修 士 論 文 の 和 文 要 旨
研究科・専攻 大学院 情報理工学研究科 情報・ネットワーク工学専攻 博士前期課程 氏 名 羽田野恭平 学籍番号 1931113 論 文 題 目 V-OFDM と CRV-OFDM の位相雑音補償 要 旨 OFDM 変調方式は,高レートのデータ列を低レートのデータ列に分解し複数のサブキャリ アを通して並列に送る伝送方式である.OFDM は,マルチパス環境において通信路等化が簡 単であるなどの理由で,LTE や無線 LAN,地上デジタルテレビ放送等に用いられており,更 なる次世代移動通信システムへの有力な候補とされている.しかしフェージング環境において OFDM システムは,ダイバーシティオーダーが 1 となるほか,複数のサブキャリアの和が同相で加算された場合に PAPR が大きくなるという弱点がある.Xia らの研究で,OFDM のダ
イバーシティオーダーを改善する V-OFDM,また V-OFDM の位相を回転させた CRV-OFDM
が韓らによって提案され,PAPR も改善することが示された. これらのシステムはデータを複数の周波数に分けて送信するマルチキャリア方式であるた め,周波数変動に対して弱いというデメリットを持ち,不完全な発振器において発生する位相 雑音は,出力の信号の位相をランダムに変動させてしまうので対策が必要となる。位相雑音の 影響は,OFDM においては共通位相誤差やキャリア間干渉等として現れる.同様に V-OFDM においては CVBPE と IVBCI として影響が現れ,先行研究において,その影響を補償する方 法が提案された.しかしながら,この方法では多くの計算量を必要とする.また,CRV-OFDM においては位相雑音の影響を考慮していなかった. 本研究では,V-OFDM と CRV-OFDM における位相雑音の影響を補償する方法としてカル マンフィルタを用いた位相雑音推定アルゴリズムを提案し,計算量の削減,位相雑音に対する 堅牢性,そしてビット誤り率性能を向上できることを示した.
令和
2
年度
V-OFDM
と
CRV-OFDM
の位相雑音補償
電気通信大学
情報理工学研究科
1931113
羽田野恭平
指導教員 韓 承鎬 准教授
令和
3
年
3
月
19
日
概要
Orthogonal Frequency Division Multiplexing(OFDM) 変調方式は,高レートのデータ 列を低レートのデータ列に分解し複数のサブキャリアを通して並列に送る伝送方式で ある.OFDM は,マルチパス環境において通信路等化が簡単であるなどの理由で,LTE や無線LAN,地上デジタルテレビ放送等に用いられており,更なる次世代の移動通信シ ステムへの有力な候補とされている. しかし幾つかのデメリットを持っている.フェー ジング環境においてOFDM システムは,ダイバーシティオーダーが 1 となるほか,複 数のサブキャリアの和がOFDM の信号となるため,同相で加算された場合に Peak to Average Power Ratio(PAPR) が大きくなるという弱点がある.Xia らの研究で,OFDM のダイバーシティオーダーを改善するVector-OFDM(V-OFDM),また V-OFDM の位相 を回転させたConstellation Rotated Vector-OFDM(CRV-OFDM) が韓らによって提案さ れ,PAPR も改善することが示された.
これらのシステムはデータを複数の周波数に分けて送信するマルチキャリア方式で あるため,周波数変動に対して弱いというデメリットを持ち,不完全な発振器におい て発生する位相雑音は,出力の信号の位相をランダムに変動させてしまうので対策 が必要となる.位相雑音の影響は,OFDM においては共通位相誤差 Common Phase Error(CPE) やキャリア間干渉 Inter Carrier Interference(ICI) 等として現れる.同様に V-OFDM においては Common Vector Block Phase Error(CVBPE) と Inter Vector Block Carrier Interference(IVBCI) として影響が現れ,先行研究において,その影響を補償す る方法が提案された.しかしながら,この方法では多くの計算量を必要とする.また, CRV-OFDM においては位相雑音の影響を考慮していなかった. 本研究では,V-OFDM と CRV-OFDM における位相雑音の影響を補償する方法を提案 し,計算量の削減,位相雑音に対する堅牢性,そしてビット誤り率(BER) 性能を向上 できることを示した.それぞれのパフォーマンスは,計算機シミュレーションにより 確認した.
目 次
第1 章 序論 1 第2 章 OFDM システム 3 2.1 OFDM システムモデル . . . 3 2.2 OFDM 等化器 . . . 4 第3 章 V-OFDM システム 6 3.1 V-OFDM システムモデル . . . 6 3.2 V-OFDM 等化器 . . . 8 第4 章 CRV-OFDM システム 9 4.1 CRV-OFDM システムモデル . . . 9 4.2 CRV 等化器 . . . 10 第5 章 マルチパスフェージング 11 5.1 マルチパス通信路 . . . 11 5.1.1 周波数フラットフェージング . . . 11 5.1.2 周波数選択性フェージング . . . 12 第6 章 OFDM,V-OFDM,及び CRV-OFDM における位相雑音の影響 14 6.1 位相雑音 . . . 14 6.2 ガウス位相雑音 . . . 14 6.3 ウィーナー位相雑音 . . . 15 6.4 位相雑音の存在する OFDM,V-OFDM と CRV-OFDM . . . 16 6.4.1 システムモデル . . . 16 6.4.2 位相雑音下での CRV-OFDM 受信信号 . . . 17 第7 章 ZF による位相雑音推定と位相雑音補償 19 7.1 CVBPE 補償 . . . 19 7.2 位相雑音推定 . . . 20 7.3 複雑さ減少計算 . . . 227.4 位相雑音補償 . . . 22 7.4.1 無相関化 . . . 22 7.4.2 干渉除去 . . . 24 第8 章 カルマンフィルタによる位相雑音推定 25 8.1 カルマンフィルタ . . . 25 8.1.1 概要 . . . 25 8.1.2 カルマンフィルタモデル . . . 25 8.1.3 ベクトルブロック間カルマンフィルタ . . . 28 8.2 拡張カルマンフィルタ . . . 30 8.2.1 概要 . . . 30 8.2.2 サブキャリア間カルマンフィルタ . . . 33 8.2.3 時間領域カルマンフィルタ . . . 35 第9 章 シミュレーション 37 第10 章 結論 49 付 録A カルマンフィルタの導出 50 付 録B ベクトルブロック間カルマンフィルタの導出 54 付 録C 拡張カルマンフィルタの導出 57 付 録D サブキャリア間カルマンフィルタの導出 59 参考文献 61 謝辞 64
図 目 次
2.1 GI のイメージ . . . 3 2.2 OFDM システムモデル . . . 3 3.1 V-OFDM システムモデル . . . 6 4.1 CRV-OFDM システムモデル . . . 9 5.1 フェージング環境のイメージ . . . 11 6.1 位相雑音の存在する CRV-OFDM . . . 16 7.1 パイロット VBs とヌル VBs . . . 19 9.1 位相雑音なしの BER 性能 . . . 38 9.2 位相雑音補償なし 位相雑音環境下の BER 性能 . . . 38 9.3 SNR=30, M = 2, V-OFDM BER . . . 39 9.4 SNR=30, M = 4, V-OFDM BER . . . 40 9.5 SNR=30, M = 2, CRVOFDM BER . . . 40 9.6 SNR=30, M = 4, CRVOFDM BER . . . 41 9.7 σφ=1◦,M = 4, V-OFDM . . . 42 9.8 σφ=1◦,M = 4, CRV-OFDM . . . 43 9.9 σφ=2◦,M = 4, V-OFDM . . . 43 9.10 σφ=2◦,M = 4, CRV-OFDM . . . 44 9.11 σφ=4◦,M = 4, V-OFDM . . . 44 9.12 σφ=4◦,M = 4, CRV-OFDM . . . 459.13 σφ=1.5◦,M = 4, V-OFDM と CRV-OFDM BER . . . 46
9.14 σφ=1◦, パイロット VB 長=4, 8, 16 V-OFDM . . . 47
第
1
章
序論
Orthogonal Frequency Division Multiplexing(OFDM) は狭帯域の通信路上で高レート を維持可能な伝送技術の一つである マルチパス通信路上での時間遅延による前後の信 号の干渉で発生する検出誤りを抑制するため,OFDM は Guard Interval(GI) を用いて, その影響を避ける. また,OFDM ではフーリエ変換を用いることで,マルチパスによ る遅延波の畳み込みを乗算に変え,除算での等化が可能となるので,等化が簡単であ る. これらの理由から OFDM は無線 LAN,WiMAX,LTE,地上デジタル放送など幅 広く使われている. 一方で,OFDM は幾つかのデメリットを持っている. 代表的なものとして,ダイバー シティオーダーが1 であること.また,OFDM 信号はそれぞれが独立に変調された複 数のサブキャリアの和であるために,同相で加算された場合に大きなピークが生じ, Peak to Average Power Ratio(PAPR) が高くなり,A/D,D/A 変換器が複雑になったり, 高周波電力増幅器の効率が落ちるなどの不具合が生じてしまう[1].
