NAIST-IS-MT1051008
修士論文
拮抗筋群の活動に基く腕の運動解析
伊藤 隆洋
本論文は奈良先端科学技術大学院大学情報科学研究科に 修士 (工学) 授与の要件として提出した修士論文である。 伊藤 隆洋 審査委員: 小笠原 司 教授 (主指導教員) 杉本 謙二 教授 (副指導教員) 高松 淳 准教授 (副指導教員) 池田 篤俊 助教 (副指導教員)
拮抗筋群の活動に基く腕の運動解析
∗伊藤 隆洋
内容梗概 人は,関節数より多くの筋肉を持っており,拮抗関係にある筋群を使って関節 剛性を制御している.ここで剛性とは関節のバネ剛性を表す指標であり,これま で様々な剛性推定に基づく運動解析が行われている.別の視点で考えると,腕の 姿勢が主動筋と拮抗筋の釣り合いによって決定されると見なすことが出来る.こ のことから,運動計画において筋力の釣り合う姿勢である平衡位置を徐々に移動 させることで運動を制御していると考える平衡軌道制御仮説がある. 本論文では,腕を対象として表面筋電位と姿勢を用いて,拮抗筋の活動を考慮 した剛性と平衡位置の推定手法を提案する.表面筋電位と姿勢の計測結果からシ ミュレーションモデルを用いて発揮筋力を計算し,拮抗筋群の発揮を考慮した剛 性と平衡位置を推定する.水平面内における円軌道を描く運動を対象として,運 動中の剛性と平衡位置を推定する実験を行う.実験結果より提案手法により得ら れる剛性と平衡点について議論し,屈曲・進展の筋群がどのように作用している かを示す. キーワード 筋骨格, 表面筋電位, 内力, 筋力推定, 剛性, 平衡位置, 到達運動Arm motion analysis based on agonist and
antagonist muscle activity
∗Takahiro Ito
Abstract
Human has much more muscles than joints and control joint stiffness using agonist and antagonist muscles. In this case, joint stiffness means spring coef-ficient of flexion or extension of joint, many motion analysis research based on the joint stiffness are reported. From the other viewpoint, we can say that an arm posture is depended on a balance of agonist and antagonist muscles. The balanced arm posture is called equilibrium point. The equilibrium point control hypothesis which arm movement is achieved by gradually shifting equilibrium point is proposed. In this thesis, I produce an estimation method of stiffness and equilibrium point using surface electromyography (SEMG) and arm posture dur-ing arm motion. Muscle force is calculated from the SEMG and the arm posture using an arm musculoskeletal model. Then the stiffness and the equilibrium point are estimated from the muscle force using the arm model. Drawing circle mo-tion on a horizontal plane is employed for an experiment of the stiffness and the equilibrium point estimation. I discuss about an effect of agonist and antagonist muscles based on the experimental results.
Keywords:
Musculoskeleton, Surface Electromyography, Internal Force, Stiffness, Equilib-rium Position, Reaching Movement
∗Master’s Thesis, Department of Information Systems, Graduate School of Information
目 次
1. 緒言 1 1.1 研究背景 . . . . 1 1.2 関連研究 . . . . 2 1.2.1 運動制御に関する研究 . . . . 2 1.2.2 剛性推定に関する研究 . . . . 2 1.2.3 筋骨格モデルに関する研究 . . . . 4 1.3 研究目的とアプローチ . . . . 6 2. 拮抗筋群を考慮した剛性と平衡位置の推定手法 8 2.1 筋骨格モデル . . . . 8 2.2 筋力推定 . . . . 8 2.3 剛性推定 . . . . 13 2.4 平衡位置推定 . . . . 14 3. 上腕の水平面内運動計測実験 17 3.1 システム概要 . . . . 17 3.2 実験条件 . . . . 19 3.2.1 円軌道運動の指示方法 . . . . 19 3.2.2 実験手順 . . . . 19 4. 無負荷での円軌道到達運動 21 4.1 実験結果 . . . . 22 4.2 考察 . . . . 30 5. 手先に負荷のある円軌道到達運動 34謝辞 46
参考文献 47
付録 51
A. 筋肉モデルと筋骨格モデルのパラメータ 51
図 目 次
1 摂動を用いた剛性推定の例 [13] . . . . 4 2 右上肢の筋骨格 [23] . . . . 5 3 水平面内における右上肢の筋群モデル [24] . . . . 5 4 従来の剛性推定の例 . . . . 7 5 剛性と平衡位置推定のブロック線図 . . . . 9 6 2関節 6 筋モデル . . . . 10 7 筋肉モデル . . . . 10 8 正規化長さと正規化筋力の関係 . . . . 12 9 正規化収縮速度と正規化筋力の関係 . . . . 12 10 手先剛性の区間別推定 . . . . 15 11 システムの概略 . . . . 18 12 計測する筋肉 [32] . . . . 20 13 マーカの配置 [32] . . . . 20 14 無負荷の円軌道運動実験の概観 . . . . 21 15 無負荷での実験結果:被験者 1(従来手法) . . . . 24 16 無負荷での実験結果:被験者 1(提案手法) . . . . 25 17 無負荷での実験結果:被験者 2(提案手法) . . . . 26 18 無負荷での実験結果:被験者 3(提案手法) . . . . 27 19 無負荷での実験結果:被験者 4(提案手法) . . . . 28 20 無負荷での実験結果:被験者 5(提案手法) . . . . 29 21 時刻 3.2[sec] での手先剛性 . . . . 31 22 無負荷の場合での手先剛性推定結果:被験者 3 . . . . 32 23 無負荷の場合での手先剛性推定結果:被験者 3 . . . . 3329 負荷のある実験結果:被験者 5(提案手法) . . . . 41 30 時刻 2.6[sec] での手先剛性:被験者 1 . . . . 43 31 負荷のある場合での手先剛性推定結果:被験者 3 . . . . 44 32 手先の発揮力計測の実験環境 . . . . 53
表 目 次
1 筋電アンプの仕様 . . . . 18 2 筋肉モデルのパラメータ . . . . 51 3 筋肉のモーメントアーム . . . . 51 4 腕のパラメータ . . . . 511.
