JAJA453
SLAA491B 翻訳版 最新の英語版資料 この資料は、Texas Ins truments I ncorporated(TI)が英文で記述 した資料を、皆様のご理解の一助として
頂くために日本テキサス・イ ンスツルメンツ(日 本TI)が英文から 和文へ翻訳して作成 したものです。資 料によっては正規英語版資料の更新に対応していないものがあります。日本TI による和文資料は、あくま でもTI 正規英語版をご理解頂くための補助的参考資料 としてご使用下さい。製品のご検討およびご採用に あたりましては必ず正規英語版の最新資料をご確認下さい。
静電容量式タッチパッド・センサー・ライブラリ入門
MSP430 概 要このドキュメントは、静電容量式タッチパッド・センサー・ライブラリ(Capacitive Touch Software Library)を初めて使用する際
の手順についてについて説明します。MSP430™を使用した静電容量方式タッチ・センシングの方法は数種類存在します。この
ドキュメントでは、開発を始めるにあたり利用可能なメソッド、と対象プラットフォーム、およびプロジェクト例の概要を説明
します。また、MSP430G2452 を搭載したLaunchPad™ バリュー・ライン開発キット(MSP-EXP430G2)及びMSP430容量性
タッチBoosterPackで使用できるライブラリ構成の段階的な説明が付いたプロジェクト例も紹介します。
Code Composer Studio™ 4.2.1 および IAR Embedded Workbench™ 5.20用の付随ソフトウェアおよびプロジェクト例のファ イルは、TIホームページよりダウンロードできます。 目 次 1 静電容量式タッチ・センシングのメソッド概要... 2 2 プロジェクト例... 3 3 参考文献 ... 16 付録 A 電流の計測値 ... 17 図 目 次 図 1 ライブラリのアーキテクチャ ... 2 図 2 容量性タッチ BoosterPack: ポート /ピン(エレメント)割り当て... 4 図 3 ファイルとディレクトリの構造 ... 9
図 4 Code Composer Studioの New Project ウィザード – 対象MCUデバイス選択のステップ ... 10
図 5 Code Composer Studioの Project Properties ウィンドウ – 事前定義されたシンボル/プリプロセッサのシンボル... 11
図 6 Code Composer Studioの Project Properties ウィンドウ – GCC 拡張機能オプションのイネーブル... 12
図 7 Code Composer Studio のプロジェクトのエクスプローラ表示 (C/C++ タブ) ... 12
図 8 Code Composer Studioの Project Properties ウィンドウ – Include オプション... 13
図 9 IARのプロジェクトのオプション – 対象デバイス... 14 図 10 IAR プロジェクトのオプション – プリプロセッサのオプション ... 14 図 11 IARのプロジェクトのオプション – FET デバッガ ... 15 図 12 IAR プロジェクトのエクスプローラ表示 ... 15 表 目 次 表 1 (ライブラリでサポートされている) 静電容量式タッチ計測のメソッドの概要 ... 3 表 2 プロジェクト例の説明... 10 表 3 プロジェクト例の電流計測値 ... 17
参考資料
1 静電容量式タッチ・センシングのメソッド概要
