招待論文
道路環境認識用長距離イメージングレーザレーダ
ニクラス
クリスチアーノ
†a)曽我
峰樹
†松原
弘幸
†太田
充彦
†小川
勝
†各務
学
†内藤
貴志
†山下
達弥
†Long-Range Imaging LIDAR for Road Environment Recognition
Cristiano NICLASS
†a), Mineki SOGA
†, Hiroyuki MATSUBARA
†, Mitsuhiko OHTA
†,
Masaru OGAWA
†, Manabu KAGAMI
†, Takashi NAITO
†, and Tatsuya YAMASHITA
†あらまし 高機能な先進運転支援システム (ADAS; Advanced Driver Assistance Systems) の実現を目指し た高解像度測距センサとして,長距離測距が可能な CMOS 技術に基づくイメージングレーザレーダを開発した. 毎秒 10 回転の 6 面ポリゴンミラーと一つの半導体レーザで,55◦× 9◦の視野を 202 × 96 画素,10 fps で動作 する.強い太陽背景光 (70 klux) 下で反射率 9%の拡散反射体を対象にした評価実験により,100 m までの距離 画像化を達成した.また,100 m にわたって標準偏差は 14.2 cm 以下,測定値と実際の距離との誤差は 11.3 cm 以下であった. キーワード ADAS,SPAD,イメージングレーザレーダ,高解像度測距センサ,TOF
1.
ま え が き
現在,新車アセスメントプログラム(NCAP; New car assessment programs)の制度化により,事故を未 然に防ぐ予防安全システムが注目されている[1].この 安全システムを達成するために先進運転支援システム(ADAS; Advanced Driver Assistance Systems)の実 現が期待される.ADASとは,ドライバの認知/判断/
操作を繰り返し支援して,ドライバを危険な状況に近 づけないためのシステムである.交通事故撲滅は重要 課題であり,Adaptive Cruise Control (ACC),Lane Keeping Assist (LKA),Lane Departure Warning (LDW),Forward Collision Warning (FCW), Pre-Crash Safety (PCS)などが実用化され,事故低減に 貢献してきた.ADASの更なる高機能化,高性能化に は,“認知”の性能向上が最重要と考えられる.走行 環境の認知の基本タスクは障害物と走行可能領域の検 出であり,これまでの実用化システムでは,センサと してミリ波レーダや単眼/ステレオカメラが主に用い られている.ミリ波レーダは,周辺車両の位置や相対 †(株)豊田中央研究所,長久手市
Toyota Central R&D Labs, Inc., 41–1 Yokomichi, Nagakute-shi, 480–1192 Japan a) E-mail: [email protected] 速度を悪天候下でもロバストに検出できる.カメラに 比べ角度分解能は低いが,200 m程度の長距離の車両 を検出できる.しかしながら,反射強度の弱い歩行者 を背景クラッタと弁別して検出するのは容易でない. CCD/CMOSカメラは比較的距離精度を得にくいも のの,人間の視覚機能に近い高解像度の濃淡情報を取 得でき,これを用いたレーンマーク検出や歩行者検出 が実用化されている.ミリ波レーダとステレオカメラ を用い,両者の長所を融合させたシステム[2]も実用 化されている.
レーザレーダ(LIDAR)はTOF (Time Of Flight)
方式に基づく測距センサで,高い角度分解能や距離分 解能を同時に得やすいため,次世代のADAS用セン サとして期待される.特にイメージング機能を備え たLIDARは性能が急速に向上しつつある[3]∼[11]. LIDARでは,LEDまたはレーザアレーが視野内の目 標物を照射するために用いられる.しかしながら,ア イセーフ等により照射強度が制限され,極めて弱い光 信号を検出する必要があった.そのため屋内で制御さ れた環境下ではなく,屋外のような劣悪な背景光条件 下では性能劣化が生じやすいという課題があった. 我々は市販車への搭載を狙い,小型で低コストな高 解像度LIDARの実現を目指し,屋外でも確実に動 作するイメージングLIDARの研究を進め[12]∼[14],
理,4.ではセンサチップの詳細について説明する.5. では定量的な性能評価と実環境での定性評価により, 提案方式の有効性を示す.最後に6.で結論を述べる.
