I
令和元年度 修 士 論 文
ヒストグラムテスト法による
ADC 試験短時間化のための
入力信号に関する研究
指導教員 小林 春夫 教授
群馬大学大学院理工学府 理工学専攻
電子情報・数理教育プログラム
趙 宇杰
II
目次
第一章 序論 ... 1 1.1 研究背景 ... 1 1.2 研究目的 ... 3 第二章 A/D・D/A 変換器 ... 4 2.1 A/D・D/A 変換器とは ... 4 2.1.1 理想的なサンプリングとスペクトルエイリアシング ... 6 2.1.2 量子化ノイズ... 6 2.1.3 ADC 性能評価 ... 9 2.2 ヒストグラム法 ... 11 2.2.1 ヒストグラム法原理 ... 11 2.2.2 正弦波ヒストグラム法 ... 14 2.2.3 ADC の非線形性が生じやすいコード ... 16 参考文献: ... 20 第三章 サンプリングクロックと, 正弦波の初期位相を調整する方法 ... 21 3.1 ランダムサンプリング ... 21 3.2 波形抜けと黄金比サンプリング ... 21III 3.3 サンプリングクロックと, 正弦波の初期位相を調整する方法 ... 25 3.4 シミュレーション結果 ... 26 3.4.1 𝑓𝐶𝐿𝐾≒𝑓𝑠𝑖𝑔の場合 ... 26 3.4.2 𝑓𝐶𝐿𝐾≒2𝑓𝑠𝑖𝑔の場合 ... 28 3.5 まとめ ... 30 参考文献: ... 31 第四章 複数の正弦波を合成する方法 ... 32 4.1 先行研究 ... 32 4.2 入力波の関数とヒストグラム形状の関係 ... 33 4.3 汎用的なアルゴリズム生成 ... 36 4.4 シミュレーション結果 ... 40 4.4.1 単一正弦波の場合 ... 41 4.4.2 合成する正弦波の場合 ... 43 4.4.3 修正 ... 44 4.5 考察 ... 47 4.6 複数の正弦波を合成する... 50 4.7 まとめ ... 55
IV 参考文献 ... 56 謝辞 ... 57 研究業績 ... 58 国際学会発表 ... 58 国内学会発表・研究会発表 ... 59 受賞 ... 59
1
第一章 序論
1.1 研究背景
デジタル信号処理及びデジタル計算技術の発展につれて, 現代社会はますます「デジ タル」の世界での生活を享受している. アナログ回路に比べて, デジタル回路を用いる とノイズの影響が少ない・信頼性が高い・複雑な機能を実現するためにチップに統合し やすくなるという利点が生じる. しかしながら, 現実世界で我々が触れている信号は, 音や画像などのアナログ信号である. したがって, アナログ信号とデジタル回路での信 号の間のインターフェースとしてアナログ信号をデジタル信号に変換する処理を容易 に実現できる必要がある. この機能を実現する回路が A/D 変換器(Analog-to-Digital Converter, ADC)である. A/D 変換器は, 電子システムの構成において重要なモジュールであり, システム全体 の性能に重要な影響を及ぼすことが多い. 超深度サブミクロン CMOS プロセスの発展 に伴ない, デジタル回路集積度がますます高くなり, その実現機能が複雑になり, 信号 の高速処理, 精度要求も高くなっている. しかしながら A/D 変換器の設計の発展は比較 的緩やかで, アナログ設計ソフトウェアツールの開発も未熟で, 概してアナログインタ ーフェース回路の発展はデジタル回路の発展より遅れている. 特にデジタルテレビ/ビ デオシステムとデジタル通信システムにおいて, その性能(例えば, 速度・精度)はシ2 ステム全体の性能の向上を制限している場合が多い. ADC の導入以来, ディスクリート半導体および集積回路のデータ変換の開発を経験 し, 高速・高精度 ADC の開発戦略は, 性能に影響がないことを前提に, できるだけ集積 度を高め, 最終ユーザーに製品解決策を提供する半導体, 集積回路データ変換のプロセ スを経てきた. 現在, ADC に対する需要は大幅に増加しており, 様々なアプリケーショ ンに適用される要件に適応するために, 性能指標がより広い範囲でカバーされること が求められている. ADC の主な応用分野は絶えず広がり, センサー, マルチメディア, 通信, 計測などの分野に広く応用されている. ADC は様々な分野の異なる要求に対応し て, それぞれの最適化設計方法を有している. 一方, 設計段階では ADC 自体のプロセ スおよび回路構成だけでなく, 信号変調を対応し, アナログフィルタなどのアナログ回 路のようなADC の周辺回路設計も考慮しておく必要がある.
3
1.2 研究目的
1 ドルチップを試験するために許容される量産出荷時のテスト時間は 1 秒程度である. しかしながら,高分解能低速 ADC の試験は, (a)低速サンプリング、(b)高分解能 (多数の符号)の問題から, 長時間を要する. 本研究では, テストにかかる時間を短縮 することを目指す. これは高品質・低コスト ADC の大量生産出荷にとって重要である. 正弦波を入力することで, ヒストグラム法を使って ADC の線形性をテストすること ができる. すべてのデジタル出力コードをサンプリングする代わりに, 必要な範囲のコ ードだけをサンプリングすることでテスト時間を短縮できる. これまでに, 以下二つの アプローチにより, 特定のコードにヒストグラムを集中させる方法を提案されてきた. (i) サンプリングクロックの周波数と, 入力信号の初期位相を調整する方法 (ii) 複数の正弦波を合成する方法 ここでの研究はこれらをベースにさらにこれらの技術を発展させることである。4
第二章
A/D・D/A 変換器
2.1 A/D・D/A 変換器とは
A/D 変換とは, 電圧値もしくは電流値をアナログからデジタルに変換することである. これは連続した信号であるアナログを, 離散した信号であるデジタルに変換すること を意味する. この A/D 変換のことを符号化(Coding)または変調(Modulation)という. A/D 変換は電子回路より成り立ち, この電子回路を ADC とも呼ぶ. アナログからデジ タルへ変換していく A/D 変換のステップは基本的に前置フィルタを通ったあとアナロ グ信号を標本化(サンプリング)し, 量子化, 符号化して完了する. A/D 変換器には以下のような種類がある. (1) フラッシュ型(Flash type)(2) 逐次比較型(SAR : Successive Approximation Register Type)
(3) パイプライン型 (Pipeline Type )
(4) 積分型(計数型 : Integral Type)
5
D/A 変換とは, デジタルから電圧値もしくは電流値であるアナログに変換することで
ある. これは離散的な信号であるデジタルを, 連続した信号であるアナログに変換する
ことを意味する. この D/A 変換は復号化(Decoding)または復調(Demodulation)とい
う. D/A 変換は DAC(Digital-to-Analog Converter)と呼ばれる電子回路で実現さる. デジタ
ルからアナログへ変換していく D/A 変換のステップは基本的に復号化と再生フィルタ
と後置フィルタを通して完了する[1].
D/A 変換器には主に以下のような種類がある.
