兵庫教育大学学校教育学研究, 2018, 第31巻, pp.145-152
リ バ ウ ン ド ジ ャ ン プ ・ コ ン ビネ ー シ ョ ン指導 プロ グ ラ ムの有効性
145
Efficacy of the Program for Teaching Method of Rebound Jump Combination
志 方 亮
-
*
筒 井 茂 喜**
小 田 俊 明***
SHIKATA Ryouichi TSUTSUI Shigeki
ODA Toshiaki
本研究の目的は, リ バ ウ ン ド ジ ャ ン プ ・ コ ン ビネ ー シ ョ ン指導 プロ グラ ム を作成 し , その有効性 を検討す る こ と で あ る . す な わ ち , リ バ ウ ン ド ジ ャ ン プ ・ コ ン ビネ ー シ ョ ンに おけ る熟 練者 と 非 熟練者 の差異 を も と に リ バ ウ ン ド ジ ャ ン プ ・ コ ン ビネ ー シ ョ ンの技術習得 のた めの指導 プロ グラ ム を作成 し , 非熟練者の一般男子学生 5 名に適用, リ バウ ン ド ジ ャ ン プ ・ コ ン ビネ ー シ ョ ンの動作 と 短距離走疾走動作 の プロ グラ ム前後の比較か ら そ の有効性 を検討 し た. その結果, いず れの被 験者 も リ バ ウ ン ド ジ ャ ン プに おけ る RJindex が增大 し , リ バ ウ ン ド ジ ャ ン プお よ びリ バ ウ ン ド ジ ャ ン プ ・ コ ン ビネ ー シ ョ ンの接地時間が短縮 し た. ま た, 短距離走疾走動作ではいず れの被験者 も, 支持脚が接地 し た時に遊脚の膝の角度が小 さ く な る と と も に, 太腿がよ り 前方 に位置す る よ う にな り , 疾走速度が向上 し た. キ ーワ ー ド : 短距離走 , ス プ リ ン ト 技術 , リ バ ウ ン ド ジ ャ ン プ ・ コ ン ビネ ー シ ョ ン, 下肢動作 I は じ めに 小 , 中, 高校生におけ る50m 走の タ イ ムは, 昭和60 年頃 を ピ ー ク に下降ま たは横ばい状態が続い てお り ( ス ポーツ庁, 2017) , 50m 走のタ イ ム向上は喫緊の教育課 題 と な っ てい る. 現在, 疾走速度の向上の技術習得のた めの練習方法と し て, 例えば, 素早い脚の入れ替え動作 や身体全体の軸注
'
) を つ く る た めに曽輪 (2012) はハ ー ド ル を用 い た練習法 を , ま た, 地面 にま っ す ぐ力 を加え る ための脚の踏みつけ動作 を身 につけ る ための練習方法 と し て, 中村 (2011) は高 さ の低いハー ド ルを用い た も の を紹介 し てい る. 加え て, ssc 運動能力 と 疾走能力 と の間に相関関係 を示すこ と が報告 (岩竹ら , 2002) さ れて お り , ス プ リ ン ト ド リ ルにおい て ssc 運動注2 ) で あ る リ バ ウ ン ド ジ ャ ン プ (以下, RJ と 表記す る) が広 く 活用 さ れてい る. し か し , こ れま でに述べた練習方法 を どのよ う な順 に指導す れば最 も効果的 に ス プリ ン ト 技術 を向上 さ せ る こ と がで き るのか, ま たそ れぞれの練習法 の具体的 な指導方法 につい ては明 ら かに さ れてい ない点 が多 く , 十分な科学的知見 も得 ら れていない状況にあ る. 川本 (2008) は短距離走におけ る基本的 なス プリ ン ト 技 術 と し て 「軸 をつ く る」 , 「地面にま っす ぐ力 を加え る」 , 「脚 を同時に入 れ替え る」 を挙げてお り , 実践の場では, こ れら の動作 を協応 さ せ る ト レ ーニ ン グの ひと つ と し て リ バ ウ ン ド ジ ャ ン プ ・ コ ン ビ ネ ー シ ョ ン ( 以 下 , RJ- Comb と す る) が活用 さ れてい る . 志方 ら (2018) は, RJ-c omb 指導法作成のた めの基礎的 な知見 を得 る こ と を日的に RJ-c omb の熟練者 と非熟練者の下肢動作の差 異 を報告 し た. し か し なが ら , そ れを も と に し た指導 プ ロ グラ ムの作成お よ びその有効性の検証には至 っ てい な い. そ こ で本研究では, 志方 ら (2018) の報告 し た RJ- c omb におけ る熟練者 と 非熟練者の動作の差異 を も と に, RJ-c omb の指導 プロ グラ ム を作成 し , そ の有効性 を検 討す る こ と を目的 と し た. そのために, まず非熟練者の 各運動局面 におけ る動作改善の観点 と プロ グラ ム作成の 観点 を導出 し , 次に指導方法 を考案, RJ-c omb 指導 プ ロ グラ ム を作 成 し た . そ し て作 成 し た指導 プロ グラ ム を 一般男子学生に適用 し , 指導 プロ グラ ムの実施前後の RJ と RJ-Comb の動作, お よ び短距離走の疾走動作の観 点 か ら その有効性 を検討す る こ と と し た.II 方法
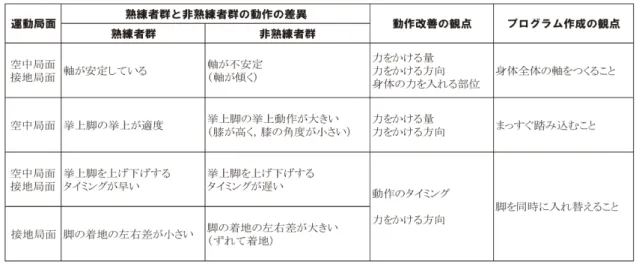
1 . RJ-Comb 指導 プロ グラ ムの作成 志方 ら (2018) は, RJ-Comb の熟練者 と 非熟練者の 動作の差異 を検討 し た結果, 非熟練者の動作は熟練者に 比べ て次 の点 に おい て違い がみ ら れた . 「接 地局面 お よ び空中局面におけ る挙上脚の上げ下げの タ イ ミ ン グが遅 い」 , 「接地局面におい て左右の脚で着地の タ イ ミ ン グに ズレがあ る」 , 「空中局面におい て挙上脚の膝 を高 く あげ, 膝の角度が小 さ い」, 「空中局面において身体全体の軸が 不安定であ る」 . 以上の差異か ら指導 プロ グラ ム作成の観点 を導出, 指 導方法およ び指導順 を検討 し, 指導 プロ グラ ムを作成す る こ と と し た. (1 ) 指導 プロ グラ ム作成の観点お よ び内容 表 1 は, 熟練者 と非熟練者の動作の比較 と プロ グラ ム 作成の観点 を示 し た も ので あ る . 