緒言
1.1
研究背景
近年,ロボット工学,スポーツ工学,およびリハビリ工学の分野において,人 間の身体運動の評価が盛んに行われている.ロボット工学では新たな教示システ ムの構築や制御手法の開発,スポーツ工学では熟練者のスキル評価,リハビリ工 学では運動を補助するアシスト装具の評価や既存のリハビリ手法の評価などの利 用に,身体運動の分析および評価の利用が考えられている [1]. 人間が運動を行う際,1 つの関節は複数の筋肉によって動かされており,特に 四肢は主動筋と拮抗筋の協調的な運動によって,手先や足先の位置制御および各 関節の剛性制御が行われていることが知られている.ここで,主動筋とはある特 定の運動の実現に直接関わる筋および筋群であり,拮抗筋は主動筋の反対の作用 を持つと考えられる筋および筋群である.たとえば肘関節を屈曲させる場合,上 腕二頭筋が主動筋であり,上腕三頭筋が拮抗筋となる.これら筋肉の協調制御に 関しては,関節周辺の主動筋群と拮抗筋群を調節することで,外力に対して摂動 効果を最小にすることが報告されている [2][3].また,単関節および多関節の運動 において,主動筋と拮抗筋の共収縮により関節の剛性が増加して運動の安定性を 高めるため,運動の相互トルクと外力に対する摂動効果の減少によって運動精度 が向上することが報告されている [4][5][6][7]. このように,筋肉の協調動作により人間が環境や運動の変化に応じてどのよう に筋骨格系の特性を調節するかを調べることは,人間とロボットなど外部環境と の相互作用や運動スキルの評価などにおいて重要な課題である.1.2
関連研究
1.2.1 運動制御に関する研究 人や動物は,四肢の構造を巧みに利用して,意図した行動を実現している.こ のとき,運動する前に運動制御が計画されている必要があり,運動制御の計画を 実現する方法がいくつか提案された.1 つは姿勢制御の延長として運動制御も実 現されているとする平衡位置制御である [8][9][10].筋肉はバネのような力学的特 性をもつため,腕の姿勢は主動・拮抗する筋群により生じている張力の釣り合い によって決定される.この観点から,この平衡状態によって決まる姿勢を徐々に 移すことで運動の軌道を計画する.この制御法は,1 つの計算原理で姿勢の維持, 軌道制御,力制御を統一的に説明できる.さらに,手先を点から点に移動する到 達運動における随意運動の手先軌道が躍度最小軌道で近似できることから,Flash らは平衡位置の軌道が躍度最小軌道で計画されているとする仮説を提唱し,手先 運動のシミュレーションを示した [11].もう 1 つは逆運動学や逆動力学の逆問題 を学習により解く方法である [12].腕の運動は,筋骨格系の静的な力学特性と動 的な力学特性に依存している.この観点から片山らは,逆静力学モデルと逆動力 学モデルを並列にした並列階層制御神経回路モデルを提案している. 1.2.2 剛性推定に関する研究 1.2.1節で述べた仮説が人の運動制御機構を説明するかどうかを明らかにする ため,また筋骨格系の特性の調節と運動の習熟の関係などを解明するために人腕 の手先の剛性推定について研究されている.それらの多くの研究では,大きく分 けて 2 つの剛性推定方法がある.姿勢保持中あるいは外力を変化させている間に 強制変位を与える手法と,表面筋電位計測と筋骨格モデルを用いた手法である.Mussa-Ivaldiら,Gribble らは,図 1(a) のようなロボットアームを用いて被験 者の手先にステップ外乱を与えることにより,姿勢保持中での手先剛性を推定し, 剛性楕円体として評価している [13][14].ここで,手先剛性とは,ある姿勢のある 筋活動度の状態にある手先に変位 1[m] を与えた場合に発生する反力 [N] を示した ものであり,その変位を各方向から手先に与えた場合の反力を描画した,図 1(b)
のような楕円体である.Mussa-Ivaldi らの手先の剛性楕円体についての報告は以 下の通りである. • 剛性楕円体の最大方向は,どの姿勢においてもほぼ肩の方向を向く • 手先位置が身体の近くになると,剛性楕円体の向きが反時計回りに回転する • 手先位置が身体から離れると,剛性楕円体の形状は細長くなる • 筋肉の同時活性を行うと,剛性楕円体は方向性形状を変えずに大きくなる • 姿勢保持中,剛性楕円体の最大方向は外乱方向に応じて変更することはで きない • 同じ実験条件や教示の下でも,被験者や実験を行った時期により剛性の大 きさは異なる また辻らは,手先剛性楕円体の形状および方向は同様であるが,リラックスした 状態ではその値が小さくなることを報告している [15].運動中の剛性を調べた研 究としては,五味らが 2 関節運動中における剛性について,摂動による強制変位 を手先に与えることで計測を行なった.そして,運動中の関節剛性が静止中リラッ クスした状態よりも上昇することなどを報告している.また,推定された剛性か ら平衡位置を推定し,筋レベルでの人間の運動計画を検討している [16].剛性楕 円体の方向性については,Flash らが実験肩関節まわりの単関節と肩・肘関節の 両方に作用する 2 関節筋との間の協調活動によってもたらされる可能性を示唆し ている [17].Miler らや大須らは,学習に伴う手先剛性の変化について,はじめは 屈筋と伸筋の同時活性化が起こるが数時間の練習により筋活性レベルは減少し, 剛性の減少が示唆されることを報告している [18][19].これらの学習に関する報 告は,人が内部にもつ制御モデルが練習により最適化され,エネルギ効率の良い
(a) 摂動を与える実験環境 (b) 手先の剛性楕円体 図 1 摂動を用いた剛性推定の例 [13] 1.2.3 筋骨格モデルに関する研究 剛性推定による運動解析を行うには,筋肉や骨格などのモデルである筋骨格モ デルが必要となる.ここでは本論文で扱う右上肢について説明する.腕は肩,肘, および手首の 3 つの関節が存在し,図 2 に示すように多数の筋肉で複雑に構成さ れている [23].人体のモデル化を詳細に行うとモデルの複雑化により解析が困難 になるため,モデル化不必要な構造や特徴を取捨選択し,必要最低限なモデルの 構築を行う必要がある. 本論文では水平面内の右上肢での運動を対象とするため,一般的に 2 次元の上 肢モデルとして用いられている熊本らの筋骨格モデルについて述べる [24].図 3 に 右上肢を水平面に対して垂直方向から見たときの,主要な筋群を示す.水平面内 での運動において,肩関節に係る単関節筋群は三角筋前部と三角筋後部,肘関節 に係る単関節筋群は上腕筋と上腕三頭筋外側頭,肩と肘の関節に係る二関節筋は 上腕二頭筋長頭と上腕三頭筋長頭であり,それぞれが拮抗する関係となっている.
1.3
研究目的とアプローチ
人間と環境との相互作用や運動スキル評価などを目的とした,剛性推定による 運動解析が数多く行われてきた.しかし,従来提案されている剛性推定手法は, 図 4 に示すように主動筋群と拮抗筋群の剛性総和を用いて各関節の剛性を推定し ている.そのため,主動筋群と拮抗筋群の同時活性による各関節や手先剛性の解 析は可能であるが,推定された剛性が含む主動筋群と拮抗筋群がそれぞれ作用す る割合は考慮していない. 本論文では,主働筋群と拮抗筋群それぞれの活動を区別した剛性・平衡位置推 定手法を提案し,各筋群の環境や運動の変化に対する特性調節を解析する運動解 析手法を構築することを目的とする. 運動解析のアプローチとして,計測手法は表面筋電位計測とモーションキャプ チャを用いた姿勢計測を用いる.1.2.2 節で述べたように,剛性推定には大きく分 けて摂動による推定手法と表面筋電位を用いた手法がある.摂動を用いた手法の 場合,連続的に変化する剛性を推定することができるため,表面筋電位を用いた 手法を採用した.剛性と平衡位置の推定モデルについては,従来の水平面内二関 節六筋モデルを応用し,肩の屈曲・伸展および肘の屈曲・伸展に係る筋群ごとで の推定モデルを構築する.被験者実験として,水平面内での環境の異なる 2 種類 の円運動運動実験を行い,表面筋電位と姿勢計測から得られる筋活動度と関節角 度を入力として,運動中の手先剛性と平衡位置を推定する.実験結果より,従来 の剛性推定では筋群ごとの運動解析ができないことを確認し,その上で提案する 手法が筋群レベルでの運動解析ができることを確認し,拮抗筋群を考慮した運動 解析手法としての有効性を示す.(a) 例1
(b) 例2
2.
