キットビルド概念マップを用いた授業内協調学習の分析
Analysis of Collaborative Learning in Class with Kit-Build Concept Map
林 雄介
1野村 敏弘
1鈴木 拓磨
2平嶋 宗
1Yusuke Hayashi
1, Toshihiro Nomura
1, Takuma Suzuki
2and Tsukasa Hirashima
1 1広島大学大学院工学研究科
1
Graduate School of Engineering Hiroshima University
2
墨田区立両国中学校
2
Ryogoku Junior High School
Abstract: This study,with Kit-Build Concept Map method, proposes a method to analyze the three levels
of activities in classroom: individual-activities, small-group work and whole-class discussion. Kit-Build Concept Map is one of concept map building methods that provides concepts and links. This method makes teachers possible to check learners’ understanding in order to facilitate his or her coordination of lessons. This paper presents the result of a case study in a junior high school in Japan.
1. はじめに
授業における教師の役割は,これまでの教授役と いうだけではなくなり,学習を促進するために授業 を運営していくというより広い意味での役割が求め られるようになっている.このような教師の活動は クラスルームオーケストレーション[1]そして,この ような授業運営において,教師が学習者の状況を認 識するための手段としての情報技術も注目されてい る.そこで求められていることは,教師が学習者の 状態を把握し,授業進行において想定している様々 なこととのズレを検知できる環境であり,ある程度 の精密さと正確さが要求される学習者モデルとは異 なり,CSCW で提唱されてきたアウェアネスの概念 のレベルでの情報提供が求められる[2]. 本研究では,キットビルド概念マップ[4][13]とい う概念マップ構築の方式の1つを,協調学習を含ん だ授業におけるクラスルームオーケストレーション の基盤として考え,キットビルド概念マップで取得 できる情報による学習者の理解状態の分析と,教師 に取ってのその分析結果の有効性について検討する. 概念マップの授業における有用性は指摘されてい るが,学習者が作成した概念マップをどのように評 価するかは技術的な問題があり,授業内で形成的評 価を行い,その結果に基づいて適応的に授業するこ とは難しい.本研究は,キットビルド概念マップに よって授業内での評価を実現することを提案すると 共に,実際に行った授業で得られたデータを元に, 現時点で授業内で活用できた事例を紹介する.2. キットビルド概念マップ
本研究では,学習者が自身の理解を表現する手段 として,Novak と Canas の提案[10]に代表されるよう な概念マップという表現形式と,それをキットビル ド概念マップという手法を用いる. 概念マップとは,2 つの概念(ノード)とそれら の関係(リンク)からなる命題を基本構造として, その連結によって意味構造を表すものである.この ような構造を作ることは知識や理解の外化や整理の ための活動として有効であり,学習者の知識や理解 の共有・診断を可能にする上で大きな意義を持つと されている[5].しかし,一般的に概念マップは,ノ ードのリンクのよる結合や場合によっては概念の分 類階層の構築といった形式的制約以外はなしに,学 習者が自由にノードやリンクを設定するために学習 者毎に違ったものとなり,評価や比較が難しく,様々 な評価方法が提案されている[8]. キットビルド概念マップは,概念マップの長所を 活かしつつ,比較や評価といった作成した概念マッ プを利用した活動を容易にするための概念マップ構 築手法である.キットビルド概念マップでは,学習 者がノードとリンクを自由に設定するのではなく, 与えられたノードとリンクを組み合わせることで概 念マップを作成する.この与えられるノードとリン クを用意するのは教師の役目である.教師は,自分 の授業において,学習者が学習内容を理解している ときに構築してもらいたい構造を概念マップとして 記述する.この教師による概念マップをゴールマッ 人工知能学会研究会資料 SIG-ALST-B403-19プとよび,そのノードとリンクの結合を外し,個々 のノードとリンクに分解して,概念マップを作成す るための部品(キット)として提供するのがキット ビルド概念マップの特徴である.似たような形式と しては,Novak の提案する Expert Skeleton Map[10] というものもあるが,これはリンク結合による構造 は残したまま,ノードやリンクのラベルを伏せて, それを記入,選択させる方法であり,構造まで学習 者に考えさせる(キットビルド概念マップ)か否 (Expert Skeleton Map)かによる違いがある.