これらのデメリットを改善する技術として,OFDM の送受信をベクトルにすることで OFDM のデメリットの一つであるダイバーシティオーダーを改善する Vector-OFDM(V-OFDM) [2] [3] や,V-OFDM の性能を更に向上させる,Constellation Rotation を V-OFDM に加えたConstellation Rotated Vector-OFDM(CRV-OFDM) が提案された [4].シンボル の送信時にベクトルで送ること,更にそれに対して,回転を加えておくことで更に性 能を改善する技術である.これらの研究では,OFDM のダイバーシティオーダーを改 善するV-OFDM と CRV-OFDM が PAPR も改善することが示された.
しかし,これらのシステムは,高レートのデータを複数の周波数に分けて送信するマ ルチキャリア方式であるため,周波数変動に対して弱く,現実の不完全な発振器によ る位相雑音に対して,影響を受けやすい.OFDM においては位相雑音に起因して共通 位相誤差Common Phase Error(CPE) とキャリア間干渉 Inter Carrier Interference(ICI) が 発生してしまい,性能劣化を引き起こす,[5] - [8].OFDM における位相雑音補償にお いては,時間領域や周波数領域のアプローチに分けられ,多くの論文で議論されてい る[9]- [12].位相雑音はウィーナー位相雑音でモデル化され,軌道追跡に優れたカル マンフィルタが頻繁に用いられている[13] [14].一方,V-OFDM における位相雑音の 影響は,共通ベクトルブロック位相誤差Common Vector Block Phase Error(CVBPE) や
第1 章 序論
渉である.V-OFDM の Vector Block(VB) サイズが大きくなるほどその影響は大きくな り,補償が必要である[15].[16] では,パイロット VBs とヌル VBs を用いる方法で, CVBPE と IVBCI の干渉を軽減する方法が提案されたが,最大で NM × NM の逆行列 を複数回行うなど,計算量の問題がある.本論文では,V-OFDM と CRV-OFDM の位 相雑音による干渉を補償する方法として,ベクトルブロック間カルマンフィルタとサ ブキャリア間カルマンフィルタを用いた位相雑音推定手法を提案し,計算量の削減と BER 性能を改善する.計算機シミュレーションでは,V-OFDM と CRV-OFDM の性能 を従来の位相雑音補償方法と比較して低演算量かつ良いBER 性能をもつことを示す.
第
2
章
OFDM
システム
OFDM は一つのデータ系列を複数の低レートのデータ列に分解し,複数のサブキャ リアを通して並列に送るマルチキャリア伝送の一種である. 通常,デジタル伝送を行 う際に,伝送路の遅延広がりの影響でシンボル間干渉が生じ,特性劣化に繋がる.だ が,OFDM では複数のサブキャリアを通して送るため,一つのサブキャリア上のシン ボル間隔が広くなり,マルチパスによる遅れ時間は相対的に短くなることに加え,シ ンボルにガードインターバルを付加することでシンボル間干渉をほとんどなくすこと ができる. GI のイメージを以下の図 2.1 に表す. 図2.1: GI のイメージ2.1 OFDM
システムモデル
OFDM のシステムモデルは以下の図 2.2 のとおりである.第2 章 OFDM システム
2 進数情報ビットを変調した信号を ( ˜x0,˜x1, . . . ,˜xN−1) とする. OFDM における信号
はN 個のディジタル変調信号の和であるが,それごとに変調回路を並べることは非 現実的であり,Distributed Fourier Transform(DFT) を用いて変調を行う. DFT は Fast Fourier Transform(FFT) を用いて高速に計算を行うことができ,N が非常に大きい場 合でも現実的なハードウェアで処理を行うことができる. 一次変調を行ったデータを Serial/Parallel(S/P) 変換したものに Inverse FFT(IFFT) をするので,
x = F−1 N x˜T (2.1) となる. ここで,F−1 N はN 点 IFFT である.このx に対して Parallel/Serial(P/S) 変換を してGI を付加された信号 #x が送信される. この際に,マルチパス通信路を通り,通信 路係数が掛けられる. 受信機側において,通信路係数が掛けられた複数の信号の畳込み を行う. 各通信路を通過する際に各々の通信路係数がその信号の長さに対して掛けら れる. マルチパス通信路を通った信号は,畳込みの後,加法性白色雑音が付加される. マルチパスがP 本だとすると,通信路係数をhP =(h0,h1,· · · , hP−1) として,長さが N になるまで0 を挿入して #h = (h0,h1,· · · , hP−1,0P,· · · , 0N−1) とおいた場合,受信信号は #y = (#x $ #h) + #ξ. (2.2) ここで $は周期畳み込み,#ξ はAdditive White Gaussian Noise(AWGN) である.この受 信信号に対し,FFT を行う.#y = (y0,y1,· · · , yN−1) としたとき, ˜ y = FN ! y0 y1 · · · yN−1 "T (2.3) ここで,FNはN 点 FFT である.マルチパス通信路を通過しているので,受信信号 ˜y を等化をした後,復調されたものを誤り判定する. n 番目の受信信号は yn= ˜xn˜hn+ ξn (2.4) と表せる. ξnは加法性白色雑音であり,˜hnはマルチパス通信路の数をP,シンボル長 をN としたとき,通信路係数!h0,h1,· · · ,hP−1"を長さN になるまで 0 を挿入したも の#h に対して N 点 FFT を行ったものの n 番目である. ˜h =!h0 h1 · · · hp−1 0 · · · 0 " #!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!$%!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!& N FN (2.5)
2.2 OFDM
等化器
本論文では,線形等化器としてZF と MMSE 等化器,非線形等化器として ML 等化 器を採用した. FFT 後の受信信号 ˜y は,OFDM ではフーリエ変換を用いることで,マ第2 章 OFDM システム ルチパスによる遅延波の畳み込みを乗算に変え,除算での等化が可能となるので,ZF は次式で表せる. ˆ xn,ZF=' yn· ˜h ∗ n |˜hn|2 (N−1 n=0 (2.6) また,MMSE は ZF に雑音分散を合わせて考えれば良いので,雑音の分散を σ2とす ると, ˆ xn,MMSE= ' y n× ˜h∗n ˜hn× ˜h∗n+ σ2 (N−1 n=0 (2.7) と表せる. ML は,1 次変調として考えられる全ての組み合わせに対して,判定を行っ ていく. その組み合わせを仮の受信信号 ζ として,次の計算を行う. ˆ xn,ML=arg min x¥ ∈ S |yn− x| 2 (2.8) x は考え得る全ての被変調信号である.この計算を行うことで,実際の受信信号と仮 の受信信号の距離を出し,その値が最も小さいものを判定とする.
第
3
章
V-OFDM
システム
3.1 V-OFDM
システムモデル
V-OFDM は,OFDM の送受信をベクトルにして行う方式である. V-OFDM のシステ ムモデルを以下の図3.1 に示す. 図3.1: V-OFDM システムモデル M サイズの VB 数を N とした場合の 2 進数情報ビットを変調した信号が次のように 表せる. ˜XN×M = ˜x0 ˜x1 .. . ˜xN−1 = ˜x0,0 ˜x0,1 · · · ˜x0,M−1 ˜x1,0 ˜x1,1 · · · ˜x1,M−1 .. . ... . .. ... ˜xN−1,0 ˜xN−1,1 · · · ˜xN−1,M−1 (3.1) OFDM では,長さ N の被変調信号に対して N 点-IFFT を行ったが,V-OFDM ではこ のM × N の被変調信号に対し,M 回の N 点-IFFT を行っていく. 式 (2.1) の行列の列
第3 章 V-OFDM システム ごとにIFFT を行っていくことになり, F−1 N × ˜x0,0 ˜x0,1 · · · ˜x0,M−1 ˜x1,0 ˜x1,1 · · · ˜x1,M−1 .. . ... . .. ... ˜xN−1,0 ˜xN−1,1 · · · ˜xN−1,M−1 =x = x0 x1 .. . xN−1 (3.2) IFFT 後のx は P/S 変換をして,長さ M × N の行ベクトルとして送信されることになり, #x1×MN=!x0 x1 . . . xN−1" (3.3) ガードインターバルやマルチパス通信路での通信路係数の計算等はOFDM と同じで ある. マルチパスの畳み込み後,GI を除去した受信信号は以下のように表せる. #y1×MN=(y0 y1 · · · yN−1) (3.4) これがS/P 変換されて,再び N × M のベクトルになる. 受信側では,この N × M の信 号をFFT する. 受信信号yn=/yn,0 yn,1 · · · yn,M−10Tとしたとき, ˜ y = FN× y0,0 y0,1 · · · y0,M−1 y1,0 y1,1 · · · y1,M−1 .. . ... . .. ... yN−1,0 yN−1,1 · · · yN−1,M−1 (3.5) このy を等化して,復調後に判定を行う.˜ n 番目の受信は n 番目の送信にのみ影響を受けるので,n 番目の受信信号は次のよう に表せる. ˜ yn=x˜nH(n) + ˜ξn (3.6) ここでH(n) は通信路応答であり,˜ξnは加法性白色雑音である. 通信路応答H(n) は通 信路係数 ¯h を用いて以下のように表す. H(n) = U(n)diag[ ¯h(n)]U(n)H (3.7) ここで ¯h =1¯h0,¯h1,· · · ,¯hMN−12! #hFMN であり(2.5) 式より次のように表せる. ¯h =!h0 h1 · · · hP−1 0P · · · 0MN−1 " FMN (3.8)
第3 章 V-OFDM システム 上式より,¯h(n) =1¯hn,¯hN+n,· · · ,¯h(n−1)N+n2である. すなわち, ¯h の系列を N 個飛ばしで M 個のペアにし,そのペアが N 個 作られることになる. そのペアを対角行列にしたも のを,通信路推定に用いる. 例として,M = 4 の場合を以下に表す. diag[ ¯h](n) = ¯hn 0 0 0 0 ¯hn+N 0 0 0 0 ¯hn+2N 0 0 0 0 ¯hn+3N (3.9)
また,(3.7) 式のU(n) はユニタリ行列であり,U(n)HはU(n) の複素共役転置である. U(n) = √1 MΛ(n)FM (3.10) ただし, Λ(n) = diag(exp {− j2πmn/MN})M−1m=0 (3.11) である. M=1 の時は,1 × N の信号を送受信することになり,また U(n) = 1 であるの でOFDM と全く同じ構造である.