拮抗筋群を考慮した剛性と平衡位置の推定手法
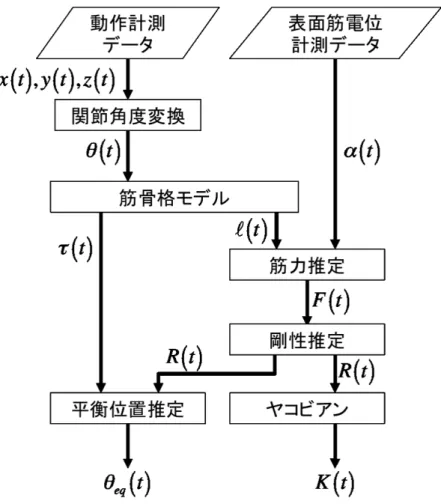
本章では,運動評価を行うための剛性と平衡位置の推定手法について述べる. 本論文で提案する剛性と平衡位置推定の流れを図 5 に示す.提案手法では,モー ションキャプチャによる動作計測と表面筋電位計測により計測される関節角度と 筋活動度を入力とし,筋骨格モデルや推定モデルを用いて剛性と平衡位置を推定 する.2.1
筋骨格モデル
本論文では上腕での水平面内運動を対象とし,筋骨格モデルとして 2 次元平面 のモデルでよく用いられる,図 6 の熊本らの 2 関節 6 筋モデルを使用する [24].そ のため表面筋電位計測の対象となる筋肉についてはこの 2 関節 6 筋モデルを参考 に選定した.2.2
筋力推定
筋活動度と筋力の関係を述べるために,筋肉モデルについて説明する.Hill ら の研究により,筋肉の発揮力は筋肉が収縮する速度が速いほど小さくなるという 関係がわかっている [25].この Hill の法則に基づいて様々なモデルが考案されて いるが,本研究では Hatze の筋肉モデルを参考に図 7 のモデルを用いる [26]. F(t) = Tmax· {τ (t) · k (x(t)) · h ( ˙x(t)) + fp(x(t))} (1) 筋肉モデルの式については,坂口らが筋活動度と筋力の関係を定式化した手法 を用いる [27].ある時刻 t[sec] での筋肉が発揮する筋力 F(t) を,筋活性度 τ (t)(0≤ α ≤ 1) と筋肉の長さと収縮速度に依存して筋肉の収縮要素が能動的に発揮する 能動部の力,そして受動的に伸張することで発揮する受動部の発揮力の合成で表 したものである.ここで,Tmaxは等尺性収縮力の大きさで,各筋肉の生理断面 積 (Physiological Cross Sectional Area: PCSA) に最大筋応力 (62[N/cm2])を乗 じることで求めており,Wood らや Ikai らの報告を参考にしている [28][29][30].図 6 2 関節 6 筋モデル 図 7 筋肉モデル パラメータの値については表 2 に示す.x(t) は筋肉の長さ l(t) を筋肉の至適長さ r(θ1(t), θ2(t))=(肩関節 45[deg], 肘関節 90[deg] での筋肉の長さ) で割った正規化長 さ, ˙x(t) は正規化収縮速度である.なお,筋肉の長さ l(t) と筋肉の正規化収縮速 度 x(t) は以下の式で求める. l(t) = lm− A · θ1(t) θ2(t) (2) x(t) = l(t) r (3)
ここで,筋肉の自然長は lm=(肩関節 0[deg], 肘関節 0[deg] での筋肉の長さ),A は
各筋肉のモーメントアームであり,各要素は図 6 に対応している.また r は筋肉 の最大収縮速度である.これらのパラメータは Wood らの報告を参考にし,値に
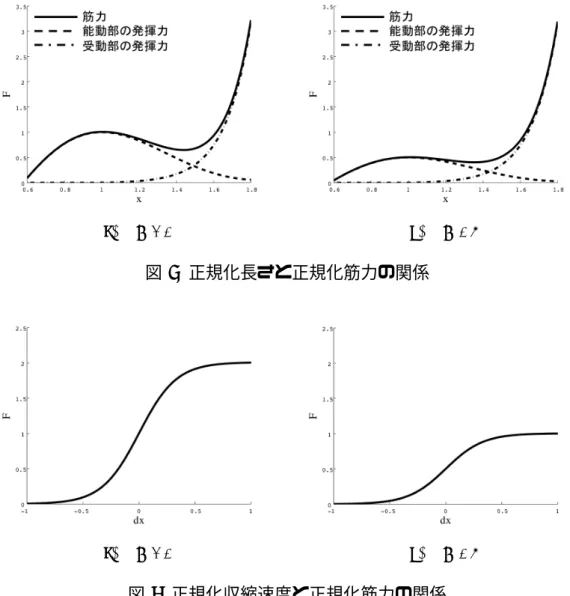
ついては表 3 と表 2 に示す [28][29]. A = a11 a12 0 0 a15 a16 0 0 a23 a24 a25 a26 (4) k(x(t))は筋肉の正規化長さ x(t) と力の関係式,h( ˙x(t)) は正規化収縮速度 ˙x(t) と 力の関係式,fp(x(t))は正規化長さ x(t) と筋肉の収縮要素に並列して配置された 弾性要素が発揮する力の関係式である.筋肉の正規化長さと正規化筋力の関係を 図 8(a),8(b),筋肉の正規化収縮速度と正規化筋力の関係を図 9(a),9(b) に示す. それぞれの関係の定義式は次の通りである. k(x(t)) = 0.32 + 0.7exp{−1.112(x(t) − 1)} sin {3.722(x(t) − 0.656)} (5) h( ˙x(t)) = 1.005{1 + tanh(3 ˙x(t))} (6) fp(x(t)) = 0.01exp{7.2 − (x(t) − 1)} (7)
(a) α = 1.0 (b) α = 0.5 図 8 正規化長さと正規化筋力の関係
(a) α = 1.0 (b) α = 0.5
2.3
剛性推定
前節で示した筋力モデルを用いて,各筋肉の剛性の推定式を示す.各関節に作 用する関節剛性については,Hogan らが提案した定義を基に推定する [10].関節 の剛性は,関節角度が微小変化したときに,どれだけの関節トルクが発生するか を決定する弾性要素と定義されるため,関節剛性を R(t) とすると,次式のよう に示される. R(t) = R11 R12 R21 R22 (8) Rjk(t) = ∑ i ∂(ajiFi(t)) ∂θk (9) Rjk(t)は関節剛性 R(t) の各要素,aj,iは筋骨格モデルで示される各筋肉のモーメ ントアーム,Fi(t)は各筋肉の筋力であり,i∈ {1, ..., 6},j ∈ {1, 2},k ∈ {1, 2} は 図 6 に示す筋骨格モデルの各筋肉と各関節に対応している.ここで,(8) 式を用 いた場合,各関節の剛性はその関節に作用する筋肉の剛性の総和が各関節の剛性 としてモデル化される. そこで,各関節に係る筋群を個別に考慮した関節剛性を定義する.剛性は,各 関節をある回転方向に動かした場合にどれほどの反力が発生するかを表す指標で ある.関節の回転方向により,筋肉は強制的に収縮方向に動かされる筋肉と引き 伸ばされる筋肉に分かれる.このとき,収縮方向に動かされる筋肉は押し返す筋 力を発揮しない [31].そのため運動に対する剛性は,運動により引き伸ばされる 筋群の剛性の総和と考えられる.この特性より,本論文では関節の回転方向に依 存した条件を設定し,関節剛性を定義する. Rjk(t) = ∑∂(ajiFi(t)) , i∈ {1, 3, 5}, △θ1(t) > 0かつ△ θ2(t) > 0 i∈ {1, 4, 5, 6}, △θ1(t) > 0かつ△ θ2(t) < 0 ∈ {2, 3, 5, 6}, △θ △ θ (10)いても,先で説明した関節の回転方向に依存する関節剛性をもとに導出する.手 先に対する単位変位を与える方向により,反力を発揮する筋肉が異なるため,図 10のように単位変位を与える方向を分割し,それぞれの区間で手先剛性を求め る.手先剛性は関節角度と手先位置の関係を示すヤコビアンを用いて次のように 定義する. K(t) = (JT)−1· R(t) · J−1 (12)
