特集l 自動車径路誘導システム
ハードウェア・シミュレータを用いた
最適径路計算システム
古村文伸
1
.
はじめに 径路誘導システムでは各車を誘導する径路とし て,刻々変化する道路網内の混雑状況,通行規制 状況に従って目的地までの最適径路すなわち最短 時間径路をリアルタイムに計算することが必要と なる.この最短径路問題は従来ラベリング法等の アルゴリズムを用いた計算機プログラムで解かれ ていたが,ネットワークのノード数すなわち道路 網の地点数が多くなると処理時聞が急速に大きく なるという難点があった. そこでこれを解決するためわれわれは道路網を 模擬したディジタル回路網を作り,その中を伝播 する電気信号で車の走行を模擬することによっ て,最短径路を高速に探索するハードウエア・シ ミュレータを開発した. 本文ではこのハードウエア・シミュレータの原 理と構成について述べる.さらに通産省工業技術 院の大型プロジェクト「自動車総合管制技術の研 究開発J {自総管)で実施した径 路誘導パイロット実験への適用 結果を示す.2
.
最短径路問題とその従来 解法2
.
1
最短径路問題 最短径路問題は道路交通制御 のほか,輸送計画,日程計画等 こむらふみのぷ側目立製作所 19唱O 年 4 月号 3 C(1,2) 2 の数理計画問題にしばしば現われる重要な問題で ある [1 ].この問題はつぎのように定式化できる. 図 l に示すような N 個のノード {i}(i=
1, …,
N) とノードを結ぶ有向アークから成るネットワ ークを考える.アーク (i, j) には距離あるいは時 間等に相当する正のアークコスト c{i, j) が与えら れているとする.このとき問題は与えられた出発 ノード s と目的ノード e に対し,径路に沿っての アークコストの和 明 -1J
=
L
:
c{k!
,
ki+1) が最小となるノード列 {kd(i=
1, 2 ,… , m) を求め ることである.ただしん =s, km=e とする.この とき解として得られたノード列が最短径路を,ま た J が径路のコストを与える.2
.
2
ソフトウェアによる解法 最短径路問題は従来 LP , DP ,ラベリング法 等のアルゴリズムを用いて,計算機ソフトウエア により解く方法が多数開発されている.このうち N0 :
i: ノート ーーー :アーク C(i, j) : e アークコスト 一ー一 S, e 聞の最短径路 図 1 ネットワークと最短径路 (31)2
3
5
© 日本オペレーションズ・リサーチ学会. 無断複写・複製・転載を禁ず.最も一般的なものはラベリング法で,中でも基本 10' 形はつぎの古典的ラベリング法 [2J である. すべてのノード i にラベル (di, Ti) を与える. また i に入るアークの始ノードの集合を Pi とす る.このときつぎのステップにより 5 から他の全 ノードへ到る最短径路が求まる. ステップ各ノード i のラベルの初期値を
iM
件 S のとき
(s
,0
)
i=s のとき とする. ステップ 2 すべてのノード i についてmin
{Tj十 c (j,i
)
}
JePi なる j を求め,ラベルを(j,T
j+
c
(j, i)) でおきかえる. ステップ 3 すべてのノードについて第 2 ラベ ルの値が変化しなくなるまでステ ップ 2 を繰り返す. こうして得た各ノード i の第 l ラベルムは最 短径路上で z の直前にあるノードを,また第 2 ラ ベル Ti は s から i までの最短径路のコストを与 える. このアルゴリズムの計算量を見積ってみる.各 ノードに入るアークの数を平均λf とすれば,ス テッブ 2 で各ノード当り加算と比較の演算はそれ ぞれ M 回行なわれる.ノード数 N のとき l 回の ステップ 2 でNxM 回となる.またステップ 2 全体の反復回数は高々,出発ノート》冶らの最短径 路上に含まれるノード数の最大値に等しい.ネッ トワーク内のノード分布が一様であればこの最大 値は NO•5 のオーダーとなる. したがって l 出発 ノート‘から他の全ノードへの最短径路を探索する に要する計算量は NxMxNO・5=MxN1・5 に比 例する. 最短径路計算は対象ネットワーク形状,プログ ラム作成方法により同←Aアルゴリズムでも処理時 聞が変化する.ここでは l つの白安として上記ア ルゴリズムを FORTRAN プログラム化し, 自 総管パイロット実験の対象である東京の道路網 10 74SE 営紙おな(-引 L I 10-' \隊司円片/イ
/
/
10-2 ハ U S 唱i n u l 10事 103 10‘
ノード数 図 2 最短径路計算時間の比較(N=
1465) およびその一部を用いて,汎用計算機 HITAC一M160II でラ γ した結果を図 2 に示す. 一方径路誘導システムで許容される処理時聞を考 えてみる.上記パイロァト実験システムでは,272
の出発ノートーから全目的ノードへの最短径路を, 通行規制の異なる 8 つのケース (4 車種×高速道 路利用可・杏の 2 ケース)について日分以内に求 める必要がある.すなわち l 出発ノードから 1 回 当りの許容処理時聞は O. 14秒であり,これは上記 ラベリング法による処理時間の1/40程度に相当す る.古典的ラベリング法の改良としてダイクスト ラ法[2 J がある.これはノード当りのアーク数 M が N に近い密なネットワークでは処理時間短縮 に有効である.しかし道路網では λf は平均 3-4 で N に比べはるかに小さく, ラベルのソートに 要する処理のためかえって処理時聞が増える.3
.
