- 1 -
中学生ロボコンを視野に入れた エネルギー効率の検討
提出日:2015年2月13日 高山 幸輝
三重大学大学院教育学研究科 教育科学専攻 理数・生活系教育領域
- 2 - 目 次 第1章 緒言
1-1 研究背景・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・4 1-2 省エネ活動の実情・・・・・・・・・・・・・・・・・・・・・・・・・・・5 1-3 今日の小中学校での省エネ教育・・・・・・・・・・・・・・・・・・・・・6 1-4 本論文の構成・・・・・・・・・・・・・・・・・・・・・・・・・・・・・7
第2章 中学校技術・家庭科技術分野におけるエネルギーの取り扱い
2―1 エネルギー変換全般に関する取り扱い・・・・・・・・・・・・・・・・・・8 2―2 効率に関する取り扱い・・・・・・・・・・・・・・・・・・・・・・・・・9 2-3 本章のまとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・10
第3章 自在ギヤボックス・遊星ギヤボックスの比較
3―1 ギヤに関して・・・・・・・・・・・・・・・・・・・・・・・・・・・・11 3―2 目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・13 3―3 方法・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・14 3-4 実験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・17 3-5 考察・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・25 3-6 本章のまとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・26
第4章 高効率化を目指した巻き上げ
4―1 目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・27 4―2 実験方法・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・28 4-3 実験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・30 4-4 考察・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・33 4-5 本章のまとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・33
第5章 ロボットの上り下り
5-1 目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・34 5-2 実験方法・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・35 5-3 実験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・36 5-4 考察・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・39 5-5 本章のまとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・39
- 3 - 第6章 中学校ロボコンへの取入れ
6-1 実践方法と予想される反応・・・・・・・・・・・・・・・・・・・・・・40 6-2 エネルギー効率を考慮した競技例・・・・・・・・・・・・・・・・・・・41 6-3 エネルギー効率を考慮した授業実践例・・・・・・・・・・・・・・・・・42 6-4 本章のまとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・43 第7章 結言・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・44 謝辞
参考文献
付録 実践における指導案例
- 4 -
第1章 緒言
1-1 研究背景
今日の中学校技術・家庭科技術分野(以下中学校技術)においては、「エネルギー変換に 関する技術」が4つの柱のうちの1つになっている。K 社の教科書の対応する部分には、
電気エネルギーを動力、光、熱等に変換する例が挙げられている1)。例えば、ロボット作り においては、モータなどの機器によって、電気エネルギーが運動エネルギーに変換された りする例が挙げられている。また、変換効率に触れる実践例としては、二つの手回し発電 機を直接つなぎ、片方の発電機を回し、他方を負荷のモータとして動かすようにすると、
元の発電機ほどには負荷のモータは回らず、ロスがあることが体験できるなどの例が挙げ られている。しかし、これまでは変換効率については触れられることが少なかったようで ある。また、今日大きな問題となっている地球温暖化問題や、2011年3月の東日本大震災 における原発事故に伴う計画停電の経験から、省エネ技術がクローズアップされることと なった。このことから、中学校技術のエネルギー変換に関する技術においても省エネに関 する技術、変換効率についてもしっかりと取り扱うことが望ましいと考えられる。しかし、
子どもたちが普段から省エネを意識している場面は少なく、どのようにすれば省エネを意 識しながらロボコンを行っていくことができるのかを調査する必要がある。また、エネル ギー効率に関して触れられていることが少ないという現状となっており、ロボットを操縦 する際、どのようにすれば効率よくなるかということを検討する必要がある。