2.4
平衡位置推定
Gomiらが提案する手法をもとに平衡位置を推定する [16].先で述べたように 平衡位置とは,現在の姿勢で発揮されている関節トルク τ (t) = (τ1(t), τ2(t))と 関節剛性 R(t) により推定される,平衡した腕の姿勢のときの関節角度 θeq(t) = (θeq1(t), θeq2(t))と定義されているため,次の関係式で表すことができる. τ (t) = −R(t) · (θeq(t)− θ(t)) (13) したがって平衡位置は次式となる. θeq(t) = −R(t)−1· (τ (t) − R(t) · θ(t)) (14) ここで,関節トルク τ (t) は次式で求められる. τ (θ(t), ˙θ(t), τ (t)) + G(θ(t)) = H(θ(t)) ¨θ(t) + B(θ(t), ˙θ(t)) (15) H(θ(t)) = H11 H12 H21 H22 (16) B(θ(t), ˙θ(t)) = B1 B2 (17) G(θ(t))は重力項,H(θ(t)) は慣性項,B(θ(t), ˙θ(t))は粘性力や摩擦力,コリオ リ力等を表す項である.本論文では平面運動に限るため,重力項を 0 としている.(a) 肩の屈曲側と肘の屈曲側の筋群が作用する区間
(b) 肩の屈曲側と肘の伸展側の筋群が作用する区間
(c) 肩の伸展側と肘の屈曲側の筋群が作用する区間
また,I1,I2は肩から肘までのリンクと肘から手先までのリンクの重心まわりの慣 性モーメント,M1,M2は各リンクの質量,S1,S2は各リンクの重心位置,b1,b2は 各関節の粘性である.なお,H(θ(t)) と B(θ(t), ˙θ(t))の各要素は次の通りである. なお,これらのパラメータの値は表 4 に示す. H11 = I1+ I2+ M2 { L21+ 2L1S2cos(θ2(t)) } (18) H12 = I2+ M2L1S2cos(θ2(t)) (19) H21 = I2+ M2L1S2cos(θ2(t)) (20) H22 = I2 (21) B1 = −M2L1S2sin(θ2(t)) { 2 ˙θ1(t) ˙θ2(t) + ˙θ22(t)}+ b1θ˙1(t) (22) B2 = M2L1S2sin(θ2(t)) ˙θ21(t) + b2θ˙2(t) (23)
3.
上腕の水平面内運動計測実験
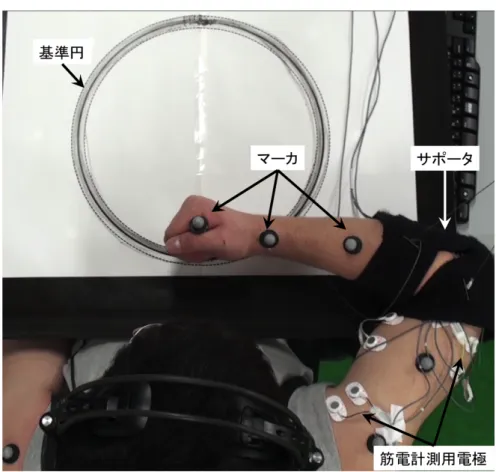
本論文では水平面内での上肢運動を対象とする.肩関節の水平屈曲・水平伸展 および肘関節の屈曲・伸展に関わる筋肉である.図 12 に示す 6 つの筋肉の筋電 位と姿勢の同時計測を行う.本章では,運動スキル評価への応用を検討するため, 従来行われてきた 2 点間での到達運動より難易度が高く,筋肉をより巧みに制御 することで実現する運動を考える.円軌道は日常的によく行う運動ではなく,被 験者の内部にある運動制御モデルが学習されていない可能性が高いため,試行の 繰り返しによる運動の習熟を考察出来る可能性がある.また,手先に掛ける負荷 の有る場合と無い場合の 2 種類の環境下で円軌道を描く運動を設定し,提案する 手法が運動評価に対して有効であるかを検証する.3.1
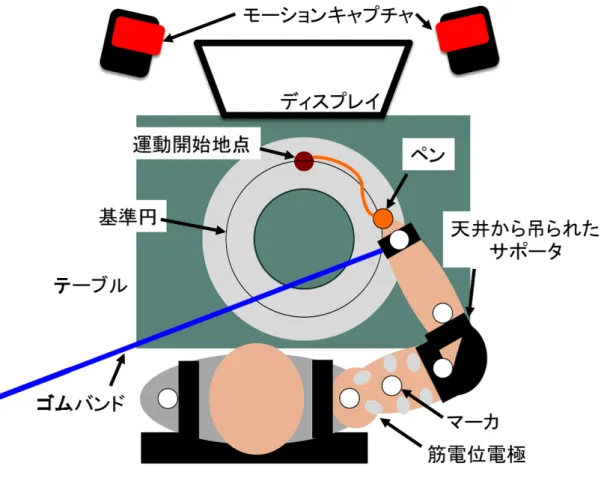
システム概要
実験に使用したシステムの概略図を図 11 に示す.被験者は基準円が描かれた テーブルの前で椅子に座り,肩および腰はベルトで固定する.テーブルと腕の摩 擦を除去するため,天井から吊るされたサポータを腕に固定して腕を宙吊りにす ることで,水平面内での2関節自由運動を可能にする.また手先に負荷を掛ける 運動の場合のみ,手先にチューブトレーニングで用いられるゴムバンドを固定し 常に張力を与える.計測装置については,動作計測には Vicon Motion Systems 製の VICON を使用 し,サンプリング周波数は 200[Hz] で計測した.動作計測時のマーカ位置を図 13 に示す.表面筋電位計測は,原田電子工業株式会社製筋電アンプ EMG-021 を使 用した.装置の仕様を表 1 に示す.サンプリング周波数は 1000[Hz] で計測を行っ た.なお,表面筋電位を計測した後,最大随意発揮時の筋活動度%MVC への変
図 11 システムの概略 表 1 筋電アンプの仕様 項目 仕様 電極数 6電極, アース 2 周波数特性 10Hz∼1000Hz(± 3dB) 増幅度 100倍 (40dB)
3.2
実験条件
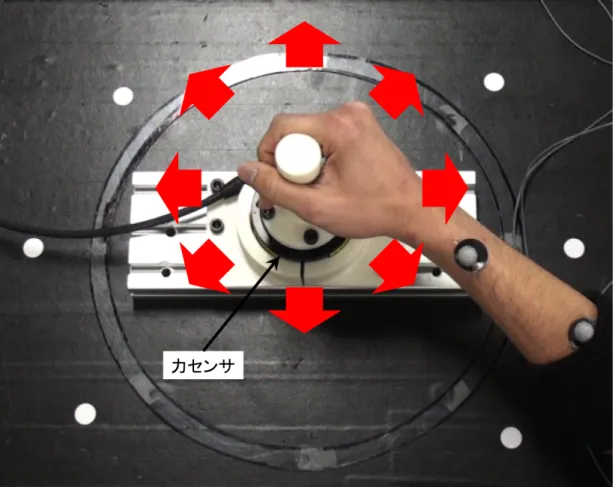