(1) 抵抗ストリング型(Resistor String Type)
(2) R-2R 型(はしご型 : Ladder Type)
(3) 電流切り替え型 (Current Switching Type)
(4) 容量切り替え型(容量アレイ型 : Capacity Switching Type)
(5) Δ-Σ 変調型(Delta-Sigma Modulator Type)
6
2.1.1 理想的なサンプリングとスペクトルエイリアシング
離散時間サンプルシーケンスは通常, アナログ入力信号x(t)を周期的にサンプリング することによって得られる. x(n) = (n𝑇𝑠), 𝑇𝑠 = 1 𝑓⁄ はサンプリング時間, 𝑓𝑠 𝑠はサンプリ ング周波数である. サンプリング周波数が次のナイキスト基準を満たしている場合, サ ンプリングされた信号は再構築することができる. 𝑓𝑠 ≥ 2𝑓𝐵 (2-1) ここで𝑓𝐵は信号帯域幅で, もし𝑓𝑠が小さくなければ高周波信号は信号帯域にエイリア シングされ, 帯域内ノイズが増加し, 信号を再構成することができなくなる. 通常, 信 号はサンプリングの前にアンチエイリアスフィルタ(Anti-Alias Filter,AAF)を通過し て, 信号帯域幅を超えるスペクトル成分を除去する必要がある.2.1.2 量子化ノイズ
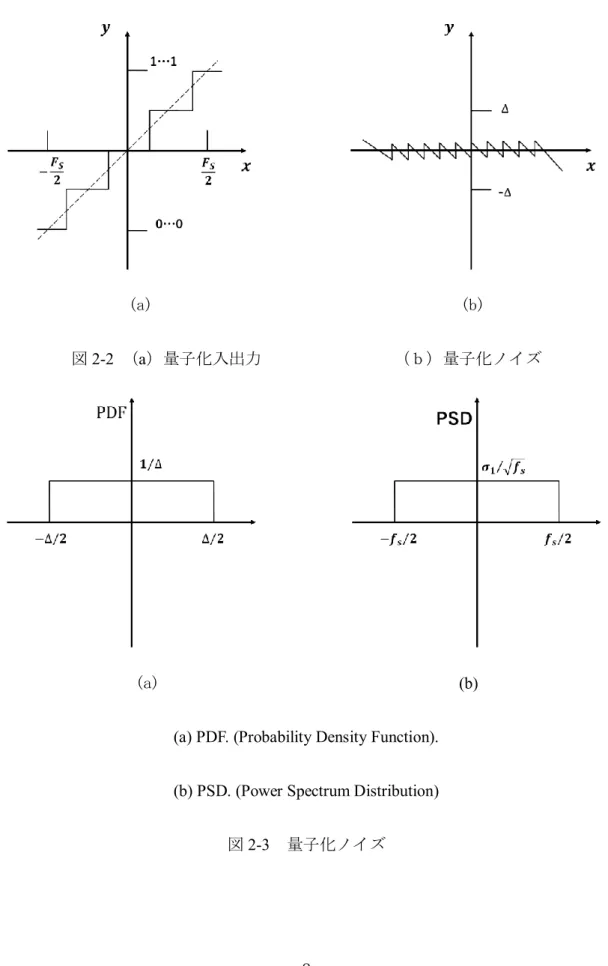
図2-2(a)は, 入力サンプル信号 x(n)を振幅の離散デジタル信号に変換する量子化 器の入出力曲線で, 入力サイズに応じて 0..0 から 1...1 まで N ビットのデジタル信号を 使用する. 最小入力が−𝐹𝑆⁄ (0…0), 最大入力が𝐹2 𝑆⁄ (1…1)であることを意味する. 2 ここで, 𝐹𝑆(Full Scale)は量子化器のフルスケール入力である.7 デジタル信号のビット数Nは量子化器の精度を表す. すなわち, 量子化器が分解でき る最小ステップサイズは, ∆= 𝐹𝑆⁄2𝑁である. 量子化誤差とは入力と出力の差であり, 入 力 信 号 と 量 子 化 の 関 係 は 図 2-2(b) の よ う に な り , 入 力 信 号 の 大 き さ が 範 囲 [ − 𝐹𝑆⁄ , 𝐹2 𝑆⁄ ]に制限されるの場合, 量子化誤差は[− ∆ 22 ⁄ , ∆ 2⁄ ]の範囲に制限され る. 入力信号のランダムな変動や入力範囲の制限などの特定の条件下では, 量子化誤差 は無相関のランダムホワイトノイズであり, [− ∆ 2⁄ , ∆ 2⁄ ]に均等に分布していると見
なすことができる. 確率密度関数(Probability Density Function, PDF)を図 2-3(a)に示
す. 総量子化雑音エネルギーは以下のように計算することができる. 𝜎𝑞2= ∫ 𝑃𝐷𝐹(𝑞)𝑑𝑞 ∞ −∞ =1 ∆ ∫ 𝑞 2𝑑𝑞 ∆ 2⁄ −∆ 2⁄ =∆ 2 12 (2-2) そのパワースペクトル密度(PSD)は, 図 2-3(b)に示すように[−𝑓𝑠⁄ , 𝑓2 𝑠⁄ ] に均等2 に分布ホワイトノイズであり, その振幅は∆ √12𝑓⁄ 𝑠, 総ノイズエネルギーも PSD (Power Spectrum Density)を[−𝑓𝑠⁄ , 𝑓2 𝑠⁄ ]から積分することで得られる. 2 𝜎𝑞2= ∫ ( ∆ √12𝑓𝑠 ) 2 𝑑𝑓 𝑓𝑠⁄2 −𝑓𝑠⁄2 =∆ 2 12 (2-3)
8 (a) (b) 図2-2 (a)量子化入出力 (b)量子化ノイズ (a) (b)
(a) PDF. (Probability Density Function).
(b) PSD. (Power Spectrum Distribution)
9
2.1.3 ADC 性能評価
ADC の動作原理および動作特性をより良く理解するためには, ADC のいくつかの重
要な基本性能指標を理解する必要がある.
(1) 信号雑音比(Signal to Noise Ratio,SNR):信号のエネルギーと雑音のエネルギ
ーの信号帯域内の比を指す(通常は正弦波信号入力で測定する). フルレンジ の正弦波信号(振幅𝐴 = 𝐹𝑆⁄ )として入力し, ノイズは量子化誤差のみを含む2 と仮定すると, 最大の信号対雑音比は式で表される. SNR =1 2𝐴 2 ⁄ 𝜎𝑞2 = 3 × 22𝑁−1 (2-4) デシベル(dB)の単位で表すと, 次のようになる. SNR[dB] = 10𝑙𝑜𝑔10(𝑆𝑁𝑅) = 6.02𝑁 + 1.76 (2-5)
(2) 有効ビット数(Effective Number of -bits,ENOB):SNR 測定後, ADC の性能は
有効ビット数で測定できる.
ENOB =𝑆𝑁𝑅[𝑑𝐵] − 1.76
6.02 (2-6)
(3) 信号対ノイズと全高調波の比(Signal to Noise and Distortion Ratio, SNDR):信号
エネルギーと雑音エネルギーと全高調波の信号帯域内の和の比を指す.
SNDR = 𝑃𝑠𝑖𝑔𝑛𝑎𝑙 𝑃𝑛𝑜𝑖𝑠𝑒+ 𝑃𝑑𝑖𝑠𝑡𝑜𝑟𝑡𝑖𝑜𝑛
10
ここで, 𝑃𝑠𝑖𝑔𝑛𝑎𝑙は信号電力, 𝑃𝑛𝑜𝑖𝑠𝑒はノイズ電力, 𝑃𝑑𝑖𝑠𝑡𝑜𝑟𝑡𝑖𝑜𝑛は全高調波電力を表
す.