3.2 V-OFDM
等化器
V-OFDM に用いる等化器は,基本的な構成は OFDM と全く同じである. V-OFDM, では通信路応答H を用いるので,ZF は次のように表せる. ˆ xn,ZF=˜yn˜H(n)H! ˜H(n) ˜H(n)H "−1 (3.12) ここでHHはH の複素共役転置行列である. 先ほどと同様に,MMSE は ZF に雑音の 分散を考えれば良いので ˆ xn,MMSE=y˜n˜H(n)H! ˜H(n) ˜H(n)H+ σ2IM"−1 (3.13) と表せる. ここでIMはV-OFDM のシンボル長を N × M とした時の M 次元の単位行 列である. ML は ˆ xn,ML=arg min x∈S 3! ˜ yn− x ˜H(n) " ! ˜ yn− x ˜H(n) "H4 (3.14) と表せる.x は考え得るすべての被変調信号 S の中の一つである.
第
4
章
CRV-OFDM
システム
4.1 CRV-OFDM
システムモデル
CRV-OFDM は基本的な構造は V-OFDM と一緒である. V-OFDM では Λ(n) が n に依 存して,性能が悪くなった.CRV-OFDM では,送信時に,被変調信号に対し,位相回 転をかけ,受信側ではその逆回転をかけることで,n に対する依存性をなくし性能を 向上させる. CRV-OFDM のシステムモデルを以下の図 4.1 に示す. 図4.1: CRV-OFDM システムモデル 図3.1 と比較して,変化している部分が IFFT 前,FFT 後だけである. 実際の,信号 に対して行われる処理を追っていく. まずビットデータに任意の変調を施した被変調信号に対し,位相回転 Ω を加えて いく. Ω(n) ! ΘΛ(n)Hであり,また,Θ M×M ! diag[exp( jmθ)]m=0M−1である. θ の値は CRV の回転角に合わせて最適なものを選択する.本稿では,M = 2 において,23π/128 ,M = 4 ではπ/8 を採用した1. 例として,被変調信号をs とすると,n 番目の位相回転 を加えた信号は ˜ xn=snΩ(n) (4.1)
第4 章 CRV-OFDM システム となる.後は,この信号をV-OFDM 送信機を通すことになる. 受信側もまた,FFT をするところまでは一緒であり,CRV-OFDM では FFT 後に,送 信側で掛けた回転の逆回転 ΩHをかけることになる. rn=y˜nΩ(n)H (4.2) 受信ベクトルrnはn 番目の送信ベクトルによってのみ影響を受けるので次のように表 せる. rn=snH(n) + ¯ξn (4.3) このとき,通信路応答H(n) は次のとおりである. H(n) = ΘFMdiag1 ¯h(n)2 F−1MΘH (4.4)
4.2 CRV
等化器
前章において,CRV-OFDM は V-OFDM と基本構造の大半が同じであることを述べ た. 等化器も同様である. 等化においては,V-OFDM との違いは,(4.4) 式を通信路応 答として用いることであり他の点は全てV-OFDM と同じである. ZF は次のように表 せる. ˆ xn,ZF=˜yn˜H(n)H! ˜H(n) ˜H(n)H"−1 (4.5) ここでHHはH の複素共役転置行列である. MMSE は ZF に雑音の分散を考えれば良 いので ˆ xn,MMSE=y˜n˜H(n)H! ˜H(n) ˜H(n)H+ σ2IM "−1 (4.6) と表せる. ここでIMはCRV-OFDM のシンボル長を N × M とした時の M 次元の単位 行列である. ML は ˆ xn,ML=arg min x∈ S 3! ˜ yn− x ˜H(n) " ! ˜ yn− x ˜H(n) "H4 (4.7) と表せる.x は考え得るすべての被変調信号 S の中の一つである.以上より,位相回転 を加えないCRV-OFDM はすなわち,V-OFDM であり,位相回転を加えずに,M = 1 であれば,これはOFDM であることが分かる.第
5
章
マルチパスフェージング
5.1
マルチパス通信路
フェージングは,デジタル無線通信において大きな問題の一つであり,伝送速度を 制約する主要な原因の一つとなっている. アンテナから送信された電波は,様々な方向に反射しながら受信アンテナに到達する が,その過程で,電波は複数のパスに分かれて伝搬している. 受信アンテナでは,その 複数のパスを通って到来した信号の和を受信する. このような現象をマルチパスフェー ジングという. マルチパスフェージングは大きく分けて 2 種類あり,受信信号電力の減 衰を生じさせる周波数フラットフェージングと受信信号の波形歪みを生じさせる周波 数選択性フェージングがある. 図5.1: フェージング環境のイメージ5.1.1 周波数フラットフェージング
一つの送信機から送信された信号が複数のパスに分かれて受信機に到来する. 送信 から受信までの過程で通るパスは,それぞれ長さ,反射の仕方が異なる. それにより, 信号はそれぞれ異なったパスを伝搬するため,受信アンテナに届く信号はすべて位相, 振幅が異なる. その和を受信信号として受信するので,互いに打ち消し合い,受信信号 の振幅が減衰をする. これを周波数フラットフェージングという. このフェージング環 境における受信信号の振幅の変動の確率密度関数を求める.第5 章 マルチパスフェージング 受信アンテナでのベースバンド信号を次のように表すとする. y = p 5 n=1 anexp( jφn) (5.1) =XR+jXI (5.2) anは振幅で,φnは位相である.また,XR,XIはそれぞれp 本のパスの信号の実部と虚部 の和であり,p が十分に大きいとき,大数の法則により確率密度関数は Pr(XR) = 6 1 2πσ2 R exp − X2 R 2σ2 R (5.3) Pr(XI) = 61 2πσ2 I exp − X2 I 2σ2 I (5.4) で与えられる.すなわち,XR,XI の確率密度関数はガウス分布となり,σ2R,σ2I はそれ ぞれ実部及び虚部の平均電力を表す. これらが同時に発生する同時確率を考えると, XR,XIが独立の場合 Pr(X) = Pr(XR)Pr(XI) = Pr(XR) = 1 2πσ2exp −XR2+XI2 2σ2 (5.5) で表され,変数変換すると,極座標系では Pr(A,φ) = A 2πσ2 exp ' −2σA22 ( (5.6) が得られる.振幅の確率密度関数を求めるために,φ について,0 ∼ 2π で積分して, Pr(A) = A σ2exp ' −2σA22 ( (5.7) となる.よって振幅はレイリー分布に従う. 本論文ではこのレイリーフェージングを 条件として扱う.