そこで本研究では、ギヤボックスなどを用い、モータのエネルギー効率を、実験をもと に計測し、どのようにモータを用いると効率よく動作をおこなうことができるのかという ことを子どもたちに示すことを目的とする。実験で得られたデータをもとに、どのように すればよりよい効率で動作を行うことができるのか、ギヤの数や段数、ロボットのスピー ドやギヤ比など、どのような工夫を凝らせば効率を改善していくことができるのかという ことも調査する。また、中学生ロボコンを視野に入れ、勝敗を競うだけでなく、省エネを 意識したロボコンに取り組んでいくことができるようにする。様々な実験の結果をもとに、
どのような動作をさせていくことを重視させるかを検討していく。また、ロボットの動作 におけるエネルギー効率の検討を行うことで、ロボットの製作段階から省エネを意識した ロボット作りを行うことができるようにする。
- 5 -
1-2 省エネ活動の実情
今日では、様々な省エネ活動が行われている。T 社のホームページ2)によると、無駄遣 いをなくすことが省エネには大切であると書かれていた。確かに現在では、様々な場面で 無駄遣いがされているように感じる。家庭においては、テレビや電気をつけたままにして しまう、エアコンの温度設定を低くしすぎたり高くしすぎたりしてしまうなど、様々な場 面でかなりの電力を使ってしまうことが挙げられる。
また、ハイブリッドカーを開発するなど、高効率化を図ることで、エネルギー資源の節 約を行っている。このような取り組みを行うことにより、限られたエネルギー資源を節約 し、無駄なく利用できるようにしている。
しかし、ロボットの動作における消費電力の変化や、子どもたちがロボットを作る際に 使用する駆動システム(モータ単体、ギヤ、ギヤ以降の伝達系)の効率に関する情報は少 ないのが現状である。つまり、駆動システム自体のエネルギーのロスに関しては、省エネ を訴えていく中であまり触れられていない。つまり、いくら省エネを行っていくといって も、どのような改良等を行えば消費電力を抑えられるのかといったことが明確になってい ないのが現状である。現在のところは、必要な動作を実現するロボットを工夫し、組み立 てるのが時間的に精いっぱいで、できたロボットの消費電力を確認するだけ、ないしどの ようにすれば消費電力を抑えられるのか手法が分からず、軽量化の工夫をするくらいしか なされていないのではないか。軽量化以外の手法が分からないことから、ロボコンにおい ては、設計段階から省エネを考慮させていくことがなされていないことが現状となってい る。
- 6 -
1-3 今日の小中学校での省エネ教育
今日のロボットコンテストにおいては、消費エネルギーを測定しながら競技を行わせる などの実践を行っている。2012年の「Jr.ロボコン2012 in 三重」では、ロボットの操作に おける消費電力量を測定し、より少ない消費電力量で競技ができたチームに「エコ賞」が 与えられるということがされた。このような取り組みによって、ロボットをどのような動 きをさせればより少ないエネルギーで効率よく操縦することができるのか、を意識させる ことがある。
また、小学校や中学校でも、様々な面で省エネを意識させる活動を行っている。私が大 学院の別の授業において、とある学校における調査を行ったところ、移動教室などでは、
教室などの電気を必ず消すと言ったルールなどを決めることによって、身近なところから 省エネなどを意識させることなどを行っている。普段家庭でも行うことができるような省 エネから行っていくことにより、家でも実践しながら省エネを学んでいくことができるよ うになる。また、電気が普段どの程度使われているのかといったことを示すことによって、
どの程度無駄遣いしているのか、普段の生活において、どのような行動がエネルギーのロ スにつながっているのかなどを考えるような機会を与えている。
しかし、このような教育を行っている学校も一部にとどまり、節電を促す以外の教育を 行っていないところがあるのが現状となっている。私が通っていた中学校では、トイレが すでにセンサーで反応して点灯する電気となっており、自動で消える仕組みとなっていた。
自動で消えることから、消し忘れることはなくなるかもしれないが、子どもたち自身から 電気を消そうという機会が少なくなってしまい、家庭でも電気を消そうとしない場面が出 てしまうのではないかと考える。つまり、節電教育につながりにくくなり、省エネを意識 させていくことが困難になると考える。
このような実践例から、子どもたちに省エネを意識させていくためには、やはり身近な 例を取り上げていくことが重要となってくる。そうすることにより、自分たちの生活がど のようなエネルギーの使用率になっているのかを実感することができる。そこで本研究で は、子どもたちが一度は使うであろうモータに関して、エネルギー効率の検討を行うこと とした。
- 7 -
1-4 本論文の構成
本論文では、第2章で現在の中学校技術・家庭科では、どのようにエネルギー効率が検 討されているのかを調査し、考察する。そして、効率に関してどのように検討されている のかを考察する。
第3章から第5章までは本研究で行った実験の内容を述べる。第3章では、自在ギヤボ ックスと遊星ギヤボックスの2つのギヤボックスにおける巻き上げ実験について考察する。