キットビルド概念マップの特徴は,概念マップ作 成を「分節化」と「構造化」の2 つのプロセスに分 け,分節化までは教師が行い,「構造化」をすべて学 習者に行わせることにある[3].分節化は概念マップ を構成したい内容からノードとリンクになるものを 抽出する作業であり,構造化はそのノードとリンク を結合させて構造を作る作業である.Expert Skeleton Map では,分節化に加えて構造化の一部として結合 まで行われた状態で提供され,全部または一部のノ ードやリンクのラベルを答えることだけが求められ ており,キットビルド概念マップが構造化を全て求 めることとは異なっている.また,キットビルド概 念マップのように部品が提供されていて,学習者が それを再構成するだけでも学習効果があることは, 分節化が必要で,その負荷があまり高くなく,抽出 される分節群の構造が明確な教材では,マップの記 述範囲内で学習者の記憶に与える効果に差異はない ことが示されている[3]. このキットビルド概念マップをタブレット上で作 成できるようにしたシステムがKB マップシステム [12]である.このシステムは,学習者がキットビル ド方式で概念マップを作成するツールである「KB マップエディタ」と,ゴールマップの作成と学習者 が作ったマップの評価のツールである「KB マップ アナライザ」からなる. KB マップエディタはタブレット端末で動作する ため,授業においても一般の教室で実施可能であり, 学習者がタブレットを持ち運んで個人の理解を表す マップをグループで持ち寄って 比較することも可 能である. KB マップアナライザでは,各個人の学習者マッ プを参照できるだけではなく,学習者マップを重ね 合わせて1 つのマップを作ることができる.これを 重畳マップとよぶ.重畳マップでは,キットとして 用意された各リンクが学習者マップの中でどのノー ド間に使われたかが定量的に分かる.これを見るこ とで教師はゴールマップのどの部分が学習者が正し く組み立てれているか,組み立てれていないかを確 認することができるかを一度に見ることができる. 正しく組み立てることができていない部分は,学習 者の理解が間違っているか,教師の説明が不十分ま たはマップと異なっていた点であり,学生へのフィ ードバックに用いることができること[14]に加えて, 教師自身が授業やゴールマップを振り返るきっかけ となる[6].
3. 授業内協調学習の分析
3.1. 授業デザイン
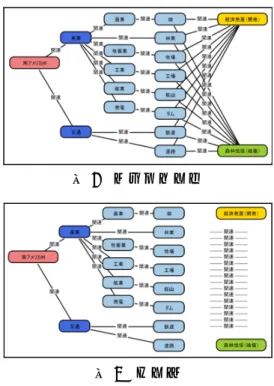
本研究では,協調学習を組み込んだ授業を対象と している.大まかな流れは図1 に示すとおりとなっ ており,個人によるマップ作成,グループでのマッ プ作成,クラス全体でのゴールマップについての教 授の3 つの活動がある.この 3 つの活動で共通して 扱うのは,図2 に示す概念マップをキット化したキ ットビルド概念マップであり,図3 のように一部の リンクだけが外されているものである.ここで学習 の主題となるのは,南アメリカ,特にアマゾンに関 する産業が経済発展および森林伐採とどう関連して いるかを整理することである.また,知識の整理に 他の手段ではなくマップを用いるのは,これまで学 習した左側の産業と経済発展および森林伐採と関連 付けて構造的に理解して欲しいこと,そして,ゴー ルマップに示されているように経済発展と森林伐採 の両方に全ての産業が関連していることを1 つのイ メージとして認識してもらいたいためである. この3 つの活動を通じて,単元の学習内容の整理 として個人で考えた結果(個人マップ)をグループ, クラス全体で比較していくことによって,理解を深 めていく.ゴールマップを設定しているので,マッ プとしては答えは1 つであるが,それぞれのリンク の理由は1 つと限らず,単元で学習した内容からで もいくつかは提示できるようになっている.よって, ここで学習する内容は,マップとしては一意に正解 が設定されるが,その理由付けは多様であるため, 個人としてマップ上でリンクを引けていたとしても, グループ,クラス全体の活動でも新たな認識が生ま れることも考えられ,一種のマルチヴォーカルな学 習環境[11]になっていると考えている. 図1 授業の流れ図2 ゴールマップ 図3 キット
3.2. 授業中の分析