(4) ダイナミックレンジ(Dynamic Range, DR):ADC で処理の最大信号と最小エネ
ルギー分解信号との比をいう.
(5) スプリアスフリーダイナミックレンジ(Spurious-Free Dynamic Range, SFDR):
ADC の出力スペクトルにおける最大高調波または最大スプリアスノイズに対す る信号エネルギーの比を表す. SFDR = 20 log As AHD(max) [dB] (2-8) (6) 微分非直線性誤差(DNL: Differential Non-Linearity) 一定の変換値を取る入力信号電圧範囲V𝑎の理想的な量子化電圧V𝑞からのずれを 量子化電圧V𝑞で規格化した値を示す. 主にノイズに関係する. 式(2-9)で表現さ れ, ある出力デジタルコードがなくなる(ミッシングコードが発生する)と DNL は-1LSB を示す. DNL(LSB) =Va− Vq Vq (2-9)
(7) 積分費直線性誤差(INL: Differential Non-Linearity)
実際の入力信号値の理想特性からのずれを示す. DNL 値の積分値であり, 歪成分
に関係する. 式(2-10)で表現される
11
2.2 ヒストグラム法
2.2.1 ヒストグラム法原理
ヒストグラム法は, 振幅分布(または確率密度関数), 𝑝𝑖𝑛(𝑥)が既知の ADC 入力で 得られた出力サンプルのシーケンスの統計的研究である. 特定の出力コード𝑉𝑖の発生 確率𝑃𝑖は, 理想的な ADC の場合, 入力が𝑉𝑖の範囲にある確率の積分である. したがって, N 個の等しい量子化間隔とダイナミックレンジ𝑉𝐹𝑆を持つ理想的なADC は次のようになる. 𝑃𝑖= ∫ 𝑝𝑖𝑛 𝑖∆ (𝑖−1)∆ (𝑥)𝑑𝑥; 𝑖 = 1 … … 𝑁; ∆= 𝑉𝐹𝑆/(𝑁 − 1) (2-11) コンバーターが理想的でない場合, 出力コード𝑉𝑖の発生確率を定義する積分は, 実際 のコード遷移制限の間で拡張する必要がある. 𝑃𝑖,𝑟= ∫ 𝑝𝑖𝑛 𝑉𝑈,𝑖 𝑉𝐿,𝑖 (𝑥)𝑑𝑥; (2-12) 最小および最大のコードは次のように表せる. 𝑉𝐿,𝑖= ∑ ∆𝑗; 𝑉𝑈,𝑖= 𝑉𝐿,𝑖+ ∆𝑖 𝑖−1 𝑗=1 (2-13) サンプル数M が大きいと仮定すると, 𝑃𝑖と𝑃𝑖,𝑟は, 理想的な場合と実際の場合にコ ードViを生成するサンプル𝑀𝑖と𝑀𝑖,𝑟のおよその数をM で割ったものである. 𝑃𝑖= 𝑀𝑖 𝑀; 𝑃𝑖,𝑟= 𝑀𝑖,𝑟 𝑀 (2-14)12 量子化間隔の数および確率密度関数は, 通常, 𝑝𝑖𝑛(𝑥)が i 番目の量子化間隔内で一定 であり, 𝑝𝑖𝑛(𝑉𝐿.𝑖)に等しいと仮定できるようになっている. したがって, 式(2-12)を 使用すると, 次が得られる. 𝑃𝑖= 𝑝𝑖𝑛(𝑉𝐿.𝑖)∆; 𝑃𝑖,𝑟= 𝑝𝑖𝑛(𝑉𝐿.𝑖)∆𝑖 (2-15) 式(2-14)を使用すると, 次が得られる. ∆𝑖= 𝑀𝑖 𝑀 ∙ 𝑝𝑖𝑛(𝑉𝐿.𝑖) (2-16) さらに, 入力がダイナミックレンジ全体で一定の確率を持っている場合(リニアラ ンプやアナログレンジ全体に広がる鋸歯状), ここで𝑝𝑖𝑛(𝑥) = 1 𝑉𝐹𝑆, 0~𝑉𝐹𝑆範囲に𝑝𝑖𝑛(𝑥) の積分は1 である. したがって, 次が得られる. ∆𝑖 𝑉𝐹𝑆 =𝑀𝑖 𝑀 = 1 𝑁; ∆𝑖 𝑉𝐹𝑆 =𝑀𝑖,𝑟 𝑀 ; (2-17) i 番目のコードの DNL を決定するは, 次を用いる. 𝐷𝑁𝐿(𝑖) =∆𝑖− ∆ ∆ = 𝑀𝑖,𝑟−𝑀𝑖 𝑀𝑖 ; (2-18) また, 次の関係がある. 𝐷𝑁𝐿(𝑖) =𝑁 ∙𝑀𝑖,𝑟 𝑀 − 1 (2-19)
13 (a)ADC のランプ波入力ヒストグラム法テスト (b) 非線形性を含んだADC の場合(∆ℎ𝑖 = ∆𝑖− ∆) 図2-4 ヒストグラムの DNL と INL 図2-4 のように, DNL の累積により INL が取得されるため, ヒストグラム法を使用す ると, DNL と INL の両方が, 各コードに保存されているサンプルの数に反比例する精 度で決定さる.
14
2.2.2 正弦波ヒストグラム法
確率密度関数の正確な知識はヒストグラム法の鍵であるため, 別の便利なテスト信 号は正弦波である. 高調波成分のフィルタリングは, 高 Q 値の水晶発振器フィルタを使用した簡単な操 作である. したがって, 歪んだ正弦波であっても, 正弦波形状の優れた制御, ひいては 確率密度関数の正確な推定を得ることができる. 可能なオフセット(𝑉 = 𝐴 ∙ 𝑠𝑖𝑛(𝑥) − 𝑉𝑂𝑆)を含めると次のようになる. 𝑝(𝑉) = 1 𝜋√𝐴2− 𝑥2 ; 𝑥 = 𝑉 − 𝑉𝑂𝑆 (2-20) 図 2-5 に示すように, 被試験 ADC にオフセットがあると, ヒストグラムは非対称に なる[2]. 図2-5 オフセットが発生するヒストグラム15 図2-6 のように入力正弦波のサンプルを取り, 入力波形に対応する出力値デジタルコ ードを記憶する. そして, 図 2-7 のように各コードの発生度数を, コードの関数として プロットする. 横軸は図 2-5 横軸(-1~1)の 1024 分割の範囲. 低歪の純粋な正弦波はアナ ログフィルタを用いると比較的容易に作成できるのがメリットである[3,4]. 図2-6 ヒストグラムの作成 図2-7 正弦波ヒストグラムの例 0 500 1000 1500 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code
16
しかし, 図 2-7 のようにコードの両端にヒストグラムが集中するため, コード中央の
テストを行うのに時間がかかるというデメリットがある[2,5,6]. 特定のコードにヒストグ
ラムを集中することができれば, このデメリットを解消することができる.
2.2.3 ADC の非線形性が生じやすいコード
ADC 内部の DAC の線形性が, ADC 全体の線形性を決めることが多い.