5.1.2 周波数選択性フェージング
周波数フラットフェージングに対して,波形歪みを生じるのが周波数選択性フェー ジングである. フェージング環境下において,ある信号と,その遅延波が合成されて受 信するとき,その合成によって波形が変化してしまう. この波形の変化が波形歪みであ り,それを生じさせるフェージングが周波数選択性フェージングである.第5 章 マルチパスフェージング 波形歪みが生じた受信信号は元の信号と異なった波形になっており,周波数によって スペクトルも異なる. 高速通信は,低速通信と比べてシンボル間隔が短くなり,その結 果遅延した信号が重なると,低速通信に比べて波形が大きく歪んでしまう. 周波数選択性フェージングにおける信号の遅延量と電力の関係は遅延プロファイルと して表わせる. ある遅延 τ に到来する信号が,複数のパスをとおって 到達した複数の 信号の和であると考えると,その振幅はある平均電力のレイリー分布に従う変動をし ているものと考えられる. OFDM では伝送路による歪みを受けない程度に伝送速度を 落とし,それを補償するために複数のキャリアを用いて伝送するのでフラットフェー ジング通信路とみなされる.
第
6
章
OFDM
,
V-OFDM
,及び
CRV-OFDM
における位相雑音
の影響
6.1
位相雑音
OFDM では送信機と受信機が,正確に同じ周波数を用いている時に限りサブキャリ アは互いに直行し,周波数オフセットは直ちにキャリア間干渉として現れる. 実際の発 振器が,本来発振すべき周波数から変動した周波数成分も出力してしまい,サブキャ リアが正確に1/T の周波数間隔にならなくなるためにキャリア間干渉が生じてしまう のがOFDM における位相雑音の大きな問題点である. 位相雑音は,周波数スペクトル のサイドバンドの中心周波数の近辺に位相変化として現れる. 発振器により出力され る信号が理想的である場合, V(t) = A sin(2π fot) (6.1) と表され,A は振幅,f0は中心周波数である. 上述のように,発振器は理想的な周波数 以外の周波数成分も出力するので,上式は次のようになる. V(t) = [A + E(t)] sin (2π fot + φ(t)) (6.2) ここでE(t) は振幅変調で,φ(t) が位相変調,すなわち位相雑音を表す. 位相雑音には,フリーランニング発振器における非定常状態のウィーナー位相雑音と 位相同期回路によって制御される発振器での広義定常状態のガウス位相雑音の2 種類 のモデルが存在する.6.2
ガウス位相雑音
ガウス位相雑音は自己相関関数をもつ広義定常過程でモデル化される. ガウス位相 雑音を含む発振器出力の電力スペクトルはローレンツスペクトルとしてモデル化され,第6 章 OFDM,V-OFDM,及び CRV-OFDM における位相雑音の影響 片側スペクトルの形で以下のように表される. Ss( f ) = 2/(π fl) 1 + f2/f2 l (6.3) flは発振器信号の-3dB 帯域幅である. ただし,キャリア周波数を fcとすれば,実際に 観測される雑音スペクトルは上記の片側スペクトルを fcだけ平行移動したものとなり, 両側スペクトルの形で以下のように表される. Sd( f ) = 1/(π fl) 1 + | f − fc|2/fl2 (6.4) flは発振器の-3dB 帯域幅である. ガウス位相雑音の共分散行列 Φ の i 行 j 列 は Φ =Rθ 7 |i − j|TN8 (6.5) と表される. ここで T/N はサンプリング周期である. 長さN とすると θn= φn, n = 0, 1, . . . , N − 1 (6.6) であり,φnは(0, α2φ) の白色ガウス雑音である.
6.3
ウィーナー位相雑音
ウィーナー位相雑音は,次式のように表される. θn= θn−1+ φn, n = 0, 1, · · · , N − 1 (6.7) φnは(0,α2φ) の白色ガウス雑音である.信号の始まりが完全に同期しているとするとθn−1= 0 である.位相雑音プロセスの分散は時間インデックス n と共に線形的に増加し,それ を非定常にするが,発振器プロセス(a(n) ! ej(2π fcn+θn)) 自体は定常的であり,ローレン ツスペクトルを描く[12]. fc: キャリア周波数,β : ローレンツスペクトルの両側 3dB 帯域幅,Ts: システムのサンプル間隔 とすると, σ2φ=2πβTs (6.8) また,時間領域の相関は E[a(n)a∗(m)] = e−πβ|m−n|Ts (6.9)第6 章 OFDM,V-OFDM,及び CRV-OFDM における位相雑音の影響 ウィーナー過程においてモデル化されるウィーナー位相雑音は(6.7) 式のように前の位相 回転にガウス雑音が加わる形を取っているので,φnは独立であり,Θ = 1 θ0,θ1,· · · ,θN−1 2T は次のような共分散行列を持つ. Φ = α2φ 1 1 · · · 1 1 2 · · · 2 .. . ... . .. ... 1 2 · · · N (6.10) 本研究では,こちらの位相雑音モデルを採用した.
6.4
位相雑音の存在する
OFDM
,
V-OFDM
と
CRV-OFDM
6.4.1 システムモデル
OFDM と V-OFDM は,それぞれ M = 1 と位相回転を加えない CRV-OFDM の特殊 ケースであるので,位相雑音下での受信信号をCRV-OFDM を例として以下に記載す る. 位相雑音が存在するCRV-OFDM のシステムモデルは以下の図 6.1 のとおりである. 図6.1: 位相雑音の存在する CRV-OFDM 図6.1 のように位相雑音は通信路を通った後に付加される. 今回,マルチパスを想定 しているので,マルチパスの畳み込みが行われたあとに位相雑音が加わることになる. CRV-OFDM は,位相回転を加えない場合は V-OFDM であり,加えて M = 1 であれ ば,OFDM であるので,V-OFDM,OFDM でも同様に,通信路を通った信号に位相雑 音が付加される.
第6 章 OFDM,V-OFDM,及び CRV-OFDM における位相雑音の影響
6.4.2 位相雑音下での CRV-OFDM 受信信号
CP 削除後,位相雑音下での長さ L(N × M) の受信信号が以下のとおりである. y+=ejθ+ P−1 5 p=0 hp,x(+−p)L+e jθ+ξ +, + =0, 1, . . . , L − 1 (6.11) ejθnの掛け算の影響が受信信号に加わる.ここで,θ +は,+ 番目の受信シンボルに影 響する位相雑音である.AWGN に位相雑音が加わり,ejθ+ξ +となるが,統計的性質は ξ+と変わらない. vectorFFT 後の受信 VBs への位相雑音への影響を表すため,{y+}L−1+=0,{ejθ+}+=0L−1のq 番 目の時間領域でのVB を次のように定義する. yq= 1 yqM+0,yqM+1, . . . ,yqM+M−1 2T pq= 1 ejθqM,ejθqM+1, . . . ,ejθqM+M−12T (6.11) より受信した VBs は yqp=yq( pq (6.12) {pq}N−1q=0 の周波数領域の位相雑音係数のベクトルが以下のように与えられる. ˜ pn= N−1 5 q=0 pqe− j 2πqn N , n = 0, 1, . . . , N − 1 (6.13) 故に,{yq}q=0N−1のN 点vectorFFT は ˜ yn = N−1 5 q=0 yp qe− j 2πqn N =˜yn( ˜p0+ N−1 5 k=0,k"n ˜ yk( ˜pn−k (6.14) ここで,CRV-OFDM の送受信の関係は以下のとおりである. rn=snHn+ξn (6.15) rn=y˜nΩHn,ξn = ˜ξnΩHnである.(6.11) と (6.14) 式より,位相雑音下で次の関係を得る ˜ yn =˜p0( Hnx˜n+ N−1 5 k=0,k"n ˜ pn−k( Hkx˜k+ N−1 5 k=0 ˜ pn−k( ˜ξk =#$%&˜P0 CVBPE Hnx˜n+ N−1 5 k=0,k"n ˜Pn−kHkx˜k+ξ)n (6.16)第6 章 OFDM,V-OFDM,及び CRV-OFDM における位相雑音の影響
ここで ˜Pn =diag 9˜pn:と ξ)n ! ;N−1k=0 ˜pn−k( ξk.雑音ベクトル ξnと ξ)nは同じ統計的性質
をもつ.OFDM と V-OFDM はそれぞれ,M = 1 と位相回転を加えない CRV-OFDM の 特殊なケースであるので,(6.16) は,OFDM であれば受信信号はサブキャリア毎にな り,共通位相誤差CPE と,他のサブキャリアからのキャリア間干渉 ICI が発生するこ ととなる.また,V-OFDM では,通信路行列に (3.7) 式を適用し,送信時の位相回転, 受信時の位相逆回転をかけない場合に等しい.CRV-OFDM と V-OFDM では,CVBPE とIVBCI の影響が位相雑音によって引き起こされている.