非熟練者は空中局面およ び接 地局面 で上体が傾 く な ど 身体全体の軸が不安定であ る. 非熟練者は力 をかけ る量, 力 をかけ る方向, 身体の力 を入れる部位が不適切であ る ために身体全体の軸が不安定にな る と 考え ら れるので, こ れら を動作改善の観点 と し , 「身体全体の軸 をつ く る こ と」 を プロ グラ ム作成の観点 の一 つめ と し た . ま た, 非熟練者は空中局面において挙上脚の膝が高 く , 膝の角度が小 さ く なり , 挙上の動作が大き い. こ のよ う * 兵庫県立星陵高等学校 * * 兵庫教育大学大学院教育実践高度化専攻小学校教員養成特別 コ ース 准教授 平成30年 7 月 3 日受理 * * * 兵庫教育大学大学院教科教育実践開発専攻生活 ・ 健康 ・ 情報系教育 コ ース 准教授表 1 . 熟練者 と非熟練者の動作の比較と プロ グラ ム作成の観点 連動局面 熱練者群と非熱練者群の動作の豊異 動作改書のa 点 プロ グラ ム作成の
a点
熱練者群 非熱報者群 空中局面 接地局面 軸が安定している 軸が不安定 (軸が傾く) 力 をかける量 力 をかける方 向 身体の力 を入れる部位 身体全体の軸をつくること 空中局面 挙上脚の挙上が適度 挙上脚の挙上動作が大きい (膝 が高く, 膝の角度 が小さい) 力 をかける量 力 をかける方 向 まっすぐ踏み込むこと 空中局面 接地局面 挙上脚を上げ下げする タイミングが早い 挙上脚を上げ下げする タイミングが遅い 動作のタイミング 力 をかける方 向 脚 を同時に入れ替えること 接地局面 脚の着地の左右差が小さい 脚の着地の左右差が大きい (ずれて着地) に動作が大 き く な る こ と で筋 を不必要に長 く 緊張 さ せて し まい, 次の動作が遅れる こ と で接地時に効果的な方向 に力 をかけ る こ と がで き な く な る可能性があ る. そ こ で 「力 をかけ る量」 , 「力 をかけ る方向」 を動作改善の観点 と し , 「 ま っ す ぐ踏み込むこ と」 を プロ グラ ム作成の観 点の二つめ と し た. さ ら に, 非熟練者は熟練者に比べて挙上脚 を上げ下げ す る タ イ ミ ン グが遅 く , 左右の脚がず れて着地 し てい る. こ れは左右の脚の入 れ替え の タ イ ミ ン グが適切で ない と 考え ら れる ので , 「動作 の タ イ ミ ン グ」 と 「力 を かけ る 方向」 を動作改善の観点 と し , 「脚 を同時に入れ替え る こ と」 を プロ グラ ム作成の観点 の三つめ と し た. こ れら に加え , RJ-Comb の動作 を ス プリ ン ト 動作 に つ なげ る こ と がで き る よ う に, 「RJ-Comb のス プ リ ン ト への活用」 を追加 し た. 次 に, 以上の観点 を も と に指導内容およ び指導順 につ い て検討 し た. 「身体全体の軸 を つ く る こ と」 におい て は, 非熟練者の解決す る動作の課題は軸が不安定な こ と であ る. 軸が不安定 なのは, 片脚の離地, 片脚の接地で は支持基底面が狭い ためであり , 支持基底面の広い両脚 で離地, 接地す る運動が適 し てい る と 考え ら れる. ま た, 接地 し た際には接地時間 を短 く す る動作が求め ら れる こ と か ら ssc を利用 し た運動 が有効 と 推察 さ れる . 以上 の こ と か ら , RJ か ら の指導が適 し てい る と 考え ら れた . プロ グラ ム作成の観点の 「 ま っ す ぐ踏み込むこ と」 に おい ては, 非熟練者の解決す る動作の課題は挙上脚の挙 上動作が大き い こ と であ る. こ れは, 挙上に関わる筋肉 が弛緩すべ き タ イ ミ ン グに おい て も 緊張 し 続け てい る た めに, 挙上脚の膝が高 く なり , その結果, 膝の角度が小 さ く な っ た こ と に よ る と 考え ら れる . し たが っ て , 支持 脚 を踏み込んだ後にも う 一方の挙上脚の筋肉 を弛緩 さ せ る動作 を身 につけ る こ と に適 し た スキ ッ プ動作 を行 う こ と と し た. 「脚 を同時に入れ替え るこ と」 においては, 非熟練者 の解決す る動作の課題は, 挙上脚 を上げ下げす る タ イ ミ ン グが遅い, 脚の着地の左右差が大 き い こ と であ る. 挙 上脚 を上げ下げす る タ イ ミ ン グが遅いのは, 過度 な挙上 動作 によ る と 考え ら れる. ま た, 過度の挙上動作が挙上 脚 を下げ る タ イ ミ ン グを遅 ら せ, その結果, 支持脚が着 地 し た時 に挙上脚がま だ接 地す る位置 に下 ろ さ れてい な い動 き につ なが る と 考え ら れる . こ れら につい て も 踏み 込み動作後の挙上脚の筋肉 を弛緩す る タ イ ミ ン グを身 に つけ る必要があ る ため, ス キ ッ プ動作 から 挙上脚 を挙上 後す ぐに脱力するスキ ッ プ動作へ移行する指導 を行う こ と と し た. 前述 し た ス キ ッ プ動作 によ る挙上脚の筋肉 を弛緩す る タ イ ミ ン グが身 につい て き た段階で , そ れま で身 につけ た 「身体全体の軸 を安定 させる動作」 「重心の下にま っ す ぐ踏み込む動作」 「接地時に左右脚 を同時に入れ替え る動作」 を協応 さ せ る指導 を行 う . スキ ッ プ動作の接地 に おい て , 滞空時間 を保 ち つ つ接 地の リ ズ ム を早 く し て い く こ と で脚の入 れ替え を早 く し , 次第に同時着地に近 づけ る こ と で RJ-Comb の動作 を身 に つけ る . さ ら に, RJ-Comb を前 に進みな が ら 行 い , 片脚接 地に変化 さ せ る こ と で ス プ リ ン ト に移行 し てい く こ と と し た. ま た , こ れら の指導順 に つい ては, ま ず, 「身体全体 の軸 をつ く る こ と」 から行 う こ と と し た. そ れは, 疾走 速度 を よ り 高め る ためには, 鉛直方向の大 き な力 を発揮 す る能力が必要であり (土江, 