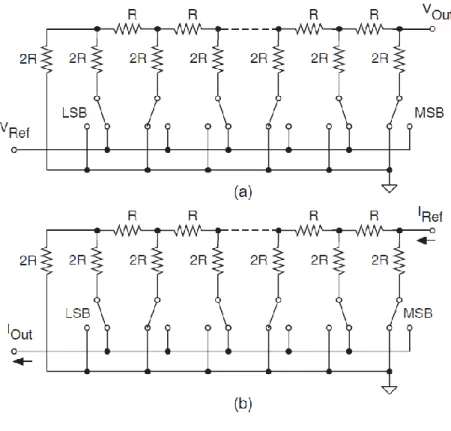
例えば, 図 2-8 のような 10bit R-2R ラダー2 進重み付け DAC ではデジタルコード (1+2+4+8+16+32+64+128+256=)511 から 512 近辺は最も大きな非線形性が生じやすい. (スイッチ 1, 2, 3, 4, 5, 6, 7, 8, 9 からスイッチ 10) 次に256, 768 近辺, その次に 128, (256+128=)384, (512+128=)640, (768+128=)896 近辺 で大きな非線形性が生じやすい. この近辺のヒストグラムの点数を多くなるようにするならば, 精度良く DNL を測定・ テストできる.
17
(b)電圧モードラダー (b)電流モードラダー
図2-8 R-2R ラダーネットワーク
ADC の非線形性が生じやすい特定コードとその部分の正確なヒストグラム法による
非線形性の測定・テストについて, 図 2-9 のような入力信号𝑉𝑖𝑛を考案し, テストに使用
する. この波形は任意波形発生器(Arbitrary Waveform Generator: AWG) 等を用いて生成
することができる.
テスト時にADC デジタル出力の全コードに対して均一に非線形性を調べるよりも、
非線形性を生じやすい特定コードを重点的に調べる(逆に言えば他のコードの非線形性
18 𝑓(𝑥) = sin(𝑥) −sin(3𝑥) 3 図2-9 入力信号の例 図2-10 入力信号𝑓(𝑥) = sin(𝑥) −sin(3𝑥) 3 のヒストグラム -1.5 -1 -0.5 0 0.5 1 1.5 0 2000 4000 6000 8000 10000 A m p lit u d e Time 0 100 200 300 400 500 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code
19 図2-11 正弦波入力に対するヒストグラムの例 図2-10 のように, 𝑓(𝑥) = sin(𝑥) −sin(3𝑥) 3 のとき512 に集中するのヒストグラムに集中 するヒストグラムができる. 図 2-11 と比較して,特定コードにサンプル数が増やすこと ができる. 図 2-9 のような入力信号𝑉𝑖𝑛を使用すれば. 非線形性が生じやすいコードにサ ンプル数が増やす方法から, ヒストグラムテストに DNL を測定・テストの精度上がる ことが可能である. 0 50 100 150 200 250 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code
20
参考文献:
[1] J. Kojima, et. al., “Limit Cycle Suppression Technique Using Digital Dither in Delta Sigma DA Modulator”, IEEE ICSICT 13th (2016)
[2] F. Maloberti, Data Converter, Springer, pp.409-416, (2007).
[3] F. Abe, Y. Kobayashi, K. Sawada, K. Kato, O. Kobayashi, H. Kobayashi,“Low-Distortion
Signal Generation for ADC Testing,” IEEE International Test Conference, Seattle, WA (Oct.
2014).
[4] T. Komuro, S. Sobukawa, H. Sakayori, M. Kono, H. Kobayashi,“Total Harmonic Distortion
Measurement System for Electronic Devices up to100MHz with Remarkable Sensitivity”,
IEEE Trans. Instrumentation and Measurement, Vol. 56, No. 6, pp. 2360 - 2368 (Dec. 2007).
[5] H.-W. Ting, B.-D. Liu, S.-J. Chang, “A Histogram-Based Testing Method for Estimating A/D
Converter Performance”, IEEE Trans. Instrumentation and Measurement, Vol. 57, No. 2, pp.
420-427 (Feb. 2008).
[6] Y. Ozawa, A. Kuwana, K. Asami and H. Kobayashi, "ADC Linearity Testing Using Multi-tone
Input Histogram Method", Joint Research Workshop of IEEJ Gunma & Tochigi Sections,
21
第三章 サンプリングクロックと
, 正弦波の初期位
相を調整する方法
3.1 ランダムサンプリング
ランダムサンプリングは, 測定された波形信号に対して非同期サンプリングロック を使用し, それが周期的であり, 測定された波形の位相ゼロからの各サンプリング時間 が測定され既知である場合を考える. 多くの増幅データを取得した後, 1 周期の波形を 再構築することができる.3.2 波形抜けと黄金比サンプリング
図3-1 は, 適切なサンプリング条件でのランダムサンプリングの再構成された波形の 典型的な展開を示している. ただし, 次の場合は, ランダムサンプリングシステムで 1 周期の波形全体を取得するのに長い時間が必要な波形抜け現象が発生する可能性があ る.22
図3-1 ランダムサンプリングのための再構成された波形
𝑓
𝐶𝐿𝐾>>𝑓
𝑠𝑖𝑔:図3-2 に示すように, 測定された波形の繰り返し周波数(𝑓
𝑠𝑖𝑔)は, サンプリングクロック周波数(
𝑓
𝐶𝐿𝐾)と比較して非常に低い.23
𝑓
𝐶𝐿𝐾≒(1/α)𝑓
𝑠𝑖𝑔:測定された波形の繰り返し周波数(𝑓
𝑠𝑖𝑔)は, 図 3-3 に示すよう に, サンプリングクロック周波数(𝑓
𝐶𝐿𝐾)の高調波に近似している. 𝛼 = 1,1 2, 1 3, 2 3, … … 図3-3𝑓
𝐶𝐿𝐾≒(1/6)𝑓
𝑠𝑖𝑔の場合の波形抜け現象𝑓
𝐶𝐿𝐾≒𝑓
𝑠𝑖𝑔:図3-4 に示すように, 測定された波形の繰り返し周波数(𝑓
𝑠𝑖𝑔)はサン プリングクロック周波数(𝑓
𝐶𝐿𝐾)に非常に近い. 図3-4𝑓
𝐶𝐿𝐾≒𝑓
𝑠𝑖𝑔の場合の波形抜け現象24 図3-5 は, 入力波形の位相 0 からの 16 点での提案された黄金比サンプリング(
𝑓
𝐶𝐿𝐾=
∅𝑓
𝑠𝑖𝑔)のシミュレーション結果を示している. 入力信号の周期は 1 として正規化され, サンプリングクロックの周期は1/∅である. その割合は∅: 1であり, これを黄金比サン プリングと呼ぶ. 表3-1 サンプルフェーズと距離No. Phase Phase Distance
1 0.000 0.618 2 0.618 0.382 3 0.236 0.618 4 0.854 0.382 5 0.472 0.382 6 0.090 0.618 7 0.708 0.382 8 0.326 0.618 9 0.944 0.382 10 0.562 0.382 11 0.180 0.618 12 0.798 0.382 13 0.416 0.382 14 0.034 0.618 15 0.652 0.381 16 0.271 次に, ナイキストサンプリング定理に違反するが, 入力信号が反復的であり, 等価時 間サンプリングが使用される場合を考える. サンプリングされたポイントから入力波 形を再構築できる. 表 3-1 に, 位相と距離を示す. 図 3-5 から, 波形の抜けは観察されず,
25 効率的な波形の取得が得られることがわかる. 図3-5 フェーズ 0 から始まる黄金比サンプリングによるサンプリング順序
3.3 サンプリングクロックと, 正弦波の初期位相を調整する方法
佐々木 et.al.は𝑓
𝐶𝐿𝐾と𝑓
𝑠𝑖𝑔の関係を調べて, コードを効率的に取得できる「黄金比」を明らか にした[7]. 逆に, 入力信号波形の収集効率が低い𝑓
𝐶𝐿𝐾と𝑓
𝑠𝑖𝑔の関係を積極的に使用することにより, 特定のコードにヒストグラムを集中させることができる. いくつかの例を図 3-7, 3-8 に示し,𝑓
𝐶𝐿𝐾、𝑓
𝑠𝑖𝑔、𝜃(
入力正弦波の初期位相)の関係を示す. 縦軸はサンプリングされたデータの数 を表し, 横軸はデジタル出力コードを示す. サンプルポイントの数は, 第三章すべての図で 10,000 である.26 図3-6 10,000 サンプルヒストグラムの例 図3-6 は, ヒストグラムがすべてのコードでほぼ平均的に分布していることを示して いる.
