腫瘍へのアプローチ(経腹膜&後腹膜到達法)と
ナビゲーションシステム
白木良一 深見直彦 深谷孝介 日下 守 竹中政史
要旨 2016年4月,腎癌に対するロボット支援腎部分切除 術(RAPN;Robotic-Assisted partial nephrectomy)の保 険適応が認可された.RAPNはダビンチの高倍率3D画像, 多自由度鉗子等の技術革新により,腹腔鏡下腎部分切除術 (LPN)を進化させた術式として急速に発展している.
RAPNのメリットはLPNにおける鉗子の操作制限が改善さ れ た 事 に よ り, 温 阻 血 時 間(Warm Ischemic Time; WIT)が短縮し,出血・尿漏等の合併症のリスクが低下 した.これにより,ネフロン温存手術(Nephron-sparing surgery;NSS)として術後腎機能が維持されQOLの改善 にも繋がり,腎癌術後の予後改善が期待される.しかし, 触覚の欠如やターゲットまでの距離の問題など,ロボット 支援手術特有の欠点もある.これを補完する為には,術前 に症例毎のアプローチを詳細に検討し,術中には超音波等 によるナビゲーションシステムを用いる事などが,RAPN の安全な導入の一助になる. Key words:腎癌,ロボット支援下腎部分切除術,術中ナ ビゲーション
緒 言
2016年4月に腎癌に対するロボット支援下腎部分切除術 (RAPN;Robotic-Assisted partial nephrectomy)が健康 保険の適応となった.RAPNのメリットは腹腔鏡下腎部分 切除術(LPN)での鉗子操作の制限が改善された事によ り,温阻血時間(Warm Ischemic Time;WIT)が短縮し出血・尿漏等の合併症のリスクが低下した.これにより, ネフロン温存手術(Nephron-sparing surgery;NSS)と して術後腎機能が維持されQOLの改善にも繋がり,腎癌 術後の予後改善が期待される1). 泌尿器科領域では,既に2012年に保険適応となったロ ボット支援前立腺全摘除術(RARP)の豊富な経験により ロボットの基本操作に習熟した後にRAPNへ移行できるの は大きなアドバンテージである.しかし,RAPNでは腫瘍 の位置,サイズ,腎血管等との解剖学的位置関係,患者の 体格などによりアプローチや血管処理等に様々なバリエー ションがありラーニング・カーブも存在する2).これらを 補完する為にも症例毎のアプローチの選択や術前シミュ レーション,術中超音波等によるナビゲーションシステム が有用である.本稿では経腹膜または後腹膜といったアプ ローチの選択および術中超音波検査やICG(Indocyanine Green)を用いたFireflyによるナビゲーションシステムに ついて紹介する.
RAPN症例選択での検討項目
(Table 1) RAPN症例選択での検討項目として,患者選択では性 別,BMI(肥満,toxic fatの有無)や手術既往,合併症 (CKD,imperative or elective,ASA grade等)の有無な どに関する検討が必要である.また,腫瘍の特徴として, 造影CTの詳細な検討により,RENAL,PADUA 等のス 白木良一:藤田保健衛生大学腎泌尿器外科 愛知県豊明市沓掛町田楽ケ窪1-98 藤田保健衛生大学医学部腎泌尿器外科学 白木良一 TEL 0562-93-9257, FAX 0562-93-7863 E-mail:[email protected] Table 1 RAPN症例選択での検討項目患者選択 性別, BMI (肥満,toxic fatの有無) 手術既往 合併症(CKD,imperative or elective, ASA grade等) 腫瘍の特徴 RENAL, PADUA 等のスコア 腫瘍サイズ,位置,左右 内包度 (Endophytic properties) 尿路,血管 および sinusとの距離 アプローチの選択 経腹 or 後腹膜アプローチ
ⒸJapanese Society of Endourology 2016 Japanese Journal of Endourology(2016)29:155-161
コア,腫瘍サイズ,位置,左右および内包度(Endophyt-ic properties),そして尿路,血管 および sinusとの距離 についても評価する.以上の検討より最終的なアプローチ (経腹 or 後腹膜アプローチ)を選択する3).
