高精度GPS移動計測装置三菱モービルマッピングシステム
5
0
0
全文
(2) Vol.2011-CVIM-176 No.20 2011/3/18. 情報処理学会研究報告 IPSJ SIG Technical Report. ヤ回転計)を加えた 3 種のセンサの密結合方式 (Tightly-Coupled 方式)を採用している. IMU データは,測量車両の加速度,角加速度の運 動量であり,これをストラップダウン演算処理によ り,測量車両の位置・姿勢を計算する.この計算は 積分を含む処理であり,測位結果は, 「状態量真値 x」 +「低周波誤差成分δx 」としてモデル化される. GPS・IMU・オドメトリ複合計算の目的は,GPS 単独の位置計算に含まれる高周波ノイズの影響と, IMU 単独の位置計算に含まれる低周波誤差成分の 図1. 影響,およびオドメトリによる距離計算に含まれる. モービルマッピングシステム外観. 尚,FKP 方式とは,. スケールファクタの誤差を相互に補完して正確に見. . 広域でも均一な精度の位置計算が可能. 積ることと言える.. . 移動体での位置計算が可能. . 同方式を用いた RTK 測量は国内での公共測. ながら IMU やオドメータの学習・校正をおこなう.. 量実績を持つ. ビル影やトンネル内など GPS が十分に捕捉できな. といった特徴を持つ.. い所では,IMU とオドメータで位置計算を行ない,. これにより,車両中心位置で水平方向に 1~2cm. 精度を保つようにしている.. GPS 捕捉中は上記精度で位置および姿勢を計算し. 精度,垂直方向に 5cm 精度(いずれも公共座標値と. 通常,GPS による位置計算は時間経過に沿って行. のずれ)を達成している.また,補正のための基準. うが,MMS 後処理は GPS,IMU,オドメトリとの. 点には国土地理院が全国に設置している電子基準点. 融合処理を正順(フォワード),逆順(バックワード). を用いているため,国内であれば,利用者は基準点. 両方の計算を行なっている.これにより位置・姿勢. を建てることなく,また,一定の初期化さえ行えば. の精度を向上させている. 図 2 は位置・姿勢計算を正逆両方で行ったときの. 後はどれだけ走行しても複数の基準点データを用い て位置計算が可能である.. 効果を示したものである.この後処理では推定され. GPS と IMU の複合計算は一般的には粗結合方式 ( Loosely-Coupled. る誤差量を計算し,位置・姿勢と合わせて測位誤差. 方 式 ) と 密 結 合 方 式. 量を出力している.公共測量など特に精度が要求さ. (Tightly-Coupled 方式)の 2 種類に大別される.. れる場合は,この測位誤差量を考慮に入れ,精度の. 粗結合方式は,GPS,IMU それぞれのセンサで別個. 良い部分のみ成果にすることで精度を確保する手段. に位置・姿勢計算し,それらの結果をさらに調整計. がとられている.また,現場での計測中でもこの誤. 算を行なう方式である.. 差量が予め予測できるように車内には計測精度を予. 一方,密結合方式は,GPS,IMU それぞれのセン. 測する誤差モニタが表示されている.計測時はこの. サより基本観測量を求め,両者合わせて一括して位. モニタを見て,誤差が多いようなら,近傍で GPS の. 置・姿勢計算を行なう方式である.. 再捕捉行ったりすることで,計測の失敗を予防して. GPS が十分に捕捉されている環境下においては粗. いる. 図 3 はこのイメージを示した図で,計測時は. 結合,密結合の測位精度に大差は見られないが,捕. 警告線の上に予測誤差がでないようにし,後処理後. 捉衛星が少なくなる場合において,密結合の方が精. はデータに支障がでる部分は成果として利用しない. 度保持しやすいという特徴がある.. 等の工夫を行う(図中 FIX とは GPS による測位の. MMS では GPS,IMU に加えてオドメトリ(タイ. 精密解が求まっている状態を云う) .. 2. ⓒ 2011 Information Processing Society of Japan.