第4章では、第3章で述べた実験よりも、より高効率になると考えた大型歯車を用いた巻 き上げによる実験について考察する。第5章では、より実際のロボコンに近い形での効率 測定が行えるよう、坂道を上ったり下ったりさせる実験について考察する。
第6章では、本研究で行った内容を基に、どのように学校現場に盛り込んでいくかを検 討する。そして、子どもたちに省エネを意識する授業案を提案し、付録に掲載した。そし て、第7章にて本研究におけるまとめを記載する。
- 8 -
第2章 中学校技術・家庭科技術分野における取り扱い
2―1 エネルギー変換全般に関する取り扱い
平成20年改訂の「中学校学習指導要領解説 技術・家庭編」3)によると、エネルギー変 換に関する技術は、以下の2項目で構成されている。
(1)エネルギー変換機器の仕組みと保守点検
(2)エネルギー変換に関する技術を利用した製作品の設計・製作
ここでは、エネルギー変換に関する基礎的・基本的な知識及び技術を習得させるととも に、エネルギー変換に関する技術が社会や環境に果たす役割と影響について理解を深め、
それらを適切に評価し活用する能力と態度を育成することがねらいとなっている。また、
指導するときは、エネルギー変換に関する技術の進展が社会生活や家庭生活を大きく変化 させてきた状況とともに、新しいエネルギー技術や省エネ技術などのエネルギー変換に関 する技術が自然環境の保全等に大きく貢献していることを理解させていくような記載があ る。また、ものづくりに関しては、実践的・体験的な学習活動を通して、工夫して製作す ることの喜びや緻密さへのこだわりを体験させるとともに、これらに関した職業について の理解を深めることにも配慮することが求められている。
今回の研究と照らし合わせると、エネルギーを無駄なく適切に使用していくことにより、
省エネを意識しながら活動していくとともに、省エネを意識することによって環境問題の 改善など、環境問題にも学習がつながると考える。
- 9 -
2―2 効率に関する取り扱い
1つの例として、図1のような消費電力量リミッターを取り挙げる。消費電力量リミッタ ー4)は、ロボットコンテストの時にモータと接続することによって、ロボットの消費する 電力をリアルタイムに表示し、かつ所定の電力量に達すると出力を停止させる機能を有す るものである。この消費電力量リミッターは、2012年8月16日から19日にかけ四日市市 立少年自然の家を中心に実施された「Jr.ロボコン 2012 in 三重」の成果発表会で用いられ、
消費電力をどの程度抑えることができるのかといったことを計測し、子どもたちにどの程 度電力が消費されるのかといったことに興味や関心を持たせていくことができた。つまり、
この消費電力量リミッターを用い、消費電力量をロボットコンテストの競技のルールに取 り入れることで、生徒らはロボットの設計・製作段階から省エネを意識するように導くこ とが可能となる。また、他の省エネ技術と比較をすると、風力発電や火力発電などのエネ ルギー効率と同様、エネルギー効率をよりよくしていくための工夫を凝らしていくことが 重要であると考えられる。
図1 消費電力量リミッター(上)、表示画面(下)
瞬間の電圧、電流、
電力を表示
消費電力残量を表示
残り時間を表示 電 力 の 変 化を
グラフで表示
- 10 -
2-3 本章のまとめ
本章では、現在中学校の技術・家庭分野において、どのような取り扱いがされているの かを検討した。学習指導要領を検討し、エネルギー変換全般に関する内容と、効率に関す る内容を検討し、どのようなことに留意することが重要なのかを確かめた。
- 11 -
第3章 自在ギヤボックス・遊星ギヤボックスの比較
3-1 ギヤに関して
現在では様々なギヤが用いられている。O 社によると、歯車の種類や効率に関しては、
表1のようになっている。5)また、それぞれの歯車の特徴や構造に関する記述があった。
また、図2にそれぞれの歯車の外観を示す。
表1 ギヤの種類と効率(参考:文献5)
歯車の分類 歯車の種類 効率(%)
平歯車 ラック 内歯車 はすば歯車 はすばラック
やまば歯車 交差軸
すぐばかさ歯車
98.0~99.0 まがりばかさ歯車
ゼロールかさ歯車
円筒ウォームギヤ 30.0~90.0 ねじ歯車 70.0~95.0 注:歯車の伝動効率であり、軸受損失とか潤滑油をかくはんする損失などは除外
食い違い軸
平行軸 98.0~99.5
- 12 -
図2 それぞれの歯車の外形(文献5より引用)
平行軸、交差軸の歯のかみ合いはほとんど転がりで、相対的な滑りは微少であるため、
高効率となる。しかし、食い違い軸は、相対的な滑りによる回転及び動力伝達となるため、
摩擦の影響を受けやすく、効率が悪くなる。
平歯車 ラック 内歯車と外歯車
はすば歯車 はすばラック やまば歯車
すぐばかさ歯車 まがりばかさ歯車 ゼロールかさ歯車
円筒ウォームギヤ ねじ歯車
- 13 -
3-2 目的
表 1 によると、ロボコンで用いられているようなラックやウォームギヤの効率の記載は あるが、中学生ロボコンでよく用いられるようなギヤボックスに関しては効率の記載等が 見られなかった。ロボコンに用いるモータ単体については、ホームページで消費電力や効 率を公開しているメーカーがある。しかしながら、中学生ロボコンに用いられるようなギ ヤボックスと、ロボコンに用いられるモータを実際に組み合わせて効率がどのようになる かの実測例は見当たらない。
そこで本章では、中学生ロボコンでよく用いられる 2 種のギヤボックスを用い、それら のギヤボックスを用いた時の消費電力や効率について検討することとする。それらのギヤ ボックスは、主に平行軸の平歯車が用いられているため、高効率が得られると考えた。ま た、無負荷の時の消費電力や効率とを比較し、どの程度消費電力や効率に差が生じるのか、
