自動運転自動車の
パスプランニング
菅沼直樹 米陀佳祐
(金沢大学新学術創成研究機構)3
自動運転の判断
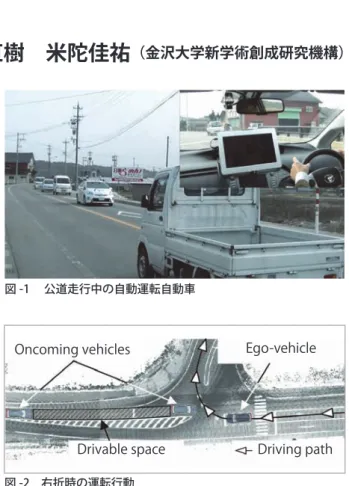
近年自動運転自動車に関する研究開発が世界各国 において行われている 1).日本においても,図 -1 に示すように筆者らの研究室が国内の自動車メーカ 等の協力のもと国内の大学としては初となる公道走 行実験を開始するなど大きな盛り上がりを見せて いる2). このような自動運転自動車を安全に目的地に到達 させるためには,通常ドライバーが運転時に行ってい る認知・判断・操作といった一連の動作をオンボー ドセンサおよびコンピュータを用いて代替させる必要 がある.これらの運転知能では,従来自動車の分野 で古くから培われてきた機械的要素技術とそれを動 かす制御技術に加えて,新たに高度な情報処理技術 が必要となる.本稿ではこれらのうち,筆者らのこれ までの経験を踏まえ,特に「判断」部において重要 となるパスプランニング技術を中心に解説する.パスプランニングに必要な情報
パスプランニングとは,自動車等の移動体が「将 来どのように動くべきか?」という将来の挙動を計 画することを意味しており,古くから移動ロボット の分野において多くの検討がなされてきている.こ のパスプランニングという言葉の日本語訳としては 「経路」計画と「軌道」計画の 2 種類の言葉が存在 している.「経路」とは移動ロボットが通過すべき 位置や姿勢の順序集合を示す.また「軌道」では, その順序集合を,時間をパラメータとして表現した ものである.自動車の自動運転では,自車および周 辺に走行する車両が高速に行き交う環境であるため, パスプランナでは「軌道」を計画する必要がある. たとえば,図 -2のシーンのように多数の対向車 両が存在する環境で自動運転車両が右折を行う状況 を考える.この場合,安全に交差点を通過するため には,まず対向車両群を検出する.そして,自車が 侵入すべき対向車両間のスペースを探索し,タイミ ングを見計らってそのスペースの間を通り抜けるよ うな運転行動を計画する必要がある.この場合,単 に「経路」を追従するのみでは右折は可能であるが, タイミングを見計らうことができない.このため, 自動運転自動車では「軌道」の設計が重要となる. 本章では,この軌道計画に必要な情報について整 理する. 図 -1 公道走行中の自動運転自動車 Oncoming vehiclesDrivable space Driving path Ego-vehicle
図 -2 右折時の運転行動
基 専応般
*
移動物体の軌道予測と物体識別
自動車を交通環境において自律的に走行させるた めには,走行する環境がどのような状態であるかを LIDAR (Light Detection and Ranging) ,ミリ波レ ーダ,カメラ等のオンボードセンサにより把握する 必要がある. 通常,オンボードセンサから得られるセンサ情報 は,センシングした時点での周辺環境を計測したも のである.一方,交通環境は高速に移動する移動物 体が多数存在するため,安全かつスムーズな自動運 転を行うためには,現在の状況を計測したのみでは 実は不十分であり,その環境が将来どのように変化 するのかを予測することも必要である.このため, 移動物体に関してはオンボードセンサで計測した センサ情報を Kalman Filter や Interacting Multiple Model 法3)といった手法を用い,時系列的にコン ピュータ上で追跡し,移動物体の予測軌道を求める 必要がある. また通常ドライバーが運転を行う際,障害物に対 する回避操作の仕方は,物体によって異なっている. たとえば図 -3に示すように,電柱やポール等の単 なる障害物と,歩行者が道路脇に存在していた状況 では,同じ場所に静止していたとしてもその回避行 動の仕方(避け幅)は異なると考えられる.このた め,個々の物体種別の識別も必須の機能となる.
