在宅環境における睡眠時生体情報 モニタリングシステムおよび
医療・福祉支援システムの構築
(平成20年度 法政大学 学位論文)
法政大学大学院 工学研究科 システム工学専攻 博士課程
栗原 陽介
1章 序論 ... 1
1.1 背景 ... 1
1.2 本論文の構成 ... 2
2章 在宅介護における FIM 値推定法 ... 7
1. 座位からの立ち上がり動作における FIM 値推定法 ... 8
1.1 はじめに ... 8
1.2 対象動作と問題の記述 ... 9
1.2.1 立ち上がり動作 ... 9
1.2.2 機能的自立度評価法(FIM) ... 11
1.2.3 問題の記述 ... 11
1.3 計測システムと評価法 ... 11
1.3.1 計測システムと評価パラメータ ... 11
1.3.2 FIM 値推定法 ... 14
1.4 既存の 3 次元動作解析システムとの比較 ... 15
1.4.1 実験方法 ... 15
1.4.2 結果と考察 ... 16
1.5 臨床実験 ... 18
1.5.1 実験方法と被験者 ... 18
1.5.2 結果と考察 ... 18
1.6 むすび ... 21
2.仰臥位から端座位への起き上がり動作における FIM 値推定法 ... 24
2.1 はじめに ... 24
2.2 対象動作 ... 25
2.3 機能的自立度評価法(FIM) ... 26
2.4 計測システムおよび評価法 ... 27
2.5 臨床実験 ... 32
2.5.1 被験者および実験方法 ... 32
2.5.2 結果および考察 ... 32
2.5.3 推定式を用いた FIM 値の推定 ... 36
2.6 まとめ ... 36
3章 在宅環境における無拘束睡眠評価法 ... 41
1. ユビキタス健康モニタリングにおけるネットワーク端末としての 空気圧方式の信頼性 ... 42
1.1 はじめに ... 42
1.2 システムと問題の記述 ... 43
1.2.1 健康モニタリングのためのユビキタスネットワーク 43 1.2.2 空気圧方式の生体計測用ベッドとネットワーク ... 44
1.2.3 問題の記述 ... 47
1.3 実験 ... 48
1.3.1 被験者 ... 48
1.3.2 計測 ... 48
1.4 結果 ... 48
1.4.1 空気圧方式によるリアルタイム生体情報計測 ... 48
1.4.2 睡眠時無呼吸症候群及び不整脈の検出 ... 52
1.4.3 一分および一晩ごとの健康管理情報 ... 53
1.4.4 一週間および一年ごとの健康管理情報 ... 55
1.4.5 空気圧方式による生体情報の信頼性 ... 58
1.5 考察 ... 63
1.6 むすび ... 65
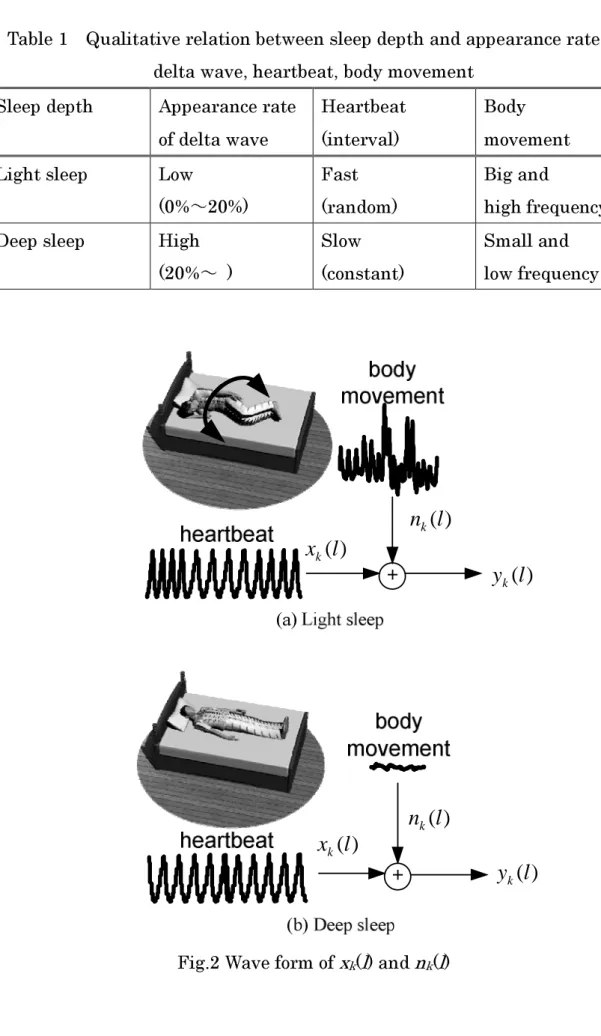
2. 睡眠時における脈波の相互情報量によるデルタ波出現率の推定... 69
2.1 はじめに ... 69
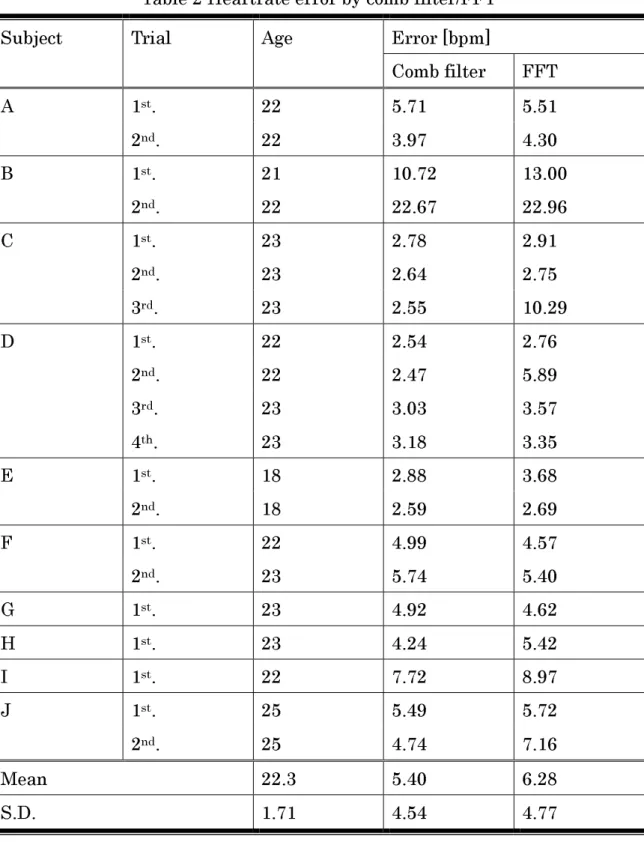
2.4 くし型フィルタによる体動成分の抽出 ... 75
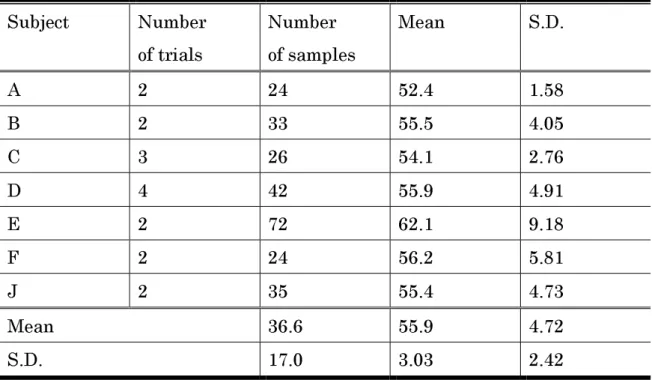
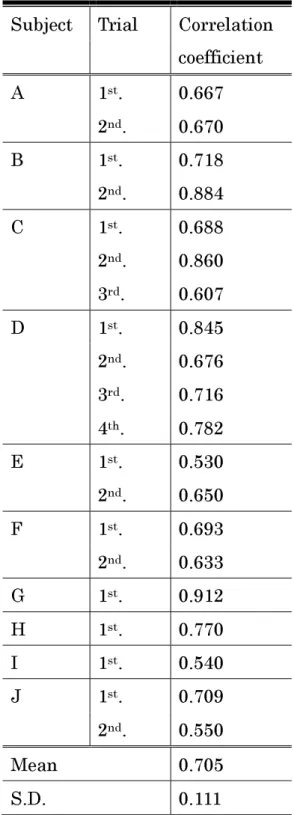
2.5 検証実験 ... 78
2.5.1 被験者および実験システム ... 78
2.5.2 くし型フィルタの精度および体動成分の分離 ... 79
2.5.3 デルタ波の推定結果および考察 ... 84
2.6 むすび ... 90
3. 無拘束生体計測による睡眠指標と睡眠段階の推定 ... 93
3.1 はじめに ... 93
3.2 空気圧方式による生体計測法と問題の記述 ... 94
3.2.1 空気圧方式 ... 94
3.2.2 問題の記述 ... 95
3.3 くし型フィルタ... 95
3.4 睡眠指標 ... 99
3.4.1 REM 睡眠を特徴づける指標 ... 99
3.4.2 覚醒,Non-REM 睡眠を特徴づける指標 ... 100
3.5 睡眠段階の推定... 101
3.5.1 年齢別の睡眠段階の出現率 ... 101
3.5.2 睡眠段階の推定 ... 104
3.6 検証実験 ... 106
3.6.1 被験者と実験環境 ... 106
3.6.2 くし型フィルタの有効性 ... 107
3.6.3 REM 睡眠指標の妥当性の検証 ... 110
3.6.4 睡眠深さ指標の妥当性の検証... 111
3.6.5 睡眠段階の推定 ... 113
3.7 考察 ... 116
3.8 むすび ... 116
4.2 睡眠段階遷移方程式および遷移確率行列 ... 120
4.3 睡眠段階出現確率観測器 ... 123
4.3.1 観測器 ... 123
4.3.2 睡眠段階観測値 yp(k)... 124
4.4 検証実験 ... 130
4.4.1 被験者および実験環境 ... 130
4.4.2 睡眠段階遷移方程式の推定 ... 131
4.4.3 観測器と特性根の最適推定 ... 134
4.4.4 空気圧方式による睡眠段階の推定 ... 135
