ENVI チュートリアル
航空写真のオルソ補正
概要 ... 2 使用するファイル ... 2 背景 ... 2 RPC の算出 ... 4 内部標定の作成 ... 5 外部標定の作成 ... 6 RPC 作成 ... 8 航空写真のオルソ補正 ... 10 DEM の選択 ... 10 補足:オルソ補正処理におけるリサンプリング ... 12 この章は以下の内容から構成されています。2
概要
この章では ENVI の航空写真オルソ補正機能に関する操作を学習します。詳細は、 ENVI オンラインヘルプを参照してください。使用するファイル
この章では ENVI の航空写真オルソ補正機能を紹介しますが、必要とされるデー タセットのサイズが大きいため、実際の演習では、データファイルを利用しませ ん。ユーザ自身でスキャンした航空写真のデータを使用し、以下に示す手順に従 えば同様な結果が得られるはずです。以下にコロラド州ボルダーの航空写真を示 します。 図 1:コロラド州ボルダーの航空写真背景
地形の起伏やカメラによって引き起こされる画像上の幾何学的な歪みを、その性 質や規模をモデル化することで取り除く工程をオルソ補正といいます。カメラや衛星の仕様と GCP(Ground Control Points)から、正確で幾何学的に正しく
3
ENVI は Build RPCs Tools を提供しています。Build RPCs Tools はデジタル
航空写真やプッシュブルーム方式で撮影された画像のRPC(rational polynomial coefficient:有理多項式係数)を算出するツールです。ENVI は、デジタル写真測 量の技術で使用されている、センサジオメトリを構築するための共線条件式を使 用し、RPC を計算しています。この技術は、画素、カメラ、イメージ空間、およ び座標系などが関連しています。 単一画像のオルソ補正では、センサジオメトリを構築するため、2 つの前処理を 行います。内部標定と外部標定です。内部標定ではピクセル座標系をカメラ座標 系に変換します。外部標定では画像に関連する位置や角度を決定します。 一度 RPC を算出しますと、RPC 情報はヘッダファイルに追加され、ENVI の
Generic RPC Orthorectification や DEM Extraction のツールで使用するこ
とができます。本演習では、航空写真から RPC を算出し、オルソ補正を行って
いきます。航空写真とプッシュブルーム方式で撮影された画像ではパラメータ設 定 、 手 順 等 が 異 な る 場合 が あ り ま す 。ENVI オンラインヘルプをご参照ください。 より厳密にオルソ補正を行っていただくために、ライセンスをご購入いただくこ とで、ENVI Orthorectification Module のご利用が可能となります。
4
RPC の算出
1. Map -> Build RPCs を選択してください。Select Input File ダイアログ
から航空写真を選択し OK をクリックして下さい。
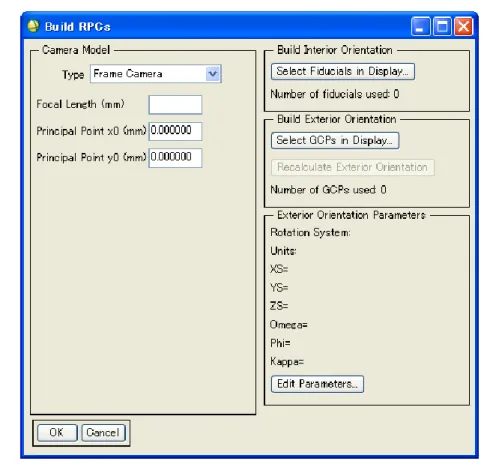
2. Build RPCs ダイアログが表示されます。
図 2:Build RPCs ダイアログ
3. Type ドロップダウンリストから Frame Camera を選択してください。
4. Focal Length(焦点距離)を入力してください。
5. Principal Point x0(mm)と Principal Point y0(mm)を入力してくださ い。通常はカメラキャリ ブレーション情報より入手できます。デフォルト は 0 です。
6. Select Fiducials in Display をクリックして下さい。新しいディスプレ イに航空写真が読み込まれ、Interior Orientation Fiducials ダイアログ が表示されます。
5
図 3:Interior Orientation Fiducials ダイアログ
内部標定の作成
内部標定では、カメラモデルと航空写真の関係を確立します。航空写真とカメラ の基準点(4 つ以上)と焦点距離が必要となります。Interior Orientation Fiducials ダイアログにおけるオプションは Ground Control Poin ts Selection
ダイアログのものと同様です。詳しくは ENVI
オンラインヘルプの"Image-to-Image GroundControl Points"を参照してください。
1. ズームウィンドウ内でクリックし、基準点を選んでください。Interior
Orientation Fiducials ダイアログの Image X と Image Y ボックスに座 標が表示されます。
図 4:Zoom ウィンドウ(左)と Interior Orientation Fiducials ダイアログ(右)
2. 対応する基準点を Fiducial X と Fiducial Y に入力してください。基準点 情報は撮影したカメラの仕様情報から入手できます。