3.4 シミュレーション結果
3.4.1 𝑓
𝐶𝐿𝐾≒𝑓
𝑠𝑖𝑔の場合
図3-7 は, ヒストグラムが 1 つの特定の場所に集中している例である.𝜃
(入力正弦波の初期位相)を変更することにより, 集中位置を制御することができ る. 0 50 100 150 200 250 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code27 (a)𝑓𝐶LK= 𝑓𝑠𝑖𝑔× 1+100000 100000 𝜃 = 0 (b)𝑓𝐶LK= 𝑓𝑠𝑖𝑔× 1+100000 100000 𝜃 = 𝜋 2⁄ × 0.5 -50 0 50 100 150 200 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code -50 0 50 100 150 200 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code
28 (c)𝑓𝐶LK= 𝑓𝑠𝑖𝑔× 1+100000 100000 𝜃 = 𝜋 2⁄ × 0.9 図3-7 ヒストグラムの例と
𝑓
𝐶𝐿𝐾、𝑓
𝑠𝑖𝑔、𝜃
の関係3.4.2 𝑓
𝐶𝐿𝐾≒2𝑓
𝑠𝑖𝑔の場合
図3-8 は, ヒストグラムが 2 つの特定の場所に集中している例である.𝜃
(入力正弦波の初期位相)を変更することにより, 集中位置を制御することができ る. (a) 𝑓𝐶LK= 𝑓𝑠𝑖𝑔× 2×(1+100000) 100000 𝜃 = 0 -50 0 50 100 150 200 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code -50 0 50 100 150 200 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code29 (b)𝑓𝐶LK= 𝑓𝑠𝑖𝑔× 2×(1+100000) 100000 𝜃 = 𝜋 2⁄ × 0.5 (c)𝑓𝐶LK= 𝑓𝑠𝑖𝑔× 2×(1+100000) 100000 𝜃 = 𝜋 2⁄ × 0.9 図3-8 ヒストグラムの例と
𝑓
𝐶𝐿𝐾、𝑓
𝑠𝑖𝑔、𝜃
の関係 -50 0 50 100 150 200 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code -50 0 50 100 150 200 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code30
3.5 まとめ
上述したように, 本方法では, 入力正弦波周波数(𝑓
𝑠𝑖𝑔)に対してサンプリング周波 数(𝑓
𝐶𝐿𝐾)を制御することにより, ヒストグラム集中度を調整する. そして, ヒストグ ラムが集中する位置は, 入力正弦波の初期位相𝜃
を制御することにより調整される. し かし, 信号生成ハードウェアシステムでは初期位相𝜃
を自由に制御することが難しいと いう問題がある.31
参考文献:
[7] Y. Sasaki, Y. Zhao, A. Kuwana and H. Kobayashi, "Highly Efficient Waveform Acquisition Condition in Equivalent-time Sampling System", 27th IEEE Asian Test Symposium, Hefei, Anhui, China (Oct. 2018).
32
第四章 複数の正弦波を合成する方法
4.1 先行研究
先行研究[8]では, 図 4-1(a)に示すような形状の三角波は, 式(4-1)に示すような正 弦波合成式によって作成された. 図 4-1(a)の信号を入力波として使用すると, 図 4-1 (b)に示すような青い線のヒストグラムが得られます. 出力コード 384〜640 にコード を集中させることができる. 𝑓(𝑡) = 𝐴(𝑊1+ 2.6𝑊2+ 1.8𝑊3+ 1.4𝑊6+ 1.2𝑊7) + 𝑉𝑂𝑆 𝑊𝑚= cos((2𝑚−1)𝜔𝑡) (2𝑚−1)2 𝐴 = 2.90[𝑉] 𝑉𝑂𝑆 = 4.0[𝑉] (4-1) 以前の研究では, 式(4-1)の係数は試行錯誤によって決定された. この研究で は, 𝑓(𝑡)を自動的に決定するアルゴリズムの作成を目指している. (a) 式(1)により生成される信号𝑓(𝑡) -2 -1 0 1 2 0 819216384245763276840960491525734465536 A m p lit u d e Time33 (b)ヒストグラム(赤線:正弦波を入力信号とした場合, 青線:(a)を入力波とした場合) 図4-1 複数の正弦波を合成する方法 例として, ヒストグラムの中央で 10 個以上のサンプルを取るようにヒストグラムが 作成された場合. テスト時間は, ほぼ半分の時間で短縮できる[9].
4.2 入力波の関数とヒストグラム形状の関係
ヒストグラムは, 各々が互いに素である区間・階級(カテゴリ, これをビン(bins)とい う. ヒストグラムのグラフの柱(棒)のこと)に分類できる, 観察結果の数を図にした もの. 図 4-2 はヒストグラムを合成する原理を示す. -100 400 900 1400 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code34 (a)各々が互いに素である区間 (b)観察結果の数 図4-2 ヒストグラムを合成する原理 図4-3 は𝑥(𝑡) = 𝑠𝑖𝑛𝜔𝑡を線分𝑥 = 𝑡に沿って折り返したものである, つまり逆関数𝑡 = 𝑎𝑟𝑐𝑠𝑖𝑛𝑥である.
