膝立ちからの一歩踏み出し動作のメカニズム
13
0
0
全文
(2) 膝立ちからの一歩踏み出し動作のメカニズム. 89. 図 1 開始および終了肢位 (左)開始肢位.手を腰にあて両脚を肩幅に開き膝関節が 90° となる kneeling 位 (右)終了肢位.step 脚膝関節が 90° となる half kneeling 位. を明らかにすることである。 対象および方法. 筋電図は 1 kHz とした。身体動作の計測ではヘレンヘ イズマーカセットを用いた。表面筋電図の対象筋は,予 備実験において,下. 筋群(前脛骨筋,腓腹筋)には一. 1.対象. 定の筋活動が確認できなかったこと,動作開始時に支持. 整形外科的疾患の既往を有しない健常男性 11 名で,. 脚長内転筋,step 脚(以下,右)中殿筋に筋活動をみ. 平 均 年 齢 は 21.6 ± 5.0 歳(18 ∼ 36 歳 ) ,平均身長は. とめたことから,股関節,膝関節周囲筋を中心に考え,. 168.1 ± 5.4 cm,平均体重は 63.6 ± 8.8 kg であった。. 長内転筋,中殿筋,外側広筋,縫工筋,大. 本研究は北翔大学研究倫理審査委員会の承認(承認番. 殿筋とした。なお,今回用いた測定機器は最大で 8 チャ. 号 2013-017)を得て,対象者には研究の主旨,内容につ. ンネルのため,長内転筋は支持脚(以下,左)での動作. いて十分に説明を行い,書面への署名にて同意を得たう. 開始時における筋活動を把握するため左のみで,縫工. えで実施した。. 筋,大. 二頭筋,大. 二頭筋,大殿筋は step 動作中の筋活動を把握. するため右のみで,それ以外の筋は両側で計測した。ア 2.課題. ルコール綿およびスキンピュア(日本光電社製)を用い,. 課題運動は kneeling からの step 動作とし,開始肢位. 国際電気生理運動学会(International Society of Electro-. は手を腰にあて両脚を肩幅に開き膝関節が 90°となる. physiology and Kinesiology:ISEK) の 推 奨 す る 5 kΩ. kneeling 位とした(図 1)。step 動作は,step 脚膝関節. 以下になるように皮膚処理を行い,各筋ともディスポ電. が 90°の位置となるようにリハーサル運動を 10 回行わ. 極(メッツ社製,M-00-S)を中心間距離 20 mm で筋線. せ,本実験では kneeling 位が 3 秒以上静止したことを. 維に沿って貼付した。また,先行研究. 測定者が目視で確認し,口頭指示後に step 動作を 3 回. を step 動作の主動作筋と定義した。. 12). に習い縫工筋. 試行させた。step 脚はボールをキックする脚とし,全 被験者が右脚であった。なお,本動作は予備実験におい. 4.データ分析. て 1.1 ∼ 1.3 秒の所要時間であることが確認され,比較. 計測データの分析では Visual3D(C-Motion 社製)を. 的動作時間が短いこと,個人差が小さいことから step 動作は自然速とした。. 用いた。筋電図の信号処理では,バンドパスフィルター (10 ∼ 500 Hz)を適用した後,筋活動量を定量化する た め に, 全 波 整 流 し 平 均 2 乗 振 幅 値(root mean. 3.測定機器. square;以下,RMS(時間幅を 100 ms に設定))を求. 実験では赤外線カメラ 12 台を含む光学式モーション. めた。反射マーカの座標データから,身体を 13 セグメ. キャプチャ(Motion Analysis 社製,MAC3D) ,床反力. ント(足部,下. 計(AMTI 社製,BP6001200)4 台,および表面筋電図. 手部を含む前腕部,頭部)に分割し,剛体リンクモデル. (S&ME 社製,DL-500)を使用した。サンプリング周波. を作成した。各セグメントの身体部分慣性係数について. 数は,モーションキャプチャは 200 Hz,床反力と表面. 部,大. 部,骨盤部,体幹部,上腕部,. は,慣性質量は,Dempster. 13). を参考にして決定した。.