被験者は 20 代の男性 5 名である.基準円軌道の直径は 400[mm],基準円軌道と の許容誤差は± 7.5[mm] とし,運動開始から終了までの時間は 5[sec] とする.運 動の成功回数を上限 30 回として,試行を繰り返す. 3.2.1 円軌道運動の指示方法 運動の基準となる円軌道が描かれたテーブルを用意する.基準円に対する許容 誤差は許容誤差の幅を色分けして提示する.運動のタイミングとして,1[sec] 間 のビープ音を 6 回提示する.運動の開始前,被験者は図 11 の運動開始地点で手先 にペンを把持した状態で待機する.2 回目のビープ音の出力と同時に運動を開始 し,5 回のビープ音が出力されている間で円軌道を描く運動を行い,6 回目のビー プ音の鳴り終わりで運動終了となる.許容誤差の幅を超えた場合は失敗とする. 3.2.2 実験手順 以下の手順で実験を行う. 1. 最大随意発揮時の筋活動度%MVC を推定するため,最大随意発揮力を測定 する.疲労回復を図るため,円軌道運動の計測日から数日前もしくは数日 後に実施する. 2. 表面筋電位を計測するため,計測する筋肉が位置する箇所の皮膚表面に電 極を貼り付ける. 3. 姿勢計測をするため,図 13 の位置にマーカを付ける. 4. %MVCを推定するため,各方向への手先力を力センサにより計測し,その図 12 計測する筋肉 [32]
4.
無負荷での円軌道到達運動
本章ではそのうちの1つの実験について説明する.3 章で述べた実験環境と実 験条件下で,手先に負荷のない状態での円軌道を描く運動を被験者に行なっても らった.実験結果と考察を次節に示す.
4.1
実験結果
剛性推定の従来手法と提案手法との比較のため,従来手法による被験者 1 の推 定結果を示す.図 15(a) に筋力推定結果,図 15(b) に従来手法による手先剛性推 定結果,図 15(c) に従来手法による平衡位置推定結果を抜粋して示す.また,提 案手法についても同様に,図 16 − 20 に,被験者 1 − 5 についての筋力,手先剛 性,平衡位置の推定結果を抜粋して示す.図 16(a), 図 17(a), 図 18(a), 図 19(a), 図 20(a) に示す各被験者の筋力推定結果に おいて,次の傾向が確認できた. • 三角筋前部:肩関節の屈曲に係る筋肉であり,手先位置が x 軸においてマ イナス方向に動き始めるとき (時刻 0.0 から 2.0[sec] の間) にピークとなる • 三角筋後部:肩関節の伸展に係る筋肉であり,手先が x 軸においてプラス 方向に動くとき (時刻 2.0 から 4.0[sec] の間) にピークとなる • 上腕筋:肘の屈曲に係る筋肉であり,手先が y 軸においてマイナス方向に動 くとき (時刻 2.0[sec] 付近) や,運動終了時の肘の伸展を止めるときにピー クが現れる • 上腕三頭筋外側頭:肘に伸展に係る筋肉であり,手先が y 軸においてプラ ス方向へ動き始めるとき (時刻 3.0 から 4.0[sec] の間) にピークとなる • 上腕二頭筋長頭:被験者 5 名中 4 名は,手先位置が x 軸においてプラス方向 かつ y 軸においてプラス方向へ動くとき (時刻 3.0 から 4.0[sec] の間) にピー クとなる • 上腕三頭筋長頭:図 16(a) に示す被験者 1 については手先が y 軸においてプ ラス方向に動くとき (時刻 3.0[sec] 付近) にピークを示しているが,他の 4 名 については運動中を通して顕著なピークは現れなかった 図 15(b) に示す被験者 1 の従来手法による剛性推定結果において,従来知見と 同様に次の傾向が確認できた. • 手先剛性の最大方向は,どの姿勢においてもほぼ肩の方向を向く
• 手先位置が身体の近くになると,剛性楕円体の向きが反時計回りに回転する • 手先位置が身体から離れると,剛性楕円体の形状は細長くなる また,図 16(b), 図 17(b), 図 18(b), 図 19(b), 図 20(b) に示す各被験者の提案手法に よる推定結果についても,従来と同様の傾向が確認できた. 図 16(c), 図 17(c), 図 18(c), 図 19(c), 図 20(c) に示す各被験者の平衡位置推定結 果において,次の傾向が確認できた. • 運動開始直後,手先位置に対して x 軸のプラス方向に移る • 肩の伸展および肘の屈曲となる状態で,平衡位置は y 軸のマイナス方向に 移る • 肩の屈曲および肘の伸展となる状態で,平衡位置は y 軸のプラス方向かつ 円軌道の内側へ移る • 手先位置が円軌道の下方から終点に向かう際,平衡位置は終点付近へ移る
2 3 4 5 0 5 10 15 20 25 30 t[sec] F[N] (a) 筋力推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] 12.5[N/m] 12.5[N/m] 12.5[N/m] 12.5[N/m] 12.5[N/m] 12.5[N/m] 12.5[N/m] X[m] Y[m] (b) 手先剛性推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 X[m] Y[m] (c) 平衡位置軌道推定結果 図 15 無負荷での実験結果:被験者 1(従来手法)
2 3 4 5 0 5 10 15 20 25 30 t[sec] F[N] (a) 筋力推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] X[m] Y[m] 12.5[N/m] 12.5[N/m] 12.5[N/m] 12.5[N/m] 12.5[N/m] 12.5[N/m] 12.5[N/m] 12.5[N/m] (b) 手先剛性推定結果 0.2 0.4 0.6 0.8 1 Y[m]