どのような動作を行えば、よりその差を少なくすることができるのかといった検討を行う こととした。
また、モータは一般のロボコンでよく用いられている FA-130RA(マブチモータ製)を 用いた。以下にFA-130RA の性能線図を示す6)。この図と比較しながら、効率等の検討を 行う。
図3 FA-130RAの性能線図(3V)6)
- 14 -
3-3 方法
山崎教育システム株式会社(以下Y社)の自在ギヤボックス(図4左)と遊星ギヤボッ クス(図 4 右)の2種類のギヤボックスを用い、おもりを1m巻き上げる実験を行った。
そして、消費電力量リミッターを用いて消費電力量を測定し、効率を計算する方法をとっ た。モータは前述のFA-130RAを用い、消費電力量リミッターに取り付けた単3アルカリ 電池直列2個(3V)で駆動した。
図4 自在ギヤボックス(左)と遊星ギヤボックス(右)
また、自在ギヤボックスと遊星ギヤボックスは、ギヤの数を変えることによって、以下 のようにギヤ比を変えることができる。遊星ギヤボックスについては、図 5 のように、先 端にウォームギヤを取り付けることができ、それぞれギヤ比が異なる。今回の実験では、
このそれぞれのギヤ比ごとにおもりを巻き上げる実験を行い、それぞれで消費エネルギー と効率を測定し、グラフによる評価を行った。消費電力量リミッターで得られる消費電力 量の単位はmWh であることから、効率は、以下の式で計算を行った。実験装置は図 6の ような装置を用意し、自在ギヤボックスと遊星ギヤボックスのそれぞれで行った。
η=
消費電力量
η:効率 m:おもりの重さ(kg) g:重力加速度(m/s2) h:高さ(m)
- 15 -
図5 ウォームギヤを取り付けた遊星ギヤボックスとモータ
① 自在ギヤボックス
ギヤの数 ギヤ比
3個 16.333:1
4個 57.166:1
5個 200.083:1
② 遊星ギヤボックス
ギヤの段数 ギヤ比
(ウォームギヤあり)
ギヤ比
(ウォームギヤなし)
1段 68.1:1 3.4:1
2段 232.2:1 11.56:1
3段 786.08:1 39.2:1
- 16 -
図6 実験装置(自在ギヤボックス(左)遊星ギヤボックス(右))
また、糸を巻き取る部分としては、図7に示すような直径36.15mmのタイヤホイールと、
直径3.05mmのシャフトを用いた。図4の自在ギヤボックスと遊星ギヤボックス、図6の
タイヤホイールとシャフトを用いて、以下のそれぞれの組合せで実験を行った。
図7 タイヤホイールとシャフト
自在ギヤボックス + タイヤホイール 自在ギヤボックス + シャフト 遊星ギヤボックス + タイヤホイール 遊星ギヤボックス + シャフト
- 17 -
3-4 実験結果
まず、負荷なしの場合で、それぞれの条件でモータを1分間回した時の 1秒間当たりの ロスがどれくらい生じるのかを測定した。その結果を以下に示す。
図8 1秒当たりのロス(W)
図 8 を見ると、ギヤボックスを取り付けない場合は、遊星ギヤボックスの方に使われて いたモータのほうが若干ロスが大きくなる傾向が見られた。また、自在ギヤボックスに取 り付けたモータと遊星ギヤボックスに取り付けたモータの 1 秒当たりのロスと自在ギヤボ ックスのそれぞれのギヤ比でのロスは、それほど差がないことがわかる。自在ギヤボック スを取り付けた場合では、何も取り付けずに回した時と同等のロスが生じている。しかし、
遊星ギヤボックスを取り付けた場合は、ウォームギヤなしの場合がモータ単体の 2 倍、ウ ォームギヤありの場合が、およそ 3 倍のロスがあることがわかる。また、ギヤの数が多く なるにつれて、ロスが多くなる傾向がみられる。つまり、ロボットになるべくギヤの数を 少なくし、素早く効率のよい動作をすることが求められる。
- 18 -
次に、自在ギヤボックスとシャフトを用いた実験での結果を以下に示す。
0 10 20 30 40 50 60 70 80 90 100
-9.99E-16 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
消費エネルギー(J)
重さ(kg)
自在ギヤボックスとシャフト
200.083:1 57.166:1 16.333:1
0 0.5 1 1.5 2 2.5
0 0.1 0.2 0.3 0.4 0.5
1秒あたりのロス(W)
重さ(kg)
自在ギヤボックスとシャフト
200.083:1 57.166:1 16.333:1
- 19 -
図9 自在ギヤボックスとシャフトの組合せでの結果
消費エネルギーに関しては、重さが増えていくことによって直線的に増加していくこと がうかがえる。理論上の直線と比べると、今回の実験では、かなり消費エネルギーが大き くなり、理論値と大きく異なる結果となった。おもりが重くなるにつれて、さらに理論値 から離れる値となった。また、1mを巻き上げるための所要時間が長いため、消費エネルギ ーが急激に増加し、ロスが大きくなる。1秒あたりのロスに関しては、ギヤ比が200.083:1 のときに、ほぼ横に一直線になるようなグラフになっていることから、おもりを巻き上げ るときのロスよりもギヤボックスにおけるロスのほうが大きくなり、動作が遅くなってし まう傾向が見られた。
次に、自在ギヤボックスとタイヤホイールを用いた実験での結果を以下に示す。
0 20 40 60 80 100 120 140 160
0 0.1 0.2 0.3 0.4 0.5
所要時間(s)
重さ(kg)
自在ギヤボックスとシャフト