(3) 90. 理学療法学 第 44 巻第 2 号. また,慣性モーメントについては,マーカ座標を基に,. 意差が生じた場合は Bonferroni 法による多重比較法を. 各セグメントを幾何学図形と仮定し,数学的に求め. 行った。統計ソフトは R2.8.1 を使用し,有意水準は 5%. た. 14). 。. とした。 結 果. 5.分析項目 分析項目は,COP,COG,床反力,下肢 3 関節角度・. COP,COG,床反力,下肢 3 関節角度・関節 M・P,. 関節 M・関節パワー(以下,関節 P),骨盤角度,筋電. 骨盤角度は 11 名の被験者から 33 データ(1 人 3 試技×. データの RMS とした。下肢関節角度については隣接す. 11)が得られたが,その内 1 データは動作開始のやり直. る近位セグメントに対して,骨盤角度については左右. しがみられたため除外し,32 データを平均化して分析. ASIS と両 PSIS の中点の 3 点でローカル座標系を形成. し た。 ま た, 筋 電 図 に お い て は, 動 作 時 筋 放 電 量 が. しグローバル座標系に対して算出し,角度計算では 6 自. kneeling 静止時の 1.5 倍以上の増減値に至らないデータ. 由度角度計算法を使用した。なお,グローバル座標系は,. が 4 データで確認されたため除外し(上記 1 データを含. 床反力計測台に対して左右方向を x 軸(右+) ,前後方. めると 5 データ) ,筋活動開始時間は 28 データにて,筋. 向を y 軸(前方+) ,上下方向を z 軸(上方+)とし,. 活動ピークタイミングは 28 データを平均化して分析. 初期の kneeling 姿勢時には,被験者には y 軸方向を向. した。. かせた。したがって,骨盤前後傾 0°はローカル座標系 が床面に対して平行な状態を意味する。関節 P では正. 1.動作分析. のパワーは求心性収縮を示すことから(+) ,負のパワー. COP と COG 移動軌跡,および経時変化の平均データ. は遠心性収縮を示すことから(−)として表記した。分. を図 2,3 に示す。COP は右前方,左後方,そして左前. 析項目毎に平均と標準偏差(Standard Deviation;以下,. 方へ移動し,その後は動作終了まで左前方付近にとどま. SD)を算出し,COP,COG 移動は身長(m)で,床反力,. る軌跡を示した。その際,前方で 0.3 cm/m,右方で. 関節 M,関節 P は体重(kg)で除し,COP 移動開始か. 2.8 cm/m,後方で 1.7 cm/m,左方で 8.6 cm/m の移動. ら右足部接地直前までの 1 動作を 100%として正規化を. 量だった。COG は左後方,左前方そして右前方へ移動. 行った。筋電図では 1 動作中の各筋ピーク値を 100%と. し,後方で 0.8 cm/m,左方で 6.3 cm/m の移動量だった。. して正規化を行ったが,各筋の活動開始時間については. 動作所要平均時間は 1.17 ± 0.10 秒だった。. 一部の筋が動作開始前に活動を開始する可能性が考えら. COP の移動軌跡から動作の相分けを行い,動作開始. れたため,時間的正規化を行わないで分析した。. からもっとも右方に移動するまでを 1 相(動作開始∼. バイオメカニカルデータの立ち上がり時点を慎重に解. 23 ± 5%の時点)と定義し,2 相は COP が右方から後. 析するため基準値を設けた。動作開始は COP 右移動開. 方へ移動するまで(動作開始 23 ± 5%∼ 48 ± 6%の時. 始時点,step 動作開始は右骨盤の挙上が開始した時点. 点) ,3 相は COP が後方からもっとも左方へ移動するま. とし,COP 移動開始は最初の 50 ms 間で 3 mm 右方へ. で(動作開始 48 ± 6%∼ 66 ± 15%の時点),4 相は右. 移動を開始した時点とした. 12). 。筋活動の開始時点は,. 足の接地直前まで(動作開始 66 ± 15%∼動作終了まで. 動作静止時の 2SD,または 3SD 以上増減した時点とす. の時点)とした(図 2,3) 。この相分類において COG は,. ることが多いが,kneeling は重心線の落ちる位置が支. 