ハードウェア・シミュレータ3
.
1
ハードウェア・シミュレータの原理 ノード数 N が増えるにつれラベリング法の処理時聞が急速に長くなる原因は,上記ステップ 2 で本来独立した各ノードについての第 2 ラベルの 加算と比較の演算をノードごとに逐次実行するこ とにある.そこでわれわれは発想を転換し,対象 ネットワークに相似な(ノードの接続関係が相等 しい)回路網を作り,その中で電気信号で交通流 を模擬することにより最短径路を高速に求めるア プローチをとった. この考え方にもとづいて新しく開発されたもの が,ハードウエア・シミュレータ[3 J である. ハードウエア・シミュレータは図 3 に示すよう に,ネットワークのノードに対応したノードモジ ュールと,アークに対応した信号線から成る.ノ ードモジュールは,ゲートとアークごとのカウン タをもっディジタル回路でつの LSI
(Large
S
c
a
l
e
Integrated
circuit) に封入される. この ハードウエア・シミュレータを用いてつぎのよう にして最短径路が求められる. 各カウンタには対応するアーグのアーグコスト の値が初期設定されている. 1 つの出発ノードに 対応するノードモジュールのゲートからパルス信 号(旅行信号とよぶ)を発する.パルス信号がカ~
Ufl:'H'H ト
出Jljj[
つ
11
: (目的ノード) 数字はカウンタ の初期値 (b) ハードウェア・シミュレータ -パルス伝矯径路 (最短径路) 図 3 ハードウエア・シミュレータの構成 1980 年 4 月号 © 日本オペレーションズ・リサーチ学会. 無断複写・複製・転載を禁ず. (33)2
3
7
ウンタに伝わると,モジュールの外部から与えら れるクロック信号によってカウンタの内容が l ず つ減少させられる.そしてカウンタの内容が O に なった時点で旅行信号が,下流に接続されたモジ ュールへ信号線を通して伝えられる.信号を受け とったモジュールは,上と同様に各アークのカウ ンタの内容の減算を開始する.それと同時にゲー トを閉め,その後他の上流側モジュールからの旅 行信号を受け付けないようにする.そしてカウン タの内容が O になると旅行信号がさらに下流側の モジュールに伝えられる. こうしてすべてのモジュールに共通のクロック 信号を用いて旅行信号の遅延と伝播を進めれば, 各モジュールへは可能な全径路のうち最もコスト の小さい径路をとった旅行信号だけが受け付けら れる.こうしてすべてのモジュールに旅行信号が 到着したならば動作を停止する.このとき各モジ ュールに記憶された先着アーク番号をたどれば, 出発ノードから他の全ノードへの最短径路が得ら れる.またモジュールにクロック信号を計数する カウンタを別途設け,旅行信号がそのそジュール に到着した時点、の値を保持させれば,これは最短 径路のコストを与える.このハードウエアシミュ レータの演算過程は,旅行信号を車の l つの集団 とみなせば,出発ノードからいっせいに走り始め た車群が,途中の各ノードで各アークに分岐し, 可能なすべての径路を走行して各ノードへの先着 を競うレースを模擬している.
3
.
2
計算の速度 、ードウエア・シミュレータにより l 出発ノー ドから他の全ノードへの最短径路を求めるに要す る時聞は,出発ノードから最も遠いノードへ旅行 信号が到達するまでの時聞に等しい.ノード数が N のとき,ノードの分布,アーグコストが一様で あればこれは NO・ 5 のオーダーに比例する.した がって処理時聞がほぼ N 1. 5 に比例するラベリン グ法によるソフトウエア解法に比べ , N が大きく なるほど有効になる.前述の東京の道路網にハー ドウエア・シミュレータを適用した時の処理時間 の推定結果を図 2 に示す.ラベリング法に比べ 10 倍ないし 100 倍程度高速である.パイロット実験 (N=1465) の l 出発ノード当りの処理時聞は要求 条件を十分満足している. ハードウエア・シミュレータによる解法をラベ リング法と比較すると,ラベリ γ グ法のステップ 2 の演算のうち,第 2 ラベルの加算をハードウエ ア・シミュレータではカウンタによる旅行信号の 遅延で,また第 2 ラベルの比較による最小値の検 出をハードウエア・シミュレータではゲートを閉 じる操作で実現している.しかもこれらの動作は 出発ノードから波紋のように伝播する旅行信号の 前線に当るノードで同時並列に行なわれる.この ようにハードウエア・シミュレータ f'Ìアークコス トを所要時間とみなし,電気信号を利用して物理 的シミュレーションを行なうことにより,ラベリ ング法のステップ 2 の逐次処理による処理時間増 加の難点を解決したものである.3
.