200.083:1 57.166:1 16.333:1
0 10 20 30 40 50 60 70 80 90 100
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
消費エネルギー(J)
重さ(kg)
自在ギヤボックスとタイヤホイール
200.083:1 57.166:1 16.333:1
- 20 -
図10 自在ギヤボックスとタイヤホイールの組合せでの結果
このときは、シャフトを用いた時よりも動作が速くなり、消費エネルギーが4分の1か ら13分の1にまで小さくなることがうかがえる。理論上の直線と比べると、消費エネルギ ーは、シャフトを用いた時に比べて理論値に近い値となった。また、1 秒当たりのロスも、
右図から直線的に増加する。先ほどのシャフトを用いた実験と比べると、消費エネルギー は減少傾向にあるが、1秒あたりのロスは増加傾向にある。所要時間もシャフトを用いた 時よりも短くなっているため、より短時間で物を持ち上げることができ、消費電力を抑え ることができた。
0 0.5 1 1.5 2 2.5
0 0.1 0.2 0.3 0.4 0.5
1秒あたりのロス(W)
重さ(kg)
自在ギヤボックスとタイヤホイール
200.083:1 57.166:1 16.333:1
0 20 40 60 80 100 120 140 160
0 0.1 0.2 0.3 0.4 0.5
所要時間(s)
重さ(kg)
自在ギヤボックスとタイヤホイール
200.083:1 57.166:1 16.333:1
- 21 -
次に、遊星ギヤボックスとシャフトの組合せでの結果を以下に示す。
10 0 20 30 40 50 60 70 80 100 90
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
消費エネルギー(J)
重さ(kg)
遊星ギヤボックスとシャフト
39.2:1 11.56:1 3.4:1
0 0.5 1 1.5 2 2.5
0 0.1 0.2 0.3 0.4 0.5
1秒あたりのロス(W)
重さ(kg)
遊星ギヤボックスとシャフト
39.2:1 11.56:1 3.4:1
- 22 -
図11 遊星ギヤボックスとシャフトの組合せでの結果
消費エネルギーが先ほどよりも大きくなっている。消費エネルギーを見てみると、自在 ギヤボックスを用いた時同様、理論値とは大きく異なる値となった。しかし、自在ギヤボ ックスを用いた時よりも、理論値から大きく離れる結果となった。また、1秒あたりのロ スも、3.4:1 のときを除き、グラフが横一直線の形になっている。遊星ギヤボックスを用 いた時と同様、所要時間が長いため、消費エネルギーが多くなり、ロスが増加する。また、
自在ギヤボックスのときの実験と比べると、かなり巻き上げに要する時間が長くなり、そ の分 1 秒あたりのロスも増加している。また、ギヤ比が 786.08:1 のときは、所要時間が
232.2:1の時の2倍以上となっているため、消費エネルギーも2倍近くにまで増加している。
次に、遊星ギヤボックスとタイヤホイールの組合せでの結果を以下に示す。
0 10 20 30 40 50 60 70
0 0.05 0.1 0.15 0.2 0.25
時間(s)
重さ(kg)
遊星ギヤボックスとシャフト
786.08:1 232.2:1 68.1:1
0 10 20 30 40 50 60 70 80 90 100
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
消費エネルギー(J)
重さ(kg)
遊星ギヤボックスとタイヤホイール
39.2:1 11.56:1
- 23 -
図12 遊星ギヤボックスとタイヤホイールの組合せでの結果
消費エネルギーの大きさはシャフトのときよりも小さくなった。消費エネルギーに関し
ては、11.56:1のときはほぼ理論通りだが、39.2:1のときはおもりが重くなるにつれて理論
値と異なる。1秒あたりのロスに関しては、直線的に増加しているところもあるが、ギヤ比
が39.2:1でおもりの重さが約0.8g以上のときは、時間に比例してロスが増えていくと考
えられる。ちなみにこの場合は、ギヤ比が3.4:1のときは、おもりの重さが10g強で巻き 上げることが不可能となり、測定を行うことができなかった。こちらの実験も、シャフト を用いた時よりも、所要時間が短くなり、1秒あたりのロスを抑えることができる傾向があ る。このときは、
0 0.5 1 1.5 2 2.5
0 0.1 0.2 0.3 0.4 0.5
1秒あたりのロス(W)
重さ(kg)
遊星ギヤボックスとタイヤホイール
39.2:1 11.56:1
0 10 20 30 40 50 60 70
0 0.05 0.1 0.15 0.2 0.25
時間(s)
重さ(kg)
遊星ギヤボックスとタイヤホイール
786.08:1 232.2:1
- 24 -
最後に、実験で得られたデータをもとに効率を計算した結果を以下に示す。
図13 実験で得られた効率
図中の赤い曲線が、メーカーが示している今回用いたモータ単体の標準的な効率である。
今回の実験では、どの場合においても、効率はモータ単体の効率の3分の1以下の大きさ になった。また、効率が最大となるところも、少しずれが生じた。ただし、図13に示した 実験結果は、おもりの重さを元に巻き上げたタイヤホイールないしシャフトの直径とギヤ 比から単純にモータにかかるトルクを計算しており、伝達系のロスに伴うトルクの増加は 考慮していないことに注意する必要がある。今回の実験では自在ギヤボックスとタイヤホ イールを用いた時が一番効率が良くなり、効率は最大で 14%程度となった。モータ単体で の最大効率が約50%程度なのに対し、効率は1/3~1/4となっている。また、モータ単体の ときよりも少し大きめのトルクがかかったときに効率が最大となった。