MSP430ファミリのデバイスを使用して静電容量式タッチ・センシングを実行する手法(メソッド)は数種類存在します。各種デ バイス・ファミリとペリフェラル・セットの組み合わせで、センサーからの容量性タッチ応答を計測することができます。 図1に、静電容量式タッチパッド・センサー・ライブラリのアーキテクチャを示します。最上位レイヤーはユーザ定義のアプリ ケーション・コードを含むアプリケーション レイヤーです。 その下位レイヤーは、静電容量式タッチ パッド・センサー・ライブラ リに属します。最下位レイヤーはペリフェラル用のローレベルな関数を含む ハードウェア・ペリフェラルレイヤーです。 ハード ウェア抽象化レイヤー(HAL)には、各種ペリフェラルに応じたセンシングを実装するための関数があり、上位の静電容量式タッ チレイヤーには、ボタン、ホイール、スライダ等のセンサー構造を実装するためのハイレベルな抽象化関数があります。抽象化 のレベルが、左から右へ向かって高くなることに注意してください。例えば、「Raw」ではカウント値そのものを出力するだ けですが、「Wheel」ではタッチ位置を出力します。 図 1 ライブラリのアーキテクチャ表1は、利用可能なメソッドです。左側の「メソッド名」の列は、静電容量式タッチパッド・センサー・ライブラリに実装された HALに おける 記述名を示します。各 メソッドの詳細と実 装については、 Capacitive Touch Library Programmer's Guide (SLAA490) [参考文献1] に記載されています。 表 1 (ライブラリでサポートされている) 静電容量式タッチ計測のメソッドの概要 メソッ ド名 ( H A L の 記 述 ) セン シング・タイ プ ペ リ フェ ラ ル 計 測 タ イ マ ゲート ・ タ イ マ 利 点 M SP 430 デバ イ スの 例 RO_COMPAp_TA0_WDTp 弛張型オシ レータ(RO) コンパレータ COMPA+ タイマ A0 ウォッチドッグ・ タイマ WDT+ 計測中に低消費電力モード をイネーブルにする MSP430F20x1 MSP430F4xx RO_PINOSC_TA0_WDTp 弛張型オシ レータ (RO) ピン・オシレータ タイマ A0 ウォッチドッグ・ タイマ WDT+ 計測中に低消費電力モード をイネーブルにする MSP430G2xx2 RO_PINOSC_TA0 弛張型オシ レータ (RO) ピン・オシレータ タイマ A0 ソフトウェ ア・カ ウンタ ウォッチドッグ・タイマのリ ソースを使用しない MSP430G2xx2 RO_COMPB_TA0_WDTA 弛張型オシ レータ (RO) コンパレータ COMPB タイマ A0 ウォッチドッグ・ タイマ WDTA 計測中に低消費電力モード をイネーブルにする CC430Fxx RO_COMPB_TA1_WDTA 弛張型オシ レータ (RO) コンパレータ COMPB タイマ A1 ウォッチドッグ・ タイマ WDTA 計測中に低消費電力モード をイネーブルにする MSP430F55xx RC_PAIR_TA0 RC 時定数 (RC) デジタル I/O およ び抵抗 タイマ A0 N/A 実装が簡素化される 全 MSP430 デ バイス fRO_PINOSC_TA0_SW 高速弛張型オ シレータ (fRO) ピン・オシレータ ソフトウェ ア・ カウンタ タイマ A0 スキャン速度が大きくなる MSP430G2xx2
ROとRCの原理についての説明は、PCB-Based Capacitive Touch Sensing With MSP430 (SLAA363) [参考文献2] に記載され
ています。また、RCベースの単一のタッチ・センサーの詳細な設計ガイドとしては、MSP430 Capacitive Single-Touch Sensor
Design Guide (SLAA379) [参考文献3] があります。
2 プロジェクト例
2.1 プロジェクト例概要