2004) , 「身体全体の軸を つ く るこ と」 は地面から反発力 を得 て重心の水平移動に ロ スな く 力 を伝え るために欠かす こ と がで き ない動作 で, 疾走動作の最 も基本に位置す る と 考え ら れたためであ る. そ し て, 地面か ら の反発力 を強 く す る ためには, 重心か ら の垂線方向 に踏み込む動作 を行 う 必要があ る ため, 次 に 「 ま っす ぐに踏み込むこ と」 を指導 し , 最後に 「脚 を 同時に入れ替え るこ と」 を指導す るこ と と し た. (2) RJ-Comb 指導プロ グラ ム 表 2 は, こ れま で述べたこ と に, 学習内容に対応 し た 指導者の言語教示 を加え て作成 し た RJ-c omb 指導 プロ グ ラ ム で あ る . ①身体全体の軸 を つ く る 身体全体の軸 をつ く る ために, RJ で軸 をつ く る学習 を行 う . 膝 を やわ ら か く 使 っ た ジ ャ ン プで は な く , 接 地 後す ぐ に地面に脚 を突 っ張 るよ う に意識す る こ と で接 地 時間 を短 く し , 弾 く よ う な ジ ャ ン プがで き るよ う にす る. ま た, 二人組での RJ を行 う こ と で空中局面で下降す るリ バ ウ ン ド ジ ャ ン プ ・ コ ン ビネ ー シ ョ ン指導 プロ グラ ムの有効性 表 2 . RJ-Comb 指導プロ グラ ム 動作改善の 観点 フロク'ラム作成の 観点 学習内容 指導者の言語教示 身 力 体 を力 の かを 力 けか を るけ 入 方る れ 向量 る 部 位 身 体 全 体 の 軸 を く る 両 脚 踏 切 ・ 各関節 の動 作 を適正化 し , 接地時間 を短 く す るた めにRJ を行 う . ・ 接地時間 が短 く な る よ う な足 関節の角度 を身 につけ るた めにRJ を行 う . ・ 空中で リ ラ ッ ク スす る よ う 意識 し てRJ を行 う . 上か ら 下へ落 ち る時に下に突 っ ぱ ね る よ う に. 『軟 らかいバネ 』 で なは く 『硬いバネ 』 で. 地面に長 く いないで 空中は軟 ら か く , 接地は瞬間的に硬 く . 踵の高 さ は 1 c m . (イ メ シ) 反発 を強 く 感 じ る足 首の角度, 締 め具合 を覚 え て. 空中は接地の準備 接地の タ イ ミ ン グ を探 っ て. ・ 反発力 を得 る こ と がで き る姿勢 を身につけ るた めに, RJの下降時にパー ト ナーに 肩 を下に押 し て も ら いRJ を行 う . 丹田 を中心に, 3 点の位置関係 を体全体で覚 え よ う . 背 中がま っ す ぐ支 え てい る感 じ に気づい て. 視線 が少 し 下 が るだ け で も反発 が落 ち る. 走 る時 も同 じ. 硬い ボール が着地で た わんで か ら弾む よ う に. 片 脚 踏 切 ・ 踏切方向と 姿勢 を安定 させて片脚で も安定 し た軸 をつ く る こ と ができ る よ う に, 両脚のRJと 片脚のRJ を織 り 交ぜて行 う . 膝は引 き 上げ るのではな く , 緩め る感 じで. 力 を入 れ る時に身体 を し めて. 力 を感 じ る時間 と 場所 と 方向に違いがでない よ う に姿勢 を確認 し て. ・ 踏み切 る方 向 を コ ン ト ロ ールす る こ と を身 につけ る た めに, 着地点 を予想 し な が ら 前に進むRJ を行 う . 反発の解放の方向 を真上か ら 斜め上 (前) にす る感 じで. 動作はその場で行 うRJと 全 く 一緒. 膝で後 ろ に蹴 ら ない よ う に. 前へ進むこ と を急がない. 一歩 が大 き く な ら ない よ う に. 足 が着地点 に行 く のでは な く , 腰 が着 地点の上に移動す る感 じ で. 力 動 を力 作 かを の けか タ るけ イ 方る ミ 向量 ン グ ま っ す ぐ に 踏 み込む ・ ま っ す ぐ な踏み込み を強調 し て ゆつ く り ス キ ッ プ を行 う . ・ 支持脚 の踏み込みに よ る跳躍 を強調 し て ゆっ く り ス キ ッ プ を行 う . ・ 手 と 脚 の動 作 を協応 さ せ, 踏み込みの タ イ ミ ン グ を強調 し て ス キ ッ プ を行 う ・ 挙上脚 を上げす ぎず, 空中局面で リ ラ ッ ク ス し た状態か ら ま っ す ぐ踏み込む動作 を身 につけ るた めに ゆっ く り ス キ ッ プ を行 う . 空中 では大 き く , おお ら かに. 接地は速 く 鋭 く . 足首 を固めて し っ か り 支持脚 を突 こ う . 腕 で体 を上に持 つていこ う . 肘 で タ イ ミ ン グ を と っ て. 空中では リ ラ ッ ク ス し て, 脚 を踏み込む準備 を. 膝で靴 を上か ら ま っ す ぐ押す よ う に. 挙上脚は入れ替 えに よ り 自然に上 に上 がる感 じ で. 挙上脚の膝は弾む よ う に上へ. 膝 を自分で引 き上げない よ う に. 踏 んだ上に乗 り 込 も う . 脚 を下 し な が ら 次に上に吸い 込ま れ る (跳ぶ) と こ ろ を意識 し て . 体 がこ れか ら 移動す る場所 の線 (軌跡) をイ メ シ し て . 同時に脚 を 入 れ替 え る ・ ス キ ッ プ におい て強い反発力 を得 る こ と がで き る姿勢 を身 につ け る た めに, リ ズ ム を早めてい く ス キ ッ プ を行 う . ・ 挙上脚 の膝 を下す踏み込み動 作に よ っ て, 脚 の同時入れ替 え動作 を身 につ け る た めに, リ ズム を早めてい く ス キ ッ プ を行 う . ・ 左右の リ ズムに差 がで ない よ う に ス キ ッ プ を 早めて行い, 左右 の脚の協応 を身 に つけ る た めに, リ ズム を早めてい く ス キ ッ プ を行 う . 頭, 腰, 接地点の3点 を意識 し て 膝は上げない. 膝 を下に突い て. 脚 を突い た ら反対の膝が反動 で上がる感 じ . 空中は リ ラ ッ ク ス. 突い た後 に リ ラ ッ ク ス. 接地の 「 タ ・ タ ー ン」 の 「 タ ・ タ」 を 早 く し て い く . 