*
デジタル地図と自己位置推定
高速道路のみでの走行を前提とした自動運転シス テムとは異なり,一般道での走行も想定した自動運 転システムでは,デジタル地図を多用して自動運転 を行う場合が多い4).デジタル地図を活用すること で,たとえば先読み運転が可能になるなど,大きな 利点がある. ただしデジタル地図を活用した自動運転を行うた めには,正確な自己位置 ・ 姿勢の推定が必要とな る.従来カーナビ等の分野では GPS(Global Posi-tioning System)に代表される GNSS(Global Navi-gation Satellite System)が多用されてきた.GNSS は「地球上のどこにいるのか?」という絶対位置を 計測可能なセンサである.しかし絶対位置に基づい て自動運転を行ってしまうと,たとえば地震等によ り地殻変動が生じた場合にあらかじめ作成した地図 と絶対位置との間に差が生じてしまい,自然な自動 運転を行うことが難しくなる問題がある.このため, 絶対位置ではなく地図に対する相対的な位置を推定 する手法が必須となることに注意が必要である1),4).デジタル地図を活用した
パスプランニング
従来自動車の自動運転では,高速道路上の本線の みの走行を仮定したものがほとんどであった.高速 道路上の本線を走行するのみの自動運転では,基本 的には白線を認識して車線の中央を走行し,ドライ バーが設定した速度で走行を行う.また,先行車両 が存在すれば車間距離を維持するという運転行動で 大まかには自動運転を行うことが可能であった. 一方,一般道での走行まで仮定すると,たとえば 道路脇の駐車車両等の障害物が存在している可能性 があり,車線の中央を走るのみでは問題が生じる. また高速道路とは異なり,そもそも走行する環境が 複雑であり,交差点での右左折,信号機に応じた交 差点侵入判断,歩行者の考慮などさまざまな交通環 境に応じた適切な運転行動をとる必要がある.本章 では,複雑な走行環境に適応して走行するために必 要なパスプランナの一例として筆者らの開発してい る自動運転システムについて解説する.*
パスプランナの概要
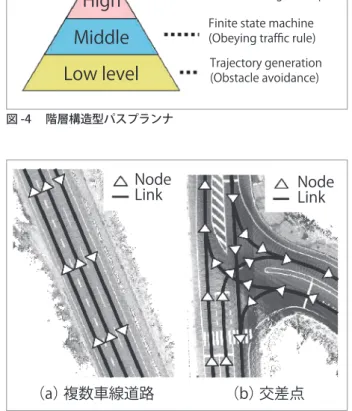
交通環境では多数の自動車,歩行者,さまざまな 種類の障害物等が存在している.また,交差点や横 Obstacle Pedestrian (a)障害物の回避 (b)歩行者の回避 Ego-vehicle Ego-vehicle 図 -3 物体による回避行動の差断歩道などさまざまな交通環境が存在するため,複 雑な運転行動をとる必要がある.このため,複雑な 運転行動をソフトウェアの見通しを良く設計するた め,図 -4に示すように三層の階層構造型構造を有 するパスプランナを設計している.このプランナで は上位では時間的にほとんど変化のない情報を考慮 し,下位では一瞬の状況変化を考慮してパスプラン ニングを行うように設計されている.これらのプラ ンナを有機的に結び付けて自動運転を行うことで, 複雑な状況判断を可能としている.下記に各階層に おける機能と役割について述べる.