2.
イメージングレーザレーダの構成と動作
イメージングLIDARの構成を図1 に示す.波長 870 nmのLDから発せられる幅(FWHM; Full Width at Half-Maximum) 4 ns,133 kpulse/sの短パルス光 を,6面ポリゴンミラーを介して照射している.出射 する光ビームの垂直方向と水平方向の広がり角は,そ れぞれ1.5◦と0.05◦である.また,ポリゴンミラーの 各面はそれぞれ異なった傾き角となっており,100 ms の1回転周期において垂直方向の6水準にレーザ光を 反射することで9◦の画角を得ている.水平方向55◦ の走査中に対象物で反射された光は,再びポリゴン ミラーを介して放物面ミラーの焦点に配置したセン サチップ上に結像される.背景光除去のため近赤外 線フィルタをセンサ前面に配置した.センサチップは 0.18µm CMOS技術で作られている. イメージングLIDARにおいて実施している画像 データの取得方法を図 2に示す.センサチップには 図 1 イメージング LIDAR Fig. 1 Imaging LIDAR system.ミラーにより,実質的に202×96画素のTOF画像と, 202× 192画素の受動画像が同時に取得できる.TOF 画像と受動画像の画素照合は非常に容易で,TOF画像 の任意画素に統合される背景光強度の正確な予測やコ ンピュータビジョンアルゴリズムの活用が可能である.
3.
時空間相関に基づくデジタル信号処理
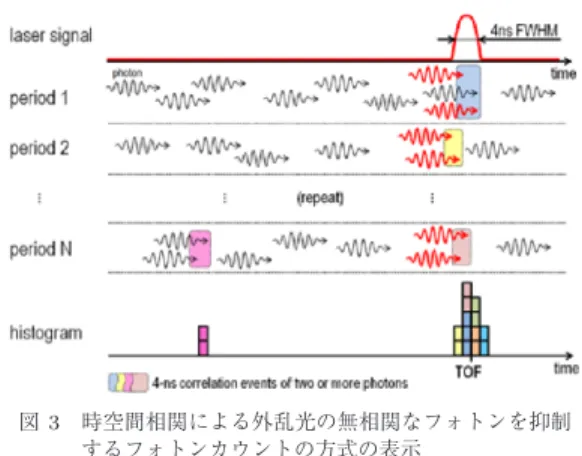
前章で述べたように,不要な背景光はまず近赤外 フィルタによって除去される.しかしながら,中程度 の日照条件下においても太陽光とLDの光強度に圧倒 的な差があるため,背景光の抑制は光学フィルタだけ では不十分である.強い背景光に対処するために,回 路及びDSP (Digital signal processing)レベルにお いても背景光除去を施す必要がある.我々は,2個以 上の信号フォトンによる時空間相関に基づく手法で背 景光除去を実現した[12].時空間相関の基本原理を図3に示す.時空間相関は, 複数のSPAD (Single-Photon Avalanche Diode)で 構成されたマクロピクセルによって実現できる.図3
図 2 画像データ取得方法
Fig. 2 Illustration of the proposed look-ahead passive imaging concept.
図 3 時空間相関による外乱光の無相関なフォトンを抑制 するフォトンカウントの方式の表示
Fig. 3 Illustration of the spatiotemporal-correlated photon counting technique utilized to reject uncorrelated photons from the ambient light.