第
7
章
ZF
による位相雑音推定と位相雑
音補償
V-OFDM での位相雑音補償は [16] によって,行われていたが,CRV-OFDM におい て未検討であり,この章ではCRV-OFDM における位相雑音補償を考える.(6.16) 式 で表したように,CRV-OFDM には位相雑音下において CVBPE と IVBCI という干渉 が入ってくる.CVBPE は受信するベクトルブロック間に共通の位相誤差であり,こ の影響を考慮することはIVBCI の影響を緩和する入り口になる.そこで,まずはじめ にCVBPE の影響を取り除く必要がある.この章では,受信機での完全なチャネル状 態情報の場合について考察する.
7.1 CVBPE
補償
OFDM で CPE を推定するには,パイロットシンボルを使用する必要がある.CRV-OFDM においても同様に,CVBPE はパイロット VBs の使用を通して推定される.図 7.1 は,CVBPE 推定のための M サイズ VB を N 個での CRV-OFDM シンボルにおけ るVBs の配置を示す.パイロット VBs は,N の方向に沿って均等に配置されている. また,N 方向に沿って均等に分布しているヌル VBs もある.これらのヌル VBs は, IVBCI に雑音が加わったものを推定するために使用される残りの VBs は,ペイロー ドデータを搬送するデータVBs である.パイロット VBs の集合を表すために Spを,第7 章 ZF による位相雑音推定と位相雑音補償 ヌルVBs を表すために Snを,そしてデータVBs の集合を表すために Sdを用いる. CVBPE を推定するために,式 (6.16) より,以下の最適化問題を解く必要がある. ˆP0 =arg min ˜P0 5 n∈Sp << <˜yn− ˜P0Hnx˜n<<<2 (7.1) この問題の解決策は次式によって与えられることがわかる [ ˆP0]i= ; n∈Sp[Hnx˜n]∗i/˜yn 0 i ; n∈Sp|[Hnx˜n]i|2 , i = 0, 1, . . . , M − 1 (7.2) ここで[P0]iは行列P0のi 番目の対角要素を示す. (7.2) 式から ˆP0が得られ,ZF もしくは LMMSE 等化器が CVBPE 補正に適用される. ZF 等化器が使われた場合,送信された VBs は次式から得られる. ˘ xn=H−1n ˆP−10 y˜n (7.3) LMMSE 等化器の場合,まずvn ! IVBCIn+ ˜ξ)n を定義し,vn ∼CN(0, Σvn) と推測す る.ここで Σvnは対角行列で,i 番目の対角要素は以下のヌル VBs を使うことで計算 できる. /Σ vn 0 i= 1 Nn 5 n∈Sn == =/˜yn0i===2 (7.4) ここでNnはヌルVBs の集合の基数で Sn. 送信されたシンボルの LMMSE 等化は次式 より得られる. ˘ xn= ΘFM 7 ˆP0ΘFM˜Hn+ ΣvnˆP −H 0 ΘFM˜H−Hn 8−1 ˜ yn (7.5) (4.4) 式で与えられたHnの分解を使った.
7.2
位相雑音推定
位相雑音推定を始めるために,(6.16) 式の {˜xn}n=0N−1を7 章で得られるハード決定シン ボル{˘xn}n=0N−1で置き換え,より簡易な式として ˜ y =1>˜y0?T,>˜y1?T, . . . ,>˜yN−1?T 2T = ˆS0 ˆSN−1 · · · ˆS1 ˆS1 ˆS0 · · · ˆS2 .. . ... . .. ... ˆSN−1 ˆSN−2 · · · ˆS0 #!!!!!!!!!!!!!!!!!!!!!!!!!$%!!!!!!!!!!!!!!!!!!!!!!!!!& ! ˆΩS ˜ p0 ˜ p1 .. . ˜ pN−1 #!$%!& ! ˜p + w) 0 w) 1 .. . w) N−1 #!$%!& !w) (7.6)第7 章 ZF による位相雑音推定と位相雑音補償 ここで,準行列のそれぞれは,ˆSn!diag{Hnx˘n}. ˆΩs はブロック巡回行列である.(7.6) 式から,位相雑音系列˜p の ML 推定は次式で与えられる. ˆ p = arg min ˜ p *˜y − ˆΩS˜p*2 (7.7) この解は次式の通りである. ˆ p = ˆΩ−1 S y˜ (7.8) 位相雑音の相関とAWGN(σ2) が既知なら,LMMSE が位相雑音推定に次式のように適 用できる. ˆ p = Σp˜y˜ Σ−1y˜y˜ y (7.9) ここで
Σ˜y˜y! E[˜y(˜y)H] = ˆΩSΣ˜pˆΩHS + σ2I Σ˜p˜y! E[˜p(˜y)H]
また,Σ˜p! E[˜p˜pH] は周波数領域の位相雑音の相関である.(6.13) 式の等式の集合を以 下のように表す. p = √1 N¯F H NM˜p (7.10) ここで ¯FNMはNM × NM の行列として次のように定義される. ¯FNM! √1 N IM IM · · · IM IM ej2π1NIM · · · ej2πN−1N IM .. . ... . .. ... IM ej2πN−1N IM · · · ej2π(N−1)2N IM (7.11) したがって Σ˜p= E[˜p˜pH] = 1 N¯F H NME[p(p)H] ¯FNM = 1 N¯F H NMΣp¯FNM (7.12) Σpは位相雑音の時間領域相関行列であり,まとめると F G
第7 章 ZF による位相雑音推定と位相雑音補償
7.3
複雑さ減少計算
ML と LMMSE 位相雑音推定の両方は,NM × NM 行列 ˆΩSの 逆数を計算しなければ ならず,(O((NM)3)) の複雑さになり,もし N × M が大きい場合とても複雑である. ˆΩS のBCM 構造を利用することによって, ˆΩSの逆数の計算が単純化出来る. ˆΩSはBCM であり,逆数が ˆΩ−1 S = ¯FHNMˆΞ−1S ¯FNM (7.14) のように計算される.ここで ¯FNMは(7.11) 式で定義され,ˆΞSは対角行列であり,対角 のk 番目のサブブロック (k = 0, 1, . . . , N − 1) は次のように計算できる. ˆΞSk = N−1 5 n=0 ˆSne2π j kn N (7.15) 一方,(7.13) の LMMSE 推定は次の形に単純化できる. ˆ p =3I −1I + σ−2Σp ˆΩ˜ H S ˆΩS 2−14ˆΩ−1 S y˜ = 3 I −1I + σ−2Σp ¯F˜ H NMQ ¯FNM 2−14 ¯FH NMˆΞ−1S ¯FNMy˜ = I − ¯FHNMQ−1 ' Q−1+σ−2 N Σp (−1 ˆΞ−1P ¯FNM˜y (7.16) ここでQ ! ˆΞHS ˆΞS.LMMSE 推定は ML 推定に対して追加の (3L3+L2log 2N + 2L2)/2 の複素乗算及び3L3+L2log2N + L2+2L の複素加算を必要とする.7.4
位相雑音補償
前章で推定した位相雑音を用い,2 つの位相雑音補償アプローチを行う.それらは 無相関化と除去と呼ばれている[11].7.4.1 無相関化
式(6.16) の位相雑音 9˜pn:n=0N−1を前章で得られた推定値 9ˆpn:N−1n=0 で置き換えることによ り,式(6.16) を書き換えることができる.第7 章 ZF による位相雑音推定と位相雑音補償 ˜ y = ˆP0 ˆPN−1 · · · ˆP1 ˆP1 ˆP0 · · · ˆP2 .. . ... . .. ... ˆPN−1 ˆPN−2 · · · ˆP0 #!!!!!!!!!!!!!!!!!!!!!!!!!!$%!!!!!!!!!!!!!!!!!!!!!!!!!!& ! ˆΩP s0 s1 .. . sN−1 #$%& !s + ξ)0 ξ)1 .. . ξ)N−1 #!$%!& =ξ) (7.17) ˆΩSと同様に,ˆΩPもまたBCM であり,そのサブ行列のすべてが対角であり,ˆPn =diag 9ˆpn: である. (7.17) 式より,s は s = H ˜x (7.18) ここでx = [xT0,xT1, . . . ,xTN−1]Tで,H は Hnと違い,n に依存しない NM × NM のブロッ ク対角行列で H ! diag {H0,H1, . . . ,HN−1} (7.19) と定義される.ZF 等化の場合,推定データは ˆ x = H−1ˆΩ−1 P ˜y (7.20) BCM 構造に着目することで無相関化の複雑さを大幅に減らすことができる.この場 合, ˆΩPの逆行列は次式で与えられる. ˆΩ−1 P = ¯FHNMˆΞ−1P ¯FNM (7.21) ここで, ˆΞPは対角行列で,対角成分のk 番目のブロックは$ ˆΞPk = N−1 5 n=0 ˆ Pne2π jknN (7.22) Hnが(4.4) と書き表せることに着目し, ˜Hnは対角行列であり,H−1の計算は大幅に簡 易化できる. もしLMMSE 等化が使われたら,推定するデータは ˆ x = ( ˆΩPH)H[ ˆΩPH( ˆΩPH)H+ σ2I]−1˜y (7.23) (7.21) 式を使って,ˆxは次のように表現できる F G−1
第7 章 ZF による位相雑音推定と位相雑音補償 ここで,˜H はブロック対角行列で,H = ΘFNM˜HF−1 NMΘHであるように,˜H ! diag( ˜H0, ˜H1, . . . , ˜HN−1).