「 タ ・ タ ー ン」 か ら 「 タ タ ー ン」 , 「 タ ( タ ) ー ン」 , 「 タ ー」 に . ・ 接地 と 脚 の入 れ替 え を早 く す る動作 を身につ け る た めに, 滞空時間 を長 く 保 ち な が ら接地の リ ズ ム を早 く し てい く ス キ ッ プ を行 う . ・ RJ Combの リ ズム を身 につけ るた めに, 脚 の入 れ替 え を早 く し てい く ス キ ッ プ を 行 う . 接地 を巻 き 舌の よ う に弾い て 接地 し た瞬間に挙上脚が弾き 終わっ てい る感 じ で. 弾 き 終わ る と 空中で フ ワ ツ と . 身 動 体 作 の の 力 タ を イ 入 ミ れ ン る グ 部 位 RJ Combの スフ llントへの 活用 ・ リ ラ ッ ク ス し た空中動作か ら, ま っ す ぐ踏み込む動作 を身 につけ るために, 支持 脚 を意識 し たRJ Comb を行 う . ま っ す ぐ膝 で下に突 く . 足首の締めで コ ン ト ロ ール. ・ 着地点 を予想 し踏 み切 る方 向 を コ ン ト ロ ールす る こ と を身 につけ る た めに, 前に 進み なが らRJ Comb を行 う . 入れ替わ る位 置が身 体か ら 違 ざか り , それ を重心 が追い かけ る よ う に. 重心 が前に引 っ 張 ら れ る よ う に, 吸い込 ま れ る よ う に. ハ ムス ト リ ン ク ス の上部 で入れ替え て . ・ 脚 を踏 み込む際に次の挙上脚 を挙上す る タ イ ミ ン グを早めてい き , 片脚接地で行 うRJ Comb動作 を行 う . ハネ が早 く な っ て空中で入れ替え る よ う な感 じ で. 突い た と き には膝 が上 が り 切 っ てい る よ う に. 膝の最高点 と 反対脚の靴の最低点 が同時に現れ る よ う に. 入れ替 え を股関節 に近 い所 で コ ン ト ロ ール し て い く よ う に. 時 に背後 か ら パ ー ト ナ ーに肩 を下 に押 し て も ら い , 反発 力 を得 る こ と がで き る姿勢 と 得 る こ と ので き ない姿勢の 接地感覚の差 を感 じ取り , 反発力 を得る こ と がで き る姿 勢保持の力 を身につけ てい く . 続い て両脚の RJ と 片脚の RJ を織り 交ぜ て行い, 片 脚踏切で も軸 をつ く リ 接地時間が短い動作 を身 につけ る 学習 を行 う . さ ら に前に進みなが ら RJ を行い, 踏み切 り 時に着地位置 を予想す る こ と で重心の水平方向の移動 を意識 さ せ, 踏み切 る方向お よ び踏み切 る力 の程度 を コ ン ト ロ ールする学習 を行う . ② ま つす く、、に踏 み込 む ま っ す ぐ踏み込むために , ゆっ く り ス キ ッ プ を行 う . 空中局面ではリ ラ ッ ク ス し , 踏み込む準備 を早 く 整え る. ゆっ く り し た リ ズ ムで リ ラ ッ ク スす る こ と に よ り 不必要 な筋の緊張 を抑制する. 接地時には手と 脚の動作 を協応 さ せ る こ と で脚 を ま っ す ぐ に踏み込むこ と を強調す る . ま た, 空中局面 で リ ラ ッ ク スす る ために踏み込むこ と を 強調 し , 脚の挙上にあま り 力 を入 れない よ う にす る . そ 147 し て脚 を踏み込 みなが ら腰 が前 に進む感覚 を覚 え る . ③同時に脚 を入 れ替え る ゆっ く り と し た ス キ ッ プ を行 う 段階で脚 を同時 に入 れ 替え る こ と を意識す る . 脚 を踏み込むこ と によ っ て反対 の脚が自然に挙上す るよ う に左右の脚 を協応 さ せ, 脚の 挙上 に あ ま り 力 を入 れな い よ う にす る . 次第 に ス キ ッ プ の リ ズ ムを早 く し てい き , リ ズ ムが変化 し て も 脚の踏み 込みによ っ て反対の脚が挙上す るよ う に し, 脚の同時入 れ替え動作 を身 に付け る学習 を行 う . リ ズムが早 く な っ て も 滞空時間は長 く 保つよ う に し , スキ ッ プの連続す る 同一脚の接地の間隔 を短 く し てい き , 踏み込んだ脚の接 地 と 挙 上脚 の挙 上 の タ イ ミ ン グ を合 わせ る こ と で RJ- Comb の動作に移行 し てい く . ④RJ-Comb から ス プ リ ン ト への移行 RJ-Comb を ス プ リ ン ト へ 移行 す る た め に , ま っ す ぐ 踏み込む動作 を強調 し 前 に進みなが ら RJ-Comb を行 う . 踏み切り 時に着地位置 を予想す る こ と で重心の水平方向 の移動 を意識 し , 踏み切 る方向 を コ ン ト ロ ールす る力 を
身 に つけ る . 次第に挙上脚 を挙上す る タ イ ミ ン グを早め てい き , 空中局面で脚の入れ替え を行 う よ う にす る こ と で ス プ リ ン ト に移行 し てい く . 2 . 学習成果の測定 学習成果は, 指導 プロ グラ ム前後 におけ る RJ と RJ- c omb の動作お よ び短距離走疾走動作の観点から 行 っ た. (1 ) 被験者な ら びに指導者 被験者は, RJ-Comb の非熟練者で あ る一般男子 5 名 (年齢23.6 ±1.9歳, 身長169.9 ±4.5cm, 体重59.1 ±3.6kg) であ る. なお, すべ ての被験者には本実験の趣旨, 内容 な ら びに危険性につい てあ ら か じ め説明 し , 測定途中で も被験者の意思で測定 を中止で き る こ と を確認 し た上で, 参加の同意 を得 て実施 し た. プロ グラ ムの指導は, 陸上競技が専門の高等学校保健 体育科男性教論 (教諭歴22年) が行 っ た. プロ グラ ムに 要 し た時間は 1 時間程度であ っ た. (2) RJ およ び RJ-Comb の動作の測定 ①測定項目 図 1 は, RJ およ び RJ-Comb の動作におけ る測定箇所 を示 し た も の で あ る . 測定箇所は, 股関節, 膝関節, 足関節の角度であ る. 