において,ある画素に入射したフォトンを波束形のシ ンボルによって示している.黒い細線の記号は無相関 のフォトンを示し,赤い太線の記号はLDからの信号 フォトンを示している.無相関に検出されたフォトン は背景光の可能性が高い.レーザパルス幅は4 nsで, 信号フォトンはレーザパルス発光時間内に集中し,高 い相関を有することになる.したがって,4 ns以内に 二つ以上のフォトンが同時に検出された場合に,TOF を検出するためのトリガ信号を発生させる.一方,こ れより長い時間にばらつく無相関のフォトンは無視す ることが可能となる.したがって,この無相関のフォト ンに関するイベントは次段のTDC (Time-to-Digital-Converter)に伝達されない.その結果,TDCデッド タイムの影響も大きく軽減されている. 強い背景光下では入射するフォトンが増えるため, 二つ以上の相関がないフォトンで生じる誤検出が無視 できない頻度で発生し,既に述べた方法のみでは背景 光を除去できない.そこで,この誤検出がレーザパル スのタイミングに対して時間的な相関がないことを利 用して誤検出を除去する.図3に示すように,レー ザパルスの発光に対して検出された時間に相当するヒ ストグラム・ビンに,フォトンの数を加算して保存す る.この処理はN回のレーザパルスで繰り返される. レーザ信号で生じるフォトンは理論的に同じ時間遅れ で生じるため,検出すべきTOFに該当するヒストグ ラム・ビンにピークが形成される.無相関のフォトン はばらばらのトリガ時間を示すので,ヒストグラムが 分散することになる.その結果,ヒストグラムの中か ら最大値となるヒストグラム・ビンを探索することに 図 4 システム・オン・チップ (SoC) の構成 Fig. 4 System-on-a-chip architecture.
より,背景光を除去してTOFを決定できる.
4.
センサチップの設計
4. 1 システム・オン・チップの構成 我々が開発したセンサチップはシステム・オン・チッ プ(SoC)の考えに基づいている.SoCの構成を図4 に示す.センサチップにはTOF画素と参照画素の2 種類の画素が配置されている.それぞれの画素は回路 に埋め込まれた複数のSPADによって構成されてお り,マクロピクセルと呼ぶ.TOF画素のマクロピクセ ルは,6× 4の升目状に配置された24個のSPADで 構成され,参照画素のマクロピクセルは垂直解像度を 2倍にするために12個(6× 2)のSPADで構成されて いる.各TOF画素のマクロピクセルは,4個のTDC と,DSPで利用する2個のSRAMを有している.SoCには,基準となるPLL (phase-locked loop),バ イアス回路及びJTAG (joint test-automation group)
コントローラも搭載している.テスト用にJTAGコン トローラを実装することで,SRAMブロックを含むほ とんどのレジスタへの読み書きを可能としている.通 常動作ではJTAGを用いず,シリアルインターフェー スによりTOF画素と参照画素の2種類の画素の読出 しを同時に行う.参照画素のデータは,1画素あたり 17 bitの強度情報からなり,32画素で544 bitのデー タを出力する.一方,TOF画素のデータは,1画素あ たり76 bitの距離データや信号強度データからなり, 16画素で1216 bitのデータを出力する.画像フレー ムごとに読み取られるデータ量は,これらの値に画素 列の数202とポリゴン面数6を乗じた量となる.結 果として,10 fpsの画像取得で,TOF画素と参照画 素のチップ読み出し速度はそれぞれ約6.6 Mbit/s,約 14.7 Mbit/sである.
n-wellは全てのSPADで同一であり,カソードとして 64× 6で周期的に配置されたSPADに接続している. 各SPADのp+アノードも64× 6で形成され,マ クロピクセルに隣接して配置されたフロントエンド 回路に接続される.トランジスタレベルのフロント エンド回路の概要を図 6に,主要ノードの波形例を 図7に示す.ここでロジック回路の電源電圧は1.8 V 図 5 マクロピクセル内部の断面構造.上図に記載した破 線に沿っての断面を下図に示した.
Fig. 5 Cross-sectional view of an internal region of a macro-pixel. Two adjacent p+/deep n-well SPADs with p-well guard-rings are illustrated.
