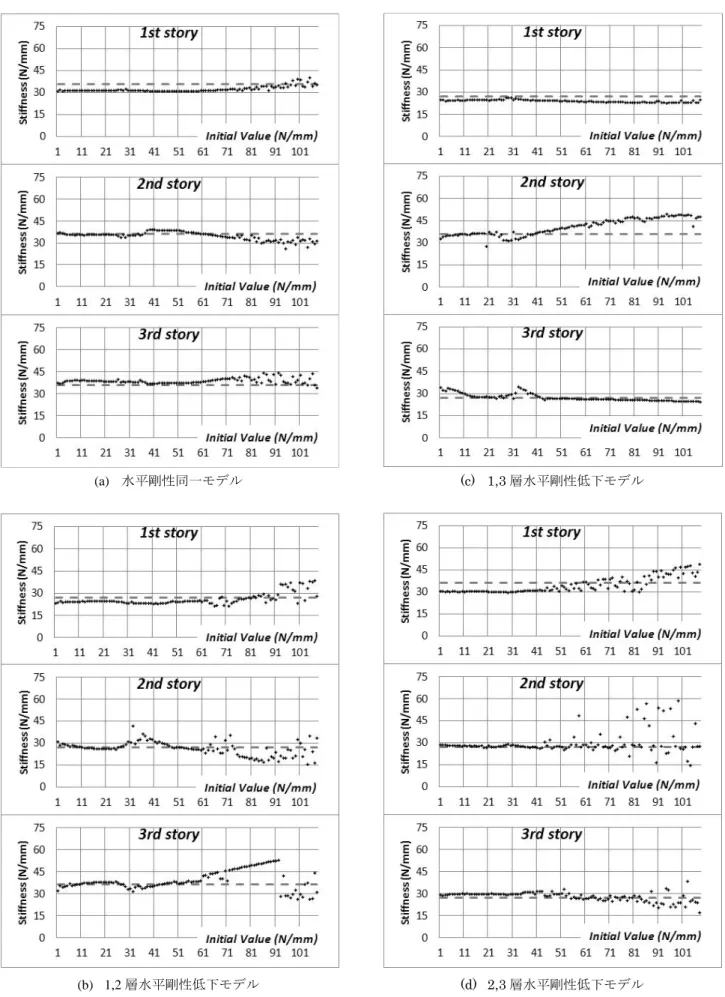
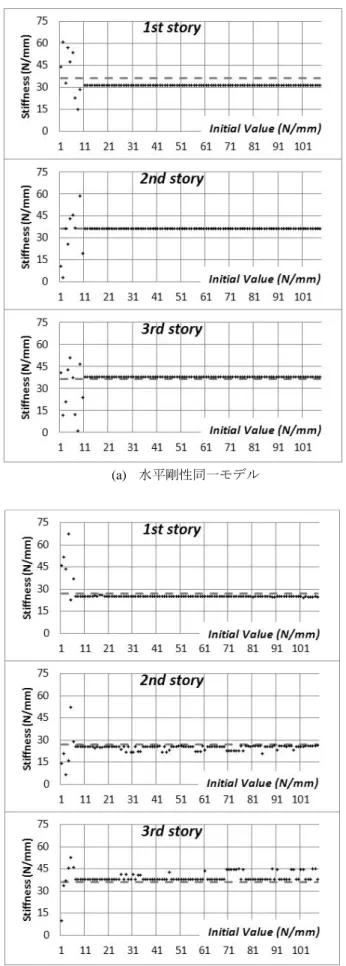
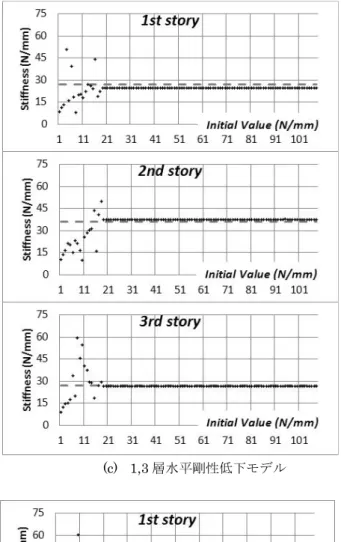
可変的パラメトリック射影フィルタリングアルゴリズムを逆解析手法とする 3層フレームモデルの水平剛性の同定(PDF)
全文
図

関連したドキュメント
aripiprazole水和物粒子が徐々に溶解するのにとも ない、血液中へと放出される。PP
名の下に、アプリオリとアポステリオリの対を分析性と綜合性の対に解消しようとする論理実証主義の
ベクトル計算と解析幾何 移動,移動の加法 移動と実数との乗法 ベクトル空間の概念 平面における基底と座標系
Maurer )は,ゴルダンと私が以前 に証明した不変式論の有限性定理を,普通の不変式論
In addition, it is shown that the ARL profile of Cusum chart obtained using the Markov chain approach and control statistics S and S 2 lies very closely to the ARL profile of the
Their basic components are the representation of candidate solutions to the problem in a “genetic” form, the creation of an initial, usually random population of solutions,
Mori: State difference feedback for stabilizing uncertain steady states of non-linear systems; International Journal of Control, Vol.. Mori: Difference feedbackcan stabilize
介護問題研究は、介護者の負担軽減を目的とし、負担 に影響する要因やストレスを追究するが、普遍的結論を