3
専用計算機としての位置づけ 道路網交通流を模擬するハードウエアとして従 来,ダイオード回路を用いたアナログ・シミュレ ータ([4
]など),専用ハードウエアとディジタ ル計算機を組合せたシミュレータ[5
]等がある. 前者は道路網内の最適交通流分布をネットワーク フロー問題[ 1 ]として解くものである.後者は個 々の車の動きを再現でき,信号制御効果の事前評 価等に利用されている.これに対し本ハードウエ ア・シミュレータは交通流の再現を目的とするも のではなく,最短径路を求めるために車の流れを 模擬している.したがって道路網以外のネットワ ーグの最短径路問題にも適用できる. 本ハードウエア・シミュレータの特徴として, 1000 個以上のノードモジュール LSI から構成さ れている点がある. LSI 化された演算ユニットと して最近高速フーリエ変換や浮動小数点演算を行 なうものが出現している.これらは主にマイコン と組合せ数値計算の高速化のために用いることを図 4 専用シミュレータシステム 目的としている.ハードウエア・シミュレータの ように単一の専用 LSI モジュールを多数組合せ て特定の問題を解く,大規模な専用計算機は従来 なかった.
4
.
径路誘導システムへの適用4
.
1
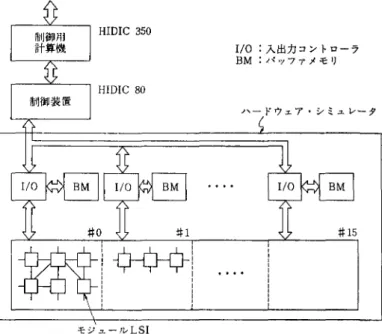
専用シミュレータシステム 自総管パイロット実験の径路誘導システム用の 最適径路計算装置として「専用シミュレータシス テム J[6
]を開発した.これは図 4 に示すように 約 1200個のそジュール LSI を用いたハードウエ ア・シミュレータ,その制御装置,制御用計算機 とから構成される. ハードウェア・シミュレータはパイロット実験 エリア内の各地点を出発ノードとして,都内の道 路網について最短時間径路を探索する.この径路 計算の入力として必要な各アークの60分先までの 予測アークコストすなわちアークの旅行時間の予 測値,および通行規制データは制御装置からセッ トされる.予測アークコストは 15分ごとの未来値 が用意され,ハードウエア・シミュレータで l 出 発ノードから径路計算を開始後 15 分, 30分, 45 分 1980 年 4 月号 モジュール LSI I!O :入出力コントローラ BM ノ〈ッファメモリ ハードウェア・シミュレータ に相当する時間だけクロックが進んだ時点で計算 をいったん停止し,各アークのカウンタの内容を 該当する時点、のアークコストに書きかえたのち計 算を再開続行する.こうすることにより未来の旅 行時間および通行規制の変化に適応した最短径路 が得られる. ハードウエア・シミュレータからは計算結果と して,各目的ノードへの最短径路について出発ノ ードからの進路(左折,直進,右折等)が出力さ れる.制御用計算機は,パイロット実験エリア内 86個の各交差点についてこの進路データを編集し てガイドテープ、ルを作る.これが各交差点の路上 機に送られ車の誘導に使われる.4
.