プロジェクト例 は、MSP430G2452 MCUを搭載したLaunchPad バリュー・ライン開発キットとその上に接続した容量性タッ チBoosterPackを使用します。LaunchPadは低価格の開発キットであり、20ピンPDIPソケット、オンボードのプログラマと デバッガ、PCとのUSB通信機能等を備えています。[参考文献4] MSP430G2452 MCUは、8KBのフラッシュと256BのRAMに加え、セクション1で述べたピン・オシレータを使用したタッチ・ センスを行う16個の入力/出力 (I/O) ピンを備えています。[参考文献5]2.2 MSP430容量性タッチ BoosterPack ハードウェア概要
MSP430容量性タッチBoosterPackはピン・オシレータをベースにしており、近接検知、ボタン、ホイール(ボタンの集合体)と いう3種類のセンサーから成ります。 図2は各センサーのレイアウトと、MSP430G2452 MCUに対するポート/ピンの定義で す。 図 2 容量性タッチ Bo o st e r P ac k : ポー ト/ ピ ン (エ レメン ト)割り当て また、タッチ状態を表すためのLEDエレメントが9個(左右4個ずつと中央の1個)あります。回路図とPCBレイアウトの詳細については、Capacitive Touch BoosterPack User’s Guide (SLAU337) [参考文献6]を参照してください。
2.3 ソフトウェア・ライブラリを構成
静電容量式タッチパッド・センサー・ライブラリは、ポート定義、センシング ・メソッド、エレメント数などの要因を設定、構成 する必要があります。これらの要因は、ソース ・コード structure.c とヘッダ・ファイル structure.h 内で構成します。次 に 示 すス テッ プは 、 RO_PINOSC_TA0_WDTp_One_Button の 例を 使用 し て い ます 。こ の場 合で は、 セン シン グ ・ メソ ッド が RO_PINOSC_TA0_WDTpであり、センサー構造がボタン1つ(中央のエレメント)です。 1. エレメン トの定義:エレメントの構造を宣言し、ポート/ピンの定義を割り当てます 例: 中央エレメントが、P2.5 (ポート2/ピン5)に割り当てられます。 ソース・コードのファイル structure.c 内では、次のような記述になります。 ヘッダ・ファイル structure.h 内では、次のような記述になります。注: 変数thresholdは、エレメントのキャラクタライズのステップのためににゼロに設定しておく必要があります。
注: 変数maxResponse は、ホイール/スライダの実装用にのみセットしてください。単体のセンサーセンサーの実装には必要ありま
せん 。詳細については、Capacitive Touch Library Programmer's Guide (SLAA490) [参考文献1]を参照してください。
2. センサー構造の定義: センサーの構造を宣言し、センシング・メソッド、センサー・エレメント数、ゲート・タイマー、計測ウィンドウを定義 します 例: センサーの構造: • 1つのエレメント(中央エレメント)から成ります。 • センシング・メソッド(は、ピン・オシレータを使用した弛張型オシレータです。 • タイマーA0は計測タイマー、ウォッチドッグ・タイマー(WDT)はゲート・タイマーです。 ソース・コード structure .c 内では、次のような記述になります。 ヘッダ・ファイル structure.h 内では、次のような記述になります。 3. エレメン トの調整(キャラクタライズ) • 閾値を初期化 する: ステップ1で述べたように、閾値はエレメントのキャラクタライズ用に初期化しゼロにする必要がありま す。 • ゲート・タイマーの設定: この例ではRO_PINOSC_TA0_WDTp メソッドをウォッチドッグ・タイマー(WDT)をゲート・タイマー として用いています。ゲート時間は、ノイズ耐性、タッチ感度、消費電力など、センサー性能全体に直接影響します。 – 低周波 数のACLK と高 周波数 の SMCLK の どちら かから WDTに ク ロック を供給 するため にゲー ト・ タイマ ー・ ソース (measGateSource)を調整します。 – 補正して、各種WDT時間間隔を選択するために計測ウィンドウ(accumulationCycles)を調整します。 ソース・コード structure .c 内では、次のような記述になります。
• 調整(キャラクタライズ )用関数をセットアップ: ゲート時間が構成されると、main() 関数ではベースライン・トラッキングの 関数を呼び出し、TI_CAPT_Custom() 関数から返されるカウントをモニターする必要があります。この動作は、main.c内で次 のようにコンパイラ指示子を非コメント化するか、宣言することで完成します。 コンパイラ指示子ELEMENT_CHARACTERIZATION_MODEが定義された場合は、次に示すエレメントのキャラクタライズ用コー ドがmain.c内で実装されます。 • キャラクタライズのデルタ(差分)カウント値を取得: エレメントのキャラクタライズ用のデルタ・カウント値を取得するには、 TI_CAPT_Custom()関数に続くNOP命令にブレークポイントを 設定して、変数dCnt を ウォッチ・ウィンドウに追加します。プ ログラムを数回実行し、次の2通りの状態の値を記録します。
– タッチなし状態: 中央のエレメントは指が接触した状態ではなく、センサー近傍に導電性物体は存在しません。この場合に は、バックグラウンド・ノイズが効率的に 調整されます。このシナリオでは、dCnt の最大値をnoTouchCnt として記録しま す。 – タッチ状態: 中央エレメントに1本の指が接触した状態になっているか、何らかの導電性物体がセンサー近傍にあります。こ の場合には、タッチ応答感度が効率的に調整されます。このシナリオでは、 dCntの最小値をTouchCntとして記録します。 4. 閾値を設定する: 閾値は通常範囲の中心に設定します。
threshold = (TouchCnt - noTouchCnt)/2
閾値を高く設定したり低く設定したりすることで、ノ イズ耐性を大きくしたり、感度を増大させたりすることが可能 になります 。 注: 閾値を低く設定しすぎると、正しくないトリガが発生する確率が高くなり、トリガがノイズの影響を受けやすくなります。 閾値を高く 設定しす ぎると、センサーが導電性物体の存在を認識しなくなります。 閾値が計算された後に、新しい値を使用 して各エレメントの構造をアップデートする必要があります。例えば、キャラクタライ ズにおいて、noTouchCnt = 100 および TouchCnt = 1000であるとすると、閾値は450にセットする必要があります。 ソース・コード structure .c 内では、次のような記述になります。 注: PCBレイアウト、隣接するエレメントの構造、アプリケーションのノイズ・レベル用の適切なゲート時間を決定するには、ステップ3 とステ ップ4を複数回行う必要がある可能性があります。これが逐次微調整プロセスです。 5. 更にハイレベルの抽象化を実現するAPI: ライブラリでは、ベースライン・トラッキング、レートの変更等の内部動作全てを抽象化する、 いくつかのAPIを提供しています。これらのA PIを使用する と、アプリケーション・レイヤー のコードを簡素化できる利点が得られます。 注: (TI_CAPT_RAW()関数を除いて)すべての計測API関数はベースライン・トラッキングを更新します。