ここでは,授業中に行えた分析とその結果を用い た教師による指導について報告する.授業内で実際 に教師が利用したデータは,グループで作成したマ ップ(グループマップ)を使った重畳マップである. これを図4〜6 に示す.ここで示されているリンクは 2 グループ以上が引かなかったものであり,グルー プとしてその関係性を認めなかったものである.し かし,ゴールマップにおける教師の前提は,すべて の産業のノードが「経済発展(開発)」と「森林伐採 (破壊)」の両方と接続されることであり,教師が生 徒に理解して欲しいと考えている意図と反する点に なる.よって,これらについては,それ以外のリン クよりも丁寧に説明を行った. 図 4〜6 に示しているようにリンクが欠落してい るところはクラスによって異なり,生徒の理解の傾 向が異なっていることが分かる.これについては, 様々な要因が関わっていると思われるので理由を明 確にすることは難しいかと思われるが,教師にとっ ては違いがあるということと,各クラスでどこに指 導を気をつけるかを知れることに意義がある.この ようにキットビルド概念マップによる学習者の作業 とその重畳によって,本稿で取り上げる事例では, クラス毎の理解の違いを瞬時に判断し,それに対し て教師が適応的に指導することができた. もちろん,前述のように,教師が理解して欲しい と思っていることは「関係がある」ということだけ ではなく,それを裏付ける根拠を何らかの資料から 読み取ることであり,単元内で様々な資料と関連付 けながら授業が行われている.生徒が何を根拠にリ ンクを設定したかは,今回のキットビルド概念マッ プ上では測れないが,授業中に用いるという設定で は,教師や他の生徒の話し合いの中で活用されるこ とが期待されると共に,教師がある程度コントロー ルできる部分である. 図4 重畳マップ(A 組). 図5 重畳マップ(B 組). 図6 重畳マップ(C 組).3.3. 授業後の分析
ここでは,授業後に得られたデータから推定でき る授業中の学習について検討する. キットビルド概念マップでは,最初の個人マップ (プレマップ),グループ活動時のマップ(グループ マップ),グループ活動後の個人マップ(ポストマッ プ)の3つが記録されている.この3 つから,各個 人の理解がどのようにグループに集約され,その結 果が個人に還元されたかについて検討する. マップスコアの推移とグループマップとプレ・ポ ストマップ間の一致率から見る全体的な傾向として は,プレマップ,グループマップ,ポストマップと マップスコアが上昇しており,教師が理解して欲しいと思っている関係性についての認識が高まってい ると言える.また,それがグループマップとの一致 率の変化からグループ議論によって導かれていると 推定できる. このような変化がどのようにして起こったのかを より詳細に分析してみる. 各グループのスコアを • グループマップとプレマップのスコアの比較 • プレマップとポストマップの比較 • グループマップとポストマップのスコアの比較 の定性値としてクラスタ分析した. 結果を図6 に示す.ここでは 4 つのクラスタに分 ける.図中の左から以下のように名付ける. (Cluster1) 発展・向上型: プレのmax<グループマップスコア(発展).
プレのmax, min<ポストの max, min(向上)
(Cluster 2) 追従・底上型:
プレのmax=グループマップスコア(追従)
プレのmin<ポストの min(底上)
(Cluster 3) 収集・向上型:
プレのmax>グループマップスコア(集約).
プレのmax, min<ポストの max, min(向上)
(Cluster 4) 収集・底上げ型: プレのmax>グループマップスコア(集約). プレのmin<ポストの min(底上) 図7 マップスコアの変化. 図4 グループ内一致率 図5 グループマップとの一致率 0.55 0.65 0.75 0.85 0.95 Pre グループ Post A組 B組 C組 0.6 0.7 0.8 0.9 1 Pre Post A組 B組 C組 0.6 0.7 0.8 0.9 1 Pre-Group Post-Group A組 B組 C組 図6 グループの分類
これらの4 つの型はここではどれが優れていると いうわけではなく,これらが観測できたということ を示すものである.これらはプレマップとグループ マップの関係で,発展・追従・集約の3 つの要素と, プレマップとポストマップの関係で向上・底上の2 つの要素の組み合わせで分類できた. プレマップとグループマップの関係における「発 展」・「追従」・「収集」の3 つの違いを次に示す.「発 展」はグループ内のプレマップの最高スコアよりも グループマップのスコアが高いことを示し,グルー プでの協調活動において,誰かに追随するのではな く,グループメンバーの理解を組み合わせることに よって,より良いマップを作っている.「追従」は, グループ内のプレマップの最高スコアとグループマ ップのスコアが一致しており,グループ内の最高ス コアのプレマップをグループマップとして採用して いるのと同じ状態である.最後の「収集」では,グ ループマップがグループ内の意見を集めたものにな っているが,プレマップのグループ内での最高スコ アより下回っており,グループ内の意見の選別が必 ずしもうまくいかなかったものである. もう一つの軸のプレマップとポストマップの関係 では,ポストマップの最大値と最小値の両方がプレ マップから上昇している「向上」とポストマップで 最小値のみがプレマップより上昇している「底上」 の2 種類がある.