3. Add Point をクリックしてタイポイントを追加します。
4. 上記手順を繰り返し、4 つ以上タイポイントを作成します。
6
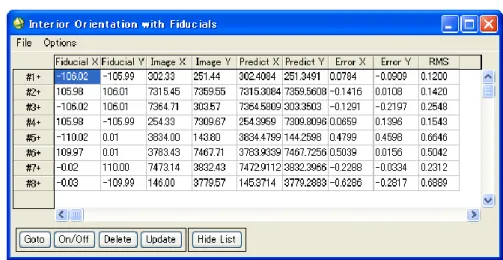
のリストが表示されます。Interior Orientation with Fiducials ダイア
ログで RMS エラーを確認してください。
図 5:Interior Orientation with Fiducials ダイアログ
6. 内部標定を作成するために Interior Orientation Fiducials ダイアログ のメニューバーより Options > Export Fiducials to Build RPCs Widget を選択します。自動的にダイアログが閉じます。
外部標定の作成
1. Build RPCs ダイアログの Select GCPs in Display ボタンをクリックし てください。Select GCPs in Display ダイアログが表示されます。
2. 以下の 2 つのオプションのどちらかを選択し OK ボタンをクリックしてく
ださい。
Restore GCPs from ASCII File :Enter GCP Filename ダイアログが
表示されます。投影情報を含む GCP ファイル(拡張子 .pts)を選択し
OK ボタンをクリックしてください。
Select Projection for GCPs :Select GCPs in Display ダイアログが表 示されます。ENVI オンラインヘルプより"Selecting Map Projection Types"をご確認いただき投影法を選択してください。
3. Exterior Orientation GCPs ダイアログが表示されます。このダイアロ グは Ground Control Points Selection ダイアログと同様に操作できま す。詳細は ENVI オンラインヘルプより"Collecting Ground Control Points"を参照してください。
4. ズームウィンドウ内でクリックし、基準点を選んでください。Exterior
Orientation GCPs ダイアログの Image X と Image Y ボックスに座標が 表示されます。
7
図 6:Exterior Orientation GCPs ダイアログ
5. ピクセル座標に対応する GCP の座標を入力してください。
6. Elve に対応する標高を入力してください。
7. Add Point ボタンをクリックし GCP を追加します。
8. Show List をクリックし Ground Control Points List ダイアログを表示
します。このダイアログは Image to Image GCP List ダイアログと同様
に操作できます。詳細は ENVI オンラインヘルプより"Using the Image to Image GCP List" を参照してください。
9. 4~7 の手順を繰り返し良い結果を算出するために画像にまんべんなく(4
隅周辺にも)GCP を作成してください。ワープ処理の GCP 作成とは違い、
外部標定の場合は正確でなくてはなりません。外部標定が正確でなければ オルソ補正はエラーとなってしまいます。
10. Exterior Orientation GCPs のメニューバーより Options > Export GCPs to Build RPCs Widget を選択してください。Exterior
Orientation from GCPs Error Report が表示されます。それぞれの GCP の RSM エラーとトータルの RSM エラーを確認できます。
8
図 7:Exterior Orientation from GCPs
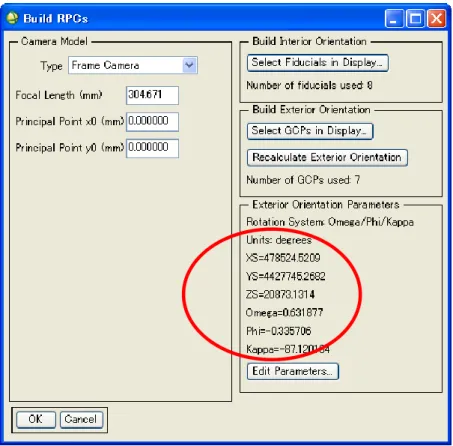
Build RPCs ダイアログに 6 つの外部標定パラメータが表示されます。 (XS, YS, ZS, Omega, Phi, and Kappa)
図 8:Build RPCs ダイアログ 外部標定パラ―メータ
RPC 作成
1. Build RPCs ダイアログの OK ボタンをクリックしてください。Scene
9
2. Minimum Elevation と Maximum Elevation テキストボックスは world_dem ファイル(ENVI インストールディレクトリの data ディレク トリにあります。)より、人口のある領域の標高のレンジ が自動で入力さ れています。ご自身で情報を持っている場合はそれを元に変更することも 可能です。
3. OK ボタンをクリックしてください。処理が完了すると次のメッセージダ
イアログが表示されます。“RPCs have been calculated for this file, and the header has been updated.” OK ボタンをクリックしてくださ い。
10