図 6 SPADとフロントエンド回路
Fig. 6 SPAD and front-end circuit. Passive-quenching and active recharge circuit featur-ing enable/disable capability via a JTAG in-terface. コード電流源を形成している.この電流源からSPAD への供給する電流値は,SPADのラッチング電流より 十分小さくすることで,適切なクエンチング動作[18] が行われる.ここで,VAPD はSPADの室温でのブ レークダウン電圧(VBD)より3.3 Vだけ大きなバイ アスを印加している.この状態では,SPADの増倍領 域にキャリアがなく,M1とM2によって形成された 電流源は遮断されている.この状態でSPADにフォ トンが入射すると,アバランシェ電流がカスコード電 流源に流入するが,カスコード電流源は高インピーダ ンスであるため,アノード電圧VSPADは急激に上昇 する.その結果,SPADに加わっているバイアス電圧 (VAPD− VSPAD)はブレークダウン電圧VBD にまで 減少し,最終的にはアバランシェ電流を停止させる. SPADのキャリアが完全に消滅すれば,VSPADの上の 全ての寄生容量と接合容量が充電され,SPADは初期 のバイアス状態に復帰する. 初段のインバータにより,VSPADの電圧パルスは矩 形デジタルパルス(VINV)に変換される.このパルス の立ち上がり時刻がフォトン到着のタイミングを示し ている.このパルスの持続時間はSPADが次のフォ トンを検知できないデッドタイムとなり,現状では約 20 nsである.フロントエンド回路の出力(VOUT)で
図 7 SPADフロントエンド回路のVSPAD,VINV,VOUT
各ノードにおける理想化した波形.フォトンが検出 された場合の回路動作を示している.
Fig. 7 Idealized waveforms on nodes VSPAD, VINV
and VOUT of the SPAD front-end circuit. These waveforms illustrate the circuit opera-tion when a photon hypothetically is detected.
図 8 並列検出回路
Fig. 8 Schematic of the concurrence detection circuit. は,VINVのパルスを4 nsの正のデジタルパルスに変 換している. 時空間相関の信号処理は,図8に示す並列検出回 路(CD)によってマクロピクセルごとにデジタル処理 されている.CD機能は組合せ回路によって容易に実 装できる.各マクロピクセルに接続されたフロントエ ンド回路はフォトン検出とともに4 nsのデジタルパ ルスを出力する.このとき,2個以上のフロントエン ド出力信号(VOUT)が同時にアクティブになると,ト リガパルスを発生する.この回路は,主として一般的 な加算器をベースとしたものであり,その桁上げ出力 (CO)信号は,2個以上の入力が同時にアクティブに なったときに出力され,トリガ信号となる. トリガ信号は,アクティブとなる入力位置によって 異なる経路を通る.1段目では,全加算器(FA)が3 個の入力中2個以上の同時検出で,CO出力をアサー トする.この信号は遅延素子を通して,最終段のOR ゲートへ出力される.遅延素子は信号経路による伝送 時間のばらつきをなくすために必要である.次に,異 なる全加算器の加算出力Sを調べる必要がある.これ は2段目にある四つの半加算器(HA)によって行われ る.同様の処理が3段目の半加算器でも行われる.最 後に,3段目にある二つの半加算器の加算出力Sでの 同時検出が,ANDゲートによって出力される.4段 目となるORゲートからの出力があれば,24個のマ クロピクセルのうち少なくとも2個の入力信号がアク ティブになっている. この回路ではロジックゲートの入力間での伝送時間 は同じであると仮定している.しかし,実際には複数 のレーザパルスの出力から距離を算出するため,異なっ 図 9 CMOS SoCの顕微鏡写真 Fig. 9 Photomicrograph of the CMOS SoC.