4. 考察
前節で示した結果を基に、授業中,授業後におけ る教師の支援として,できたこと,今後の検討が必 要なことを整理する.4.1. 授業中の分析
授業中には,全体指導においてグループ活動の結 果を用いて教師が指導を行った.このような形式の 授業においては,生徒が自分たちの意見を全体に向 けてプレゼンテーションする機会を作ることと,教 師が各グループの考えを把握するために生徒自身に 発表をさせるが,今回の授業においては発表をせず に教師が説明を行い,グループ活動の結果を基にク ラス毎の生徒の理解の違いに合わせた指導が行われ た.実際の授業では,時間的な制約もあり,グルー プ毎の発表を行うと,それだけで残りの時間が消費 され,適切な指導や議論ができないことも多い.そ れに対して,今回の授業ではグループマップの重畳 によって全体の理解が可視化されるために,発表が 無くとも教師が全体の理解を大まかに把握すること ができた. ただし,概念マップとして記述されるのは意思決 定の結果であり,その理由はマップ上には表されな い.よって,その具体的な理由を引き出しつつ,意 思決定の誤りを指摘できた方が学習効果が高いと考 えられる.今回はそこまで行う時間が取れなかった が,今後の課題として,授業設計を再検討してグル ープ活動の結果を基に教師が指導するだけではなく, グループ毎のマップの差異を生徒と一緒に見ながら, 生徒に理由を説明させ,それを議論する授業も展開 していきたい. また,今回はグループ活動後にしか作成した概念 マップを利用できなかったが,グループ活動時にも 個人で作ったプレマップの結果を使って教師が指導 できるようにすることも必要である. 単純に各グループ内のプレマップの状態を参照で きるようにすることで教師はグループ毎に理解が欠 けている部分や意見の違いを把握することができる. このような情報を使うことで教師は状況を把握した 上で机間指導できると考えられる. また,3.2 節で示したように,プレ,協調,ポスト というマップの推移を4 種類に分けることができた. これを例えば,プレマップの状態から予測すること ができれば,教師は対策が必要なグループの把握や 対処方法を検討することができる. 把握した後の対処方法の検討はまだ教師が行わな ければならないことが多いが,キットビルド概念マ ップを用いることで,教師は学習者の状態に対する 気付きを得られると言える.クラスルームオーケス トレーションでは,学習者の理解を示す学習者モデ ルを構築するよりも教師が学習者の理解状態を知る ための気付き(awareness)が重要であるとされている. そして,教師がその気付きに基づき,学習者の状態 を判断し,授業を運営していく.そのための気付き を支援するツールがクラスルームオーケストレーシ ョンでまずは求められている技術である.もちろん, 教師が個人のデータを細かく見る時間は授業中には 無いので,ある程度の抽象化をした上で教師に提供 することが必要であり,そのための技術を開発して いくことが必要である.同じようなことがレスポン スアナライザ[9]を用いて,もっと単純に実施できる と考えられるかも知れないが,本研究の前提である, 学習内容を構造的に捉えること,それを総体的に学 び,確認することを考えると,レスポンスアナライ ザでは質問項目が多岐にわたること,構造を直接的 に認識させるにはマップの形式が適していることを 考えると,授業中のタスクから確認までを一貫して マップで行えるキットビルド概念マップの方が適し ていると考えられる.この点については実証されて いるわけでは無いので,今後の検証が必要である.4.2. 授業後の分析
3.2 節に示したように,プレマップとグループマッ プの関係,プレマップとポストマップの関係の2 つ の軸の組み合わせは全部で6 種類であるが,その中 の4 種類が実際に現れた.協調学習の理想的な観点 からは,発展・向上型が協調学習のメリットを示し ているかもしれないが,これだけが協調学習で目指 していることではないとも言える.今回の事例では, 元々,グループ形成の基準が成績が良い生徒と良く はない生徒を組み合わせることであり,そのように 生徒を混ぜることによってグループ内で成績の良い 生徒が良くはない生徒に教えることによって双方が 理解を深めることも期待している.その観点からは, 追従・向上型はその意図を実現したものと言える. ただし,それが単に成績が良い生徒のマップを模倣 しただけなのか,議論の上で採用したのかは分から ない.これについては対話分析などのより詳細な分 析手法が必要である.今後の課題として,キットビ ルド概念マップで分析・推定できる範囲,できない 範囲を明確にしていきたい. また,授業後の分析として,今回はグループのク ラスタリングを行ったが,それだけではなく,個人 の考えの推移とそれに対するグループ活動の影響, クラス全体での考えの推移など,少なくとも個人, グループ,クラス全体といった活動単位と授業の流 れに沿った変容,それらの間の影響といった軸が考 えられる.これらを組み合わせることによって,ま ずは分析をすることで授業内で何が起こっているか を知ることが重要であると考えられる.キットビル ド概念マップでは,現状の機能で少なくとも各活動 単位での終了時の結果を集計することはでき,マッ プの変化や関係性で学習活動を捉えることはできる. 一般に協調学習の分析では対話分析が行われること が多く,それに比べると粒度が大きいが,キットビ ルド概念マップで得られる情報は計算機処理できる 可能性があることも多く,処理を自動化できれば授 業中に可能な分析として用いることができる.この ような授業後の分析と有効な分析の選別,その処理 の自動化というプロセスで,教師がクラスの状況を 把握するための情報技術を拡充していけると考えて いる.5. まとめ