センサーが長時間計測され ない場合は、TI_CAPT_Update_Baseline() 関数および/または TI_CAPT_Init_Baseline() 関数を使用する必要があります。 (計測されない期間中は、時間の経過とともに電源電圧、温度、環境条件にドリフトが発生している可能性があります) • サンプル・アプリケーションの動作: アプリケーションで1つのボタン(中央エレメント)のタッチを検出には、TI_CAPT_Button() API関数を用います。関数は論理1または論理ゼロを返して、有効なタッチが存在するか否かを通知します。この情報を使用 してMSP430容量性タッチ BoosterPack の中央のLEDが点灯されます。LEDは中央ボタンのタッチを目に見える形で示すた めのインジケータとして機能します。 連続したポーリングを行う間は、MSP430が低消費電力モードになります(LPM3)。タイマー A0を使用して、LPM3から起動 させてアクティブ・モードにするための遅延タイムアウト機能を実装します。 この遅延はプログラム可能であり、 main.c ファイル内で調整できます。
• サンプル・アプリケーションの設定: main.cファイル内では、コンパイラ指示子ELEMENT_CHARACTERIZATION_MODEをコ メントアウトして、(キャラクタライズ・コードだけではなく) アプリケーション・コードがコンパイルされるようにする必要 があります。
2.4 プロジェクト例
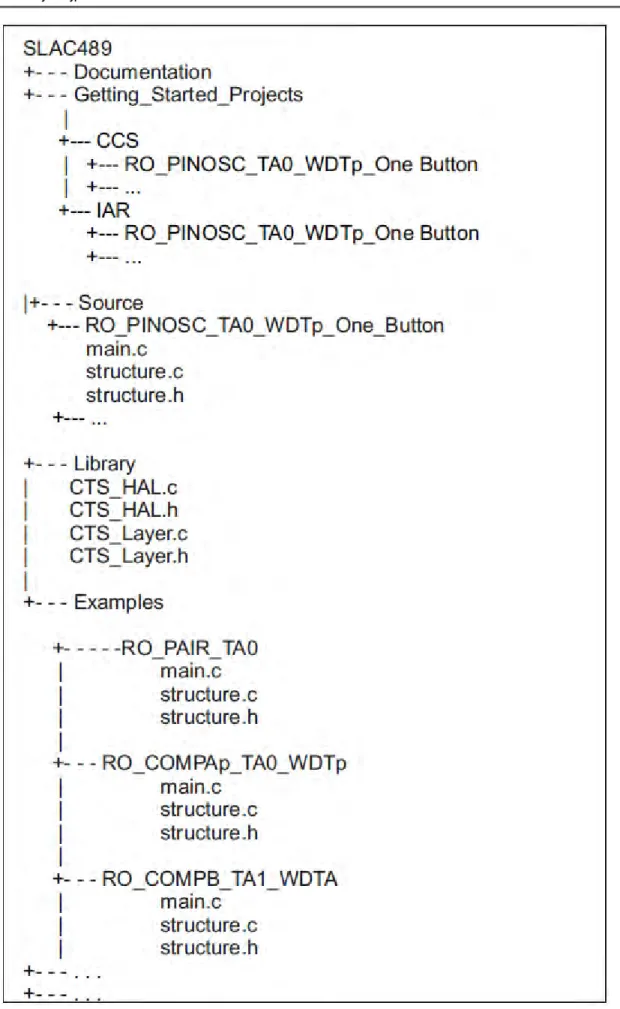
図3にこのアプリケーション・レポートと共にダウンロード可能なプログラムのディレクトリ構造と関連するファイルを示しま す。• CCS: Code Composer Studio IDE用のプロジェクト・フォルダとファイル
• IAR: IAR Embedded Workbench用のプロジェクト・フォルダとファイル
• Library: 静電容量式タッチパッド・センサー・ライブラリのファイル(HALとアプリケーションレイヤー)
• Examples: 各フォルダに入っているコード例は、いろいろな実装がされた、それぞれの MSP430ファミリーのアプリケー
ションを開発するための出発点 として利用できるサンプルです。(サンプル・アプリケーションと構造定義ファイル)
TI_CAPT_Custom()、TI _CAP T_Buttons()等のハイレベルなAPIは、より多くのフラッシュ・メモリ空間を消費しますが、ベースライ ン・トラッキング、アップデート頻度、感度方向等の内部動作を、アプリケーション レイヤーから抽象化します。 その結果アプ リケーション レイヤーがコンパクトになり、またHALや下位のレイヤーの変更に対しアプリケーション・コードが不要になりま す。 TI_CAPT_Raw()等のローレベルAPIを使用すると、フラッシュ・メモリの占有量を小さくすることができますが、ベースライン ・ トラッキング等の機能は別途でアプリケーション・コードに実装する必要があります。このシナリオは、非常にメモリ容量の小 さいデバイスの場合に有効であり、なおかつ消費電力を非常に低いレベルに抑えることができます。
表 2 プロジェクト例の説明 例 の 名 前 API レ ベ ル セン サ ー構 造 説 明 フラ ッ シ ュ (バイ ト) (1) RAM(バイ ト) (1) (2) RO_PINOSC_TA0_WDT p_ One_Button_Compact 低 ボタン(中央エレメント) 中央エレメントのタッチに従い、中央のLED を 点灯させる(消す) 596 18 RO_PINOSC_TA0_WDT p_ One_Button 高 ボタン(中央エレメント) 中央エレメントのタッチに従い、中央のLED を 点灯させる(消す) 1900 14 RO_PINOSC_TA0_WDT p_ Proximity _Sensor 高 近接検知センサー 近接検知センサーの検知結果 に従い、中 央の LED を点灯させる(消す) 1908 14 RO_PINOSC_TA0_WDT p_ Wheel_Buttons 高 ホイール(5 つのボタンの 集合体) 5 つのホイール・ボタンに従い、中央の LED を 点灯させる(消す) 2254 32