た伝送長を有するSPADの出力からTOFが計算さ れる可能性がある.起こり得る全ての組み合わせを考 慮して,伝搬時間のばらつきの標準偏差をシミュレー ションで求めた結果,標準偏差の最悪値は100◦にお いて73 psとなった.これは距離に換算すると1.1 cm の誤差になり,十分小さいと考えられる. 4. 3 TDCアレーとDSP回路[13], [16] TDCはLIDARの距離精度を決める重要な部分で ある.今回,四つのTDCを各TOF画素に割り当て, 検出出力を順次四つのTDCに分配することにより, TDCのデッドタイムは10 nsとなり非常に短時間と することができた.TDC読出し回路は各検出出力か ら得たフォトン数と同時にTDC結果も読み取り,同 期FIFOにこれらのデータを書き込む. DSP回路は各マクロピクセルの同期FIFOからデー タを読み取り,3.で述べた時空間相関に基づく信号処 理を行う.ヒストグラム取得及び信号処理を同時に行 うために,DSP回路は,各マクロピクセル当たり二 つのSRAMブロックを利用する.これにより,一方 のSRAMブロックを使用してヒストグラム作成処理 を行っている間に,他方のSRAMブロックは既に作 成された一時刻前のヒストグラム読出しを行う.効率 的に信号処理を行うため,全DSP処理は画素積算時 間以内となるようにした. 4. 4 センサチップの性能評価[12] 開発したセンサチップの顕微鏡写真を図9に示す. チップサイズは6.7 mm× 4.7 mmで,2本のマクロ ピクセルアレーからなる受光領域はその一部であり, DSP回路と32ブロックのSRAMが多くを占めてい る.このデバイスの平均ダークカウントレート(DCR) は室温で2.65 kHzであった.受光領域の面積を考慮 すると,平均DCR密度で6 Hz/µm2に相当する.64
5. 1 静的実験による定量評価 試作したLIDARの定量的な評価実験を実施した. 図10に実験風景を示す.LIDARをターゲットに向け て三脚上に設置し,建物の外壁にターゲットを設置し た.測距性能の評価では,反射率が高い白い拡散反射 体がターゲットとしてよく使われるが,ここでは歩行 者相当と考えられる反射率9%の黒い拡散反射体を用 いた.ターゲットの大きさは1画素の視野より十分大 きくしている.LIDARとターゲットとの距離は10∼ 100 mまで10 m間隔で設定し,各距離において10 fps で1000回の測定を行った.実験時の太陽による背景 光照度は,ターゲット表面に照度計を設置しLIDAR の方向に向けた場合で70 kluxであった.このとき, 照度計を空に向けた場合は100 klux以上であり,ほぼ 最悪の条件に近いと思われる. 設定距離に対する平均測定距離を図11に,同距離 における標準偏差を図12に示す.これらの結果から, 100 mの距離でも反射率9%のターゲットが検出でき ていることがわかる.このとき標準偏差は14.2 cm以 下,測定値と実際の距離との誤差は11.3 cm以下で あった.車載レーダとして非常に良い性能が得られた と考えている. 図 10 実 験 風 景
Fig. 10 Photograph of the outdoor experimental setup.
図 11 各距離における測定値の平均値
Fig. 11 Mean distance values within each set of 1000 measurements as a function of the actual dis-tance.
図 12 各距離における測定値の標準偏差
Fig. 12 Standard deviation as a function of the actual distance.
図 13 測定距離,測定光強度及び参考画像
Fig. 13 Color-coded measured distance, measured intensity, and reference image acquired in daylight conditions.
この図で,一番上の画像は色分けした距離画像であ る.真ん中の画像は測定した光強度を示している.下 の画像は参考画像で搭載した従来カメラで撮影したも のである.LIDARの実際の視野範囲をこの画像に点 線で示す.この図から,歩行者と車両だけでなく多く の路側物をも容易に確認できていることがわかる.他 のセンサでは検出が比較的難しい50∼60 m先の歩行 者や電柱のような幅の狭い障害物もはっきりと捉える ことができ,高機能なADASの実現に向けて有用な センサと考えている.
6.