本稿では,キットビルド概念マップを用いた授業 をクラスルームオーケストレーションの観点から, 教師が授業内,授業後に得られる情報について検討 した.ここで示した情報は現時点のものであり,他 の情報もあり得るし,現在は授業後に分析している 情報でも自動処理化することで授業内に得られる情 報に変換することができる. 今後の課題としては,授業から得られる情報を明 確にすること,そして,それを授業中,授業後の適 切なタイミングで利用できることを目指して,KB システムの機能を拡張していきたい.参考文献
[1] Dillenbourg, P. and Jermann, P. (2010) Technology for Classroom Orchestration, New Science of Learning, pp. 525-552, Springer New York.
[2] Dillenbourg, P., Zufferey, G., Alavi, H., Jermann, P., Do-Lenh, S., Bonnard, Q., Cuendet, S., & Kaplan, F., Classroom orchestration: The third circle of usability. Proc. of CSCL2011, vol. 1, pp. 510-517 (2011).
[3] 舟生日出男,石田耕平,福田裕之,山崎和也,平嶋
宗, 概念マップ作成方式の違いによる記憶効果の差
異の比較,日本教育工学会論文誌 35(2), pp.125-134 (2011)
[4] Hirashima, T., Yamasaki, K., Fukuda, H. And Funaoi,H. “Kit-Build Concept Map for Automatic Diagnosis”, Proc. of AIED 2011, pp.466-468 (2011) [5] 川上 綾子,西川 栄展: 概念地図を活用した思考支援 の あ り 方, 鳴門教育大学研究紀要, 28, pp.115-125 (2013) [6] 茅島 路子,宇井 美代子,林 雄介,平嶋宗,概念マ ップを用いた授業内容の伝達状況把握とそれに基づ く大学教員の授業リフレクション,JSiSE research report 29(2), 59-64, (2014)
[7] Kazuya Yamasaki, Hiroyuki Fukuda, Tsukasa Hirashima and Hideo Funaoi. “Kit-Build Concept Map and Its Preliminary Evaluation” Proc. of ICCE2010, pp.290-294 (2010) [8] 森田裕介,中山実,清水康,コンセプトマップを用いた 学習者変容の分析方法に関する一検討, 科学教育研 究, 23(2):98-105, (1999) [9] 永岡 慶三,レスポンス・アナライザを用いた授業進 行支援システムの開発,日本教育工学雑誌,10(3), (1986)
[10] Novak, J.D., & Canas, A.J.: “The Theory Underlying Concept Maps and How to Construct Them”,Technical Report IHMC CmapTools. (2006)
[11] 白水 始,遠山 紗矢香,マルチヴォーカリティが育 む未来への学び,Keio SFC journal 12(2), 19-34, (2012) [12] SUGIHARA, K., OSADA T., NAKATA, S., FUNAOI, H.
and HIRASHIMA, T., Experimental Evaluation of Kit-Build Concept Map for Science Classes in an Elementary School, Proc. of ICCE2012:17-24. (2012) [13] Yamasaki, K., Fukuda, H., Hirashima, T. and Funaoi, H.:
Kit-Build Concept Map and Its Preliminary Evaluation, Proc. of ICCE2010, pp.290-294 (2010)
[14] Yoshida,K., Sugihara,K., Nino,Y., Shida,M., Hirashima,T. “Practical Use of Kit-Build Concept Map System for Formative Assessment of Learners' Comprehension in a Lecture”, Proc. of ICCE2013, pp.892-901 (2013)