1 2 3 4 5 0 10 20 30 40 50 t[sec] F[N] (a) 筋力推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] X[m] Y[m] (b) 手先剛性推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 X[m] Y[m] (c) 平衡位置軌道推定結果 図 17 無負荷での実験結果:被験者 2(提案手法)
2 4 6 0 10 20 30 40 50 t[sec] F[N] (a) 筋力推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] X[m] Y[m] (b) 手先剛性推定結果 0.2 0.4 0.6 0.8 1 Y[m]
2 3 4 5 0 10 20 30 40 50 t[sec] F[N] (a) 筋力推定結果 −0.5 0 0.5 0 0.2 0.4 0.6 0.8 1 1.2 12.5[N/m] X[m] Y[m] (b) 手先剛性推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 X[m] Y[m] (c) 平衡位置軌道推定結果 図 19 無負荷での実験結果:被験者 4(提案手法)
2 3 4 5 6 0 10 20 30 40 50 t[sec] F[N] (a) 筋力推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] X[m] Y[m] (b) 手先剛性推定結果 0.2 0.4 0.6 0.8 1 Y[m]
4.2
考察
図 15 に示す被験者 1 を例として抜粋し考察する.まず従来手法による手先剛性 の推定結果については,報告されている特徴と同様の形状変化が確認できる.特に 図 21(a) に示す腕を屈曲させる方向から伸展させる方向へ状態が変化する際,手先 剛性が高くなる傾向がある.図 15(a) に示す筋力発揮と比較すると,時刻 3.2[sec] において三角筋後部と上腕三頭筋外側頭の活動が増加することで手先剛性が増加 していることがわかる.しかし,従来手法ではどの筋群の活動による剛性の増加 なのかは判断できない. 次に提案手法での推定結果を,従来手法と比較して考察する.図 21 に示す被 験者 1 の実験結果は,上記従来手法により推定した実験結果と同じ被験者で同じ 試行である.こちらも先で述べたように,従来知見の特徴と同様の形状変化が確 認できる.図 21(a) と図 21(b) に示すような腕を伸展させる方向へ状態が変わる ときを抜粋して比較すると,図 21(c) に示すように提案手法では運動に係る筋群 が拮抗する筋群より増加していることが確認できる. 図 15(c), 図 16(c) に示す平衡位置についても従来手法と提案手法の推定結果を 比較すると,ほぼどちらも同様の傾向にある.これは平衡位置を求める関節トル クはどちらも同様であるため,大きな差が現れなかったと考える.なお,これら の推定結果については各被験者間での個人差はあるが,他の被験者でも同様の傾 向が確認できた.こうした平衡位置を観測することにより,筋群の活動レベルで 人間がどのように運動を計画しているかを推察できる可能性がある. また被験者 5 名中 2 名において,試行の繰り返し後,運動中の剛性が全体的に減 少する傾向が確認できた.図 22 に被験者 3 の手先剛性推定結果について,1 セッ ト目と 4 セット目の試行を示す.この結果より,肩・肘の屈曲および伸展の両筋群 の活性化が,繰り返しによる学習によって減少していることが確認できた.1.2.2 節で述べた従来知見より,被験者が内部にもつ運動制御モデルが最適化されるこ とで,筋群の同時活性化が減少した可能性が考えられる.一方,試行の繰り返し により剛性が減少傾向にあった被験者についての平衡位置推定結果を図 23 に示 す.計画された平衡位置の軌道は近い傾向が確認できるが,試行ごとのばらつき などが考えられるため,平衡位置から運動の習熟を推し量ることはできなかった.−0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] X[m] Y[m] (a) 従来手法 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] X[m] Y[m] (b) 提案手法
−50
0
50
−60
−40
−20
0
20
40
60
Ky[N/m]
−0.5
0
0
0.5
0.2
0.4
0.6
0.8
1
12.5[N/m]
X[m]
Y[m]
(a) 手先剛性推定結果:1 セット目−0.5
0
0
0.5
0.2
0.4
0.6
0.8
1
12.5[N/m]
X[m]
Y[m]
(b) 手先剛性推定結果:4 セット目 図 22 無負荷の場合での手先剛性推定結果:被験者 3−0.5
0
0
0.5
0.2
0.4
0.6
0.8
1
X[m]
Y[m]
(a) 平衡位置推定結果:1 セット目0.2
0.4
0.6
0.8
1
Y[m]
5.
手先に負荷のある円軌道到達運動
本章では,3 章で述べた実験環境と実験条件下で,手先にゴムバンドによる負 荷を与えながら円軌道を描く運動による実験について述べる.手先に負荷を掛け ることで,手先に負荷の無い場合と比べて異なる筋活動となることが予想される ため,その点を提案手法による剛性と平衡位置推定を用いて評価することが可能 であるかを検証する. 図 24 負荷のある円軌道運動実験の概観5.1
実験結果
手先に負荷を掛けた場合での提案手法を用いた推定結果について,被験者 5 名 の結果を示す.図 25 − 29 に,被験者 1 − 5 における筋力,手先剛性,平衡位置 の推定結果を,試行の 1 セット目と最終セット目のある試行を示す.