4.4.5 睡眠段階出現確率の推定 ... 138
4.5 むすび ... 142
付録:睡眠段階の割り当て ... 144
4章 ストレッチャー搬送時における空気圧方式を用いた脈波,呼吸計測 および動的閾値法による呼吸停止検知 ... 147
1. ストレッチャー搬送時における脈波,呼吸計測 ... 148
1.1 はじめに ... 148
1.1.1 研究背景 ... 148
1.1.2 研究課題 ... 150
1.2 方法 ... 153
1.2.1 差動方式による雑音抑制 ... 153
1.2.2 機械的防振対策 ... 159
1.2.3 ストレッチャー走行時の実験方法 ... 163
1.3 実験結果および考察 ... 163
1.3.1 ストレッチャー搬送時の脈波と呼吸計測 ... 163
1.3.2 呼吸停止の検出 ... 166
1.4 むすび ... 167
2.2 空気圧方式と問題の記述 ... 172
2.3 ストレッチャー走行時の振動雑音の抑制 ... 175
2.3.1 振動雑音抑制システム ... 175
2.3.2 振動抑制システムの精度の検証 ... 178
(ⅰ) 実験システムおよび方法 ... 178
(ⅱ) 結果および考察 ... 180
2.4 呼吸停止検知 ... 181
2.4.1 ノイズトレース式動的閾値法... 181
2.4.2 呼吸停止検知時間の誤差評価... 188
(ⅰ) 実験方法 ... 188
(ⅱ) 結果および考察 ... 188
2.4.3 呼吸停止検知率の検証 ... 189
(ⅰ) 実験方法 ... 189
(ⅱ) 結果および考察 ... 189
2.5 むすび ... 191
5章 在宅介護における嚥下能力評価システムの構築 ... 193
1.光センサを用いた先行時間,頤舌骨筋筋力,甲状舌骨筋筋力の 推定および嚥下能力評価法 ... 194
1.1 はじめに ... 194
1.2 嚥下運動 ... 195
1.3 嚥下能力評価システム ... 197
1.3.1 嚥下能力評価用パラメータ ... 197
1.3.2 光センサによる先行時間,頤舌骨筋筋力,甲状舌骨筋 筋力の推定 ... 198
1.3.3 嚥下年齢の推定 ... 200
1.4 検証実験 ... 201
1.5 結果および考察... 203
1.6 むすび ... 210 6章 結論 ... 215 発表論文一覧 ... 219
第 1 章 序論
1.1 背景
日本では,出生率の低下や平均寿命が延びたことなどにより,高齢社会を迎 えている.厚生労働省の推計では,高齢化は今後ますます進んでいくと予想さ れており,65 歳以上の人口の割合は,2015 年には 25%に,2045 年には 32%
に達すると見込まれている.高齢者になると,体の機能低下や様々な疾患を患 いやすくなる.例えば,睡眠の質が低下するにともない疲労が回復しづらくな ったり,脳血管疾患が発症しやすくなるため,運動機能の低下や寝たきり,嚥 下障害などの後遺症が発生したりする.従って,このような状況において,高 齢者が健康的な生活を送るためには,健康の維持/促進が重要な要素となる.こ のためには,医療機関や福祉施設などのサービスの充実が必要である.しかし,
高齢者による医療・介護の需要の増加はこれら諸機関の負担を増大し,サービ スの質を低下してしまう懸念がある.
このような背景において,日々の健康状態を在宅環境でモニタリングできる システムや,リハビリテーションにおける福祉支援システムの発展は,様々な 疾患の予防や早期発見だけでなく,医療機関や介護者の負担を軽減することに もつながる.本論文では,在宅健康モニタリングシステムおよび福祉支援シス テムの構築について述べる.
1.2 本論文の構成
本論文では,在宅環境における睡眠時生体情報モニタリングシステムおよび
医療・福祉支援システムの構築を目的とし,2 章~5 章において具体的に以下の 問題を扱う.
・2 章:「在宅介護における FIM 値推定法」
リハビリテーションにおいて方針を決定するためには,低下した機能がどの 程度回復しているかを日々,評価する必要がある.機能回復の評価方法として,
機能的自立度評価法(FIM:Functional Independence Measure)がある(FIM についての詳細は 2 章の 1.2.2 節を参照).しかし,FIM 値を評価するためには,
一定の訓練,経験を積んだベテランの看護師による必要があるため,在宅でリ ハビリテーションを行っている患者において,日々の FIM 値を評価することは むずかしい.本章では,ジャイロセンサを用いることで,被験者の上半身の動 作を計測し FIM 値を推定する方法について以下の 2 テーマについて述べる.
(1) 座位からの立ち上がり動作における FIM 値推定法
脳血管疾患の患者を被験者とし,「座位からの立ち上がり動作」における 前屈,後屈運動に伴う上体の最大角速度をジャイロセンサで計測する.こ の値と看護師により定性的に評価された FIM との関係性を表す数学モデル を構築し,ジャイロセンサ出力から FIM を推定する方法について述べる.