*
High Level プランナ
High Level プランナでは,ユーザからの目的地, 目標速度情報を受信して,目的地までの最適なルー トを探索する. パスプランニングに用いるデジタル地図の情報と しては,図 -5に示すようにノード,リンクで表さ れるベクトル地図(有向グラフ)を用いる.ノード は道路の中心座標を表す緯度経度や道幅といった情 報を含んでいる.またリンクはノード間のつながり とその方向を示し,直進・右左折といったリンクの 種別や,破線や黄色線などの白線種別情報が付加情 報として記載されている. これらの情報を用いて目的地まで到達可能なルー ト探索を行う.本研究ではルート探索に Dijkstra 法 を用いている.Dijkstra 法を用いることで,任意の 地点から目的地まで最低コストで到達可能なルート を探索可能となり,任意のタイミングで自動運転を 開始することが可能となる.なお,コストの計算に は制限速度から計算されるリンク通過時間を基礎と し,直進 ・ 右左折といったリンク種別ごとにペナル ティを与えることで右左折の少ないルートを選択さ れやすくしている.*
Middle Level プランナ
通常,人間が自動車を運転しているとき,「周辺 環境のどこを注視するのか?」,また「どのような 運転行動をとるのか?」はその道路環境により大き く異なる.このため,単純に High Level プランナ が計画したルートを辿るだけでは自然な運転を行う ことができない.このため,Middle Level プランナ では,交通シチュエーションに応じて適切な注視位 置,運転行動を考慮する役割を有している. たとえば右折の状況では,図 -6に示すように注 視領域として対向車線を設定する.そして,対向車 両の有無,対向車線の見通しの良さを考慮し,対向 車線と交わる領域へ侵入すべきか否かの運転行動を 決定する.そのほかにも,「止まれ」標識のある一 旦停止交差点では,停止線での確実な停止を判断し てから交差点に進入する等,各々の交通環境に応じHigh
Middle
Low level
Route selection based on digital map Finite state machine (Obeying traffic rule) Trajectory generation (Obstacle avoidance) 図 -4 階層構造型パスプランナNode
Link NodeLink
(a)複数車線道路 (b)交差点
図 -5 デジタル地図の例
Monitoring area
Driving path Ego-vehicle
た適切な注視領域設定,運転行動を有限状態機械 (Finite State Machine)により記述することで交通 ルールに基づいて適切に運転を行うことが可能と なる.
*
Low Level プランナ
上述の通り,Middle Level プランナでは交通ルー ルに基づいて注視領域設定およびそれに基づく運転 行動決定を行う.しかし,さまざまな交通環境にお いて単純に典型的な運転行動決定を行うのみでは複 雑な状況に対応して走行することは困難である.こ のため Low Level プランナでは,Middle Level プラ ンナが設定した運転行動を基礎とし,すべての障害 物との衝突を考慮した上での最終的な走行軌道(車 両の時系列的な将来の挙動)を計画する. Middle Level プランナからは車線中心線の位置, 道幅,目標速度といった情報が送信される.これら の情報を用いつつ,Low Level プランナは最終的に 自動運転自動車がとるべき走行軌道を計画する.し たがって安全かつ搭乗者の乗り心地が良い軌道を設 計する必要がある.通常,走行経路上に障害物が存 在する状況においてドライバーがとり得る運転行動 は,大まかにはハンドルによって障害物を回避する か,障害物手前で停止するかの 2 種類に分けること ができる.そこで Low Level プランナでは,上位モ ジュールから得られる経路情報(走行車線の中心位 置や道幅等)から,時刻tにおける車線中心位置か らの時系列的なオフセット量d(t)と,デジタル地 図上の走行距離s(t)のパターンを複数生成する.そ して図 -7に示す幾何学的関係から,次式を用いて オフセットパターンd(t),および走行距離パターン s(t)を組み合わせた多数の軌道候補x(t)を生成する. x(t)=r(s(t))+d(t)nr(s(t)) (1) ここで,r(s)はデジタル地図から与えられる走行 経路上の道のりsにおける経路位置を示す.また, nr(s)は道のりsにおける経路r(s)の単位直交ベク トルを示す.なお,オフセットパターンd(t)およ び走行距離パターンs(t)は 5 次多項式として与え る5).そして,生成した軌道候補の中から,障害物 に衝突する軌道を除外し,残った軌道の中から評価 関数が最も小さくなる軌道を選択することで,安全 性と乗り心地を考慮した軌道を生成することが可能 となる. なお,生成した軌道が安全であるか否かの判定に ついては,静止障害物であれば単純に生成した軌道 上の位置姿勢と自車の車両形状を考慮して衝突の有 無を判定すればよい.しかし,移動物体については 生成した軌道の各時刻における車両位置姿勢と,移 動物体の各時刻における予測位置姿勢を,各々の形 状を考慮して重ね合わせを行い,衝突の有無を判定 する必要があることに注意が必要である.石川県珠洲市における