図 25(a), 図 26(a), 図 27(a), 図 28(a), 図 29(a) に示す各被験者の筋力推定結果に おいて,次の傾向が確認できた. • 三角筋前部:手先位置が x 軸においてマイナス方向に動き始めるとき (時刻 0.0から 2.0[sec] の間) にピークとなる • 三角筋後部:手先が x 軸においてプラス方向に動くとき (時刻 2.0 から 4.0[sec] の間) にピークとなる • 上腕筋:手先が y 軸においてマイナス方向に動くとき (時刻 0.0 から 2.0[sec] の間) や,運動終了時の肘の伸展を止めるとき (時刻 5.0[sec] 付近) にピーク が現れる. • 上腕三頭筋外側頭:図 25(a) に示す被験者 1 は手先が y 軸においてプラス方 向に動くとき (時刻 3.0 から 4.0[sec] の間) にピークを示しているが,他の 4 名については顕著なピークは現れなかった • 上腕二頭筋長頭:図 26(a) に示す被験者 2 は手先が y 軸においてプラス方向 に動くとき (時刻 3.0 から 4.0[sec] の間) にピークを示しているが,他の 4 名 については顕著なピークは現れなかった • 上腕三頭筋長頭:どの被験者も運動中を通して顕著なピークは現れなかった 図 25(b), 図 26(b), 図 27(b), 図 28(b), 図 29(b) に示す各被験者の剛性推定結果に
• 手先が y 軸のマイナス方向に移動する直前から,平衡位置も y 軸のマイナ ス方向に移る • 手先が y 軸のマイナス方向からプラス方向へ移る際,平衡位置は y 軸のプ ラス方向に円軌道の内側に移る • 手先位置が円軌道の下方から終点に向かう際,平衡位置は終点の下方付近 に移る
2 3 4 5 6 0 5 10 15 20 25 30 t[sec] F[N] (a) 筋力推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] X[m] Y[m] (b) 手先剛性推定結果 0.2 0.4 0.6 0.8 1 Y[m]
2 3 4 5 6 0 10 20 30 40 50 t[sec] F[N] (a) 筋力推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] X[m] Y[m] (b) 手先剛性推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 X[m] Y[m] (c) 平衡位置軌道推定結果 図 26 負荷のある実験結果:被験者 2(提案手法)
2 3 4 5 6 0 10 20 30 40 50 t[sec] F[N] (a) 筋力推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] X[m] Y[m] (b) 手先剛性推定結果 0.2 0.4 0.6 0.8 1 Y[m]
2 3 4 5 6 0 10 20 30 40 50 t[sec] F[N] (a) 筋力推定結果 −0.5 0 0.5 0 0.2 0.4 0.6 0.8 1 1.2 12.5[N/m] X[m] Y[m] (b) 手先剛性推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 X[m] Y[m] (c) 平衡位置軌道推定結果 図 28 負荷のある実験結果:被験者 4(提案手法)
2 3 4 5 6 0 10 20 30 40 50 t[sec] F[N] (a) 筋力推定結果 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] X[m] Y[m] (b) 手先剛性推定結果 0.2 0.4 0.6 0.8 1 Y[m]
5.2
考察
図 30 に示す被験者 1 を例として考察する.図 30(a) と図 30(b) での手先剛性を 抜粋すると,無負荷での運動時と比べて,負荷のある運動における筋群は図 30(c) のように筋群のバランスが変化することが確認できる. 平衡位置については,無負荷時と比べて下方に移る傾向がある.これは先で述 べたように肘を屈曲させる剛性が低くなることにより,実軌道との差が大きくなっ たと考えられる. また被験者 5 名中 2 名において,試行の繰り返し後,運動中の剛性が全体的に 減少する傾向が確認できた.図 31 に被験者 3 の手先剛性推定結果について,繰り 返し前の 1 セット目と繰り返し後の 4 セット目の試行を示す.この結果より,肩・ 肘の屈曲および伸展の両筋群の活性化が,繰り返しによる学習によって減少して いることが確認できた.1.2.2 節で述べた従来知見より,被験者が内部にもつ運動 制御モデルが最適化されることで,筋群の同時活性化が減少した可能性が考えら れる.一方,手先が円軌道の上部つまり運動の開始時と終了時付近での手先剛性 は,繰り返し後に縦長になる傾向がある.手先剛性の形状はその姿勢に大きく依 存することから,運動の学習により,ゴムバンドの引張力に対抗しやすい姿勢を 伴う運動の仕方を学習した可能性が考えられる.−0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] X[m] Y[m] (a) 無負荷の場合 −0.50 0 0.5 0.2 0.4 0.6 0.8 1 12.5[N/m] X[m] Y[m] (b)負荷のある場合
−50
0
50
−60
−40
−20
0
20
40
60
Ky[N/m]
−0.5
0
0
0.5
0.2
0.4
0.6
0.8
1
12.5[N/m]
X[m]
Y[m]
(a) 手先剛性推定結果:1 セット目−0.5
0
0
0.5
0.2
0.4
0.6
0.8
1
12.5[N/m]
X[m]
Y[m]
(b) 手先剛性推定結果:4 セット目 図 31 負荷のある場合での手先剛性推定結果:被験者 36.
結言
人間が運動や環境に対する筋群の調節に着目し,筋群の協調制御による手先剛 性の推定モデルを用いた従来の運動解析手法を紹介した.従来の手先剛性推定は 筋群の協調制御による手先剛性の増減を確認できるが,主動筋群と拮抗筋群の剛 性総和を推定するために,主動筋群に対する拮抗筋群の剛性の状態を判別するこ とは出来なかった. 本論文では,従来の剛性推定を拡張することで,肩および肘の屈曲・伸展に係 る主動筋群と拮抗筋群による手先剛性をそれぞれ推定し,運動や外部環境に対し ての筋群ごとの運動解析手法を提案した.また,主働筋群と拮抗筋群の剛性が釣 り合う平衡位置を推定し,目標軌道を描く運動に対する筋活動レベルでの運動計 画の可視化を行った.提案手法の評価として水平面内での円軌道運動の被験者実 験を 2 種類行い,運動や環境に対して人が主動筋群と拮抗筋群の剛性をどのよう に設定しているかを,本手法により解析できる可能性を示した. 今後の課題は,提案手法を用いた運動スキル評価などを考えた場合,どのよう な指標により評価できるのかを示す必要がある.また,提案手法の推定モデルの パラメータとして,筋肉のモーメントアームを一定値で与えている.本来は運動 によりモーメントアームが変化するため,モデルの詳細化により推定精度が向上 すると考える.他の推定モデルのパラメータについても,特に筋肉の生理断面積 などは被験者ごとに個人差があるため,MRI を用いた被験者実験による個別のパ ラメータを計測することで,推定精度が向上すると考える.謝辞
本研究を遂行するにあたり,貴重なご指導とご助言を賜りました本研究科小笠 原司教授に深く感謝致します. 論文執筆にあたり丁寧なご検討,ご教示をいただきました杉本謙二教授に御礼 申し上げます. また本研究の遂行,論文執筆など様々な点においてご指導していただきました 本研究科の高松淳准教授に深く感謝致します. 研究全般にわたり,非常に多くのご助言,ご指導,ご協力を頂きました広島大 学の栗田雄一准教授に深く感謝致します. 本研究の遂行に当たってご助言,ご質問とともに多くの適切なご指導をいただ きました本研究科の竹村憲太郎助教に深く感謝致します. 研究全般にわたり,多くの適切なご助言とご指導いただき,ご協力頂きました 本研究科の池田篤俊助教に深く感謝致します. 本研究について的確なコメント,アドバイスをして頂きました本研究科の山口 明彦特任助教に深く感謝致します. 大学生活や事務処理など様々な面でサポートして頂きました本講座秘書の山口 美幸氏,大脇美千代氏に深く感謝致します. 本研究の遂行にあたり,様々な議論やご助言を頂いた本講座ヒューマンモデリ ンググループ博士前期課程の鈴木隆裕氏,松本真氏,武藤誠氏,グループの皆様 に深く感謝致します. また,本研究の遂行にあたり,様々な議論やご助言を頂いた先輩,同期の皆様, そして様々な補助に動いてくださった後輩達には本当にお世話になりました. 最後に,長年の学生生活を支えていただいた両親.家族,そして友人に心から 感謝致します.参考文献
[1] 黒川, 高橋, 鶴見:“理学療法 MOOK 6 運動分析”, 三輪書店 (2000).
[2] M.L.Latash: “Independent control of joint stiffness in the framework of the equilibrium-point hypothesis”, Biological Cybernetics, vol.67, no.4, pp.377– 384, 1992.