(2) 仰臥位から端座位への起き上がり動作における FIM 値推定法
脳血管疾患の患者において,寝たきりを防ぐためには「仰臥位から端座位 への起き上がり動作」の獲得が必要となる.ジャイロセンサを用いて,上 半身の運動を計測し,FIM 値を推定する方法について述べる.
・3 章:「在宅環境における無拘束睡眠評価法」
睡眠はヒトにとって人生の約 1/3 を占める休息,安らぎの時間であり,脳と身 体の疲労を回復するための重要な役割をもっている.しかし,加齢や生活習慣 病における心疾患,睡眠時無呼吸症候群などにより睡眠の質が低下すると,健 康の維持/増進が困難になる.睡眠の質を,ネットワークを通して管理すること ができれば,健康管理における一助となる.本章では,睡眠中の脈波,呼吸,
イビキ,体動を計測できる空気圧方式を用いて,睡眠を評価法する方法につい て,以下の 4 テーマについて述べる.
(1) 睡眠時のユビキタス健康モニタリングにおけるネットワーク端末としての 空気圧方式の信頼性
空気圧方式の無拘束生体計測システムについて,健康管理ネットワーク の端末として管理が可能な情報とシステムの信頼性を,32 名の被験者に対 し 14 ヶ月間のフィールドテストを実施した結果から検討する.
(2) 睡眠時における脈波の相互情報量によるデルタ波出現率の推定
睡眠の質は,睡眠中の脳波,眼球運動,顎筋電から R-K 法や American Academy of Sleep Medicineによる睡眠段階判定マニュアルをもとに判定 された睡眠段階により評価される.しかし,脳波,眼球運動,顎筋電の計 測には電極を体に設置する必要があるため,煩わしく日々計測するのは難 しい.在宅環境で,無拘束に睡眠中の脳波,顎筋電,眼球運動を計測もし くは,推定することができれば,日々の睡眠の質をモニタリングすること ができ,在宅健康モニタリングにおいて有効である.本論文では,筆者ら がこれまで提案してきた空気圧方式において,無拘束で得られる脈波信号 に対する平均相互情報量をもとに,睡眠の深さと関係があるデルタ波の出 現率を推定した.
(3) 無拘束生体計測による睡眠指標と睡眠段階の推定
空気圧方式により計測した脈波と体動から REM 睡眠の状態を表す指標
と睡眠の深さを表す指標を定義する.また,年齢ごとに各睡眠段階の平均 出現率と標準偏差を求める関数を決定する.これらの 2 つの睡眠に関する 指標と,関数を用いて R-K 法流の睡眠段階を推定するアルゴリズムについ て述べる.
(4) 睡眠段階遷移方程式と睡眠段階出現確率の推定
睡眠段階の判定において,国際標準である R-K 法を使用する際,判定者の 主観により判定結果が完全に一致することは難しい.睡眠段階の遷移に関
して,共通する特性を表すモデルにより判定結果を是正し,個別判定の不 確定性を吸収することができれば,睡眠段階判定の信頼性向上につながる.
睡眠段階の遷移に関して共通する特性を表す方程式(睡眠モデル)により判 定結果を是正し,個別判定の不確定性を吸収する方法について述べる.
・4 章:「ストレッチャー搬送時における空気圧方式を用いた脈波,呼吸計測お よび動的閾値法による呼吸停止検知」
病院などの医療機関にいて,手術後の患者の搬送にはストレッチャーが使さ れる.この術後の患者搬送において,麻酔効果による呼吸停止野心停止などの 医療事故の危険性が高い.ストレッチャーでの搬送時は,走行に伴う振動によ り,看護師の看護師の誤認や,搬送に気を取られ,患者の異変に気がつかない ことがある.本章では,空気圧方式を用いてストレッチャーの搬送者の確認行 為を支援するためのシステムについて以下の 2 テーマについて述べる.
(1) ストレッチャー搬送時における脈波,呼吸計測
ストレッチャーで搬送中の被験者の脈波および呼吸を計測するため,空気 圧方式に対し,差動方式と防振装置により走行振動雑音を軽減させる方法 について述べる.
(2) 動的閾値法による呼吸停止検知法
(1)の差動方式および防振装置をベースとし,動的閾値法を用いることで,
ストレッチャー搬送中の走行雑音に対しロバストな呼吸停止検知法につい て述べる.
・5 章:「在宅介護における嚥下能力評価システムの構築」
食事は,人間にとって重要な行動であるが,脳血管疾患の後遺症や,加齢にと もなう筋力・神経系の機能低下にともない,正常に飲食物を飲み込めない嚥下 障害が発生してしますことがある.嚥下障害による誤嚥を防ぐためには,嚥下 機能を評価し,適切なメニューを選択する必要がある.しかし,嚥下機能を評 価する方法としては,嚥下造影などの大規模なシステムが必要となる.本章で
は,光センサを用いた嚥下機能評価法について述べる.
(1) 光センサを用いた先行時間,頤舌骨筋筋力,甲状舌骨筋筋力の推定および 嚥下能力評価法
嚥下能力の評価に重要な先行時間,頤舌骨筋筋力,甲状舌骨筋筋力を推定 する方法について述べる.また,総合的な嚥下能力を表す指標として,嚥 下年齢を推定する方法について述べる.
第 2 章
在宅介護における FIM 値推定法
1. 座位からの立ち上がり動作における FIM 値推定法
Abstract : In Japan 28.6% of people who require the nursing care are the prolonged bedrest. In order to prevent to be the prolonged bedrest and to improve their Activities of Daily Livings (shortly ADL), rehabilitations by balance keeping in a standing posture and walking training are effective.
Here we focus on the standing up motions which are prerequisite for the balance keeping and walking. When standing up, the forward and backward bending occur and the motions are related with their weakness. Patients suffering from cerebrovascular disease were selected as subjects for experiments. The maximum angular velocity of upper part of body when standing up measured was compared with the Functional Independence Measure (shortly FIM) determined qualitatively by nurses. The sigmoid function and third-order polynomial functions were employed as mathematical models to estimate the FIM and they showed the correlations of 0.81 and 0.83 respectively. By the high correlation, we can show one a measure (estimate of FIM) to evaluate the motions. The evaluation for stand-up by the measure can provide information to give how to improve the ADL.
1.1 はじめに
わが国における要介護者数は 2001 年度において約 124 万人である[1].この うち,長期臥床患者数は約 36 万人にのぼり,要介護者全体の約 28.6%を占める.
長期臥床を原因別にみると,「脳血管疾患」が全体の 36.7%と最も高く,運動麻 痺や歩行障害などの後遺症を抱え,不自由な生活を強いられている.このよう な患者の数は増加の一途をたどっている.
障害の程度が更に悪くなることを防ぎ,残っている機能を維持・向上させる ための医学的な手段として,リハビリテーションがある.リハビリテーション 効果は機能的自立度評価法(FIM; Functional Independence Measure 以下 FIM と記す)によって,各患者の多岐にわたる障害の回復過程毎に評価されてい る.
特に長期臥床に対してのリハビリテーションでは,立位平衡や歩行能力の回
復の重要性が,多くの研究で報告されている[2,3].また,それらの動作を可能 にするための立ち上がりも理学療法場面で重要な動作として扱われている[4].
一方,医療の効率化, 病院在院期間の短縮を目指したクリティカル・パス政策 の導入は,例えば,立ち上がり動作を獲得する前に退院を余儀なくしている現 実がある.在宅でどの程度までリハビリテーションが進んだかを簡単に評価で き,次の目標を与え,リハビリテーションのモチベーションの向上を促す方法 と器具の構築が必要となってきている.