被験者の肩峰, 大転子, 大腿骨外側上顆, 外 , 第五趾 中足骨頭外側の左右合計10点に反射マー カ ー を貼り 付け, 動 作 を 光学式 モ ー シ ヨ ン キ ヤ プ チ ヤー ( ナ ッ ク イ メ ー ジ テ ク ノ ロ ジ一社製) で100 コ マ / 秒 で撮影 し , パー ソ ナ ル コ ン ピ ュ ー タ ーに取 り 込 んだ. ま た, 各動作 の床 反力 の垂直方向 の力 を フ ォ ー ス プ レ ー ト (KISTLER 社製 Type9281B) を用い て測定 し た. アナロ グ信号は ア ン プ に て増幅後 , A/D 変換器 を介 し て サ ン プ リ ン グ周波数 1000Hz で パ ー ソ ナ ル コ ン ピ ュ ー タ ーに取 り 込 んだ. 被験者には準備運動 と RJ, RJ-Comb の動作 を練習 さ せ た後 に , 両手 を腰 に当 て た 姿勢 で , RJ お よ び RJ- c omb を各10回程度, 休息 をは さ んで行 わせ た. その際 に接地時間 を で き る だけ短 く , かつ跳躍高が最大にな る よ う 意識 さ せた. な お , 分析対象 ジ ャ ン プはバ ラ ン ス や リ ズ ムが崩 れ る と か フ ォ ース プレ ー ト から外 れる な どの失敗試技 を除き , 連続 し て安定 し た跳躍の中で RJindex注3) の値 の最 も 大 き な跳躍 と し た. 膝 関節 図 1 . RJ およ び RJ-Comb の動作におけ る測定箇所 ②算出項目 各関節 につい て, 1/100秒 で測定 さ れた角度 を 5 点移 動平均 によ り 平滑化 し , それを も と に角速度, 角加速度 を算出 し た. 地面反力の波形から接地時間と 滞空時間 を 求めて, 以下の式 から跳躍高 を算出 し た. 跳躍高 = 1/8 ・ 重力加速度 ・ 滞空時問 2
( 重力加速度 = 9.80665 m/s2
)
RJindex は, 跳躍高 を接地時間で除す こ と で算出 し た. ③局面定義 フ ォ ース プ レ ー ト か ら 得 ら れた地面反力 に よ り , 両脚 と も 離地 し てか ら どち ら かの脚 が接 地す る ま で を空中局 面, どち ら かの脚が接地 し てから両脚 と も 離地す るま で を接 地局面 と し た. ま た, 空中局面で膝 を挙上す る側の 脚 を挙上脚, 反対の脚 を支持脚と し, 接地局面において は次の空中局面で膝 を挙上す る側の脚 を挙上脚, 反対の 脚 を支持脚 と し た. ④統計処理 空中局面およ び接地局面の各局面に要 し た時間 をそ れ ぞれ100% と し て デー タ を規格化 し , 1 %毎に線形補間 を行 っ た . プロ グ ラ ム前後 の差 の検定 には対 応 のあ る t 検定 を用 い た. なお, 統計処理の有意水準は 5 %未満 と し た. (3 ) 短距離走の疾走動作の測定 ①測定項目 表 3 は, 測定項目 と その定義 を示 し た も ので あ る . な お , 測定は RJ-Comb 指導 プロ グラ ム前後 に行い , ス ト ラ イ ド , ピ ッ チ , 疾走速度 な ど 7 項目か ら行 っ た. ②測定方法 図 2 は, 測定の場の設定 を示 し た も ので あ る . カ メ ラ は ス タ ー ト か ら 30m 地点 の走路幅の中央 か ら 被験者の右側10m の位置に設置 し た. 撮影範囲は最高 疾走 速度 に達 し て い る と 考 え ら れ る ス タ ー ト か ら 30m 地点 を中心に前後 4 m と し , 被験者の大転子, 大腿骨 外側上顆, 外 に マ ー カ ー を貼 り 付け , ハイ ス ピ ー ド カメ ラ (CASIO 社製 EXILIM EX-100) を用いて, 毎秒 120 コ マで撮影 し た. 被験者には十分 な準備運動の後, 50m 走 を行わせた. なお, 測定時は無風 も し く は微風で, 走路の土の状態は 乾い て お り 良好 で あ っ た . ③分析方法 高 速 度 カ メ ラ で 撮 影 し た動 画 は , 動 画 編集 ソ フ ト ー走方向
、
0. 6m/
,a
図 2 . 測定の場の設定t
l 2mリ バ ウ ン ド ジ ャ ン プ ・ コ ン ビネ ー シ ョ ン指導 プロ グラ ムの有効性 表 3 . 測定項目 と その定義 項 目 定 義 ストライド ストライドは, 左右の歩幅の平均とした. 支持脚が着地した瞬間のつま先から, 同一脚が次に着 地した瞬間のつま先までの水平距離 を算出し, 1 歩の平均ストライド を求めた. ピッチ ピッチは1秒あたりの歩数とし, 平均ストライドの1歩に要した時間から算出した. 疾走速度 疾走速度は, ストライドとピッチの積とした. 接地時支持脚角度 接地した瞬間における支持脚の大転子と外1深を結んだ線分が 大転子から下した鉛直線と成す角度. 大転子からの鉛直線上を0 とし, 外1深が進行方向にある側を プラス側とした. 接地時遊脚股関節角度 接地した瞬間における遊脚の大転子と大腿骨外側上顆を結ん だ線分が大転子から下した鉛直線と成す角度. 大転子からの鉛直線上を0 とし, 大腿骨外側上顆が進行方向 にある側をプラス側とした. 接地時遊脚膝関節角度 接地した瞬間における遊脚の膝関節の角度 (大転子と大腿骨外 側上顆を結んだ線分と, 大腿骨外側上顆と外 を結んだ線分の 成す角度) . 支持脚膝関節屈曲角度変位 接地した瞬間における支持脚の膝関節の角度から, 支持脚の 大転子から下した鉛直線と支持脚の外足果が重なった時点におけ る膝関節の角度 を引い た角度. (右図のθ1 θ2)
(Windows Movie Maker ver. 2012) によ り 撮影区間内
の疾走局面 を切 り 取 り , 拡張子変換 ソ フ ト (XMedia Recode ver.3.3.5.0) に よ っ て avi フ ァ イ ルに変換 し , 動 作解析 ソ フ ト (ImageJ ver. 1 48) を用い て分析 し た. ④続計処理 プロ グラ ム前後 の値 の差 の検定 には対 応 の あ る t 検定 を用いた. なお, 統計処理の有意水準は 5 %未満 と し た.