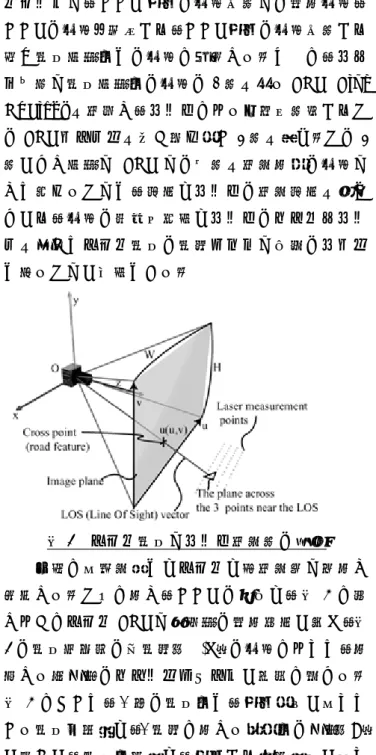
(3) Vol.2011-CVIM-176 No.20 2011/3/18. 情報処理学会研究報告 IPSJ SIG Technical Report. ラメータと,MMS 車両の位置原点との相対位置, MMS の位置・姿勢から,MMS 車両の位置原点から 見た画像平面上での位置に変換する.つぎに,レン ズ中心と画像平面上の位置の 2 点を通る LOS (Line Of Sight)を計算し,レーザによる三次元点群からこ の LOS ベクトルを囲う最も近い 3 点を選ぶ.この 3 点がなす平面と LOS との交点を計測対象の位置と して求めることで,精度はレーザの計測精度を保ち ながら,位置の空間分解能はレーザのスキャンレー トを超えてカメラ画像の画素ピッチと同等のレベル 図 2 正逆による位置・姿勢計算の効果. で得ることが可能である.. 図 3 測位誤差. 図 4 カメラ画像とレーザ計測点の関係. 3.画像・レーザ複合による地物位置計測. 一般に写真測量ではカメラは被計測物と正対し 撮影する.これに対し,MMS の場合は,図 5 に示. MMS に標準で搭載されているレーザスキャナは, 1 秒あたり 13575 点の計測を行う性能を持つ.同レ. すようにカメラ LOS と地表面の相対角度が浅く,図. ーザスキャナでは 40 ㎞/h で走行した場合,レーザ計. 4 の画像座標系の各画素(U,V)の位置によって,対. 測点は走行方向に 14 ㎝程度,横断方向に 9 ㎝程度の. 応する実距離のスケールファクタが極端に異なる.. 間隔がある.レーザスキャナの欠点として,移動し. 図 5 において,1 枚の画像上で,車両近傍が写って. ながらのスキャン計測はどうしてもサンプル点の計. いる画像下方部は,1 画素に対する道路上の距離(A). 測となり計測対象のエッジが捕捉できない.. が短いが,画像上方部は,車両から遠方部分が写っ. 一方,カメラ画像では物体のエッジ情報を容易に. ており,同じ1画素に対する道路上の距離(B)が長. 取得可能であるが,距離情報が得られない.そこで,. い.すなわち,1 画素当りの距離誤差量が画像の位. レーザ計測と画像を複合することで,両者の特徴を. 置により異なる.. 活かした高精度な 3 次元地物計測を行うことが可能 になる[4]. 以下,レーザ計測とカメラ画像の位置合わせ手法 について述べる.カメラ画像は,あらかじめレンズ 歪補正を行った画像上で対象のピクセル位置を画像 認識やユーザによる指示により求める.そのピクセ. 図 5 MMSにおけるカメラ撮影. ル位置を焦点距離,CCD 素子サイズなどのカメラパ. 図 6 は2M ピクセルカメラ(1600(H)×1200(V)). 3. ⓒ 2011 Information Processing Society of Japan.
(4) Vol.2011-CVIM-176 No.20 2011/3/18. 情報処理学会研究報告 IPSJ SIG Technical Report. の MMS 設置例での縦,横それぞれの1画素に対応. ー社製MMS-TRACERTM)の例を図8に示す.本例. する路面での実距離を示したものである.横軸に,. に示すように,地物属性をウインドウ上の候補から. カメラの画素位置, (横方向はカメラ中心位置からの. 選択し,画像上の該当エッジ位置をマウスクリック. 左右の画素位置,縦方向は底部から上方に向かった. するだけで計測が可能であり,操作も直感的かつ容. 画素位置を示す),縦軸に実距離を示している.画像. 易である事がわかる.. 下方部では,1 画素は1cm以下に相当するが,特 に半分より上の部分では 1 画素が 10 ㎝程度に急増す ることがわかる.これは,カメラ画像上での 1 画素 のずれに対する計測誤差と等しい. 図 7 は MMS での実際のカメラ画像に実際の距離 と画素の関係を示したものである.図中,青線は, 2mピッチに対応する画素ピッチを示す.画像手前 では,2m間隔が 426 画素に対応するが,画面中央 付近では,同じ2m間隔でも 102 画素に過ぎず,画 像上部では同じ距離に対応する画素がさらに少なく なっていることがわかる.. 図8. デスクトップサーベイツール. また,首都高中央環状線(山手トンネル)の大橋 JCTを計測した色付き点群の例を図9に示す.本 図のような色付き点群処理では,一定の距離で画像 シャッターを切るとともに,最も近接した画像を用 いてレーザ点に対して色情報を選択するため,道路 渋滞で常に車速が変わっても常に均一の精度で色付 図 6 カメラ画像 1 画素に対する実距離. き点群を得ることができる.地下トンネルでありな がら,相対形状とエッジの連続性が保たれているこ とがわかる.. 首都高中央環状線 (山手トンネル) 首都高3号渋谷線. 図 7 実際の画像における距離と画素の関係 MMSはこのような特性を有しているので,所望の. 大橋JCT. 地物標定精度に応じて,ユーザインタフェース上で 標定に使用する画像エリアを制限して,精度管理を. 図9. 色付き点群の例. 可能にしている.尚,実際にデスクトップサーベイ (机上測量)に用いるツール(アイサンテクノロジ. 4. ⓒ 2011 Information Processing Society of Japan.