7.4.2 干渉除去
BCM 構造を使用して計算を単純化することができるが,無相関化補償には NM × NM の 行列 ˆΩPの逆行列の計算が依然として必要である.L × L 行列の逆行列の計算を回避す るために,以下に説明される干渉除去使用することができる. 次の形式で(6.16) を書き換える. ˜ y = (In⊗ ˆP0)H ˘x + ˆΩ(1)S ˆp(1)+ξ) (7.24) ここでH ˜x は (7.18) 式で定義され, ˆΩ(1)S 行列は最初のブロック列が削除された(7.6) 式 の ˆΩSに等しく,ˆp(1)は最初のサブベクトルが削除され,ˆpnが置換された(7.6) 式のベク トル˜p の推定に等しい. CVBPE 補償で得られた ˘xnを用いて ˆΩ(1)S を構築すると,干渉除去は以下のように実 行できる. ` y = ˜y − ˆΩ(1)S ˆp(1) (7.25) 式(7.24) の (In⊗ ˆP0)H がブロック対角構造を有することに着目すると,ベクトル `y をNVBs に分割することができる.もし `y の n 番目の VB を `ynと表すと,`ynは次の ように書くことができる. ` yn= ˆP0Hnx˘n+w)n. (7.26) ZF 等化の場合,推定データは ˆ xn=H−1n ˆP−10 y`n (7.27) (4.4) に示すようなHnの構造を使用することによって,(7.27) を計算するときに,完 全なNM × NM 行列の逆行列を計算する必要がないことが分かる. 一方,LMMSE 等化が使用される場合,推定データは以下によって与えられる. ˆ xn=( ˆP0Hn)H[( ˆP0Hn)( ˆP0Hn)H+ σ2I]−1y`n第
8
章
カルマンフィルタによる位相雑
音推定
8.1
カルマンフィルタ
8.1.1 概要
カルマンフィルタは適応フィルタの一種であり,カルマンフィルタ理論では,状態 方程式は信号生成過程の変遷をモデル化し,観測方程式は信号を劣化させるチャネル の歪みや付加的雑音をモデル化する[17]. 適応フィルタは,再帰的な信号またはパラメータ推定手法の一種で,チャネル等化, エコーキャンセル,雑音低減,GPS,ビームフォーミング,オーディオコーディング, ビデオコーディングなどの多くの信号処理や通信システムで使用されている. 適応フィルタは,フィルタ出力信号とターゲット信号との間の平均二乗誤差を最小 化することで,雑音の多い信号や隠れたパラメータを推定するという原理に基づいて 動作する. カルマンフィルタは線形システムに適応するもので,非線形システムには適応できな い.非線形遷移関数や観測関数への拡張をしたもので,拡張カルマンフィルタがある. 適応型線形フィルタは,フィルタリングまたは推定操作により,入力から目的の信 号またはパラメータを抽出することができるという原理に基づいて動作する.フィル タパラメータの適応は,目的関数を最小化することに基づいて行われる.8.1.2 カルマンフィルタモデル
カルマンフィルタはベイズ的最小二乗誤差法であり,チャネルを介した伝送で歪ん だ信号やパラメータベクトルを推定し,雑音の中で観測するための手法である.カル マンフィルタは,時間的に変化するプロセスだけでなく,時間的に不変なプロセスに第8 章 カルマンフィルタによる位相雑音推定
ロ平均ガウス・マルコフ過程であると仮定し,雑音は平均ゼロの独立同一分布(IID) ガ ウス過程であると仮定する.
信号ベクトルx(n) と雑音が含まれる観測ベクトル y(n) に対して,状態過程モデルと 観測モデルを記述する方程式は次のように定義される.
x(n) = Ax(n − 1) + Bu(n) + e(n) (8.1) y(n) = Hx(n) + n(n) (8.2) ここで状態方程式におけるx(n) は時刻 m における状態ベクトル,A は状態遷移行列 ,B はプロセス制御行列,u(n) は制御入力,e(n) は状態にかかるガウス雑音. また,y(n) は雑音で歪んだ観測ベクトル,H は通信路行列,n(n) は観測雑音ベクトル で,正規(ガウス) 過程 p (n(n)) ∼N(0, R).Q,R はそれぞれ e(n),n(n) の共分散行列 で ある. 通信の信号処理においては,外部制御入力ベクトルu(n) がないことが多く,カルマ ン方程式は x(n) = Ax(n − 1) + e(n) (8.3) y(n) = Hx(n) + n(n) (8.4) と表せる.(8.2) 式における一般的なカルマンフィルタアルゴリズムを Box1 に記述さ れる.本章では,観測m − i に基づく y(n) の予測を表すために,ˆy(m|m − i) という表記を 用いることにする.カルマンフィルタアルゴリズムの詳細な導出は付録A に添付した.
第8 章 カルマンフィルタによる位相雑音推定 Box 1 - カルマンフィルタアルゴリズム ! " 入力:観測行列 {y(n)} 出力:状態 or 信号ベクトルの推定 {ˆx(n)} 初期条件 予測誤差共分散行列: P(0| − 1) = δI (8.5) 予測: ˆ x(0| − 1) = 0 (8.6) For m = 0, 1, . . .
時間の更新, Process Prediction Equations 状態ベクトル予測: ˆ x(n|n − 1) = Aˆx(n − 1) (8.7) 予測誤差の共分散行列: P(n|n − 1) = AP(n − 1)AT+Q (8.8) 観測の更新, Estimation Equations カルマンゲインベクトル: K(n) = P(n|n − 1)HT(HP(n|n − 1)HT+R)−1 (8.9) 状態ベクトル推定: ˆ x(n) = ˆx(n|n − 1) + K(n) (y(n) − Hˆx(n|n − 1)) (8.10) 推定誤差の共分散行列: P(n) = [I − KH] P(n|n − 1) (8.11) # $
第8 章 カルマンフィルタによる位相雑音推定
8.1.3 ベクトルブロック間カルマンフィルタ
前章では,パイロットVBs とヌル VBs を用いて位相雑音による CVBPE と IVBCI の影響の低減を考えたが,MN × MN の逆行列の計算をするなどの問題があった.こ の章では,ベクトルブロック間に共通のCVBPE に焦点をあて,パイロット VBs 間で のカルマンフィルタの適用を考える.まず(6.16) 式の受信信号を変形する. CVBPE は,C0(n) = diag 9p0(n): であったが,列ベクトルに変形する. C) 0(n) = 9p0(n): = 1 ejθ0×M,ejθ0×M+1,ejθ0×M+M−12T (8.12) また,送信するパイロットVBs をx として H)=diag {H(n)x(n)} (8.13) と定義する.CVBPE はベクトルブロック間に共通であることより,状態空間モデル, 観測ベクトルはそれぞれ以下のとおりである. C) 0(n) =C)0(n − 1) (8.14) y(n) =H)(n)C) 0(n) +n(n) (8.15) ここでn(n) はIVBCI+AWGN であり,n(n) の分散 R は IVBCI+AWGN の分散である. パイロットVBs 間で,カルマンフィルタを更新し,CVBPE 予測誤差を小さくしてい く.ベクトルブロック間カルマンフィルタアルゴリズムをBox2 に記載する.詳細な 導出は付録B に添付する. CVBPE 推定におけるカルマンフィルタを用いたアルゴリズムは Box2 にまとめら れる.第8 章 カルマンフィルタによる位相雑音推定 Box2 - ベクトルブロック間カルマンフィルタアルゴリズム ! " 状態空間モデル,観測ベクトル C) 0(n) =C)0(n − 1) (8.16) y(n) = diag {H(n)x(n)} C) 0(n) +n(n) (8.17) =H)(n)C)0(n) +n(n) (8.18) ここでn は IVBCI と AWGN の影響を組み合わせた観測雑音ベクトル.IVBCI の 分散はπNM3 βTsである.