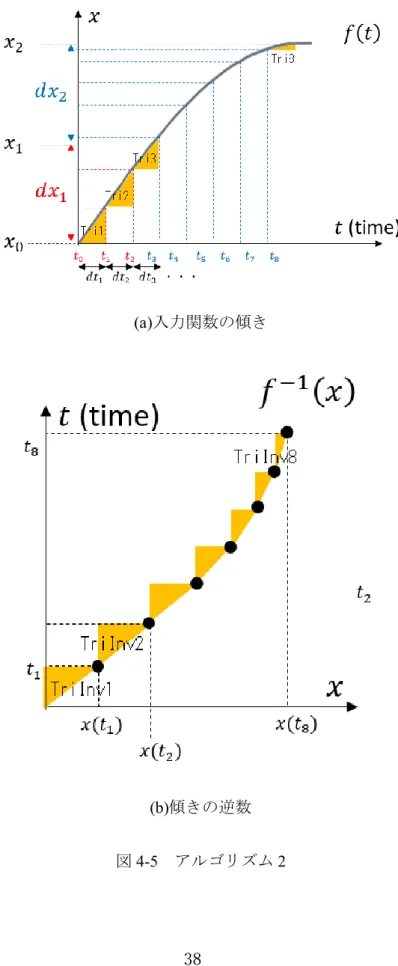
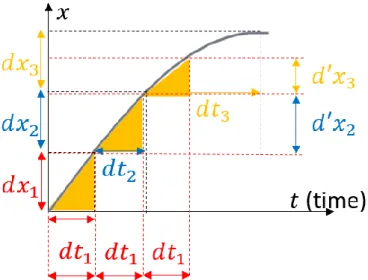
35 図4-3 𝑡 = 𝑎𝑟𝑐𝑠𝑖𝑛𝑥の傾き この関数の傾き𝑑𝑡1 𝑑𝑥1、 𝑑𝑡2 𝑑𝑥2、 𝑑𝑡3 𝑑𝑥3を考えれば, 𝑑𝑥1、𝑑𝑥2、𝑑𝑥3は各々が互いに素でと見な すことができる, そして𝑑𝑡1、𝑑𝑡2、𝑑𝑡3は観察結果の数として使用する. ここで, ヒスト グラム𝐻(𝑐𝑜𝑑𝑒(𝑥))の傾き𝑑𝑡 𝑑𝑥(または値𝑑𝑡)は, 入力関数の逆関数の導関数に比例する と考える. この入力波の関数とヒストグラム形状の関係に基づいて, テストに必要なコードの みにヒストグラムを集中させるについて提案する.
36
4.3 汎用的なアルゴリズム生成
目標は, テストに必要なコードのみにヒストグラムを集中させることである. 言い換 えると, 「任意のヒストグラム𝐻(𝑐𝑜𝑑𝑒(𝑥))を生成できる入力関数𝑓(𝑡)を取得します」. 図 4-4 に示すように, 入力関数は𝑓(𝑡)であり, ヒストグラムの形状は𝐻(𝑐𝑜𝑑𝑒(𝑥)) である. こ の研 究で は, 最初のステップとして , 入力関数𝑓(𝑡)からヒストグラムの形状 𝐻(𝑐𝑜𝑑𝑒(𝑥))を数学的に検索し, 単純な関数で検証するアルゴリズムを提案した. 図4-4 入力波とヒストグラム形状の関係 ヒストグラ傾き∆𝐻(code(𝑥𝑖)) ∆code(𝑥𝑖) (または𝐻(code(𝑥
𝑖))
)は, 入力関数の逆関数の導関数 𝑑𝑓−1(𝑥) 𝑑𝑥|
𝑥=𝑥𝑖に比例する. 私たちのアルゴリズムは, この考えに基づいて作成する. ヒストグラムを数学的に取得するには, 次の 2 つの方法を提案する. アルゴリズム1(逆関数𝑓−1(𝑥)を使用):𝐻(code(𝑥
𝑖)) =
𝑑𝑓
−1(𝑥)
𝑑𝑥
|
𝑥=𝑥 𝑖− 𝐻(code(𝑥
𝑖−1))
(4-2)37 最初に逆関数を見つけ, 対応する位置の傾きを計算してヒストグラムを得る. 図 4-5 のように, 目標はそれぞれの傾き𝑑𝑡 𝑑𝑥. これを対応する位置のサンプル数として使用する. 図4-5 アルゴリズム1 アルゴリズム2(入力関数
𝑓(𝑡)
の傾きの逆数を逆関数𝑓
−1(𝑥)
の傾きとして使用):𝐻(code(𝑥
𝑖)) = 1
𝑑𝑓(𝑥)
𝑑𝑥
|
𝑥=𝑥 𝑖⁄
× ∆𝑥
𝑖 (4-3)38
(a)入力関数の傾き
(b)傾きの逆数
39 逆関数が取得された場合, アルゴリズム 1 はヒストグラムの形状をより正確に計算 できる. ただし, 逆関数を数学的に取得できない場合は, アルゴリズム 2 を使用する必 要がある. たとえば, 入力関数が
𝑓(𝑡) = sin(2𝜋𝑡)
の場合, 逆関数は𝑡 =
1 2𝜋Arcsin 𝑥
である. こ の時点で, ヒストグラムの形状は次のように計算できる. アルゴリズム1:𝐻(code(𝑥
𝑖)) = 𝐾[
1
2𝜋
Arcsin(𝑥
𝑖) −
1
2𝜋
Arcsin(𝑥
𝑖−1)]
(4-4) アルゴリズム2:𝑥 = 𝑠𝑖𝑛 𝜔𝑡
(4-5)1 =
𝑑𝑡
𝑑𝑥
𝜔𝑐𝑜𝑠 𝜔𝑡
(4-6)𝑑𝑡
𝑑𝑥
=
1
𝜔 𝑐𝑜𝑠𝜔𝑡
(4-7) 今, 定義域を−𝜋 2 ≤ 𝜔𝑡 ≤ 𝜋 2として𝑐𝑜𝑠 𝜔𝑡 = √1 − 𝑠𝑖𝑛
2𝜔𝑡 = √1 − 𝑥
2 (4-8) 傾きの逆数は𝑑𝑡
𝑑𝑥
=
1
𝜔 𝑐𝑜𝑠𝜔𝑡
=
1
𝜔√1 − 𝑥
2 (4-9) 計算結果は𝐻(code(𝑥
𝑖)) = 𝐾
1
2𝜋√1 − 𝑥
𝑖2 (4-10)40 K は比較に使用される定数である.