[3] T.E.Milner: “Adaptation to destabilizing dynamics by means of muscle co-contraction”, Experimental Brain Research, vol.143, no.4, pp.406–416, 2002. [4] P.L.Gribble and D.J.Ostry: “Compensation for interaction torque during single- and multijoint limb moement”, Journal of Neurophysiology, vol.82, no.5, pp.2310–2326, 1999.
[5] P.L.Gribble, L.I.Mullin, N.Cothros and A.Mattar: “Role of cocontraction in arm movement accuracy”, Journal of Neurophysiology, vol.89, no.5, pp.2396– 2405, 2002.
[6] R.Osu, D.W.Franklin, H.Kato, H.Gomi, K.Domen, T.Yoshioka and M.Kawato: “Short- and long-term changes in joint co-contraction associated with motor learning as revealed from surface emg”, Journal of Neurophysi-ology, vol.88, no.2, pp.991–1004, 2002.
[7] M.Suzuki, D.M.Shiller, P.L.Gribble and D.J.Ostry: “Relationship between cocontraction, movement kinematics and phasic muscle activity in single-joint arm movement”, Experimental Brain Research, vol.140, no.2, pp.171– 181, 2001.
[10] N.Hogan: “Adaptive control of mechanical impedance by coactivation of antagonist muscles”, IEEE Transaction on Automatic Control, vol.29, no.8, pp.681–689, 1984.
[11] T.Flash: “The control of hand equilibrium trajectories in multi-joint arm movements”, Biological Cybernetics, vol.57, no.4-5, pp.257–274, 1987. [12] M.Katayama and M.Kawato: “Learning trajectory and force control of an
ar-tificial muscle arm by parallel-hierarchical neural network model”, Advances in Neural Information Processing Systems, vol.3, pp.436–442, 1991.
[13] F.A.Mussa-Ivaldi, N.Hogan and E.Bizzi: “Neural, mechanical, and geometric factors subserving arm posture in humans”, Journal of Neuroscience, vol.5, no.10, pp.2732–2743, 1985.
[14] P.L.Gribble and D.J.Ostry: “Independent coactivation of sholder and elbow muscles”, Experimental Brain Research, vol.123, no.3, pp.355–360, 1998. [15] 辻, 後藤, 伊藤, 長町:“姿勢維持中の人間の手先インピーダンスの推定”, 計
測自動制御学会論文集, vol.30, no.3, pp.319–328, 1994.
[16] H.Gomi and M.Kawato: “Equilibrium-point control hypothesis examined by measured arm stiffness during multijoint movement”, Science, vol.272, no.5, pp.117–120, 1996.
[17] T.Flash and F.A.Mussa-Ivaldi: “Human arm stiffness characteristics during the maintenance of posture”, Experimental Brain Research, vol.82, no.2, pp.315–326, 1990.
[18] T.E.Milner and C.Cloutier: “Compensation for mechanically unstable load-ing in voluntary wrist movement”, Experimental Brain Research, vol.94, no.3, pp.522–532, 1993.
[19] 大須, 道免, 五味, 吉岡, 今水, 川人:“Changes in muscle activation during motor learning”,電子情報通信学会技術研究報告, vol.96, no.583, pp.201–208, 1997.
[20] R.E.Kearney and I.W.Hunter: “System identification of human triceps surae stretch reflex dynamics”, Experimental Brain Research, vol.54, no.1, pp.121– 132, 1984.
[21] 小池, 佐藤 誠:“表面筋電位信号からのインピーダンス推定”, 電子情報通信 学会技報, vol.102, no.157, pp.43–48, 2002.
[22] D.Shin, J.Kim and Y.Koike: “A myokinetic arm model for estimating joint torque and stiffness from emg signals during maintained posture”, Journal of Neurophysiology, vol.101, no.1, pp.387–401, 2008.
[23] C.W.Thompson and R.T.Floyd: “身体運動の機能解剖”, 医道の日本社, 2002. [24] 熊本:“二関節筋機能の機械モデルによる研究”, 日本臨床バイオメカニクス
学会誌, vol.15, pp.293–296, 1994.
[25] A.V.Hill: “The heat of shortening and the dynamic constants of muscle”, Proceedings of the Royal Society of London. Series B - Biological Sciences, vol.126, no.843, pp.136–195, 1938.
[26] H.Hatze: “A myocybernetic control model of skeletal muscle”, Biological Cybernetics, vol.25, no.2, pp.103–119, 1977.
[27] 坂口, 和田:“低い時間解像度の運動指令がもたらす手先軌道の性質 : 運動指 令表現の単純化仮説”, 電子情報通信学会論文誌, vol.91, no.9, pp.2368–2381,
[29] J.E.Wood, S.G.Meek and S.C.Jacobsen: “Quantitation of human shoulder anatomy for prosthetic arm control–ii. anatomy matrices”, Journal of Biome-chanics, vol.22, no.4, pp.309–325, 1989.
[30] M.Ikai and T.Fukunaga: “Calculation of muscle strength per unit cross-sectional area of human muscle by means of ultrasonic measurement”, Eu-ropean Journal of Applied Physiology and Occupational Physiology, vol.26, no.1, pp.26–32, 1968.
[31] D.R.Claflin and J.A.Faulkner: “The force-velocity relationship at high short-ening velocities in the soleus muscle of the rat”, Journal of Physiology, vol.411, pp.627–637 1989.
[32] Zygote: “Zygote body”, http://www.zygotebody.com/, 2012.
[33] J.Basmajiam, S.Carlsoo, M. B.Jonsson, J.Pauly and L.Sheving: “In-ternational society of electrophysiological kinesiology”, http://www. isek-online.org/, 2012.
[34] 木塚, 増田, 木竜, 佐渡山:“バイオメカニズム・ライブラリー 表面筋電図”, 東京電機大学出版, 2006.
![図 2 右上肢の筋骨格 [23]](https://thumb-ap.123doks.com/thumbv2/123deta/8543666.930532/13.892.190.694.181.613/図2右上肢の筋骨格23.webp)

![図 6 2 関節 6 筋モデル 図 7 筋肉モデル パラメータの値については表 2 に示す.x(t) は筋肉の長さ l(t) を筋肉の至適長さ r(θ 1 (t), θ 2 (t))=(肩関節 45[deg], 肘関節 90[deg] での筋肉の長さ) で割った正規化長 さ, x(t)˙ は正規化収縮速度である.なお,筋肉の長さ l(t) と筋肉の正規化収縮速 度 x(t) は以下の式で求める. l(t) = l m − A · θ 1 (t) θ 2 (t) (2) x(t) = l(t) r](https://thumb-ap.123doks.com/thumbv2/123deta/8543666.930532/18.892.198.678.184.667/モデルモデルパラメータについてθθ肩関節肘関節筋肉求める.webp)
![図 12 計測する筋肉 [32]](https://thumb-ap.123doks.com/thumbv2/123deta/8543666.930532/28.892.205.678.181.1007/図12計測する筋肉32.webp)