初期条件
予測誤差共分散行列
P(0| − 1) = δI (8.19) CVBPE の MMSE 推定を初期値に扱うことが可能である.予測 CVBPE
ˆ
C0)(n = 0) =0 (8.20)
n = 0, 1, . . . , N − 1
時間の更新:Process Prediction Equations 予測CVBPE ˆ C0)(n|n − 1) = ˆC0)(n − 1) (8.21) 予測誤差の共分散行列 P(n|n − 1) = P(n − 1) (8.22) 観測の更新:Estimation Equations カルマンゲイン K(n) = P(n|n − 1)H)(n)H1H)(n)P(n|n − 1)H)(n)H+R2−1 (8.23) =P(n − 1)H)(n)H1H)(n)P(n − 1)H)(n)H+R2−1 (8.24) R は AWGN と IVBCI の雑音の共分散行列 CVBPE 推定 ˆ C0)(n) = ˆC0)(n|n − 1) + K(n)!y(n) − H)(n) ˆC0)(n|n − 1)" (8.25) = ˆC0)(n − 1) + K(n)!y(n) − H)(n) ˆC0)(n − 1)" (8.26) 推定誤差の共分散行列
第8 章 カルマンフィルタによる位相雑音推定
8.2
拡張カルマンフィルタ
8.2.1 概要
カルマンフィルタは線形システムにおける適応フィルタの一種であり,非線形なシス テムでは扱うことができない.そこで,状態関数 f (·) と観測関数 h(·) が非線形である 場合のために 拡張カルマンフィルタ(Extended Kalman Filter:EKF) が開発されている. 非線形状態・観測方程式の一般的な式は次のように表せる. x(n) = f (x(n − 1)) + e(n) (8.28) y(n) = h (x(n)) + n(n) (8.29) ここで f (·) は状態変数 x(n) の変化の既知の非線形モデルであり,h(·) は観測値 y(n) の 既知の非線形モデルである. テイラー級数展開を用いて,非線形状態遷移関数 f (x(n − 1)) は,点 a での部分導関 数の観点から表され,テイラー級数を1 次部分微分項で切り詰めると,(8.28) 式の近似 線形化した式が得られる.
x(n) ≈ f (a) + ∇ f (a)(x(n − 1) − a) + e(n) (8.30) ここで∇ f (a) は,ヤコビアン行列で ∇ f (a) =∂f (x) ∂x |x=a.これは x = a での f (x) の入 力に対する出力の一次偏微分の行列である. 式(8.30) において,関数 f (a) は状態ベクトルˆx(n − 1) の最新の更新した推定値で評 価される. x(n) ≈ f (ˆx(n − 1)) + ∇ f (ˆx(n − 1))(x(n − 1) − ˆx(n − 1)) + e(n) (8.31) (8.31) 式は次のように書き換えられる. x(n) − f (ˆx(n − 1)) #!!!!!!!!!!!!!!!!!!$%!!!!!!!!!!!!!!!!!!& m での状態予測誤差; ˜x(n|n−1) ≈ A (x(n − 1) − ˆx(n − 1))#!!!!!!!!!!!!!!!!!!!!!$%!!!!!!!!!!!!!!!!!!!!!& m−1 での状態予測誤差; ˜x(n−1) +e(n) (8.32) ここで A は次のように定義されるヤコビアン行列で A = ∇ f (ˆx(n − 1)) = ∂f (ˆ∂x(n − 1)ˆx(n − 1)) (8.33)
第8 章 カルマンフィルタによる位相雑音推定 (8.32) 式から,予測誤差ベクトルの共分散行列と推定誤差ベクトルの関係が導き出せ る.状態の予測と同様に,観測の予測は,最初の項で切り捨てられたh ( f (x(n))) のテ イラー級数展開を用いて線形化することができる. 拡張カルマンフィルタのアルゴリズムをBox3 に示し,詳細な導出は付録 C に添付 する.Box1 の線形カルマンフィルタとの主な違いは,遷移行列A と観測行列 H が テイラー展開を用いて,近似線形化され,状態予測はx(n|n − 1) = f ˆx(n − 1),更新ˆ はy(n) − h (ˆx(n|n − 1)) としてそれぞれ計算される点である.
第8 章 カルマンフィルタによる位相雑音推定 Box 3 - Extended Kalman Filter Algorithm
! " 入力:観測ベクトル {y(n)} 出力:状態 or 信号ベクトル {ˆx(n)} 初期条件 予測誤差共分散行列 P(0| − 1) = δI (8.34) 予測信号 ˆ x(0| − 1) = 0 (8.35) For m = 0, 1, . . .
時間の更新, Process Prediction Equations 線形状態遷移行列モデル A =∂f (x(n − 1))ˆ ∂ˆx(n − 1) (8.36) 状態予測方程式 ˆ x(n|n − 1) = f (ˆx(n − 1)) (8.37) 予測誤差の共分散行列 P(n|n − 1) = AP(n − 1)AT+Q (8.38) 観測の更新, Estimation Equations 線形観測チャネル行列モデル H(n) =∂h ( f (x(n − 1)))ˆ ∂f (x(n − 1))ˆ = ∂h (x(n|n − 1))ˆ ∂ˆx(n|n − 1) (8.39) カルマンゲインベクトル K(n) = P(n|n − 1)HT(n)(H(n)P(n|n − 1)HT(n) +R)−1 (8.40) 状態更新 ˆ x(n) = ˆx(n|n − 1) + K(n) (y(n) − h (ˆx(n|n − 1))) (8.41) 推定誤差の共分散行列: P(n) = [I − K(n)H(n)] P(n|n − 1) (8.42) # $
第8 章 カルマンフィルタによる位相雑音推定
8.2.2 サブキャリア間カルマンフィルタ
隣り合うサブキャリア間の位相雑音はガウスマルコフ過程であり,パイロットVBs のサブキャリア間においてカルマンフィルタを適用する場合を検討する. 拡張カルマンフィルタを用いた推定ではチャネルはゆっくりとした時間変化をして いると仮定している為,1 つの (CR)VOFDM フレーム上での送信中に,時変チャネルの インパルス応答は準静的であると近似することができる.したがって,位相オフセッ トは,フレームの間に一定であると考えられる. 状態空間モデル θn,m= θn,m−1+ φn,m (8.43) 観測ベクトル yn=diag {H(n)x(n)} C)0(n) +n(n) (8.44) =H)(n)C)0(n) +n(n) (8.45) C) 0(n) はCVBPE であり,x はパイロット VBs であるので,M = 2 の場合の,最初の観 測パイロットVB は次のように表せる. yy01 = h0 h0 01 e jθ0 ejθ1 + nn01 (8.46) ゆえに,受信VB 内のサブキャリアに以下の関係が成り立つ. yn=hnejθn+nn (8.47) ynとθnが非線形関係にあるのでθnを効率的に推定するために1 次テイラー展開を用い て近似線形関係を構築する. y ≈ f (ˆθ(n − 1)) + ∇ f!ˆθ(n − 1)" 1θ(n) − ˆθ(n − 1)2+n(n) (8.48) 変形して, y(n) − f (ˆθ(n − 1)) #!!!!!!!!!!!!!!!!$%!!!!!!!!!!!!!!!!& 更新信号 ≈ ∇ f!ˆθ(n − 1)" 1θ(n) − ˆθ(n − 1)2 #!!!!!!!!!!!!!!$%!!!!!!!!!!!!!!& 予測誤差 +n(n) (8.49) ここで, H = ∇ f!ˆθ(n − 1)" (8.50) ∂f!ˆθ(n − 1)" jθ第8 章 カルマンフィルタによる位相雑音推定 この式を用い,カルマンフィルタアルゴリズムを行う.サブキャリア間カルマンフィ ルタアルゴリズムの詳細な導出は付録D で行う.アルゴリズムを Box4 に記す. Box 4 - サブキャリア間カルマンフィルタアルゴリズム ! " 入力:観測ベクトル {y} 出力:状態 {θ} 初期条件 予測誤差 P(0| − 1) = 0 (8.52) 推定値 ˆθ(0| − 1) : argOejˆθ0P (8.53) ejˆθ0はCVBPE の推定値 n = 0, 1, . . . , N − 1(N は VB サイズ) 時間の更新,Process Prediction Equations 近似線形化観測チャネルモデル H(n) =∂f!ˆθ(n − 1) " ∂ˆθ(n − 1) =jhne jθn (8.54) カルマンゲイン K(n) = P(n|n − 1)H∗(n) (HP(n|n − 1)H∗(n) + R) (8.55) 状態更新 ˆθ(n) = ˆθ(n − 1) + K(n)!H ˜θ(n|n − 1) + n(n)" (8.56) 推定誤差の共分散 P(n) = (1 − K(n)H(n)) P(n|n − 1) (8.57) # $ パイロットVB 内のサブキャリア間カルマンフィルタを更新し終えたら,次のパイロッ トVB でも同様の動作を繰り返す.最終的に得られた推定値 θnの平均値を取り,それ をCVBPE の推定値とする.