(1) Code Composer Studio 4.2.1 IDEを使用して、フラッシュ・メモリとRAMメモリの割り当ての結果を生成しています。
(2) デ フ ォ ル ト のブー ト/rts スタック・サイズ (0x50 ~ 80 バイト)は、RAM容量には含まれません。
2.5 Code Composer Studio IDEでのプロジェクトのセットアップ
Code Composer Studio (CCS) 統合開発環境(IDE)を使用して、プロジェクトのビルド、ダウンロード、デバッグを行うことが できます。
注: プ ロ ジェクト例の 作成には、MSP430 Code Generation Tools v3.3.3を搭載したCode Composer S tudio v4.2.1を使用しました。 1. Code Composer Studioを起動し、File → New CCS Project (新規CCSプロジェクト)と選択し、New Project Wizard のステップに従
ってプロジ ェクトを作成します 。新規プロ ジェク トのセットア ップの詳細については、Code Composer Studio v4.2 User's Guide for MSP430 User's Guide (SLAU157) [参考文献7]を参照してください。
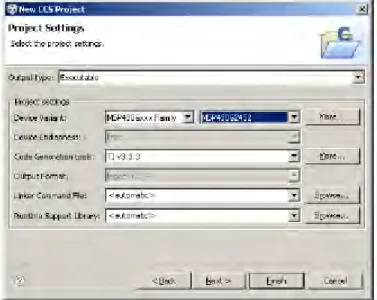
2. 適切な対象MCUデバイスを選択します。MSP430容量性タッチ BoosterPackを使用する 場合は、MSP430G2452 MCUを選択しま す。(図4)
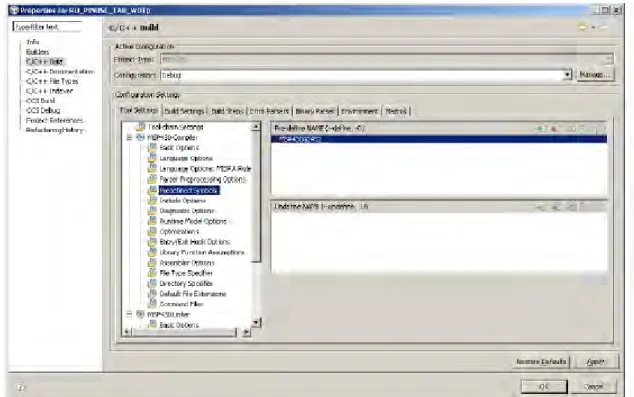
3. プロジェクトのビルドのオプション にあるプリプロセッサのシン ボル/定義されたシン ボルが、対象MCUデバイスと一致していることを確 認します。(図5)
4. プロジェクトのビルドに対し、GCC Extensions (GCC拡張機能) をイネーブルにします。(図6)
• Project → Propertiesと選択して、プロジェクトのプロパティ・ダイアログを表示させます。
• 左側で、C/C++ Buildを選択します。
• 右側の Configuration Settings の 下で、次のようにタブ選択していきます。 Tool Settings → MSP430 Compiler → Language Options → Enable Support for GCC extensions (--gcc)
図 6 Code Composer StudioのProject Properties ウィンドウ – GCC 拡張機能オプションのイネーブル
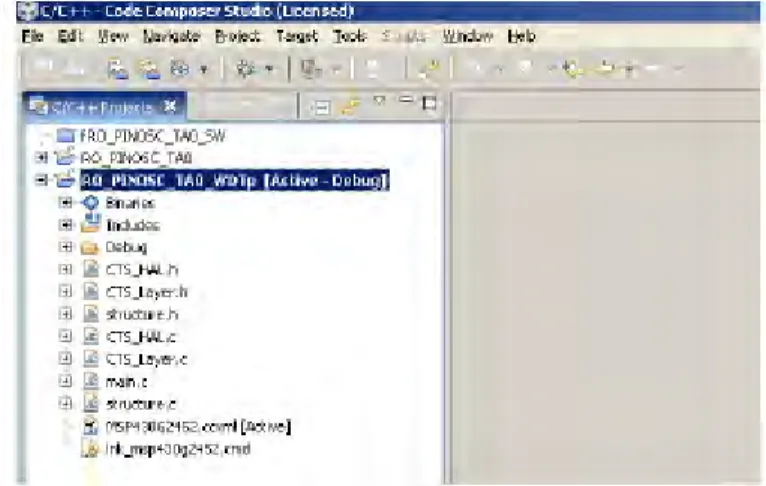
5. 静電容量式タッチパッド・センサー・ライブラリ (HALとレイヤー)およびプロジェクト例のファイル (Main と Structure)を、プロジェクトに
リンクさせます (Project → Link Files to Active Project)。ディレクトリの構造とファイルのパスについては、セクション 2.3を参照してく
ださい。プロジェクトの構成は、図7のように見えるはずです。
図 7 Code Composer Studio のプロジェクトのエクスプローラ表示 (C/C++ タブ)