立ち上がり動作を評価する代表的方法としては,被験者の体に赤外線の反射 マーカーを付け,複数台のカメラで動作を撮影し,その撮影された画像を解析 するものが主である[5,6].しかし,この方法は拘束性が強く,麻痺患者にとっ てカメラ撮影という心理的な侵襲性があること,システムが大掛かりとなるこ とから在宅での使用は現実的でない.本研究はこの動作による運動を在宅でも 手軽に計測,評価できるようにし,介護介入による機能回復の効果を定量的に 確認できる方法の構築を目指す.これにより要介護者は自らの日常生活動作
(ADL)の回復状況を把握することができ,リハビリテーションのモチベーシ ョン向上に繋がる.
1.2 対象動作と問題の記述 1.2.1 立ち上がり動作
世界保健機関の定める障害は,種々の疾病による身体障害を 3 つの相に分類
し,その程度を評価することになっている.第 1 相は機能障害(impairment),
第 2 相は能力低下(disability),第 3 相は社会的不利(handicap)である.各相は いずれも重要な要素であるが,リハビリテーション効果の評価については,機 能障害は疾病固有の評価,能力低下は疾病から独立した評価のあり方を模索す る傾向がある.
長期臥床の予防のため,リハビリテーションにおいては,早期から体を動か し,残された機能を低下させないことが重要とされている.つまり,障害分類 第 2 相に含まれる ADL に注目した評価が重要である.本論文では ADL の中の 立位平衡や歩行の前提となる「座位からの立ち上がり」を対象動作とし,定量 評価する.
健常者における座位からの立ち上がり動作を Fig.1 に示す.立ち上がり動作は 矢状面における関節角度の特性から屈曲相と伸展相の 2 相に分類できる[7].
(ⅰ) 座位 : 重心に作用する身体加重を座骨でうけている姿勢
(ⅱ) 屈曲相(第 1 相) : 重心を前方に移動するために頸部・体幹を前傾に屈曲さ せ,さらに体幹・膝を前方へ進めることで重心を足部に移動する相
(ⅲ) 伸展相(第 2 相) : 重心を上に移動して立ち上がる相 (ⅳ) 立位 : 足で重心に作用する身体荷重を受ける姿勢
(ii) Bending Phase (iii) Dilatation Phase
(i) Sitting Position (ii) Bending Phase (iii) Dilatation Phase (iv) Standing Position
(i) Sitting Position (iv) Standing Position
Forward bending Backward bending
Fig.1 Assessment motion (Standing up from chair)
体幹の動きに注目し,Fig.1を見る.立ち上がり動作では股関節を中心に体幹を 前屈させ,引き続き股関節を中心に後屈させるという回転運動を行っている.
一般に脳血管疾患による片麻痺患者は,立ち上がり動作の屈曲相での股関節屈 曲が困難である。このため,体幹を捻じったり,左右に揺らしたりしながら立 ち上がろうとするが,体重の前方移動が不十分であり,スムーズな立ち上がり が難しい.この股関節屈曲の困難さに対し,介護者が患者の前方に目標物を設 定し体幹前傾を促すことで,立ち上がりが結果的にスムーズになるというよう な臨床場面が認められる[7].以上より,立ち上がり動作の評価をする観点から 体幹の前後傾,捻れ,左右の揺れが重要な指標になりえる.
1.2.2 機能的自立度評価法(FIM)
本論文では提案するリハビリテーション効果の評価の指標を検討するために FIM を利用する.FIM は「できる」ADL 評価でなく,「している」ADL 評価に よって介護負担度を測定することを特徴としている.内容は全 18 項目を 7 段階 に能力分類するもので,ADL に必要な項目をすべて網羅するのではなく,必要 最低限の項目に限られている.全ての項目において完全自立可能であれば 126 点(運動項目 91 点,認知項目 35 点),全介助要の状態ならば 18 点(運動項目 13 点,運動項目 5 点)となる.入院中のリハビリテーション治療,訓練による機能 や能力の改善の度合いを,入院時の FIM 総得点から退院時まで何点あがった,
というふうに示される.FIM の妥当性は現在,最も広く使用されている Barthel Index との比較,検出者間信頼性の検討[8,9]により確認されている.
FIM は運動項目に立ち上がり動作を含む移乗が設定され,本論文の提案と関 係が深い.また,立ち上がり動作はその難易度から,運動項目の FIM 値が約 45 点以上必要と考えられる[10].よって本論文では FIM の運動項目点数が 45 点~
91 点にある患者を対象として検討する.
1.2.3 問題の記述
本論文では次の問題(P1),(P2)について検討する.
(P1) 座位からの立ち上がり動作における体幹の運動をどのように簡易に計測 するか.
(P2) (P1)で計測した運動の中のどのような量が FIM と深い関係性を持つか.
1.3 計測システムと評価法
1.3.1 計測システムと評価パラメータ
問題(P1)について検討する.立ち上がり動作は回転運動と併進運動を含ん でいるが,リハビリテーション効果の評価として,1.2.1 に述べたように体 幹の前後傾,捻れ,左右の揺れが指標となる.そのため,立ち上がり動作時の 体幹の回転角度と角速度を計測する.まず Fig.2 に示すようにヒトの腰中央を原 点とし,脊椎方向を y 軸,右大腿骨から左大腿骨方向を x 軸,前方を z 軸とす る相対直交座標系を定義する.
Fig.2 Definition of the local coordinate system for the measurement
x軸周りを Pitch 角,y軸回りを Yaw 角,z軸周りを Roll 角とする.体幹の 前後傾角は Pitch 角,体幹の捻れは Yaw 角,体幹の左右の揺れは Roll 角に対応 する.この相対直交座標系は立ち上がり動作とともに回転・併進する.
角度や角速度はポテンショメータ,傾斜計やジャイロセンサで計測できる.
ポテンショメータは角度計であるが,1 個のセンサにつき 2 ヶ所の設置点が必要 で,被験者の運動の妨げになる.傾斜計は一点設置で済むが計測角度の精度に 少し問題がある.ここではデバイスが小型で比較的安価なジャイロセンサを利 用する.ジャイロセンサは回転角度系であり,積分することで相対角度が求ま る.体幹の前後傾角,捻じれ,左右の揺れは基準角からの角であり相対角で十 分である.
レートジャイロで計測した Pitch,Yaw,Roll の角速度を ωx(t),ωy(t) , ωz(t) とすると Pitch,Yaw,Roll の角度 θx(t),θy(t) ,θz(t)は次のように求まる.
τ
τ ω τ ω τ ω θ
θ
θx(t) y(t) z(t)] =∫0t[ x( ) y( ) z( ) ]d
[ (1)
Fig.3 に計測に使用した 3 次元ジャイロセンサおよび各ジャイロセンサにおけ る角速度計測の座標系を示す.
Fig.3 Definition of the local coordinate system and the gyros
Fig.3 においてGyro Aはz軸周りの角速度,Gyro Bはy軸周りの角速度,
Gyro Cはx軸周りの角速度を計測する.使用したジャイロセンサ単体は(株)村
田製作所ジャイロスターENC-03J であり,そのサイズは 15.5mm×8mm× 4.3mm,重さ2.7gと小型で軽量である.