アプローチの選択
(Table 2) RAPNにおけるアプローチにはLPNと同様に経腹膜およ び後腹膜アプローチがあり,いずれにも習熟している必要 がある.RAPNは鉗子操作の制限が改善され腫瘍切離や腎 実質縫合などの手技が安定したことで,低侵襲性を維持し つつ温阻血時間を短縮する事が可能となった.しかし, LPNに比べ,ロボットアームの干渉のため一定以上の ポート間隔(Siでは最低7cm,Xiでも6cm)が必要となる. RAPNではポート位置の決定およびextraアームの採否等 は重要であり,手術操作の全般を考慮した術前の充分なシ ミュレーションが必要である. 一般的なアプローチとして,腎前面の腫瘍には経腹,後 面の腫瘍では後腹膜アプローチを選択する(Fig. 1).経 腹膜アプローチの利点は解剖学的ランドマークが平易で ワーキングスペースが広いが,欠点として腎動脈へのアプ ローチにやや難があり,周囲臓器の損傷にも注意が必要で ある.一方,後腹膜アプローチでは腎茎部に直接アプロー チする事が可能であり,周囲臓器の損傷が少なく手術時間 も短い傾向がある.しかし,解剖学的ランドマークに乏し く,ワーキングスペースも狭く,カメラとの距離が近いな どの問題もある.このため,腫瘍が腎下極に存在する症例 には腫瘍位置が背面であっても経腹膜アプローチを採用す る事が多い.また,腫瘍周囲にToxic fat が認められる症 例では充分な腎の可動性が得られないため,腫瘍に対し比 較的直線的なアプローチにならざるを得ないなどの制約も ある.他にも,患者のボデイ・イメージによりポート設置 が難しい事もあり,RAPN導入当初は症例毎にプロクター を含めチームとしてアプローチの選択を充分に検討しコン センサスを得る事が肝要である.経腹膜アプローチ
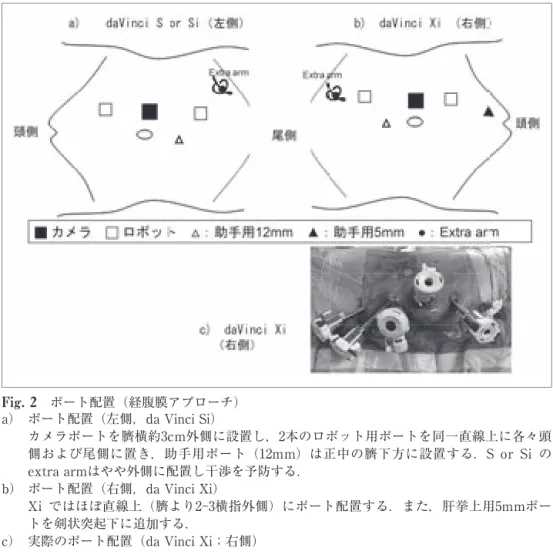
(Fig. 2) カメラポートを患側の臍の高さで約3cm外側に設置し, 2本のロボット用ポートを同一直線上に各々頭側および尾 側に置き,助手用ポート(12mm)は正中の臍下方に設置 する.症例によっては尾側にロボット用ポート(4thアー ム)をさらに1本追加する.da Vinci Xiでは鉗子が細径化 し干渉が少ないため,ほぼ一直線上(臍より2-3横指外側) にポート配置する.右腎例ではこれ以外に肝挙上用5mm ポートを剣状突起下に追加する.カメラおよびロボット用 ポート間は最低7cm(ダビンチXiでは6cmで可)の間隔を 保つよう設置する.Patient Cartは背側よりカメラポート と腫瘍位置の延長線上となる方向よりロールインし各ポー トとドッキングする4). 経腹膜アプローチ 後腹膜アプローチ 利点 ◦ワーキングスペースが広い ◦腎茎部に直接アプローチ可能 ◦解剖学的ランドマークが多い ◦周囲臓器損傷が少ない ◦手術時間が短い 欠点 ◦腎動脈のアプローチにやや難 ◦ワーキングスペースが狭い ◦周囲臓器損傷に注意が必要 ◦カメラとの距離が近い ◦解剖学的ランドマークに乏しい Fig. 1 腫瘍位置による経腹,後腹膜アプローチの選択 一般的に腎前面の腫瘍には経腹(T),後面の腫瘍では後腹膜 アプローチ(R)を選択するが,下極例では腫瘍が背面でもT を採用する事が多い.症例のボデイイメージによりポート設置 が難しい事もあり,アプローチの選択はチームとして充分に検 討しコンセンサスを得る事が必要である.Fig. 2 ポート配置(経腹膜アプローチ) a) ポート配置(左側,da Vinci Si)
カメラポートを臍横約3cm外側に設置し,2本のロボット用ポートを同一直線上に各々頭 側および尾側に置き,助手用ポート(12mm)は正中の臍下方に設置する.S or Si の extra armはやや外側に配置し干渉を予防する.