- 25 -
3-5 考察
効率を検討してみると、この実験では最大で14%程度となった。モータ単体の効率が50%
となっていることと比べてみると、1/3以下の効率となっている。実験時に用いたリミッタ ーとモータをつなぐ線の抵抗がおよそ0.70Ωのため、今回の実験では約0.55Aの電流が流 れるため、約0.212Wのロスとなる。これも、効率が下がる理由なのではないかと考えられ る。表1によると、平歯車の伝達効率は98%程度となっている。しかし、ギヤボックスの ようにギヤを多くかみ合わせてしまうと、仕事の伝達が遅くなったり、ギヤとの摩擦で消 費電力が増加してしまうことから、効率が悪くなりやすいのではないかと考える。そして、
ギヤ比をなるべく小さくし、所要時間をなるべく短くすることによって、消費電力を抑え ることができ、さらなる高効率化を目指すことができるのではないかと考える。また、タ イヤホイール等を用いた時の方が所要時間が短くなり消費電力量を抑えることができる。
このことから、ギヤの数が多いと、ギヤとの摩擦によってロスが生じ、効率が下がってし まうのではないかと考える。また、同じ動作でも短時間で行わせることにより、より高効 率化を目指すことができると考える。遊星ギヤボックスの方が自在ギヤボックスの方より ギヤの段数も多いため、自在ギヤボックスの方が消費電力量が少なくなり、ロスも少なく なっていると考える。
また、遊星ギヤボックスと自在ギヤボックスを比べると、遊星ギヤボックスを用いた時 は、少々効率は低いものの力強い動作ができる、自在ギヤボックスを用いた時は、力強い 動作を行うことができなくなるが、効率の良い動作を行うことができる。すなわち、どの ように動作をさせるのかを考え、適切なギヤボックスを用いていくことによって、より効 率の良い動作を行うことができると考える。
また、今回の実験結果をまとめると、以下のようになる。
(1)負荷なしのときの1秒あたりのロス
①モータ単体:0.4W程度
②モータ+自在:0.36~0.41W程度
③モータ+遊星:0.74~1.19W程度
(2)負荷ありのとき 効率最大は4~14%程度。
(モータ単体の効率はカタログでは最大50%弱)
⇒ギヤを含んだ最大効率は、モータ単体の3分の1以下の大きさ。
効率の測定の結果から、効率が最大となる点がモータ単体よりもよりトルクの値が大き いところとなったので、早く巻き上げた方が効率が上がると考えられる。
また、今回の実験では、一番大きなギヤ比と中間のギヤ人で消費電力量を比べると、一
- 26 -
番大きなギヤ比のときが、中間のギヤ比のときの 2 倍近くにまで大きくなる傾向がある。
このことから、ギヤ比を大きくすることによって、消費電力量が大きく増加してしまう傾 向が見られるため、ギヤ比を大きくすると、力強さは増すが、ロスが大きくなりやすい。
つまり、ある程度の力を持たせ、なるべくロスを減らすためにも、ギヤ比を大きくしすぎ ないことが求められる。
3-6 本章のまとめ
本章では、遊星ギヤボックスと自在ギヤボックスの 2 種類のギヤボックスの比較を行っ た。その結果、自在ギヤボックスの方が消費電力も少なくなり効率も良くなる傾向がある。
しかし、遊星ギヤボックスの方が力強い動作を行うことができ、自在ギヤボックスよりも より重いものを持ち上げることが可能である。
- 27 -
第4章 高効率化を目指した巻き上げ
4-1 目的
第3章のギヤボックスの実験では、効率が最大でも 14%程度とかなり低い値になった。
ギヤボックスでは、ギヤの数も多く、段数も多いため、伝達のロスや、ギヤとの間にかか る摩擦によって消費電力が増加し、効率が下がってしまうと考えられる。そこで、ギヤの 数を減らせば、このようなロスも少なくなり、さらに効率が良くなるのではないかと考え た。そこで、効率の良い方法を探すために、大型歯車を用い、ギヤを 1 段にする実験を行 った。今回の実験では、実際のロボコンに使うことはできるか分からないが、ギヤの数を 減らすことで効率を上げることができるのかということを調査することを目的としている。
また、今回使用した大型歯車は、第 3 章で述べた平行軸の平歯車を使用している。こう することにより、ギヤとの摩擦などによる効率の低下をさらに抑え、さらに効率のよい方 法を探すことを目的としている。レーザーカッターを用いて歯車を手作りしたため、市販 されているものよりも伝達によるロスが生じる可能性があるが、今回の実験では、ギヤの 数を減らすことによって、ギヤの伝達によるロスを減らしたり、なるべく摩擦を減らすこ とによって高効率化を目指すことができるかを目的としている。
またモータは、第3章における実験と比較を行うことができるよう、同じFA-130RAを 用いた。
- 28 -
4-2 実験方法
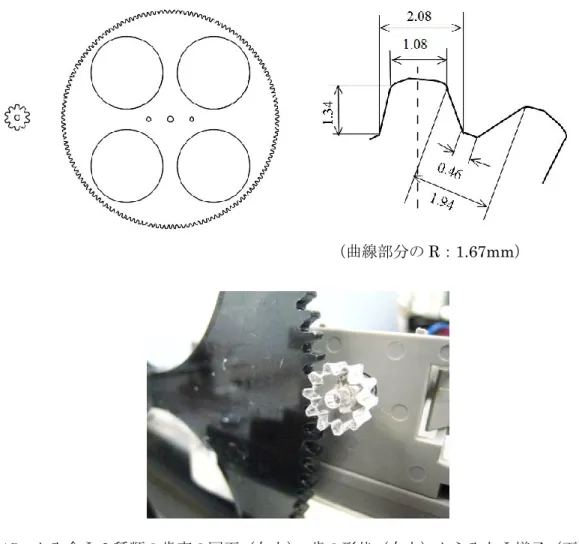
図14のような実験装置を作成し、大型歯車と小さい歯車の2つをかみ合わせて回転させ、
物を持ち上げる実験を行った。図15左のような2種類の歯車を用意した。小さい方の歯車
は直径約10mm、歯数10とし、大きい方の歯車は直径約160mm、歯数150とした。ギヤ