𝐾
の詳細については, 4.4 で説明する.4.4 シミュレーション結果
検証は入力関数で実行される. まず, セクション 2.2 で説明したよく使用される方法 で作成されたヒストグラムを図 4-6 に示す. サンプル数は 100,000 である. これを, 4.3 で説明した2 つのアルゴリズムで得られたヒストグラム形状と比較し, アルゴリズムを 検証した. 比例定数𝐾
は, アルゴリズム 1 と 2 の両方で𝐻(code(𝑥
𝑖))
が得られるように 決定される. 図4-6 通常の方法で得られるヒストグラム(比較用) 次のテスト条件が想定されている:SAR ADC, その分解能は 10 ビット(1024 レベル), 入力信号範囲は0V〜2V, 1LSB≈0.002V, 入力ノイズなし. 1 つのサンプルを取得するの に1 ミリ秒かかると仮定すると, テストには 100 秒かかる. 0 500 1000 1500 2000 2500 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code41
4.4.1 単一正弦波の場合
図4-7(a)と(b)は, アルゴリズム 1 と図 4-6 によって作成されたヒストグラムの比 較結果を示す. 図 4-7(a)はヒストグラムを重ねて描いたもので, ヒストグラムの形状が ほぼ一致していることが確認できる. 図 4-7(b)は, 図 4-6 と図 4-7(a)のヒストグラムデー タの差を示し, 最大偏差は 2.84%, 平均偏差は約 0.77%である[6]. (a) アルゴリズム1で作成したヒストグラムと(a)の比較 0 500 1000 1500 2000 2500 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code42 (b)アルゴリズム1で作成したヒストグラムと(a)の差 図4-7 アルゴリズム1の結果 図4-8(a)と(b)は, アルゴリズム 1 と図 4-6 によって作成されたヒストグラムの比 較結果を示す. 図 4-8(a)よりヒストグラムの形状がほぼ一致していることが確認できる. 図4-8(b)は, 図 4-6 と図 4-8(a)のヒストグラムデータの差を示し, 最大偏差は 3.48%, 平 均偏差は約0.88%である. (a)アルゴリズム2で作成したヒストグラムと(a)の比較 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0 128 256 384 512 640 768 896 1024 Diffe re n ce Output Code 0 500 1000 1500 2000 2500 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code
43 (b) アルゴリズム2で作成したヒストグラムと(a)の差 図4-8 アルゴリズム 2 の結果
4.4.2 合成する正弦波の場合
合成正弦波(先行研究の式(4-1))を検証する. 図 4-8 の波形を入力することでテス トする. 図4-8 テスト波形 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0 128 256 384 512 640 768 896 1024 Diffe re n ce Output Code -2 -1 0 1 2 0 819216384245763276840960491525734465536 A m p lit u d e Time44 この場合, 逆関数の計算が難しいので, アルゴリズム1は使いない. 図 4-9 のように, アルゴリズム2は良い結果を得られない. さらに, 変曲点の近くで計算することは困難 である. そのため, 修正の方法が提案する. 図4-9 ヒストグラム(中央データに基づく, 赤線:計算の場合, 青線:サンプリングの場合)
4.4.3 修正
「傾きの逆数」の横軸を, ヒストグラム横軸に重ね合わせれば, ヒストグラムを描く ことができる. 図 4-10(a)に示すように, 先ずは傾きが負の場合よけるため, 単純に絶 対値を取る. 次に変曲点(傾きがゼロになる)を調べて, 変曲点から変曲点までの範囲 をそれぞれヒストグラムの横軸に重ね合わせる. 最後は横軸の範囲が重なる場合加算 する. そこで, 散布図を描くと, 図 4-10(b)のようになった. 0 5 10 15 20 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code45 (a) sin 波と傾きの逆数 (b)sin 波のヒストグラム 図4-10 傾きの逆数とヒストグラム この方法で, 入力関数
𝑓(𝑡) = sin 2𝜋𝑡 + 𝑠𝑖𝑛4𝑡
に対して検証を行った. 図 4-11 のよう に, 検証はアルゴリズムにはサンプリングと比較していくつかのエラーがある. 0 500 1000 1500 2000 2500 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code46 (a)シミュレーション結果 (b)最大 10 までのズーム 図4-11 修正方法のヒストグラム(中央データに基づく, 赤線:計算の場合, 青線:サンプリングの場合) この方法では, 予想通りの結果が確認できない. 4.3 の計算原理から, エラー発生の 原因を考察する. 0 50 100 150 200 250 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code 0 2 4 6 8 10 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code
47
4.5 考察
問題が発生した場所から考察すれば, 図 4-12 のようなヒストグラムをもう一度考え る. そのため, 図 4-12 のように, エラーが大きいの中央部分のみを拡大した後, 横軸の 範囲エラーが問題の主な原因であると思う. 4.2 計算原理は考察するべき. 図4-12 問題のヒストグラム(中央データに基づく, 赤線:計算の場合, 青線:サンプリングの場合) 図4-13 主な問題部分の拡大 0 5 10 15 20 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.91 1.1 1.2 128192256320384448512576640704768832896 N u m b er o f S am p le s Output Code48
図4-14 のように, 二つのアルゴリズムを考察する. アルゴリズム1の結果は図 4-15
である. 先ずは逆関数を計算する, 次に傾きの計算は予想通りに実行する.
図4-14 アルゴリズム1とアルゴリズム2(𝑑𝑡と𝑑𝑥:1の場合, 𝑑𝑡と𝑑′𝑥:2の場合)
49 ただし, 図 4-16 のように, アルゴリズム 2 は傾きの計算, 次に逆数を計算する方法 である. 実際に計算とき, tによって得られた関数の傾き, 逆数にすると, 対応する横 軸の範囲は等距離ではない, ヒストグラムも等距離範囲のヒストグラムではない. 単一 範囲に対して原理は正しいの原因で, 完成のヒストグラムが目標データではないが, 不 等距離のデータは正しい. 図4-16 アルゴリズム 2 の原理 次の研究では, アルゴリズムを改善すると合成正弦波の偏差を減らすことを目指す. アルゴリズムの方法はまだ完全にバグがとれてないので, 2.2.3 中, 𝑓(𝑥) = sin(𝑥) − sin(3𝑥) 3 のような入力信号𝑉𝑖𝑛関係に研究を続ける.
50
4.6 複数の正弦波を合成する
上記のように, 入力信号の傾きが小さいほど, ヒストグラムの対応する位置にある サンプルが多くなる. したがって, 波を組み合わせることにより, 対応する位置の傾 きを減らすことが提案する. 図4-17 𝑓(𝑥) = sin(𝑥) と𝑓(𝑥) = −sin(3𝑥) 3 図4-17 のように, 目標は 1024 中で 512(𝑥 = 𝑎𝑟𝑐𝑠𝑖𝑛0)にサンプル数を増やす. そのた め, 𝑥 = 𝑎𝑟𝑐𝑠𝑖𝑛0に傾きを減らす. ここで, 二つ波形の上がる部分と下がる部分を合成す れば, 傾きが小さいになる, ヒストグラムのサンプル数は増やすことができる. 式4-11 は入力信号を考案し, テストする.𝑓(𝑥) = sin(𝑥) −
sin(3𝑥)
3
(4-11)51 図4-18 入力信号𝑓(𝑥) = sin(𝑥) −sin(3𝑥) 3 図4-19 入力信号𝑓(𝑥) = sin(𝑥) −sin(3𝑥) 3 のヒストグラム 図 4-19 は図 4-18 入力信号𝑓(𝑥) = sin(𝑥) −sin(3𝑥) 3 のヒストグラム結果, 理論から予想 されるように, ヒストグラムの中心付近(512)のサンプル数が増加した. 同じに, 上がる部分と下がる部分合成すると SIN 波前後半周期傾きが反転の原因で, 𝑓(𝑥) = sin(𝑥) −sin(3𝑥) 3 のように, この係数(3)が奇数ほうがいい. -1.5 -1 -0.5 0 0.5 1 1.5 0 2000 4000 6000 8000 10000 A m p lit u d e Time 0 100 200 300 400 500 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code
52 次に 1024 中で 256 と 768 を検討する. つまり, 𝑥 = 𝑎𝑟𝑐𝑠𝑖𝑛1 2= 𝜋 6, …などの位置を調 整する. 𝜋 6は周期2𝜋の 1 12, 図 4-20 のように, 前部分 5.5 周期後部分 5.5 周期, 式 4-12 をテストする.
𝑓(𝑥) = sin(𝑥) −
sin(11𝑥)
11
(4-12) 図4-20 𝑓(𝑥) = sin(𝑥) と𝑓(𝑥) = −sin(11𝑥) 11 図4-21 入力信号 𝑓(𝑥) = sin(𝑥) −sin(11𝑥) 11 -1.5 -1 -0.5 0 0.5 1 1.5 0 2000 4000 6000 8000 10000 A m p lit u d e Time53 図4-22 入力信号 𝑓(𝑥) = sin(𝑥) −sin(11𝑥) 11 のヒストグラム 理論から予想されるように, 図 4-22 の結果はヒストグラムの目標付近(256, 768)のサ ンプル数が増加した. 同じ方法で𝑎𝑟𝑐𝑠𝑖𝑛1 4≈ 𝜋 12(周期2𝜋の 1 24)と𝑎𝑟𝑐𝑠𝑖𝑛 1 8≈ 𝜋 25(周期2𝜋の 1 50)を検討する, ここで 式4-13(目標は中央近いの 384 と 640)と式 4-14(目標は中央近いの 448 と 576)をテスト する.