b) ポート配置(右側,da Vinci Xi)
Xi ではほぼ直線上(臍より2-3横指外側)にポート配置する.また,肝挙上用5mmポー トを剣状突起下に追加する.
c) 実際のポート配置(da Vinci Xi;右側)
Fig. 3 ポート配置(後腹膜アプローチ) a) ポート配置(右側,daVinci Si & Xi)
カメラポートを中腋窩線上に2本のロボット用ポートを各々前後の腋窩線上に設置し,助 手用ポート(12mm)は前腋窩線やや尾側に置く.症例によっては助手用ポートの腹側に ロボット用ポート(4thアーム)をさらに1本追加する.各ポート間は最低7cm(ダビンチ Xiでは6cmで可)の間隔を保つよう設置する.
b) 実際のポート配置(da Vinci Xi)
後腹膜アプローチ
(Fig. 3) カメラポートを患側の中腋窩線上に設置し,2本のロボッ ト用ポートを各々前後の腋窩線上に設置し,助手用ポート (12mm)は前腋窩線やや尾側に置く.症例によっては助 手用ポートの腹側にロボット用ポート(4thアーム)をさ らに1本追加する.カメラおよびロボット用ポート間は最 低7cm(ダビンチXiでは6cmで可)の間隔を保つよう設置 する.特に後腹膜腔内では腫瘍とポートとの距離がとれな い場合も多いので,各ポートは浅めに設置する.Patient Cartは頭側よりカメラポートと腫瘍位置の延長線上となる 方向よりロールインし各ポートとドッキングする.カメラ は腫瘍位置やアームの干渉等の状態によりストレートまた は30°ダウンを使い分ける5).当科における経腹および後腹膜アプローチの比
較
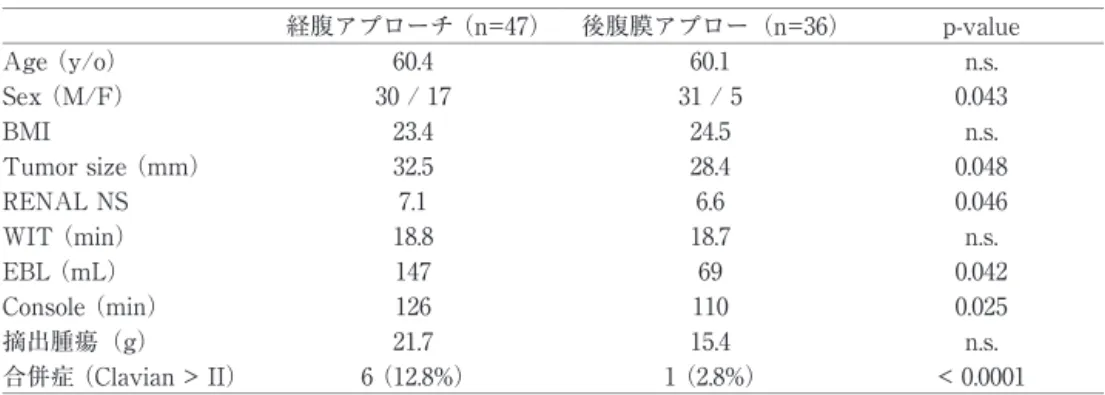
(Table 3) 一般的には後腹膜アプローチは経腹アプローチに比し, 手術時間やWITの短縮,出血量の減少,また在院日数の 経腹アプローチ (n=47) 後腹膜アプロー(n=36) p-value Age (y/o) 60.4 60.1 n.s. Sex (M/F) 30 / 17 31 / 5 0.043 BMI 23.4 24.5 n.s. Tumor size (mm) 32.5 28.4 0.048 RENAL NS 7.1 6.6 0.046 WIT (min) 18.8 18.7 n.s. EBL (mL) 147 69 0.042 Console (min) 126 110 0.025 摘出腫瘍(g) 21.7 15.4 n.s. 合併症 (Clavian > II) 6 (12.8%) 1 (2.8%) < 0.0001Fig. 4 Robotic US 画像(TilePro マルチデイスプレイ) Tile Pro での術中ナビゲーション