比はおよそ16.333:1となる。図15右のように歯車がかみ合うようにし、これを回すこと によってシャフトが回転し、シャフトに糸を巻きつけることによって物を持ち上げること ができる。また、持ち上げる高さは1mとする。そして、シャフトの先にペットボトルの底 を切り取ったものを取り付け、そこに重りを載せて持ち上げる実験を行った。また、シャ フ ト を 支 え る 部 分 に は ベ ア リ ン グ ( ミ ス ミ 製 、 ベ ア リ ン グ ホ ル ダ セ ッ ト 、 型 番 :
BGHKA624ZZ-15、軸受内径4mm、高さ15mm)を使用し、シャフトとの摩擦によって消
費電力量が増加してしまうことを防いだ。また効率の計算には所要時間のデータも必要な ため、市販のストップウォッチを用いて所要時間を計測した。所要時間をストップウォッ チで計測するために、ある地点から測定し始め、1m巻き上げる時の所要時間を測定した。
実験に用いた土台は、厚さ10㎜のアクリル板をレーザーカッターで加工して作成したも のである。なるべく厚いものを用いることによって、大型歯車を回す際の振動にも耐えら れるようにし、更なるロスの軽減に努めた。
図14 実験装置
ベアリングを使用
- 29 -
(曲線部分のR:1.67mm)
図15 かみ合う2種類の歯車の図面(左上)、歯の形状(右上)からみあう様子(下)
)
- 30 -
4-3 実験結果
大型歯車を用いた時の消費電力量と所要時間に関するグラフを示す。図中の直線の傾き は9.8である。
図16 大型歯車を用いた実験での消費電力量と所要時間
図16を見てみると、何も載せないときが約7.67Jのときを起点として、直線的に増えて いくことが分かる。また、所要時間も直線的に増加していくことも分かる。消費電力量に 関しては、所要時間の測定誤差の関係上、理論直線から少しずれる傾向があるが、ほぼ理 論直線に乗っていることが分かる。しかし、消費電力量のグラフを見ると、重りを重くし
- 31 -
すぎると、理論直線から外れる傾向にある。所要時間にあまり変化はないが、消費電力量 が増加してしまうため、その分ロスが増えてしまう傾向がある。つまり、あまり所要時間 に大きな変化がなかったとしても、重りをのせれば載せるほど、消費電力が急激に増加し やすい傾向があり、あまり無理な動作をさせないことが望まれる。
図17 1秒あたりのロス
図17に得られたデータから求めた1秒当たりのロス(消費電力)を示す。これを見ると、
重さが重くなるにつれて徐々にロスが増えてくることが分かる。この実験でのギヤ比は
16.133:1に設定したので、第 3章の実験での16.333:1 の1秒あたりのロスと比べると、
大きな値となっている。しかし、第3章の実験よりもより重いおもりを持ち上げることが 可能となったため、1秒当たりのロスは大きくなったものの、より力強く物を持ち上げる ことができるようになっている。しかし、図16の消費電力量のグラフから、あまりおもり を重くしすぎてもロスが大きくなる傾向があるため、力強い動作ができても、無駄にエネ ルギーを使ってしまうことになっている。
0 0.5 1 1.5 2 2.5
0 0.1 0.2 0.3 0.4 0.5
1秒あたりのロス(W)
重さ(kg)
1秒あたりのロス(
W)
- 32 -
図18 歯車での巻き上げ実験での効率
図 18に得られたデータから求めた効率を示す。これによると、約 0.25kgのおもりを持 ち上げるときに効率が最大となっている。また、第3章でのギヤボックスを用いた実験で の最大効率が約14%だったのと比べると、今回は約28%程度になっているため、約2倍と なっている。つまり、ギヤの段数を減らすと、伝達のロスが減り、また、シャフトが回る 部分にベアリングを用いることによって摩擦を減らすことで、さらなる改善を得ることが できることが分かった。また、メーカーの示すモータ単体で3Vの電流を比べた時に比べ ると、最大の効率も半分ほどとなっている。
- 33 -
4-4 考察
大型歯車を用いてギヤの段数を減らすことによって、効率の改善を得ることができた。
つまり、ギヤを少なくすることによって、ギヤを伝達するときのロスが減り、また、摩擦 による影響も軽減することができた。また、ベアリングなどを用いて摩擦などを軽減する ことにより、効率を上げていくことも可能であると考える。また、モータに直接かかる負 荷だけではなく、シャフトを回す際の摩擦などによる間接的な負荷も大きな影響を与えて いることが分かる。
また、消費電力と所要時間を見てみると、第 3 章で行った実験よりもより力強い動作を 行うことができるためか、所要時間に大きな変化はなかった。しかし、あまり無理な動作 をさせると、消費電力量が急激に増加する傾向があるため、無理な動作をさせると、ロス が大きくなってしまう傾向がある。しかし、消費電力量にあまり変化が見られないため、
消費電力量リミッター等を用いて測定を行っても、直線的に増加するなどして、規則的に 消費電力量が増加してしまう、つまり、今回の実験の結果からは、消費電力量が急激に増 加したり、所要時間が急激に長くなったりしないため、ロボットに無理な動きをさせても、
ロスが大きくなってしまうことに気づきにくくなり、エネルギーのロスに気づきにくくな るのではないかと考えた。一般のロボコンにおいても、ギヤ比の変更において、力強さが 変化するため、ギヤ比を大きくする際は、より無理な行動をさせないように気を付けさせ なければならないと考える。
しかし、この実験のような装置は、実際に再現させるのは困難であると考える。その点 が課題となる。つまり、実際のロボコンに応用できる形で高効率化を目指すことが必要と なってくる。前にも述べたが、やはり子どもたちは、実践を通した方が、より省エネを理 解していくことができるので、実際にロボコンに応用することができる形で高効率化を目 指す必要がある。このようにギヤの段数を減らして伝達のロスを減らすことができるよう な新しいギヤボックスの開発も考えられる。