m RJ-Comb 指導 プロ グラ ムの有効性
1 . 結果およ び考察 (1 ) RJ および RJ-Comb の動作 ①RJindex, 跳躍高, 接地時間, 滞空時間 表 4 は, 各被験者の RJ およ び RJ-Comb の プロ グラ ム 前後の変化につい て, RJindex, 跳躍高, 接地時間, 滞 空時間の プロ グラ ム前 (Pre) , プロ グラ ム後 (Post) の そ れぞれにおけ る平均変化量 と 標準偏差 を示 し た も ので あ る . な お , プロ グラ ム後 が プロ グラ ム前 に対 し て向上 し た数値 に つい て ゴ シ ッ ク 太字 で示 し た. 149 RJ に つ い て は , プロ グ ラ ム後 に RJindex の平均 変化 量は有意に増大 し, 接地時間の平均変化量は有意に短縮 し た . RJindex は跳躍高 を接 地時間で 除 し て算出 さ れる 指標で あ り , RJindex が増大す る と い う こ と は跳躍高が 増大す るか接 地時間の短縮, ま たはその両方が要因 と な る . 接地時間がいずれの被験者 も短縮 し てい る こ と から , RJindex の向上は主 に接 地時間の短縮に よ る も ので あ る と 考え ら れる. 跳躍高, 滞空時間は有意ではないが プロ グラ ム後に増加傾向 を示 し ており , 短い接地時間で強い 反発力 を得 る よ う な動作 に変 わ っ た と 推察 さ れる . ま た, 跳躍高 と 滞空時間が増加 し なかっ た被験者 D , E につい て も , 接地時間が短縮 し RJindex が向上 し てい る ため, プロ グラ ムに よ っ て下肢筋 の屈 曲お よ び伸展 に よ る力以 上に地面の反発力 を利用 し た効率的 な跳躍にな っ てい る と 考え ら れる . RJ-Comb に つい て も , プ ロ グラ ム後 に接 地時間 が有 意に短縮 し た. こ れは RJ と 同様に主に接地時間の短縮 に よ る も の で あ る と 考 え ら れ, RJ-Comb に つ い て も 短表 4 . RJ およ び RJ-Comb の プロ グラ ム前後の変化 表 5 . 空中局面におけ る挙上脚の プロ グラ ム前後の変化
RJ
RJindex ilta(cm) 高 接地時間 (msec) 精空時間 (msec)
p 「e Post p 「e Post p「e Post p 「e Post
A 1.87 3.40 27.4 27.S 147 81 473 474 B 2.17 3.21 28.2 30.8 130 96 480 501 c 1.21 2.01 20.6 20.5 171 l 32 410 465 D 2.10 2.47 32.8 27.7 156 l l 2 517 475 E 2.17 2.40 28.6 28.0 132 l l 4 483 478 平均変化量 十0.81 i 0.46 +0.58 1 3.64
-
40.2 1 15.6 十6.0 i 31.9 0.02★ 0.77 0.01・ 0.73 RJ-Comb RJindex (cm) 接地時間 (msec) 清空時間 (m sec) p 「e Post p 「e Post p 「e Post p 「e PostA 0.58 1.57 13.3 l 7.4 227 I l l 329 377 B 1.04 1.37 19.2 16.2 1u 110 396 364 c 0.80 1.18 15.2 l 6.2 190 l 37 352 363 D 1.82 1.44 31.9 16.4 175 114 510 3e6 E 1.65 1.34 25.6 17.9 155 134 457 382 平均変化量 十0.20士0.50
-
4.22 i 6.89-
63.2 1 30.6-
38.4 士67.0 0.47 0.29 0.01★ 0.32*
p<0.05 い接地時間 で強い反発力 を得 る よ う な接地動作 に な っ た と 推察 さ れ る . 被験者 D , E は プロ グラ ム前 で は RJ- Comb の接 地中に挙上脚 を挙上す る と い う RJ-Comb の 動作 がで き てお ら ず, RJ と 同様 に両脚 で踏み切 っ てい た ため, RJ-Comb の RJindex は RJ と 同等の値 を示 し て い た. プロ グラ ム後は挙上脚が接地中に挙上 さ れて踏み 切 り が片 脚 と な っ た こ と で 跳 躍 高 が 減少 し た た め に RJindex が減少 し た と 考え ら れる . 被験者 D , E の プロ グラ ム後の数値は, RJindex, 跳躍高, 接 地時間, 滞空 時間のいずれについても被験者A , B , C と同等の数値 で あ っ た. し たが っ て, 被験者 D , E は RJindex が プロ グラ ム前に比べ減少 し たが, 被験者 A , B , C と 数値面 で同等にな っ たこ と から被験者 D , E の RJ-Comb の動 作 は向上 し た も の と 推察 さ れる . 以上の結果か ら , い ず れの被験者 も RJ, RJ-Comb と も に プロ グラ ム後 に接地時間が短縮 し , RJindex が向上 す る傾向 を示 し た. す なわち, プロ グラ ム前に比べて身 体の軸がで き つつあり , 地面の反発力 を利用す る動作に 改善 さ れた と 考え ら れる . ②空中局面 と接地局面におけ る股関節, 膝関節, 足関節 の動作 表 5 は, 空中局面におけ る挙上脚の プロ グラ ム前後の 変化 を示 し た も ので あ る . 空中局面 におい て股関節の伸 展が始 ま る タ イ ミ ン グ, 膝関節の最小角度が発現す る タ イ ミ ン グについ ては空中局面全体に対 す る経過時間の割 合 (%) で示 し た. 