上段:ロボット用プローブ使用中の術野
短縮等が報告されている6).当科では2010年の導入以来, 83例にRAPNを施行した.その内訳では経腹,後腹膜アプ ロ ー チ は 各 々 47例(56.6 %),36例(43.4%) で あ っ た. 男女比は経腹で有意に女性例が多く,体型が小さく腎周囲 の剥離が比較的容易である女性例では経腹アプローチが選 ばれる傾向にあった.また,経腹アプローチは後腹膜例に 比べ,腫瘍サイズが大きくRENAL nephrometry score が 高く,より困難度の高い症例では経腹アプローチが選択さ れる傾向であった. 周術期成績ではWITに差は無かったが,後腹膜アプ ローチでコンソール時間の短縮,出血量の減少および合併 症発生の低下が認められた.これらは後腹膜アプローチ症 例に困難度が低い症例が多い事も一因であるが,後腹膜ア プローチでは腎茎部に直接アプローチする事が可能であ り,周囲臓器による影響が少ない事も理由と考えられた.
術中ナビゲーションシステム
術中のナビゲーションシステムとして,TileProマルチ ディスプレイ(TilePro)は非常に有用である(Fig. 4). TileProを用いコンソール画面に投影する事で,視野を外 すこと無く術前に作製した3D血管構築像やCT画像を確認 できる.また,Robotic US probeによる術中超音波画像等 をリアルタイムに確認しつつ手術操作を施行できる.術者Table 4 ロボットUSプローブ(Drp-in probe)の比較〜ALOKA (Alietta) とB&K〜
ALOKA (Alietta) B & K プローブ表面の形状 平坦 球状 超音波画像 Flat - Sector Sector プローブ・コード Soft & Flexible Hard & Rigid Robotic Control プログラスプ鉗子 プログラスプ鉗子
Fig. 5 Firefly system
蛍光色素であるICG(インドシアニン・グリーン)は血中のアルブミンに結合し,波長830nm の光を発する.これがダビンチの近赤外蛍光(Near-infrared fluorescence;NIRF)システム により可視化され,血管や腎実質の血流を確認しつつ手術操作が施行できる.