む す び
高機能な先進運転支援システムの実現に向けて, CMOS SPADを用いた長距離イメージングレーザ レーダを開発した.毎秒10回転の6面ポリゴンミラー と一つの半導体レーザで,55◦× 9◦の視野を202× 96 画素の解像度で検出できる.フレームレートは10 fps である.強い太陽背景光(70 klux)下で反射率9%の 拡散反射体を対象にした定量評価実験により,100 m までの距離画像化を達成した.このレーダは,時空間 相関によるフォトンカウントと信号処理を全て1チッ プで実現したことに特長がある.SPADで構成された 16個のTOF画素と32個の参照画素により,TOF画 像と受動画像の両方を同時に得られる. 強い太陽背景光(70 klux)下で低反射率の拡散反射 体を対象にした評価実験により,100 mにわたって標 準偏差は14.2 cm以下,測定値と実際の距離との誤差 は11.3 cm以下であった.これらの結果は,特に画素 数や信号出力,視野,フレームレートなど性能に直接 影響する重要なパラメータにおいて,車載レーダとし て非常に良い性能が得られたと考えている.謝辞 本研究で用いたCMOS SPADはEPFL(ス イス連邦工科大学ローザンヌ校)及びトヨタ自動車 (株)との共同研究成果である.設計技術を提供頂い たR. Popovic教授と金道敏樹博士に厚く御礼申し上 げます.
文 献
[1] M. Lesemann, J. Lutzow, and A. Zlocki, “eVALUE — A test programme for active safety systems,” 17th ITS World Congress, Busan, South Korea, Oct. 2010. [2] Y. Kimura, T. Kato, M. Ohta, Y. Ninomiya, Y. Takagi, M. Usami, and S. Tokoro, “Stereovision for obstacle detection,” Proc. 13th ITS World Congress, London, Oct. 2006.
[3] R. Lange and P. Seitz, “Solid-state time-of-flight
range camera,” IEEE J. Quantum Electron., vol.37, pp.390–397, 2001.
[4] C. Niclass, A. Rochas, P.-A. Besse, and E. Charbon, “Design and characterization of a CMOS 3-D im-age sensor based on single photon avalanche diodes,” IEEE J. Solid-State Circuits, vol.40, pp.1847–1854, 2005.
[5] S. Kawahito, I.A. Halin, T. Ushinaga, T. Sawada, M. Homma, and Y. Maeda, “A CMOS time-of-flight range image sensor with gates-on-field-oxide struc-ture,” IEEE Sensors Journal, vol.7, no.12, pp.1578– 1586, 2007.
[6] C. Niclass, C. Favi, T. Kluter, M. Gersbach, and E. Charbon, “A 128× 128 single-photon image sen-sor with column level 10b time-to-digital converter array,” IEEE J. Solid-State Circuits, vol.43, no.12, pp.2977–2989, 2008.
[7] C. Niclass, C. Favi, T. Kluter, F. Monnier, and E. Charbon, “Single-photon synchronous detection,” IEEE J. Solid-State Circuits, vol.44, pp.1977–1989, 2009.
[8] G. Zach, M. Davidovic, and H. Zimmermann, “A 16× 16 pixel distance sensor with in-pixel circuitry that tolerates 150 klx of ambient light,” IEEE J. Solid-State Circuits, vol.45, no.7, pp.1345–1353, 2010. [9] D. Stoppa, N. Massari, L. Pancheri, M. Malfatti,
M. Perenzoni, and L. Gonzo, “A range image sen-sor based on 10µm lock-in pixels in 0.18 µm CMOS
imaging technology,” IEEE J. Solid-State Circuits, vol.46, pp.248–258, 2011.
[10] R.J. Walker, J.A. Richardson, and R.K. Henderson, “A 128× 96 pixel event-driven phase-domain ΔΣ-based fully digital 3D camera in 0.13µm CMOS imaging technology,” Proc. IEEE International Solid-State Circuits Conference, Digest of Technical Pa-pers, pp.410–412, 2011.
[11] S.-J. Kim, B. Kang, J.D.K. Kim, K. Lee; C.-Y. Kim, and K. Kim, “A 1920×1080 3.65 µm-pixel 2D/3D im-age sensor with split and binning pixel structure in 0.11µm standard CMOS,” ISSCC Dig. Tech. Papers, pp.396–397, Feb. 2012.