3 つのレートジャイロをそれぞれが直交するようにして配置した 3 次元ジャイ
ロセンサ部は 50mm×30mm×20mm であるが,計測においてはほとんど影響 を与えない.ジャイロセンサは長時間使用の間にドリフトが生じる可能性があ るが,立ち上がり動作の計測に必要な時間ではこの影響はほとんどない.実際 には立ち上がり動作開始までの静止状態も計測しており,この間で生じるドリ フトをデータから差し引くことで高精度化をはかっている.計測に際しては被 験者の体にスポーツベルトを用いて 3 次元ジャイロセンサ部を固定する.これ により被験者ごとに簡単に設置調整ができる.
この状態で起き上がり動作中の 3 次元角速度を計測する.角速度は A/D 変換し て PC に取り込み,(1)式より Pitch 角,Yaw 角,Roll角を求める.これらのデ
ータから様々な動作評価のパラメータが読み取れるが,ここでは Pitch 角,Yaw 角,Roll 角それぞれの最大角度,最大角速度,最小角速度を評価パラメータと する.
1.3.2 FIM 値推定法
問題(P2),すなわち1.3.1で述べた Pitch 角,Yaw 角,Roll 角それぞれ の最大角度,最大角速度,最小角速度と FIM の関係を調べる.FIM は調査者に よる 7 段階主観評価である.一方ジャイロセンサによる計測値は物理量であり,
これらの関係を直接的に結びつける理論数学モデルは存在していない.よって,
統計的な因果関係モデルを用いるしかない.まず, FIM 値を目的変数(結果),
評価パラメータを説明変数(原因)として多変量解析を施す.この多原因一結 果モデルを一原因一結果と関係を単純化するためにどの評価パラメータが最も FIM と関連が深いかを調べる.この 1 つの評価パラメータ(原因)と FIM 値(結 果)の関係を表す数学モデルとして,シグモイド関数と 3 次多項式関数を選ぶ.
これらの関数に含まれる係数はある被験者グループのデータを用いて決定する.
シグモイド関数は式(2)で与えられる.変数 x はジャイロセンサを用いて計測 した物理量,変数 y は FIM 値に対応する.値域 y は 0~1 の範囲であり上下限 を持つ.また,FIM 値も同様に上下限をもつため,シグモイド関数を選択した.
この関数の勾配と平行移動の量は係数 で決定される.本論文では,立ち上がり 動作を行うことができる対象者の FIM 値が 45 点~91 点であり,これをシグモ イド関数の値域に合わせた0~1に正規化する.また,係数 a,b は遺伝的アル ゴリズムにより決定する.
( )
1 1
b x
e a
y − −
= − (2)
多項式は式(3)で表される.
1 0
2 2 1
1x a x a x a
a x a
y = n n + n− n− + n− n− +⋅ ⋅⋅+ + (3)
この関数による近似は次数により多様なデータにフィッティングが可能である.
しかし,次数を上げると誤差に対してもフィッティングを行う可能性があり,3 次の多項式を選んだ.
1.4 既存の 3 次元動作解析システムとの比較
まず,問題(P1)の解としてジャイロセンサで十分かを検証する.高精度な 動作解析装置である 3 次元動作解析装置から得られた最大体幹前傾角とジャイ ロセンサから得られる Pitch 軸最大角を比較する.
1.4.1 実験方法
既存の動作解析システムとして 3 次元動作解析装置(Oxford Metrics 社製
Vicon370 以下Viconと記す)を用いる.Viconは被験者に取り付けた赤外線反 射マーカーを 7 台のカメラで撮影し,この画像から 3 次元的に動作を解析する ものである.被験者は健常男性6名(平均年齢:25歳,平均身長:171±3.9cm,平
均体重 66.3±7.0kg,下腿長平均 45.2±2.3cm)であり,インフォームドコンセ ントを得ている.
ジャイロセンサと赤外線反射マーカーを被験者に取り付けた様子を Fig.4 に
示す.ジャイロセンサはスポーツベルトで被験者の胸骨に固定し,赤外線反射 マーカーは体の各所,計36点に設置した.ジャイロセンサは被験者上に設定さ れた相対座標系のもとでデータを取得し,Vicon は Fig.4 中にある床反力計の中 心を絶対座標系の原点としてデータを取得した.本実験では,Vicon より得られ た最大体幹前傾角度とジャイロセンサより得られた角度の最大値との関係を求 める.
Gyro Sensor Index
Z O
Y
X
Local Coordinates
Force Plate
Fig.4 Attachment of the gyro sensor and infrared-ray reflection markers
ジャイロセンサにより得た角速度から式(1)により角度を求め,その最大角度 を本システムによる体幹前傾最大角度とし,Viconにおける体幹前傾角度は開始 肢位角(0.5秒間の平均値)と最大屈曲角(最大値)との差とした.
立ち上がり動作は実際のリハビリテーション(患者前方に目標物を設定し体幹 の屈曲を促す動作)を模した形で,以下の二条件のもとで行われた.
条件①:普通の立ち上がり動作
条件②:頭部を胸骨の高さの指標に近づけるようにして立ち上がる動作 指標の高さは座位時の胸骨の高さに設定し,三脚を用いて前方に設置した.
1.4.2 結果と考察
立ち上がり動作におけるジャイロセンサの角度および角速度の時間軸波形を Fig.5 に示す.この波形は 2 章で述べた動きを表している.座位と最終立位では 角度が 15 度ほどずれているが座位では少し後屈し,立位では少し前屈している ためである.角速度は前屈が始まり後屈に切り替わるタイミングで 0 度となっ ている.ジャイロセンサと Vicon による最大前傾角を散布図にした結果を Fig.6 に示す.
0 1 2 3 4 5 6 7 8 9 10 -20
-15 -10 -5 0 5 10 15 20 25
Time [sec]
Angle [deg.]
0 1 2 3 4 5 6 7 8 9 10
-80 -60 -40 -20 0 20 40 60 80
Time [sec]
Angular Velocity [deg./sec]
Sitting Position Bending Phase Dilatation Phase Standing Position
Fig.5 Angle and angular velocity
Gyro [deg]
25 30 35 40 45 50 55 60 65 70 75
20 25 30 35 40 45 50 55 60 65 70
Vicon [deg]
Fig.6 Correlation between the gyrosensor and Vicon
体幹の前傾角の平均は条件①において Vicon で 37.6 度,ジャイロ法で 39.7 度と差は 2.1 度,条件②において,それぞれ 56.5 度と 57.3 度となり差は 0.8 度 となった.これらの差はヒトの立ち上がり動作計測では問題にならない.また それぞれの計測機器において,条件①の場合と条件②の場合の前傾角の差は有 意に大きいことがわかる.すなわち頭部を前方の視覚目標に対して下げたこと が体幹前傾角を増加させたと考えられる.
Fig.6 の散布図において本システムと Vicon の最大前傾角間の相関係数は 0.92(5%水準で有意)と高い.以上より,本システムが立ち上がり動作のリハビ リテーション効果を評価する計測機器として,Fig.4 に示すような大型(高価)
で拘束性が強いシステムと同等の精度で前傾角を計測することが可能であるこ とがわかる.また,小型のジャイロセンサ 1 つで計測できるため,一般家庭に 持ち込むことが容易である.
1.5 臨床実験
(P2)について実験検証する.脳血管疾患の後遺症による身体麻痺を有し,リ ハビリテーション中の患者の立ち上がり動作をジャイロセンサで計測すると共 に,FIM 値をベテラン看護師に評価してもらい,これらの関係を検証すること でリハビリテーション効果を評価する.
1.5.1 実験方法と被験者
被験者は患者 20 名(62.7±9 歳,FIM 値 45 以上)と健常者 5 名を対象とし,
インフォームドコンセントを得た上で計測した.