非熟練者は挙上脚 を上げ下げす る タ イ ミ ン グが遅れる 傾向 にあ っ たが, 空中局面におい て挙上脚の股関節 を伸 展 し て挙上脚 を下げ る タ イ ミ ン グは, いず れの被験者 も プロ グ ラ ム後 に早 く な っ た. 空中局面 にお い て挙上脚 を 最 も屈 曲 し た角度は, いず れの被験者 も プロ グラ ム後 に 大 き く な り , 膝 を過度に曲げ ない よ う に な っ た. ま た, 被験者 股関節 展開始 l%) 最小角度 (flog) 1監関前最小角 発現時 ('%) Pre pc8t Pre pc8t pfc pc8t A 22 9 38.7 128.6 34 27 B 18 8 101.3 103.7 18 6 c 19 '「6.4 98.6 25 24 D 的 20 73.5 1的.9 55 0 E 46 0 92.0 114.7 44 0 膝関節 の最小角が発現す る タ イ ミ ン グも いず れの被験者 も プロ グラ ム後 に早 く な っ た . 被験者 A , B , C は プロ グラ ム前から熟練者と 同様に 挙上脚 を上げ る動作 を接 地局面中に行 っ てい たが, 被験 者 D , E にはそのよ う な動作が見 ら れなか っ た. 図 3 は, 被験者 D , E の接地局面におけ る挙上脚の股関節 と 膝関 節の角度の変化 を, 志方 ら (2018) が示 し た熟練者群の 平均 と 合 わせ て示 し た も ので あ る . 被験者D , E の接地局面におけ る挙上脚の股関節 と 膝 関節は, プロ グラ ム前は接地後に屈曲 し , その後伸展 し てい る. つま り , 接地局面では挙上脚 を挙上せず, 挙上 脚 を伸展 し て離地 し てい た. 一方, 熟練者群は接地後に 屈曲 し , そのま ま屈曲 し続け て挙上脚 を挙上 し てい る. し か し なが ら , プロ グラ ム後は被験者 D , E も接地局面 後半 で も 股関節 と 膝関節の伸展が見 ら れな く な り , 接地 局面中に挙上脚 を挙上す るよ う にな っ た. すなわち, 挙 上脚 を上げ下げす る タ イ ミ ン グが早 く な り , 挙上脚の膝 を過度 に曲げな く な っ た と い う 変化は熟練者の動作 に近 づ く も ので あ り , プロ グラ ムによ っ て 「脚 を同時に切 り 替え る」 動作が改善 さ れた も のと 考え ら れる . (2 ) 短距離走の疾走動作 表 6 は, 短距離走におけ る プロ グラ ム前後の変化 を示 し た も ので あ る . プロ グラ ム後 の疾走速度はいず れの被験者 も向上 し た が有意では なか っ た. ス ト ラ イ ド の平均変化率は向上 し たが有意では な く , ピ ッ チ の変化は見 ら れなか っ た. 疾 走動作は, プロ グラ ム後に接地時遊脚股関節角度の平均 変化量が有意に増大 し , 接地時に遊脚の太腿がよ り 前方 に位置す る よ う に な っ た と 考え ら れる . ま た, プロ グラ ム後に接地時遊脚膝関節角度の平均変化量は減少 し, 有 意傾向 を示 し た. 接地時支持脚角度と 支持脚膝関節屈曲 角度変位の平均変化量は 4 名が減少 し, 接地時によ り 身 体の下に接地 し, 接地時に膝の屈曲す る程度が少な く な っ たが, いず れも有意では なか っ た . 以上のよ う に, 平均値 では顕著 な変化はみら れなか っ たが, 被験者個々にみる と , 疾走速度, ス ト ラ イ ド, ピ ッ チ に変化がみら れた. プロ グラ ム後に疾走速度が顕著に 向上 し た被験者 B の疾走動作 をみる と , 接地時遊脚股関 節角度が増大, 接地時遊脚膝関節角度が減少 し ており , 接 地時 におい て遊脚の膝が小 さ く た たま れ, 左右の脚の 切り 替えが早 く な っ た. ま た, 支持脚膝関節屈曲角変位 も 減少 し , 被験者の中で接地時の膝の屈 曲が最 も小 さ く な っ た . こ れら のこ と によ り , ピ ッ チは減少 し たがス トリ バ ウ ン ド ジ ャ ン プ ・ コ ン ビネ ー シ ョ ン指導 プロ グラ ムの有効性 図 3 . 接地局面における挙上脚の股関節 と 膝関節の 角度の変化 ラ イ ト が大幅に増大 し 疾走速度が向上 し た も の と 考え ら れ る . 被験者 A は, 接地時遊脚股関節角度が大幅に増大 し , 接地時遊脚膝関節角度は減少 し た. ピ ッ チは変化 し なかっ たが, 接地時におい て遊脚の膝が小 さ く たたま れ, 左右 の脚の切り 替えが早 く な っ たこ と で ス ト ラ イ ドが増大 し , 疾走速度がやや向上 し た. 被験者 C , D , E は, いずれも接地時遊脚膝関節角度 およ び支持脚膝関節屈 曲角度変位が減少 し てい る こ と か ら , 接地時に膝が小 さ く たたま れ, 左右の脚の切り 替え が早 く な っ た と 考え ら れる. 遊脚が コ ンパク ト かつ早 く 前方にスイ ングし , 支持脚がよ り 身体の真下に近い位置 に接地 し , 支持脚の膝の屈曲が小 さ く な っ たこ と で ス ト ラ イ ドは増大 し なか っ たが ピ ッ チが向上 し , 疾走速度が やや向上 し た と 推察 さ れる . 被験者 D は プロ グラ ム後 に 接地時支持脚角度が大 き く な っ ており , よ り 前方で接地 し たため接地直前の脚加速度が小 さ く な っ てい る と 考え ら れ, そのため同程度 ピ ッ チが向上 し た被験者 C , E ほ ど疾走速度が向上 し な か っ た と 推察 さ れる . 小林 (1990) は, 脚の慣性モ ーメ ン ト を減少 さ せ効率 よ く 脚 を前方へ運ぶために引 き付け角度 を小 さ く す る と 述べ てい る . 