𝑓(𝑥) = sin(𝑥) −
sin(23𝑥)
23
(4-13)𝑓(𝑥) = 𝑠𝑖𝑛(𝑥) −
𝑠𝑖𝑛(49𝑥)
49
(4-14) 0 50 100 150 200 250 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code54 図4-21 𝑓(𝑥) = sin(𝑥) −sin(23𝑥) 23 のヒストグラム 図4-22 𝑓(𝑥) = sin(𝑥) −sin(49𝑥) 49 のヒストグラム 結果は理論から予想されるように, ヒストグラム(図 4-21、図 4-22)の目標付近のサ ンプル数が増加した. 次に, 式 4-15 入力関数の𝜔1 𝜔2、𝑘に対して, ヒストグラムの影響 を研究する.
𝑓(𝑥) = 𝑠𝑖𝑛(𝜔
1𝑥) −
𝑠𝑖𝑛(𝜔
2𝑥)
𝑘
(4-15) 0 50 100 150 200 0 128 256 384 512 640 768 896 1024 N u m b er o f S am p le s Output Code 0 50 100 150 0 64 128 192 256 320 384 448 512 576 640 704 768 832 896 9601024 N u m b er o f S am p le s Output Code55
4.7 まとめ
この論文では, 入力関数からヒストグラムの形状を数学的に取得するためのアルゴ リズムが考案された. これは, 任意の形状のヒストグラムを作成する入力関数を取得 するためのアルゴリズムを作成する最初のステップである. 検証に単一の正弦波で実行され, 導出アルゴリズムの有効性を示すために良い結果 が得られる. 合成正弦波の場合, アルゴリズムはサンプリングと比較していくつかの エラーがある, その原因を考察した. さらに比較的簡単な合成方法を検討した. 特定 コードに集中するに関することをシミュレーションした. 良い結果が得られる. 次の研究では, アルゴリズムを改善すると論文中合成正弦波計算式の係数関係を研 究することを目指す.56
参考文献
[8] S. Uemori, T. J. Yamaguchi, S. Ito, Y. Tan, H. Kobayashi, N. Takai, K. Niitsu and N. Ishikawa, "ADC linearity test signal generation algorithm", IEEE Asia Pacific Conference on Circuits and Conference, pp.44-47 (2010).
[9] Y. Ozawa, A. Kuwana, K. Asami and H. Kobayashi, "ADC Linearity Testing Using Multi-tone Input Histogram Method", Joint Research Workshop of IEEJ Gunma & Tochigi Sections, Oyama Japan (March, 2019).
57
謝辞
本研究を進めるにあたり, 群馬大学理工学府小林春夫教授より数々のご指導, ご鞭撻 賜りましたことをここに厚く御礼申し上げます. 2 年間でいただいた懇切丁寧なご助言 は本研究を適切な方向に導いてくださり, こうした成果を得ることができました. ま た研究発表や技術研修, 講演会など様々な機会を何度もくださり, 多くの面で成長する ことができました. 心より感謝いたします. 桑名杏奈助教には研究を進める上での様々 なアドバイスやサポートをいただきました. この間でしたがお世話になり, 心より感謝 いたします. また修士論文公聴会主査・副査 弓仲康史先生, 伊藤直史先生には, 心より 御礼申し上げます. 小堀康功先生, 中谷隆之先生, 弓仲康史先生, 松田順一先生, 畠山一実先生, 浅見幸 司先生, 高橋俊樹先生, 源代裕治先生, 田中紘資先生には授業や講演会等で様々な電子 回路の基礎をご教授いただきました. 心より御礼申し上げます.さらに本研究はローム社(ROHM Semiconductor Co., Ltd.)にサポートいただき, 特に佐
藤 賢央氏, 石田 嵩氏, 岡本 智之氏, 市川 保氏(ローム社)には多くの有意義なご意見
をいただきました. 深く感謝いたします. ローム社の皆様には打ち合わせにおいて有意
義な議論を頂きました. 深く感謝いたします. また数々の学会や打ち合わせ, イベント
58
研究業績
国際学会発表
[1] Yujie Zhao, Yuanyang Du, Yuki Ozawa, Yuto Sasaki, Anna Kuwana, Haruo Kobayashi,
Takayuki Nakatani, Kazumi Hatayama, Keno Sato, Takashi Ishida, Toshiyuki Okamoto,
Tamotsu Ichikawa, "Examination of ADC Histogram Test Time Reduction Method". 3rd
International Conference on Technology and Social Science, Kiryu, Japan (8-10 May, 2019)
[2] Yujie Zhao, Anna Kuwana, Yuanyang Du, Yuki Ozawa, Yuto Sasaki, Haruo Kobayashi,
Takayuki Nakatani, Kazumi Hatayama (Gunma Univ.), Keno Sato, Takashi Ishida,
Toshiyuki Okamoto, Tamotsu Ichikawa (ROHM Co., Ltd.), "Examination of Input Signal
to Reduce ADC Histogram Test Time". 5th Taiwan and Japan Conference on Circuits and
Systems (TJCAS 2019 at Nikko), Nikko, Tochigi, Japan, (19-21 August, 2019)
[3] Yuto Sasaki, Yujie Zhao, Anna Kuwana, Haruo Kobayashi, "Highly Efficient Waveform
Acquisition Condition in Equivalent-Time Sampling System", 27th IEEE Asian Test
Symposium, Hefei, Anhui, China (Oct. 2018)
[4] (Invited) Haruo Kobayashi, Yuto Sasaki, Hirotaka Arai, Dan Yao, Yujie Zhao, Xueyan Bai,
Anna Kuwana, "Unified Methodology of Analog/Mixed-Signal IC Design Based on
59 Technology, Qingdao, China (Nov. 2018)
[5] Yujie Zhao, Yuto Sasaki, Yuki Ozawa, Riho Aoki, Anna Kuwana and Haruo Kobayashi,
"ADC Histogram Test for Specific Codes", 5th International Symposium of Gunma
University Medical Innovation and 9th International Conference on Advanced
Micro-Device Engineering, Kiryu, Japan (Dec. 6, 2018)
国内学会発表・研究会発表 [1] 趙 宇杰, 杜 遠洋, 小澤 祐喜, 佐々木 優斗, 桑名 杏奈, 小林 春夫, 中谷 隆之, 畠 山 一実, 佐藤 賢央, 石田 嵩, 岡本 智之, 市川 保,「ヒストグラムテスト法による ADC 試験短時間化のための入力信号に関する考察」 第 72 回システム LSI 合同ゼ ミ, 中央大学, 東京(2019 年 6 月) [2] 趙 宇杰, 杜 遠洋, 小澤 祐喜, 佐々木 優斗, 桑名 杏奈, 小林 春夫, 中谷 隆之, 畠 山 一実, 佐藤 賢央, 石田 嵩, 岡本 智之, 市川 保, 「ADC ヒストグラムテスト時 間短縮法の検討」第 9 回 電気学会東京支部栃木・群馬支所 合同研究発表会, ETG-19-25, ETT-ETG-19-25, 小山高専 (2019 年 3 月) 受賞
[1] Best Student Presentation Award: 3rd International Conference on Technology and Social