被験者には,胸骨上にジャイロセンサをスポーツベルトで取り付け,ベッド サイドに端座位の姿勢をとってもらい,合図に従って立ち上がり,車椅子に座 るという動作を行ってもらった.AD 変換サンプリング間隔 0.05sでデータを 取得した.
1.5.2 結果と考察
ジャイロ方式で得られたデータより,Pitch 角,Yaw 角,Roll 角の最大角度,
最大角速度,最小角速度を求め,併せて FIM 値の評価を行った.立ち上がり動
作の全計測回数は同一被験者の複数回計測も含め 46 回である.そのうち無作為 に取り出した 25 データを用いて,多変量解析を施し,シグモイド関数,3 次多 項式によるモデリングを行う.ジャイロセンサから求めた Pitch 角,Yaw 角,
Roll 角の最大角度,最大角速度,最小角速度を説明変数とし,FIM 値を目的変 数として重回帰分析を施した結果,Pitch 角の最大角速度が大きな影響を与える ことがわかった.そこで Pitch 角の最大角速度を説明変数,FIM 値を目的変数 として与え,シグモイド関数と 3 次多項式によりモデルを作った.Fig.7 に示す・
印は FIM 値と Pitch 角の最大角速度の散布図である.シグモイド関数によるモ デリングにおいて,遺伝的アルゴリズムを使用し,残差二乗和を最小となるよ うに推定した(2)式の係数 a,b は a=4.87, b=1.25 となった.3 次多項式モデ ルでは,最小二乗法を用いて係数を求めた.その結果,多項式の次数を 3 以上 にしてもモデルの精度はあまり変わらないことがわかった.シグモイド関数に よるモデルと 3 次多項式近似式によるモデルをそれぞれ式(4),(5)に示す.それ ぞれの決定係数を記し,また実線と破線を用いて Fig.7 上に示す.
45
1
46
) 25 . 1 ( 87 .
4 +
= + − x−
y e (4)
(R2=0.81)
y=−1.81×10−4x3+3.19×10−2x2 −1.09x+6.43×101 (5)
(R2=0.83)
Fig.7 には,角速度の最大値から FIM を推定するモデルを示している.実線は シグモイド関数(4)式,破線は 3 次多項式(5)式のモデルである.
FIM 値と最大角速度の決定係数は,シグモイド関数で 0.81,3 次多項式関係 で 0.83 と高い値が得られた.これは Pitch 軸の最大角速度が大きくなると,FIM の得点が高くなることを示している.
計測データの中から式(4)(5)のモデル推定に使わなかった 4 データについて,
最大角速度より FIM 値を推定した.Table 1 に FIM 値とシグモイド関数,3 次 多項式関数モデルで推定した FIM 値をそれぞれ示す.
最大角速度から推定した FIM 値の二乗平均平方誤差(RMSE)は,シグモイド関 数モデルの場合 3.20,3 次多項式関数モデルの場合 3.35 程度である.それぞれ の関数の特性により,RMSE に大きな違いは見られなかった.検証数としては 充分とはいえないが,一定の精度で FIM を推定している.
10 20 30 40 50 60 70 80 90 100
45 50 55 60 65 70 75 80 85 90 95
Angular velocity [deg/sec]
FIM
Sigmoid
Third-order polynomial
Fig.7 Relation between the angular velocity and FIM
Table1 FIM and estimated FIM from the maximum angular velocity Subject FIM Pitch_
vmax Sigmoid function Polynomial approximation technique
Estimated
value Error Estimated
value Error
a 91 80.3 87 4 87 4 b 74 61.4 77 -3 76 -2 c 50 24.0 50 0 54 -4 d 71 48.6 67 4 68 3
1.6 むすび
問題(P1)に対し,「座位からの立ち上がり動作」を計測するためジャイロセン サを用いる方法を提案した.問題(P2)に対し,ジャイロセンサ信号から FIM に最も影響を与える量として,Pitch 最大角速度を示し,この量から FIM 値を 推定するモデルとしてシグモイド関数および 3 次多項関数を選び,FIM 値推定 モデルを構築し実験的に論述した.立ち上がり動作の回転運動がジャイロセン サにより正確に行われているか否かを検討するために 3 次元解析動作解析シス テムとジャイロセンサの両方で体幹前傾角度の最大値を計測した.これらの相 関係数は 0.92(5%水準で有意)であった.次に Pitch 角の最大角速度と身体麻痺 患者からのシグモイド関数を用いたモデルでは,FIM 値と推定値の決定係数が 0.81,3 次関数を用いたモデルでは決定係数が 0.83 であった.無作為に取り出 したモデル構築に使わなかったデータの FIM 値の推定を行ったところ,シグモ イド関数モデルによる真値との RMSE が 3.20,3 次多項式関数モデルによる誤 差が 3.35 であった.
ジャイロセンサは小型である.介護者の手のひらにこのセンサを入れ,その 手を被介護者の背中に添え,全く力を加えることなく,被介護者の動作に合わ せて動かすことで,FIM の推定値が決まる.きわめて簡単に FIM 値が推定でき
る.これにより在宅でリハビリテーションに励む患者に,その値がリアルタイ ムで知らせることが出来る.これは患者のリハビリテーションのモチベーショ ンを上げ,ADLの向上につながる.
参考文献
[1] 平成 13 年度国民生活基礎調査
[2] Tsuruoka,M:Spectral analysis of standing balance using medical stereo images, Archives of 19th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 1671-1674,1997.
[3] 堀内郁考,角屋利恵子,湯地忠彦,東祐二,藤元登四郎,関根正樹,田村俊 世:脳卒中片麻痺における転倒と腰部加速度との関連性について.第 16 回
生体・生理シンポジウム論文集.2001, pp117-120
[4] 小島悟,田中敏明,橋本伸也,武田秀勝:力学モデルを用いた椅子からの立 ち上がり動作分析-足部位置ならびに体幹前傾量の影響-.札幌医科大学保 健医療学部紀要第 2 号,1999, pp25-31
[5] 有川仙子,土井英子,椋代弘:看護者のベッドから車椅子移動時のボディメ カニクス-動作分析による実験研究-.第 16 回リハ工学カンファレンス,
2001, pp585-588
[6] 定岡加恵,平野陽子:看護婦の看護行為における身体への負担について-ボ ディメカニクスの視点より-.第 16 回リハ工学カンファレンス,2001, pp589-592
[7] 山本康稔,加藤宗規:腰痛を防ぐらくらく動作介助マニュアル.医学書院,
東京,2001, pp38
[8] 中島恵子,園田茂:脳卒中患者における機能的自立度評価法(FIM)の認知 項目と適応行動尺度(ABS)との関係.総合リハビリテーション学会第 23 巻 8 号,1995, pp685-688
[9] 園田茂:障害評価手段開発の背景と現状.総合リハビリテーション学会第 23 巻 4 号,1995, pp279-285
[10] 千野直一,里宇明元,園田茂,道免和久:脳卒中患者の機能評価 SIAS と FIM の実際.シュプリンガー・フェアラーク東京,東京,1997, pp131-133
2. 仰臥位から端座位への起き上がり動作における FIM 値推定法
Abstract :In Japan, 1.4 million patients currently suffer from paralysis due to impairments to blood vessels in the brain. In order to prevent them from being bed-ridden and to enable them to lead an independent daily life, significant of recovering their abilities in keeping the balance while standing and in walking by their own feet has been significant, and many research activities have been focused to evaluate these abilities. However, there have been few that focus on the bodily motion in sitting up on the bed, although every patient must follow this step before going into the standing position. In this research, the sitting up motions were measured by gyro sensors to obtain parameters to construct a system for quantitatively evaluating the posture changes and estimate FIM.
