1TJZ!;l∋2.0∨享4.13
一>tJlJ一1‑I‑Jl'一■■■■J̲JIt
26):芋 779
Y
‑ 3PlA王 278l ‑IT事芝2○○.qy't3.00 27)くF 8eSY‑c
IL
E I
X● 89e Y
1 29
X‑ 1
¢leYJ 3eX■1132Y‑3IX暮I23◎Yt 32XzE127BYf
39OA・= 84白l‑3TEx2e9.eVfXle.51 387AI12OBI ‑2T!Ⅹ217.eVz,〜̲15.○○
385AllL''12B■ ‑4TtX225.OV‑X15.26 38
1
A1 98
B一
一ZTtX233.eV一号12.25 37PA, 489‑ ‑1T一文241.eVt5.33 378A亡‑128‑ ‑1Tと325匂.eV‑1.51 33X7E1266Y‑ 377A1‑59B‑ ATJEP,.258.eVと6.64 34Xf119
7Y ‑
381A丘X‑1e9
B暮 3T,x266.OVとy"13.63 35XIl◎88YF 38JA壬'1‑1248lF ヨTtX27A.◎VFX15.5¢36X7 954Yt 387AalX‑1¢
9 8
1 eTzX282.◎>一別 2.ll 37X‑ B55YI∋aX‑ 7
∋
1Y
.r 3e
X■ 785Y
‑ dOX■ BA
3Y
■ JIX1 94ら Y ‑
AEXzz;lO7
e
Yt A3XEl180Yt A4X‑12571 1
't 45)く一1276Y
■387A=‑S
A
Bt 3aPA7 ‑68‑390A‑ 588‑
38ヲAEle3Bl 387A.・12
J B ‑
384AFll
e B ‑
382À 77
8 ‑
379A= 19B
l
378Az2‑398‑
2Tt̀Xc.91.eVI8.Oe lTtX299.0VT0.76
‑1T事%3¢7.eVt7.25
‑2TFX315.¢∨事XII.▲5
‑3T一%324.¢VEX15.50
‑2T=X332.eV‡X13.75
‑3T=X3A◎.eVE9.63
‑
1
T■%∋▲8.¢∨=2.38‑1TfV〜356.eVtA.33
Z
l A6XflE37Y′ 377A=‑90BI 3Ttは365.e■ノ̀X11.26 1I A7X■1147Y
I 38◎AFli‑117BI dTJ苫373.◎VIXIJ.63 l2' A8XzFtlO3eY
‑ 3aAA‑V̲‑1218‑ 3T一%381.◎∨
‑)',15.13 1zE A∋
X暮 ヲ匂 ヲ Y
‑ 3a7A亡‑Sa8‑ 2Ttt̲389.'e
V一文11.00 lf 5eXt 821Y
l‑3a∋At・‑37B‑ 2丁三又3∋7.OV‡4.12 MAX DF X‑ 1283111IN DF XI 77
9
AIJIPLITUDE OF X‑ 3◎4