2
ネ'"}トワークの縮退モデル ノード数の多い広域道路網を対象としてハード ウエア・シミュレ{タを作ると,ハードウエアの 規模が大きくなり,入出力データの量および処理 時聞が増大する.そこで元のネットワークからノ ード数を減らした等価ネットワークモデルを作 り,このモデルを用いて最短径路計算を行なうハ ードウエア・シミュレータを作る必要が生ずる. このようなモデルとしてつぎの透視画法的縮退ネ (35)2
3
9
© 日本オペレーションズ・リサーチ学会. 無断複写・複製・転載を禁ず.(a) 元ネットワーク (b) 縮退ネットワーク -ノード ーーアク ゾーン境界 一一地区境界 図制御エリア -非縮退ノード 。仮想ノード 図 5 ネットワークの縮退 ットワーグモデル[7]がある. 対象道路網を誘導制御の対象となるエリアと, その周辺の径路誘導の目的地となるエリアに分け る.自総管パイロット実験では前者はパイロット 実験エリアであり,後者は残りの都内の道路網で ある.図 5 に示すように制御対象エリアを中心と して,周辺エリアの遠くのノードについては,隣 接する複数ノードを l つの仮想ノードに縮退させ る.このとき中心からの距離が大きくなるにつ れ,より多くのノードを同ーの仮想ノードに縮退 させることにより,透視画法的に粗いネットワー グが得られる. このときどれだけのノードを 1 仮想ノードに縮 退させるべきかは,元のネットワークで求めた最 短径路と縮退ネットワークで求めた最短径路との 誤差評価により判断できる.たとえば,ある出発ノ ードから周辺エリアのゾーン Z 内のノード i
(i=
1 , 2 ,… , N) へ到る最短径路の進路を li, また径路 のコストを Ti とし,縮退ネットワークでゾーン Zへ到る最短径路の進路およびコストを 1 , T と する.このときある闘値 fh , θz に対し, ~ITi-TI
ヤ一一一<fh
N
品 T7b(凶なる t の個数 )
<02
が成り立っときのみゾーン Z を縮退させればよ い.このような計算をあらかじめオフライン的に 行なうことによってネットワークモデルを作るこ とができる.パイロット実験に適用した結果, 1465 ノードの元ネットワークから 599 ノードの縮 退ネットワークが得られた.4
.
3
処理速度の評価 パイロット実験の結果,ハードウエア・シミュレ ータによる最短径路計算処理時聞は,データの入 出力処理を含め l 出発ノード当り l 回平均 0.046 秒であった. 272 出発ノード 8 車種の全ケース では 100 秒となる.これとアークコストの予測, ガイドテープル編集の処理を加えた,専用シミュ レータシステムの処理時聞は 8.5 分であり, 15分 周期のガイドテーブル更新には充分余裕があるこ とが確認できた. 5. おわりに ネットワークの最短径路問題を高速に解くため のハードウエア・シミュレータを開発し,交通流 の径路誘導システムに適用した.ハードウエア・ シミュレータは専用のモジュール LSI を 1000個 以上用いた専用計算機で,汎用ディジタル計算機 に比べ 10ないし 100倍の処理速度をもっ. 今回開発したハードウエア・シミュレータは東 京の主要道路網を模擬するもので,制御用ミニコ ンと同程度の大きさである.パイロット実験と同 様の径路誘導システムを都内全域に適用するため にはこの規模のシミュレータを数箇所の地区管制 センターに 1 つずつ設置すればよい.将来超 LSI 技術の発達により集積度の増した回路素子を使え ば,シミュレータを小型化し各交差点の路上機あるいは各車の車載装置に組込むことも可能となろ う.こうすれば最適径路計算処理を各交差点,各 車に分散でき,より迅速できめ細かな道案内,交 通流制御の道が聞かれよう. また最短径路計算をサフールーチンとして用いる ことにより解ける問題(たとえば配分問題[
8
J) , あるいは類似のネットワーク問題(たとえばネッ トワークフロー問題)向きの計算機へハードウエ ア・シミュレータを拡張することも可能である. 本文に述べた最短径路計算用ハードウエア・シ ミュレータのみならず今後他の分野においても, ますます発達する半導体技術を利用した専用計算 機で,大規模な問題を解くアプローチが有効にな ると思われる. 参芳文献 [ 1 J 関根泰次:数理計画法,岩波書店, 1978. [ 2J
S. E. Dreyfus : An Appraisal of Some Shorュtest-Path Algorithms
,
J
.
of Operations Resュearch, 17, 395-412, 1969.
[3 J 奈良,萩原:ディジタルモジューノレによる相同相 似形計算機,電気学会誌論文集, 96巻 8 号, 1976. [4
J
1
.
H. Lewer,
J
.
M. Bullingham: ElectronicSimulator Mark II for Quickest Routes in Road Network
,
Traffic Engineering and Conュtrol, 15, 558-559, 1974. [5 J 谷口忠勝,高羽禎雄:交通流、ンミュレーション・ システム TRN *SIMII を用いた車両走行のシミュ レーション,昭和51 年電気学会全国大会 1260. [6J 古村,坪井,萩原,石崎,久保:径路誘導制御用 道路網交通流専用シミュレータシステムの開発,第 16回 SICE 学術講演会 1402, 1977. [7]古村,井原:交通流制御l のための道路ネットワー グモデルの構成,昭和53年電気学会全国大会 1161. [8J オベレーションズリサーチ 1977 年 12 月号:特集 IA 法. 1980 年 4 月号 © 日本オペレーションズ・リサーチ学会. 無断複写・複製・転載を禁ず. (37)