2.1 はじめに
日本では,高齢化社会の到来と共に脳血管疾患による運動麻痺や歩行障害な どの後遺症を持ったまま寝たきりとなってしまい,不自由な生活を送ることを 余儀なくされる患者が約 140 万人いる[1].麻痺を持つ患者の多くは,自立した 日常生活を送れなくなると,これが原因で正常な機能も衰え,寝たきりとなっ てしまう.寝たきりにならないためには,自立した生活を送れるようになるた め,リハビリテーションにより低下した機能を回復させる必要があるが,苦し い動きを継続しなければならないリハビリテーションの途中でモチベーション が低下してしまうこともある.リハビリテーションにおいて,低下した機能が 回復していく過程を患者自身が客観的に確認できることは,モチベーションの 向上につながる重要な要素である.
リハビリテーションにおいて,低下した機能がどの程度回復したかを評価す る指標として,機能的自立評価法(FIM : Functional Independence Measure 以 下 FIM と記す)がある.しかし,FIM 値を評価するためには,一定の訓練を 積んだベテラン看護師による必要があり,手軽かつ正確に評価するのは難しい.
在宅で FIM 値を誰でも手軽に確認できれば,FIM 値をベテラン看護師に評価 してもらわなくて済み,自身の日常生活動作(ADL:Activities of Daily Living)
の回復状況を日々把握することができるため,リハビリテーションへの励みに なる.
ADL の動作項目において,立位平衡や歩行能力の獲得が最も重要と考えられ ており,そのための様々な研究がなされている[2],[3].また,立位平衡や歩行 能力の獲得を行うための立ち上がり動作,歩行動作も重要な動作として理学療 法現場で取り組まれている[4].しかし,寝たきりの状態からリハビリテーショ ンが始まる場合,立位平衡や歩行能力を獲得する前に“ ベッドに仰臥位に寝た 状態から端座位の姿勢をとる”という動作(以下対象動作と呼ぶ)の機能獲得 が必要であるが,この動作を対象とした研究はほとんどない.従来,立ち上が り動作などの運動解析は,赤外線反射マーカーを被験者に設置し,複数台のカ メラで撮影し動作の解析を行っている[5],[6].この手法では,麻痺を持ち体の 不自由な患者を拘束し,カメラ撮影という心理的侵襲を与えてしまうという問 題がある.さらに,計測システムが大掛かりで,手軽に在宅などで計測を行う ことは難しい.筆者等はこれまで,ジャイロセンサを用いて在宅環境で簡易に
“ 椅子からの立ち上がり動作”から FIM 値を推定する方法を提案してきた 7).
本論文では,ジャイロセンサを用いて在宅で手軽に対象動作を計測し,麻痺患 者自身が対象動作を行うだけでリハビリテーションにおける機能回復効果の確 認ができるモデルの構築および FIM 値推定を目的とする.
2.2 対象動作
麻痺患者が寝たきりにならないためのリハビリテーションにおいては,麻痺 になってしまった早期から体を動かし,残された機能を衰退させないことが重 要とされている.つまり,ADL に注目した評価が大変重要である.本論文では,
立位平衡や歩行の前段階として必要な“ ベッドに仰臥位に寝た状態から端座位 の姿勢をとる”という動作を対象動作とし,日常生活動作能力を定量評価する 方法を考える.
Fig.1 に対象動作の開始(ベッド上に仰臥位) から終了(ベッドの端に端座位) までの一連の動作を示す.この動作は,
(a) ベッド上に仰臥位(仰向けに寝た状態)
(b) 上半身の起き上がり
(c) 臀部を中心に回転
(d) ベッドの端に足を下ろす
(e) ベッドの端に端座位(足を下ろして座る状態)を保つ
の 5 つの動作からなる.ここで,被験者の拘束性を軽減すると共にシステムを できるだけシンプルにするために,対象動作中の上半身の運動に注目する.こ のとき,人の腰中央を原点とし,脊髄方向(前額面)を y 軸,右大腿骨から左 大腿骨方向(水平面)を x 軸,前方から後方(矢状面)を z 軸とする相対直交 座標系を定義すると,この座標系は被験者の動作に合わせて移動する.この対 象動作においてFig.1 からも分かるように,回転運動が主である.
Fig.1 Get up from dorsal position to the edge sitting position
2.3 機能的自立度評価法(FIM)
本論文では,患者の運動機能回復の指標として FIM を用いる.FIM は,能
力低下を評価するため,どのような疾患にでも適用できる“ 機能的自立度評価 法”である.その特徴は,患者に動作をさせて採点する「できる」ADL 評価で なく,日常生活で実際にどのように行っているかを観察し採点する「している」
ADL 評価である.FIM は,ADL の各項目を7段階に能力分類し,13 個の運 動項目と,7 個の社会的認知項目で構成されている.各項目に対し 1 点から 7 点 で評価し,全ての項目において患者が完全自立であれば 126 点(運動項目 91 点,
認知項目 35 点)となる.また,ADL が全介助の状態は 18 点(運動項目 13 点,
認知項目 5 点)となる.入院中のリハビリテーション治療,訓練による機能や 能力改善度合いが,入院時から退院時までの FIM 総得点で評価されたり[8],
FIM 値の運動項目の合計点数から在院日数や,退院した後の ADL の変化を予 測したり 9),10)と,FIM の合計得点が重要な指標となる.FIM の妥当性は 現在,Barthel Index との比較,検出者間信頼性の検討[11]~[13]により確認さ れている.
本論文では,FIM における運動項目を対象とし,FIM 値の推定を行う.な ぜなら,認知項目は,コミュニケーション能力や社会的認知といったように,
運動とは関係のない項目の評価であり,患者とコミュニケーションをとりなが ら採点することが望ましいからである.対象動作から FIM における運動項目の 合計点数を推定する方法を提案する.
2.4 計測システムおよび評価法
2.4.1 計測システムおよび評価パラメータ
被験者に対し,拘束性が少なく負担が小さい対象動作計測法について検討す る.2 章で述べたように被験者の上半身の回転運動に注目すると,この運動は臀 部を中心とした回転運動である.リハビリテーションを行っている患者の運動 においては,この回転運動は健常者と比較すると速度が遅くなる.従って,Fig.2 に示すように,x 軸周りの回転角を Pitch 角,y 軸周りの回転角を Yaw 角,z 軸周りの回転角を Roll 角としたとき,Fig.1 の(a)~(e)の一連の座標系の回転運 動を,Pitch 角,Yaw 角,Roll 角の回転角速度ωx(t),ωy(t),ωz(t) として計 測する.
)
x(t
ω
)
z(t ω
)
x
(t ω
Fig.2 Definition of local coordinate system
回転運動にともなう回転角速度を計測するためのセンサとしては,ポテンシ ョメータや傾斜計で計測した角度を微分する方法や,ジャイロセンサで計測す る方法がある.ポテンショメータは角度を直接計測するが,1 個のセンサにつ
き2 ヶ所の設置点が必要となり,被験者の拘束性が強い.傾斜計は1 点設置で
済むが計測角度の精度に問題がある.本論文では,デバイスが小型かつ比較的 安価であるジャイロセンサを使用し回転運動にともなう,回転角速度を計測す る.Fig.3 に計測方法の基本要素となる 3 次元ジャイロセンサおよび各ジャイ ロセンサにおける角速度を計測するための座標系を示す.Fig.3 の座標系を Fig.2の座標系に合わせることで,Gyro A はz 軸周り,GyroB はy 軸周り,
そしてGyro C はx 軸周りの角速度を計測する.ジャイロセンサは(株)村田 製作所のレートジャイロでジャイロスターENC-003J を使用する.サイズは,
15.5mm×8mm×4.3mm,重さ2.7g と小型で軽量である.