でき,腎血管剥離の安全性および腫瘍切除の確実性が格段 に向上した7). 2015年に薬事承認されたXiシステムはPatient cart が一 新し,ロボットアームの細径化やポートとの接合性などが 改良された8).そのため,比較的体格の小さいアジア人で の手術操作にもポートの干渉やカメラポートのflexibility など操作性が向上した.また,RAPNではポートからター ゲットまでが近い為,時に鉗子が視野から外れる事があ る.Xiシステムでは視野外に存在する鉗子を補足し鉗子位 置をアラートする機能も有り,安全性の向上が認められて いる. 1. Robotic USプローブ(Table 4) Robotic USプローブは,術者がプローブ本体を直接コ ントロールすることで腫瘍位置やマージンを同定しやす く,様々な方向から臓器に密着でき,より鮮明な画像を得 ることができる9).Robotic USプローブの使用に際しては 術前にUSでの腫瘍形態やecho densityを確認しておく事 が肝要であり,術中は腫瘍の位置やマージンを多方向から 確認でき,腫瘍の深さや血流も観察する事が可能である. 現在,Prograsp鉗子に装着可能な2機種のDrop-in probeが 薬事承認され使用されている.各プローブの特性やUS本 体の汎用性などを検討される事を勧める. 2. Firefly(Fig. 5) ダビンチSiおよびXiにはFireFly™と呼ばれる近赤外蛍 光(Near-infrared fluorescence;NIRF)システムが搭載 可能である.蛍光色素であるICG(インドシアニン・グリー ン)は血中のアルブミンに結合し,波長830nmの光を発す る.ダビンチではこれをNIRFシステムで,可視化する事 により,血管や腎実質の血流を確認しながら手術ができ る. RAPNの部分阻血例では腎実質の血流境界が鮮明に認識 でき,腫瘍切離前に正確な血流領域が視覚化され,USに よる腫瘍マージンとの関係をコンソールで判別確認する事 が可能である.また,血流再開後も腎実質の血流障害の有 無を確認する.Fireflyの使用により,部分阻血において WITの短縮と術後eGFR低下の軽減が認められたとの報告 もある10).
結 語
小径腎癌に対するロボット支援腎部分切除術は低侵襲で ブの短縮,合併症の低下が認められている.RAPNの導入 には,コンソール術者,サージカルサイトの助手,そして 周辺のメデイカル・スタッフを含めたチームワークが重要 である.また,術中には超音波等によるナビゲーションシ ステムを用いる事により,RAPNの安全な導入の一助にな ると考えられる.今後多くの施設でのRAPNの導入が期待 される. 利益相反自己申告:申告すべきものあり文 献
1) Benway BM, Bhayani SB, Rogers CG, et al.(2009) Robot assisted partial nephrectomy versus laparo-scopic partial nephrectomy for renal tumors:A multi-institutional analysis of perioperative outcomes. J Urol 182:866-873
2) Mottrie A, De Naeyer G, Schatteman P, et al.(2010) Impact of the learning curve on perioperative out-comes in patients who underwent robotic partial ne-phrectomy for parenchymal renal tumours. Eur Urol 58:127-132
3) Shiroki R, Fukami N, Fukaya K, et al.(2016) Robot-assisted partial nephrectomy:Superiority over lapa-roscopic partial nephrectomy. Int J Urol 23:122-131 4) 深見直彦,白木良一.(2016)ロボット支援腹腔鏡下
腎部分切除術─経腹膜到達法.臨泌 in press
5) 丸山高広,白木良一,他.(2013)ロボット支援腎部 分切除術の導入と手術手技 後腹膜アプローチ.Jpn J Endourol 26:13-17
6) Hu JC, Treat E, Filson CP, et al.(2014) Technique and outcomes of robot-assisted retroperitoneoscopic partial nephrectomy:a multicenter study. Eur Urol 66:542-549
7) Hughes-Hallett A, Pratt P, Mayer E, et al.(2014) Image guidance for all--TilePro display of 3-dimen-sionally reconstructed images in robotic partial ne-phrectomy. Urology 84:237-242
8) Wilson TG.(2014) Advancement of technology and its impact on urologists:release of the daVinci Xi, a new surgical robot. Eur Urol 66:793-794
9) Kaczmarek BF, Sukumar S, Kumar RK, et al.(2013) Comparison of robotic and laparoscopic ultrasound
probes for Robotic partial nephrectomy. J Endourol 27:1137-1140
10) Autorino R, Zargar H, White WM et al.(2014) Cur-rent applications of near-infrared fluorescence
imag-ing in robotic urologic surgery:a systematic review and critical analysis of the literature. Urology 84: 751-759