(5) Vol.2011-CVIM-176 No.20 2011/3/18. 情報処理学会研究報告 IPSJ SIG Technical Report. 4.MMSによる公共測量. いった属性を付与し,さらにそれら個々をオブジェ. ・NETIS 登録. クトとして 3 次元モデル化する技術開発を今後進め. 国土交通省は公共工事等において活用が期待でき. る予定である.これらの 3 次元空間データが,道路. る民間が開発した新しい技術の情報をデータベース. 周辺インフラ維持管理や計画立案,防災用途に利用. 化している.これが新技術情報提供システム(New. され,安全・安心な生活及び,地球環境保全に向け. Technology Information System:NETIS)である.. たエコロジーにつながることを期待している.. MMS は調査試験・測量・地上測量のカテゴリーにお. 参考文献. いて登録申請し,2009 年に NETIS 登録された (KK-090011). [1]. ・ 公共測量への利用. 吉田光伸. ほか,「モービルマッピングシステ Vol.81,No.8,2007. ム」;三菱電機技報. 測量法第5条に「測量に要する費用の全部又は一. [2]. 部を国又は公共団体が負担し,又は補助して実施す. 吉田光伸. ほか, 「モービルマッピングを用いた. 道路三次元情報の活用」;三菱電機技報. る測量」を公共測量と定め,この成果は今後の工事,. Vol.83,. 取引等に使われる可能性があるため,一定の精度を. No.5,2009. 保つことが必要であることから,測量の方法につい. [3]. て利用する機器や作業方法などをマニュアルで規程. ステムにおける GPS/IMU/オドメトリ複合航法のデ. 瀧口. 純一,橋詰. 匠.モービルマッピングシ. ータ処理と精度管理,日本信頼性学会誌「信頼性」. している.. Vol.32. 一方で技術の急速な進歩により,より効率的・低. No.2,2010.3 月号,2010. コストで高精度な測量技術が出現している為,これ. [4]. Ishikawa. ら新技術を用いて公共測量を実現する道も開いてい. Takumi Hashizume, Takiguchi Jun-ichi, A Study. る.これは「機器等及び作業方法に関する特例」と. of Precise Road Feature Localization using Mobile Mapping. して国土交通省公共測量作業規程の準則第 17 条で. Kiichiro,. Amano. Yoshiharu,. System,. IEEE/ASME. International. on. Advanced. Intelligent. 定めているもので,計画機関(自治体等)より国土. Conference. 地理院に独自測量マニュアルを提出し,技術的な助. Mechatronics.2007.9, ETH Zurich, Switzerland. 言・承認を得ることにより新技術を利用した測量が. [5]. 認められる.MMSが測量の主体としての公共測量は,. 西川. 啓一・瀧口. 精度 GPS 移動計測装置. 純一・石川. 貴一朗,「高. 三菱モービルマッピングシ. 上郡町の下水道計画のための地図作成や,豊中市の. ステム(MMS)」 ;画像ラボ Vol.22 No.1 P74,2011. 道路台帳付図作成に利用[5] され,その後複数の自治. 年 1 月号. 体からの届出により,その成果について順次,国土 地理院の承認を受けている.MMSを導入することに より台帳付図の効率的な作成ができることはもとよ り,交差点の見通し改善や道路面のワダチの把握, 看板や樹木のはみ出しのチェックなど,取得した 3 次元データからまた別の維持管理業務も可能となる.. 5.結言 以上,画像・レーザ複合を特徴とする MMS によ る 3 次元空間計測について述べた.MMS では膨大 な点群と対応した画像が取得できる.それを例えば, 道路面,ガードレール,マンホール,電柱,信号と. 5. ⓒ 2011 Information Processing Society of Japan.
(6)
図
関連したドキュメント
Next, the shear wave velocity profile of the high embankment was calibrated so that the transfer functions in the elastic FEM analysis agree with the observation.. Finally, we
自動運転ユニット リーダー:菅沼 直樹 准教授 市 街 地での自動 運 転が可 能な,高度な運転知能を持 つ自動 運 転自動 車を開 発
視することにしていろ。また,加工物内の捌套差が小
定可能性は大前提とした上で、どの程度の時間で、どの程度のメモリを用いれば計
※調査回収難度が高い60歳以上の回収数を増やすために追加調査を実施した。追加調査は株式会社マクロ
水平方向設計震度 機器重量 重力加速度 据付面から重心までの距離 転倒支点から機器重心までの距離 (X軸側)
電子式の検知機を用い て、配管等から漏れるフ ロンを検知する方法。検 知機の精度によるが、他
運航当時、 GPSはなく、 青函連絡船には、 レーダーを利用した独自開発の位置測定装置 が装備されていた。 しかし、