[12] C. Niclass, M. Soga, H. Matsubara, S. Kato, and M. Kagami, “A 100 m-range 10-frame/s 340×
96-pixel time-of-flight depth sensor in 0.18µm CMOS,”
IEEE J. Solid-State Circuits, vol.48, no.2, pp.559– 572, 2013.
[13] C. Niclass, K. Ito, M. Soga, H. Matsubara, I. Aoyagi, S. Kato, and M. Kagami, “Design and characteriza-tion of a 256×64-pixel single-photon imager in CMOS
for a MEMS-based laser scanning time-of-flight sen-sor,” Opt. Express, vol.20, pp.11863–11881, 2012. [14] K. Ito, C. Niclass, I. Aoyagi, H. Matsubara, M. Soga,
S. Kato, M. Maeda, and M. Kagami, “System de-sign and performance characterization of a MEMS-based laser scanning time-of-flight sensor MEMS-based on a
ropean Solid-State Circuits Conference, pp.107–110, 2011.
[17] S. Cova, M. Ghioni, A. Lacaita, C. Samori, and F. Zappa, “Avalanche photodiodes and quenching cir-cuits for single-photon detection,” Appl. Opt., vol.35, no.12, pp.1956–1976, 1996.
[18] C. Niclass and M. Soga, “A miniature actively recharged single-photon detector free of after pulsing effects with 6 ns dead time in a 0.18µm CMOS tech-nology,” Proc. IEEE International Electron Devices Meeting (IEDM), pp.14.3.1–14.3.4, 2010. (平成 25 年 8 月 23 日受付,11 月 29 日再受付, 26年 3 月 17 日公開) ニクラス クリスチアーノ 2003スイス連邦工科大学修士課程了. 2008同大博士課程了.同年(株)豊田中 央研究所に入社.CMOS 単光子検出の研 究に従事し,現在車載向けセンサを主と した,アナログデジタル混載の高速低ノイ ズ CMOS 集積回路の研究を行っている. IEEE会員.理博. 曽我 峰樹 1993東工大・工卒.1995 同大大学院修 士課程了.同年(株)豊田中央研究所に入 社.イメージセンシング,コンピュータビ ジョン,レーザレンジファインダ等の研究 に従事. 松原 弘幸 1988北大・工・応用物理卒.1990 同大 大学院修士課程了.同年(株)豊田中央研 究所に入社.光集積導波路開発や光計測技 術開発を経て,現在車載向けレーザレーダ 開発に従事.SPIE 会員. 1990名工大・工・電気情報卒.1992 同 大大学院博士前期課程了.同年(株)豊田 中央研究所に入社.2010 名工大大学院博 士後期課程了.衛星通信用車載アンテナ, 車載ミリ波レーダ,レーザレーダなどの研 究に従事.工博. 各務 学 (正員) 1982豊橋技科大・工・情報卒.1984 同 大大学院修士課程了.三菱レイヨン株式会 社を経て 1992 より(株)豊田中央研究所 勤務.ポリマー光回路,集積光デバイス, 車載光ネットワークの研究及び標準化に従 事.2008 より IEC エキスパート (TC86), 2013より豊田工業大学大学院連携客員教授兼務.2008 本会論 文賞受賞.応用物理学会,自動車技術会,IEEE 各会員.OSA シニア会員.工博. 内藤 貴志 (正員) 1987名大・工・電子機械卒.1989 同大 大学院修士課程了.同年(株)豊田中央研 究所入社.以来,ロボット,車載用センサ の画像処理,信号処理技術の研究と開発に 従事.現在,同所情報・通信研究部所属. IEEE,日本ロボット学会各会員. 山下 達弥 (正員) 1994北見工大・工卒.1996 北海道大学 大学院修士課程了.2008 豊田工業大学大 学院博士課程了.2008 本会論文賞受賞.現 在,光通信分野の研究に従事.応用物理学 会,IEEE,OSA 各会員.工博.