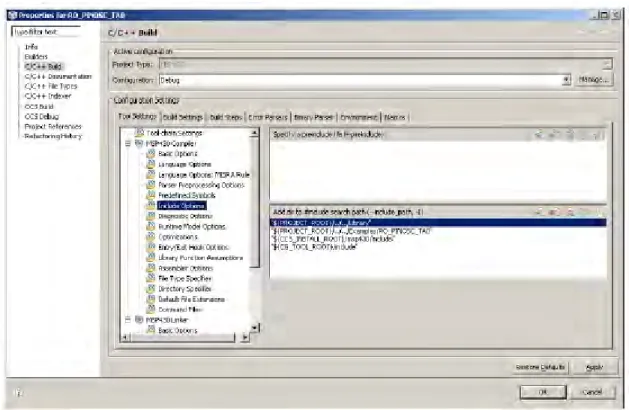
図 8 Code Composer StudioのProject Properties ウィンドウ – Include オプション
2.6 IAR Embedded Workbench IDEでのプロジェクトのセットアップ
IAR Embedded Workbench (IAR) 統合開発環境 (IDE) を使用して、プロジェクトのビルド、ダウンロード、デバッグを行うこ とができます。
注: プロジェクト例の作成には、MSP430 v5.20を搭載したIAR Embedded Workbench 6.0を使用しました。
1. IA Rを起動し、Project → Create New Projectと選択し、「 MSP430」 という語を使用した名前を付けて新規プロジェクトを生成する た
めの一連のステ ップ を実行します 。新規プロジ ェクトのセットア ップの詳細については、IA R Embedded Workbench Version 3+ for
MSP430 User's Guide (SLAU138) [参考文献8]を参照してください。
2. 適切な対象MCUデバイスを選択し、Project → Options、General Options、Target タブと選択していきます。MSP430容量性タッチ BoosterPackを選択したい場合は、MSP430G2452 MCUを選択します。(図9).
図 9 IARのプロジェクトのオプション – 対象デバイス
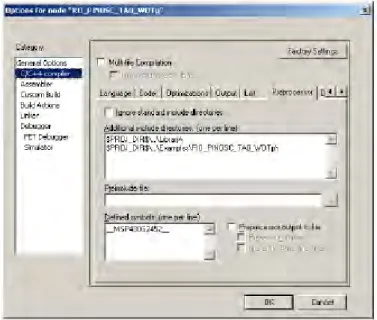
3. Project Options → C/C++ Compilerと選択して表示される 、プリプロセッサのシンボル/定義されたシン ボルが、対象MCUデバイスと
一致していることを確認します(図10)。「追加のインクルード・ディレクトリ」入力ボックスに、ディレクトリのパスを追加します。
図 10 IAR プロジェクトのオプション – プリプロセッサのオプション
図 11 IARのプロジェクトのオプション – FET デバッガ
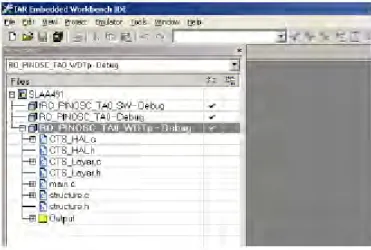
5. 静電容量式タッチパッド・セン サー・ライブラリ (HALとレイヤー)およびプロジェクトのファイル (Main と Structure)を、プロジェクトに追
加します (Project → Add Files)。プロジェクトの構成は、図12のように見えるはずです。
図 12 IAR プロジェクトのエクスプローラ表示
3 参考文献
1. Capacitive Touch Library Programmer's Guide (SLAA490) 2. PCB-Based Capacitive Touch Sensing With MSP430 (SLAA363) 3. MSP430 Capacitive Single-Touch Sensor Design Guide (SLAA379) 4. MSP-EXP430G2 LaunchPad Experimenter Board User’s Guide (SLAU318) 5. MSP430G2x52, MSP430Gx12 Mixed Signal Microcontroller Data Sheet (SLAS722) 6. Capacitive Touch BoosterPack User’s Guide (SLAU337)
7. Code Composer Studio v4.2 User's Guide for MSP430 User's Guide (SLAU157) 8. IAR Embedded Workbench Version 3+ for MSP430 User's Guide (SLAU138)