4-5 本章のまとめ
第3章で行った実験よりも高効率の方法を探るため、大型歯車を用いた実験を考案した。
ギヤの段数を減らし、伝達によるロスや摩擦によるロスを減らし、高効率化を目指した、
その結果、最大効率が約 28%となり、効率の改善を見ることができた。ギヤの段数を減ら すことは有効であったことがうかがえる。
- 34 -
第5章 ロボットの上り下り
5-1 目的
第4章では、実際の応用を度外視し、大きな歯車を用いた実験を行った。その結果は、
省エネを意識したロボコンに直接応用することが困難なものである。また、子どもたちに 省エネを意識させていくために、実際にロボコンに応用できる形で省エネを意識させてい くことを考えていく。そこで、実際のロボコンで坂道を走る場面を想定して、坂道を上っ たり下ったりする際の消費電力を測定することとした。こうすることにより、実際のロボ コンでどのようにロボットを操作させれば、より高効率につながるのかを検討することが でき、実際のロボコンの操縦へと生かしていくことができると考えた。そして、子どもた ちが実際のロボコンにおいて、実際に坂道を上ったり下ったりさせるときの動作を見なが ら、そして、消費電力量リミッターなどを用いた消費電力の変化などによって、どのよう にすれば、省エネにつながるのかを理解できるようにする。しかし、本章の実験では、第3 章と同じギヤボックスを用いる。その中で、ギヤ比を変えたりすることによって効率等が 変わるのか、どのように高効率化を目指せばよいのかということも考えていくことが必要 となる。
- 35 -
5-2 実験方法
実際のロボコンでよく使用されるであろう坂道を上ったり下ったりする動作において、
モータの消費電力や効率がどのようになっているかを測定した。こうすることにより、こ れまでの実験よりもより実際のロボコンに近い形で測定を行うことができると考えた。第 3章の実験で用いた自在ギヤボックスを用いたロボット(図19)を用意し、長さ180cmの 坂道を様々な高さで走らせる実験を行った。図20のように板を斜めにかけ坂を作り、坂道 を消費電力量リミッターを用いてロボットを走行させ、上る時と下る時に分けて消費電力 量を測定し、上りのときの効率を計算した。また、このロボットに用いているギヤボック スは、3種類のギヤ比があるため、それぞれで実験を行った。効率の計算は以下の式で行っ た。
効率=
消費電力 時間
η:効率 m:ロボットの重さ(0.262kg) g:重力加速度(m/s2) h:高さ(m)
図19 用意したロボット
ただし、h=31cm、40cm、50cm、…、70cm
図20 作成した坂道
180cm
h
- 36 -
5-3 実験結果
消費電力量と上り下りの所要時間に関するグラフを示す。
赤:ギヤ比200.083:1 緑:ギヤ比57.166:1 青:ギヤ比16.333:1
図21 消費電力量と所要時間
消費電力量
(J)W
.
も
ー
ー. •
.
"
•
3
刷 円
hMW徹怨山
‑
•
ー.
' ・
• •
' •
•
•‑.
「 ・
r一
h0.8 0.6
。今4 0.2
日
高さ(m)
‑0.2
‑0.4
‑0.6
‑0.8
所要時間
(s)。 e
。 。
骨
。
s e
︿3E時国凶剛怪
。 。
。 。
0.8 0.6
0.4 0.2
高さ(m)
‑0.2
‑0.4
‑0.6
‑0.8
,
̲
・̲ .
... 守
.日
- 37 -
図中には傾き mg=2.5676 の直線をギヤ比ごとに得られたデータにフィットするように 書き加えた消費電力量は、高さを変えてもロスが変わらないとすると、この直線に乗るは ずである。この直線は、消費電力量の変化の理論値を示す理論直線である。しかし、坂の 傾斜が急になるにつれてあるところから所要時間が急激に長くなり、その分消費電力量も 急激に増加することから、この直線から外れる傾向にあることが分かる。このときは、ロ ボットにより大きな負荷がかかってしまうため、効率が悪くなる。つまり、この実験では、
所要時間が急激に長くなるにつれて、消費電力量も急激に増加する傾向にあり、坂道を上 る際、ロスも急激に増加してしまう傾向がある。
また、200.083:1のときは57.166:1に比べると所要時間が約4倍、消費電力量が約3倍 となった。つまり、同じギヤボックスでも、ギヤ比を大きくすると、力強い動作を行わせ ることができるが、消費電力量の値がかなり大きくなってしまうことが分かった。また、
ギヤ比を小さくすることによって、ロボットの動作も遅くなることから、その分消費電力 量が増加してしまう傾向がある。
次に、単位時間当たりのロスを検討した結果を示す。
赤:ギヤ比200.083:1 緑:ギヤ比57.166:1 青:ギヤ比16.333:1
図22 単位時間当たりのロス
図22中の直線は、データの増減の割合を近似したものである。負荷のかけ具合を変える ことによって、ロスの値が理論上この直線上に乗るということを示すものである。単位時 間当たりの消費電力を見てみると、ギヤ比が小さくなるほど単位時間当たりの消費電力が 増加する。ギヤ比が16.333:1のときは、所要時間が増加することによって理論直線からず れる傾向がある。ギヤ比が57.166:1と200.083:1を比べると、ほぼ同じ値か、57.166:
1 の方が少し大きくなっていることが分かる。しかし、16.333:1の時は、200.083:1 の