公道走行実証実験の概要
本章では,筆者らの研究室が国内の大学としては 初の試みとして実施している石川県珠洲(すず)市 における自動運転自動車による公道走行実験の取り 組み2)について紹介する. 珠洲市は,石川県の能登半島の先端に位置し,高 齢化の進んだ自治体である.珠洲市の公共交通機関 としては,バスもしくはタクシーのみとなっており,Reference path Ego-vehicle Preview points
Trajectory Reference path (Digital map) (a) 多数の軌道候補生成 (b) 生成する軌道の幾何学的関係 d(t) x(t) s(t) y r(s) n r(s) x 図 -7 走行軌道と経路の幾何学的関係
地域によってはバスが 1 日に 1 便しかない状況と なっている.このため,自動運転自動車の活用によ る公共交通空白地域の解消が切望されている.この ような背景から,2015 年 2 月から市街地を含む一 般道での公道走行実験を開始した.実験に用いてい る車両は,図 -8に示すトヨタ自動車製のプリウス である. 実験開始後約半年間は珠洲市内のごく限られた範 囲約 6.6km において走行実験を行っており,この区 間には交通量の比較的多い市街地や,道幅の狭い山 間部といった多種多様の道路が存在している.実験 開始約 2 カ月後の 2015 年 4 月中旬にはこの区間の 往復約 13.2km の完全自動での走行を実現している. また現在では,関係機関と調整の上,ほぼ珠洲市内 の全域となる約 60km の区間での自動運転による走 行も実施している.現時点では,国内で市街地を含 むこれほど広大な領域での走行実験を行っている例 は皆無であり,この走行実験を通して日本の自動運 転技術の向上に貢献を図っていく予定である.
自動運転の鍵を握る情報処理技術
本稿では,自動運転自動車の認知 ・ 判断 ・ 操作技 術のうち,判断部におけるパスプランニング(走行 軌道生成)技術について解説した. 自動車産業は国内の最も大きな産業分野のうちの 1 つであり,自動運転は将来の自動車産業の命運を 握る分野の 1 つと言える.また,自動運転では情 報処理技術がその根幹をなす技術分野の 1 つと考 えられる.今後の自動車産業の発展のためにも,情 報処理技術のさらなる進化が期待される. 参考文献1) Ziegler, J., et al. : Video Based Localization for BERTHA, Proc. of the IEEE Intelligent Vehicle Symposium, pp.1231-1238 (2014). 2)菅沼直樹,林悠太郎,永田大記,高橋謙太:高齢過疎地域に
おける自動運転自動車の市街地公道実証実験概要,自動車技 術会学術講演会 講演予稿集,No.14-15S, pp.390-394 (2015). 3) Shalom, Y. B. and Blair, W. D. : Multitarget - Multisensor
Tracking : Application and Advances Volume III, Artech House Publishers, pp.161-198.
4) 菅沼直樹,米陀佳祐:自動車の自動運転におけるデジタル地 図の活用,日本ロボット学会誌,Vol.33, No.10, pp.760-765 (2015).
5)Werling, M., Ziegler, J., Kammel, S. and Thrun, S. : Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame, Proc. of the IEEE International Conference on Robotics and Automation, pp.987-993 (2010).
(2016 年 3 月 4 日受付) GNSS LIDAR GNSS Camera RADAR RADAR 図 -8 自動運転自動車の概要 菅沼直樹 [email protected] 1975 年生.2002 年金沢大学大学院博士課程修了.博士(工学). 2002 年日本学術振興会特別研究員 PD を経て,同年金沢大学工学部 助手に着任.2015 年より同大新学術創成研究機構に移籍し,現在同 機構自動運転ユニット ユニットリーダ,准教授を務める. 米陀佳祐 [email protected] 1985 年生.2012 年北海道大学大学院情報科学研究科博士後期課 程修了.博士 (情報科学).2012 年より豊田工業大学スマートビーク ル研究センター ポストドクトラル研究員.2015 年より金沢大学新学 術創成研究機構 自動運転ユニット 助教に着任,現在に至る.