第8 章 カルマンフィルタによる位相雑音推定
8.2.3 時間領域カルマンフィルタ
従来の方法では,ZF を用いた CVBPE 補償を行い,そこから位相雑音の推定を行っ ていた.推定した位相雑音を用いて位相雑音の無相関もしくは除去を行い,IVBCI 補 償を行っていたが,その計算量は最大O((MN)3) であり,計算量が問題となっていた. この節では,前節までに紹介した周波数領域でのカルマンフィルタに加えて,時間 領域でのカルマンフィルタの適用を考え,計算量の削減と位相雑音推定精度の向上を 図る. 前章までに紹介したように,ZF を用いた CVBPE 補償と周波数領域でのカルマン フィルタを用いてCVBPE 補償を行った推定信号を得ることができる.この信号を ˆx とすると,時間領域で畳み込みを行った信号 ˆζ について,次の式が成り立つ. ˆζ = ( ˆx $ h) (8.58) 元の時間領域の受信信号y は, y = (x $ h)ejθ+wejθ (8.59) = ζejθ+wejθ (8.60) である.(8.58) と (8.60) 式を用いて,時間領域でのカルマンフィルタを考える. 位相雑音と受信信号は非線形関係にあるのでここでは拡張カルマンフィルタを適用 する.時間領域拡張カルマンフィルタはスカラーでの計算となり,従来の方法の計算 量を大幅に削減することができる. 時間領域拡張カルマンフィルタによって位相雑音を推定し,推定した位相雑音の逆 回転を実際の受信信号に対して掛けることで,位相雑音を除去した受信信号を得るこ とが出来る. 時間領域カルマンフィルタのアルゴリズムをBox5 に記す.第8 章 カルマンフィルタによる位相雑音推定 Box5 - 時間領域カルマンフィルタアルゴリズム ! " 状態空間モデル θ+= θ+−1+ φ+ (8.61) 観測方程式 y+ = ζ+ejθ++wejθ+ (8.62) 初期条件 予測誤差 P(0| − 1) = 0 (8.63) 推定値 ˆθ(0| − 1) : argOejˆθ0P (8.64) ejˆθ0はCVBPE の推定値 + =0, 1, . . . , NM − 1
時間の更新,Process Prediction Equations 近似線形化観測チャネルモデル H+ = ∂f!ˆθ+−1 " ∂ˆθ+−1 = jˆζ+ejˆθ+ (8.65) カルマンゲイン K+ = P(n|n − 1)H ∗ + ! H+P(n|n − 1)H+∗+R " (8.66) 状態更新 ˆθ+= ˆθ+−1+K+ ! H ˜θ(+|+ − 1) + w+ " (8.67) 推定誤差の共分散 P+ =(1 − K+H+) P(+|+ − 1) (8.68) # $
第
9
章
シミュレーション
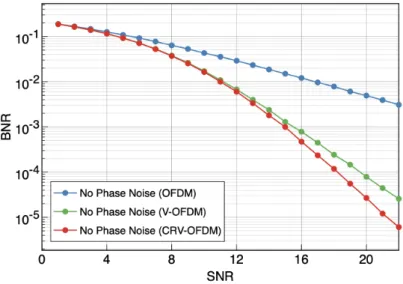
本章では,V-OFDM と CRV-OFDM のそれぞれのシステムモデルに対して,ウィー ナー位相雑音の元でのビット誤り率及び位相雑音に対する堅牢性の測定を行う. それぞ れのシステムとの比較として,OFDM についてのシミュレーションも行う.位相雑音 の補償方法としては,CVBPE 補償と位相雑音の無相関化,干渉除去,そしてベクトル ブロック間カルマンフィルタ,サブキャリア間カルマンフィルタを扱う.表9.1 にシ ミュレーション諸元を示す.ただし,位相雑音の強度においてはIEEE 802.11a の標準 値として ∆f3db∈ {70 ∼ 400}Hz を採用し,位相雑音における影響を十分に考慮するた めに,10 ∼ 800Hz でシミュレーションを行う.また,通信路は指数分布である電力遅 延プロファイルをもつマルチパスレイリーフェージングを扱う. 表9.1: シミュレーション諸元 パラメータ 条件 M 2, 4 CRV-OFDM の θ 23π/128, π/8 シンボル長 256 マルチパス数 8 ガードインターバル長 16 変調方式 QPSK パイロットVB 数 4, 8, 16 σφ 1◦,1.5◦,2◦,4◦,6◦ 位相雑音3dB 帯域幅 ∆ f3db 10∼800Hz 上記の条件のもとで行ったシミュレーションを行った.まず,位相雑音がない状態 でのBER 性能を比較した.結果は図 9.1 のとおりである.第9 章 シミュレーション
図9.1: 位相雑音なしの BER 性能
位相雑音がない場合では,V-OFDM と CRV-OFDM が OFDM に比べて性能が高く, VB を用いる有用性が分かった.また,V-OFDM に比べて CRV-OFDM は線形等化器 における性能が高く,SNR12dB 付近から V-OFDM との性能差が現れた.
次に,位相雑音下において,位相雑音補償をしない場合の性能を図9.2 で比較した.
第9 章 シミュレーション
V-OFDM と CRV-OFDM での性能の差がほとんどなくなったため,V-OFDM につい て記した.σφ =1◦においては,わずかにV-OFDM と CRV-OFDM の性能が良いが,
σφ=2◦では,OFDM と V-OFDM の性能差がなくなった.不完全な発振器において発
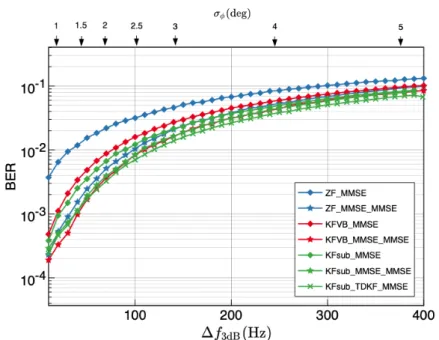
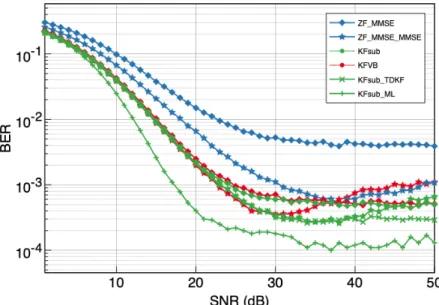
生する位相雑音は,CPE や ICI を引き起こし,V-OFDM と CRV-OFDM の VB の有用 性もなくしてしまう. 次に,位相雑音の影響を確認するために,AWGN の影響が十分に小さい SNR30dB において,∆f3dB ∈ {10 ∼ 800}Hz で変化させ,シミュレーションを行った.M = 2,4 でのV-OFDM と CRV-OFDM におけるシミュレーション結果をそれぞれ図 9.3∼図 9.6 に添付した. 図9.3: SNR=30, M = 2, V-OFDM BER
第9 章 シミュレーション
図9.4: SNR=30, M = 4, V-OFDM BER
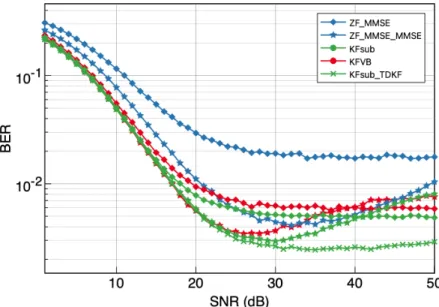
第9 章 シミュレーション 図9.6: SNR=30, M = 4, CRVOFDM BER 図9.3,図 9.4 より,サブキャリア間カルマンフィルタを位相雑音推定に用いた場合 の性能がベクトルブロック間カルマンフィルタよりも同等もしくは高いことが分かっ た.また,[16] の方法において,CVBPE 補償だけを行った場合は,位相雑音が小さい 場合でも誤りが多く発生していて,提案手法のカルマンフィルタを用いたCVBPE 補 償方法は,従来手法のCVBPE 補償だけの場合と,IVBCI 補償まで行う場合の中間程 度の補償性能を持っていた.BER10−2でCVBPE 補償を MMSE で行う [16] と提案手 法を比較した場合,位相雑音の3dB 帯域幅で 50Hz ほどの性能差が見られた.また, IVBCI 補償までを行った場合については,位相雑音の影響が大きくなった場合でも提 案手法が上回っており,V-OFDM におけるカルマンフィルタを用いた位相雑音補償方 法が有効であることが分かった.図9.5と9.6 では,CRV-OFDM における位相雑音補償 の性能差を比較したが,V-OFDM のときと同様に提案手法の性能が上回った.IVBCI 補償の従来の方法は,計算量がO((MN)3) であり,ベクトルブロック間カルマンフィ ルタを用いたCVBPE 補償は計算量が O(M3N) である.また,時間領域カルマンフィ ルタをIVBCI 補償に用いた場合及び,サブキャリア間カルマンフィルタを CVBPE 補 償に用いた場合の演算はスカラーであり,単純にO(MN) となる. CRV-OFDM は線形等化器で V-OFDM に対して優れているが,実際にサブキャリア