航空写真のオルソ補正
1. メインメニューより Map > Orthorectification > Generic RPC and RSM >Orthorectify using RPC or RSM を選択してください。Select File to Orthorectify が表示されます。 2. 前項までで使用していた航空写真を選択し OK をクリックしてください。 ENVI はヘッダファイルに含まれる RPC 情報を読み取り、 Orthorectification Parameters ダイアログを表示します。 図 9:Orthorectification Parameters ダイアログ
DEM の選択
航空写真のそれぞれのピクセルの標高を決めるために、Digital Elevation Model(DEM)を使用することができます。ただし、画像の解像度に注意してくだ さい。重要なパラメータを以下にあげます。 DEMのピクセルサイズ 航空写真のピクセルサイズ 出力する画像のピクセルサイズ ENVI では、ピクセルサイズの任意の組み合わせを使用できますが、これらの設 定は結果に対して非常に大きな影響を与えます。DEM のピクセルサイズを、生11 成する出力オルソ補正画像のピクセルサイズ以下にするのが理想的です。 任意の 出力分解能より DEM の分解能が著しく大きい場合は、結果として得られるオル ソ補正画像内に段差(ブロック)のように見える不自然な部分ができてしまうこ とがよくあります。この段差は、同じ DEM 標高(同じ DEM ピクセル)を持つ オルソ補正画像内のピクセルグループ間の境界となる場所にできます。したがっ て、ENVI でオルソ補正処理を開始する前に、[Basic Tools -> Resize Images (Spatial/ Spectral)] を使用して、任意の出力オルソ画像分解能に合わせて DEM をリサンプリングしてください。リサンプリングにはバイリニア 法を使用 することをお奨めします。これは、キュービックコンボリューション法では実際 と異なる特徴要素が生成される可能性が高く、ニアレストネイバー法ではリサン プリングされた DEM が滑らかにならないからです。
1. Orthorectification Parameters ダイアログの Input Height が DEM に なっていることを確認してください。
2. Select DEM File ボタンをクリックしてください。Select Input DEM Band が表示されます。
3. DEM ファイルを選択して OK をクリックしてください。
4. Orthorectification Parameters ダイアログの DEM Resampling ドロ ップリストからアルゴリズムを選択してください。設定されたアルゴリズ
ムによって元の航空写真の座標系から世界測地系(WGS-84)に変換されま
す。
5. Geoid offset を設定してください。Geoid Offset は、画像位置のジオイ ド平均海面高です。多くの標高画像は、各ピクセルの標高平均海面高に関 する情報を提供します。しかし、オルソ補正は各ピクセルの楕円体高に関 す る 情報 を 必要 とし ます 。 DEM 平均海面値から楕円体高に変換する場合、 ジオイドの高さは DEM に追加されなければなりません。例えば、ジオイ ドが海抜より 10m 低い場合は 10 と設定してください。多くの写真測量処 理を行う機関は、ジオイドの高さを決定するための独自のソフトウェアを 持っています。また、NOAA、NGA、USGS や他の機関からもソフトウ ェ ア を 入 手 す る こ と が 可 能 で す 。 現 時 点 で ジ オ イ ド の 高 さ 計 算 に 関 し て は 、 以下のウェブを参照してください。 http://www.ngs.noaa.gov/cgi-bin/GEOID_STUFF/geoid99_prompt1.prl 6. 出力を選択してください。(File か Memory のラジオボタンを選んでく ださい。) 7. Change Proj…ボタンをクリックし投影法を選択してください。 8. 出力のピクセルサイズはデフォルトで入力のピクセルサイズと同じになっ
ています。ピクセルサイズを変更するには X Pixel Size、Y Pixel Size、
Output X Size、Output Y Size に値を設定してください。これらの値を 確認し、入力したパラメータが妥当性を確認してください。
12 9. Options ボタンをクリックし、出力のオプションを選択してください。 10. OK をクリックしてください。オルソ補正が実行され、結果が Available Bands List に追加されます。 ENVI の航空写真オルソ補正処理ルーチンは柔軟に設計されていますので、ユー ザが与えるパラメータに関する制約はほとんどありません。このような柔軟性が あるためツールを容易に使用できる反面、オルソ補正処理に関して不適切な設定 をしてしまう恐れもありますので、注意してください。