本研究 では, いず れの被験者 も接地時遊脚 膝関節角度が減少 し , 接地時股関節角度が増大 し た. つ ま り , 接地時に遊脚の膝関節の角度 を小 さ く し たこ と で 脚の慣性モ ーメ ン ト が減少 し , その結果, 接地時に遊脚 の位置がよ り 前方に位置す る よ う にな り , 脚の入 れ替え 動作 で あ る シザ ーズ動作 が素早 く 行 われる よ う に な っ た と 考え ら れる. ま た, 尾縣 ら (1991) は接地時支持脚角 度 と 疾走速度は有意な相関関係にあ る と 報告 し てお り , 本研究におい て も 4 名が プロ グラ ム後に接地時支持脚角 度が減少 し , 身体の下に近い位置で接地す る よ う にな り 表 6 . 短距離走におけ る プロ グラ ム前後の変化 151 被験者 疾走速度 (m/s) ストライド (cm) ストライド身長比 ピッチ (Hz) p 「e p ost P・ t/]・ p ost P・ tif・ p 「e p ost P・ tif・ p 「e p ost P・ tif・ A 7.48 7.53 1.01 168.3 169.5 1.01 0.99 0.99 1.00 4.44 4.44 1.00 B 7.57 8.25 1.09 164.0 189.1 1.15 0.99 1.14 1.15 4.62 4.36 0.95 c 6.95 7.03 1.01 162.1 161.1 0.99 0.99 0.99 1.00 4.29 4.36 1.02 D 7.35 7.37 1.00 168.4 165.8 0.98 0.97 0.96 0.99 4.36 4.44 1.02 E 7.97 8.06 1.01 182.6 181.4 0.99 1.04 1.04 1.00 4.36 4.44 1.02 平均変化率 +2.5 士3.3 % +2.6士6.4% +2 8士6 2% 0.0士2.8 % p値 0.21 0.46 0.41 0.96 被験者 接地時支持脚角度 (deg) 接地時遊脚 股関節角度 (deg) 接地時遊脚 膝関節角度 (deg) 支持脚膝関節 屈曲角度変位 (deg) p 「e Post p「e Post p「e Post p「e Post A 16.3 16.1 -0.2 -12.8 0.0 12.8 53.4 49.5 -3.9 12.0 14.0 2.0 B 18.4 16.8 -1.6 -12.3 -0.8 11.5 73.1 50.5 -22.6 6.4 4.5 '1.9 c 19.8 15.9 -3.9 -14.9 -12.4 2.5 79.7 65.8 -14.4 7.8 4.7 -8.1 D 9.6 11.8 2.2 -1.6 3.6 5.2 64.2 54.6 -9.6 7.9 6.0 '1.9 E 19.3 17.1 -2.2 -17.2 -12.2 5.1 57.7 56.4 -1.3 15.9 8.5 -7.4 平均変化量 1 1・2.0 +7.0 士4.0 10 3 ・ 7 6 2.4 ・ 3.0 p値 0.33 0 02' 0.05 0.18 疾走速度が向上 し た
*
p< 0.05 IV ま と め 本研究は, RJ-Comb におけ る熟練者 と 非熟練者の動 作 の差異 を も と に RJ-Comb 指導 プロ グラ ムを作成 し , プロ グラ ムの有効性 を検討す る こ と を目的 と し た. 作成 し た プロ グラ ムを一般成人男性 5 名に適用 し , 以下の結 果 を得 た . ・ プロ グラ ム後, いず れの被験者 も RJ, RJ-Comb と も に接 地時間が短縮 し た. ・ RJ-Comb に お い て , い ず れの被験者 も 挙 上脚 を上げ 下 げす る タ イ ミ ン グが早 く な っ た . ・ 短距離走 におい て, いずれの被験者 も接地時に膝 を小 さ く た た み, 大腿部 を よ り 前方 に位置す る よ う に な っ た . ・ 短距離走 に おい て , い ず れの被験者 も シザーズ動作 が 素早 く 行 われ る よ う に な っ た . ・ 短距離走 におい て, 支持脚の膝が接地局面におい て屈 曲す る程度の減少が 4 名におい てみら れた. ・ 短距離走 におい て, 支持脚が接 地時におい て よ り 身体 の真下 に接 地す る変化 が 4 名 におい て み ら れた . 以上のこ と か ら , 本研究は RJ-Comb の指導法の一 端 を示 す と と も に , RJ-Comb の習得が短距離走 に おけ る ス プリ ン ト 技術 の向上 を促す と 推察 さ れた. 注 1 ) 軸 と は, 自 ら発揮す る力 と 反発力 な ど身体の外から かか る力 を運動 におい て効率 よ く 利用 で き る意識, 姿勢 な どの身体の状態 を指す も のであり , 連続す る 運動の中で常に変化 し 続け る も ので も あ る (川本,2008) .
2 ) SSC 運動 と は , 筋 の伸張 一短 縮サ イ ク ル (stretch shortening cycle) を利用 し た運動 で あ る . 筋力 発揮の作 用 時間 の長 さ か ら , 短い ssc ( リ バ ウ ン ド タ イ プ) と 長い ssc ( プ レ ス タ イ プ) の 2 つ に大別 さ れ, ジ ャ ン プ ト レ ーニ ン グの例 で は , 前 者は台 か ら 飛 び降 り て即 座に跳 ね返す ド ロ ツ プ ジ ヤン プ, 後 者はその場から の反動動作つき跳躍 ( カ ウ ン タ ームー ブメ ン ト ジ ャ ンプ) がある (市橋, 2014) . 3 ) RJindex は, リ バ ウ ン ド ジ ャ ン プ にお い て跳躍高 を 踏切時間で除す こ と によ っ て算出 さ れた も ので あり , バ リ ス テ イ ツク な跳躍運動 の遂行能力 を評価す る指 標 と し て用い ら れてい る (遠藤 ら , 2007) .