3つのジャイロセンサをそれぞれが直交するように配置し,50mm×30mm× 20mm のケースに収める.このとき,Fig.2 中の矢印方向に回転した際ジャイ
ロセンサの出力が正の出力をするようにする.ジャイロセンサを長時間使用す るとドリフトが生じる可能性がある.起き上がり動作開始時までの静止状態で 計測される直流成分を計測時間全体のデータから差し引くことでドリフトの影 響を避けることができる.計測の際,3 次元ジャイロセンサ部を被験者の胸骨上 にスポーツベルトを用いて固定する.このようにすることで,被験者ごとに容 易に設置調整を行える.
Fig.3 The definition of local coordinate and gyros
以上のような設置条件のもと対象動作中の角速度の計測を行う.Fig.4 に,健 常者にジャイロセンサを設置し,対象動作を行ってもらった際の角速度波形を 示す.ベッド上に仰臥位の状態では Fig.4 の区間(a)のように角速度の出力はな い.区間(b) で Yaw 角と,Pitch 角の回転が開始し,続いて Roll 角の回転が始 まり,区間(e)でベッドに端座位の状態になり,角速度の出力が停止する.Roll 角 と Pitch 角は正方向,Yaw 角は負の方向への出力が大きく,それぞれ反対側へ の回転による出力は小さい.
(a) : Dorsal position (b) : Get up of the bust (c) : Rotation
Rol l
(deg ./sec .)
Yaw (deg ./sec .)
Time (second)
Pitc h
(deg ./sec .)
0 1 2 3 4 5 6 7 8 9 10
-50 0 50 100 -100 -50 0 50 -50 0 50 100
150 (a) (b) (c) (d) (e)
(d) : Lower at the bed (e) : Sitting position
Fig.4 Angular velocity (normal)
この角速度の波形から,FIM を推定するにあたり使用する評価用パラメータ について検討する.脳血管疾患の後遺症による運動機能低下の原因の1つに一 部の筋肉の制御機能の低下が挙げられる.筋肉の制御機能の低下により上半身 の姿勢変化制御,姿勢維持制御が自分の意識どおりにいかなくなる.結果とし て,回転運動の目標とする回転角で静止することができずオーバーシュートし てしまう.そのオーバーシュート量を補正すべく逆向き回転であるアンダーシ ュートが発生する.この動作は,角速度では正方向と負の方向の出力がそれぞ れ互い違いに出力される.また,筋肉の制御機能が高くなると,オーバーシュ ート,アンダーシュート共に少なくなる.従って,Fig.5 に示すように,黒で示 す角速度の正の回転角とグレーで示す逆向きの回転角度に注目することで筋力
の低下が評価でき,FIM 値の運動項目合計得点に相関をもつと考えられる.
Pitc h
(deg ./sec .)
Fig.5 Parameter for evaluation
従って,(1) 式を評価用パラメータ rc (c ∈x, y, z) とする.
) , , (
c
c c x y z
dt dt
rc − ∈
=
∫ ∫
正の値 ω
負の値
ω (1)
正の回転角と負の回転角の比を取った理由は,筋肉の制御機能の質の違いを基 準化するためである.筋肉の制御機能が低下し,動作を持続できない患者の場 合,勢いをつけないと回転することができない.すなわち高速回転できるが,
整定できずオーバーシュートする.高速回転できかつ高速整定できる人はそれ なりの高い筋肉の制御機能を持っていることになる.持続的に動作を行うこと ができる高い筋肉の制御機能を持っているか,筋肉の制御機能そのものが低下 している患者の場合,回転速度は小さくなる.比を取ることにより,この筋肉 の制御機能の質の違いを基準化できる.
パラメータとして角速度の最大値も考えられるが,高周波雑音の影響により誤 差の要因となる.それに対し,面積はローパスフィルタ効果があり高周波雑音 の影響を受けにくい.(1) 式の∫ωc負の値dtにマイナスを付けたのは,正の値に するためである.
rcの値が小さいことは,順方向の回転に対して戻りが小さいことを意味し,起
き上がりが安定していないことを意味する.このような理由から,健常者は,
あまり揺れずに対象動作を行うので rcは小さい値となる.
2.4.2 FIM 値推定法
(1)式を評価用パラメータとし,FIM 値の推定方法を提案する.FIM 値は評 価者による 7 段階主観評価である.一方ジャイロセンサによる計測値は物理量 である.これらの関係を直接結びつける理論数学モデルは存在しない.従って,
計測結果から,FIM 値との相関係数を求め,相関が高いパラメータを説明変数
(原因),FIM 値を目的変数(結果)として重回帰式を求めることにより統計 的なモデルを構築する.
2.5 臨床実験
2.5.1 被験者および実験方法
Fig.3 のシステムを用いての臨床実験を,脳血管疾患の後遺症として実際に麻 痺を持っている患者に対し,インフォームドコンセントを得たうえで協力して もらい実施した.被験者はリハビリテーション中の患者 20 名(62.7± 9 歳)
を対象とした.
被験者の胸骨上にジャイロセンサをスポーツベルトで取り付け,ベッドに仰 臥位の姿勢をとってもらう.合図後,仰臥位から起き上がり端座位を取っても らう.今回の実験では,介護者のサポートは一切なく,被験者自身で対象動作 を行ってもらう.ジャイロで計測した角速度は,サンプリング間隔 0.05s で A/D 変換し,パソコンに取り込み評価用パラメータを算出する.また,患者ごとに 違う看護師(平均勤務年 10.2 ± 2.3 年)が FIM 値を評価する.
同一被験者で複数回計測する場合,約 1 ヶ月の間をおいて計測し,全 31 回計 測を行った.
2.5.2 結果および考察
FIM 値の運動項目得点が 29 点の患者の角速度の計測波形を Fig.6 に示す.
患者においても動作区分は健常者と同じ手順で行っており,Fig.1 の(a)~(e) と 同様に区分した.Fig.4 と Fig.6 を比べると,健常者の波形は,正の部分の面
積が多いため rc が小さい.患者の波形では正負ともに角速度が発生しており,
rc が大きくなってしまっている.また,患者では(b)~(c) の各区間での動作時間 は,健常者と比較して長く波形も乱れている.このことから患者は,すぐには 起き上がれず,体を揺らしながらゆっくりと起き上がっていることが分かる.
Rol l
(deg ./sec .)
Yaw (deg ./sec .)
Pitc h
(deg ./sec .)
Fig.6 Angular velocity (FIM 29 patient)
31 回の計測データから無作為に 27 データを取り出し,(1)式の評価用パラ メータ rx,ry,rzと FIM 値との相関を求めた.残りの 4 データはモデルの検証 に使用する.rx,ry,rzそれぞれの散布図を Fig.7(a),(b),(c) にそれぞれ示す.
FIM 値の運動項目合計と rx の間には-0.68(5%水準で有意),ry との間には 0.11(5%水準で有意),rzとの間には-0.77(5%水準で有意) という相関が認めら


![Table 1 に睡眠の深さとデルタ波の出現率,脈波,体動の定性的な関係を示す[2],](https://thumb-ap.123doks.com/thumbv2/123deta/8681375.1832500/80.892.133.756.159.916/Table1に睡眠の深さとデルタ波の出現率脈波体動の定性的な関係示す.webp)