動作開始から 3 相初め(動作開始 51%の時点)まで左. 3). とされてお. 後方へ移動し,3 相初めから 4 相途中(動作開始 79%の. り,3SD 以上とした場合静止時での姿勢保持における. 時点)まで左前方移動,そして 4 相途中から動作終了ま. 筋活動を読み取ってしまう可能性が考えられたため,先. で右前方への移動が観察された(図 3)。また,step 開. 持基底面の前縁に近いため不安定な肢位. 12). をもとに COP 右移動開始地点から約 250 ∼. 始とみなした骨盤右挙上運動は 2 相で(図 4) ,右足部. 300 ms 前までの 50 ms 間の平均放電量の 1.5 倍以上増. 離地は 3 相で生じていた(図 5) 。左右前後方向におけ. 加した時点とした。本研究では,各筋の活動が動作開始. る床反力は,後方床反力が 1 相から生じ 1 ∼ 2 相移行期. 時点を基準としていつ開始しているか,また各筋の. でピークに,左方床反力が 1 相から生じ 2 相でピークに,. RMS 波形からピーク活動がどのタイミングで生じてい. 前方・右方床反力が 3 相でピークをむかえた(図 6)。. るかを分析した。. なお,全体平均データと各データで異なるパターンが存. 行研究. 在しないかグラフにて確認を行ったが,COG 移動軌跡 6.統計処理. ではこの傾向から逸脱するパターンはみられなかった。. 筋活動開始時間の比較では,各筋の被験者 11 名の試. 一方で,COP 移動軌跡では 4 相で後方移動するケース. 技データを Shapiro-Wilk 検定にて正規性を確認し,正. が 6 データ(4 被験者)でみられた(図 7,8)。また,4. 規性が認められなかったため Friedman 検定を行い,有. 相で COP が後方移動する 6 データ平均と全体データ平.
(4) 膝立ちからの一歩踏み出し動作のメカニズム. 91. 図 2 1 動作における姿勢変化(上)と COP・COG の移動軌跡(下) (基準(ゼロ)点は動作開始時の COP・COG 位置) 横軸:左右方向成分(右+) 縦軸:前後方向成分(前+) 1 相:COP 移動開始−右前方 2 相:COP 右前方−左後方 3 相:COP 左後方−左前方 4 相:COP 左前方−右前方(動作終了). 均の関節運動,関節 M のグラフ比較では,異なるパター. 左膝関節伸展 M が増加し,右膝関節伸展 M は増加した. ンはみられなかった。. あと減少に転じた。右股関節外転 M は内転 M に切り替. 左右股関節および膝関節の角度と関節 M の経時変化. わったあと内転 M の減少を生じ,左股関節では屈曲 M. を図 9 ∼ 12 に示す。この中で 1 相における両膝関節伸. が伸展 M,内転 M が外転 M に切り替わった。関節 P. 展 M はいずれも減少を示しているように見えるが,そ. では右股・膝関節屈伸が(+),左股・膝関節屈伸が. れを確認する目的で動作開始時からの累積変化率を求め. (−),右股関節外内転が(+)から(−)に切り替わり,. たところ,右で最大 42%,左で最大 70%減少しており. 左股関節外内転が(+)から(−) ,そして(+)に切. (図 10,12),両膝関節伸展 M は減少と判断した。. り替わった。. 1 相では右股関節が屈曲・外転運動,左股関節では屈. 3 相では右股関節の屈曲運動と左股関節の外転運動が. 曲・内転運動し,左膝関節では屈曲運動した。関節 M. 継続するとともに,右膝関節は屈曲運動,左膝関節は伸. では左右股関節屈曲 M,左右膝関節伸展 M が減少し,. 展運動し,左股関節の屈曲運動が伸展運動に切り替わっ. 右股関節外転 M,左股関節内転 M が増加した。関節 P. た。また,右股関節は外転位を維持していた。関節 M. では左右股関節外内転が(+)だった。. では右股関節屈曲 M が維持され,左股関節の伸展 M,. 2 相では左右股関節,左膝関節の屈曲運動が継続し,. 左右股関節外転 M が増加から減少に転じた。右膝関節. 右股関節外転運動が内転運動に,左股関節内転運動が外. は伸展 M が屈曲 M に切り替わり,左膝関節は伸展 M. 転運動に切り替わった。関節 M では右股関節屈曲 M,. を維持していた。関節 P では右股関節屈伸,左右股関.
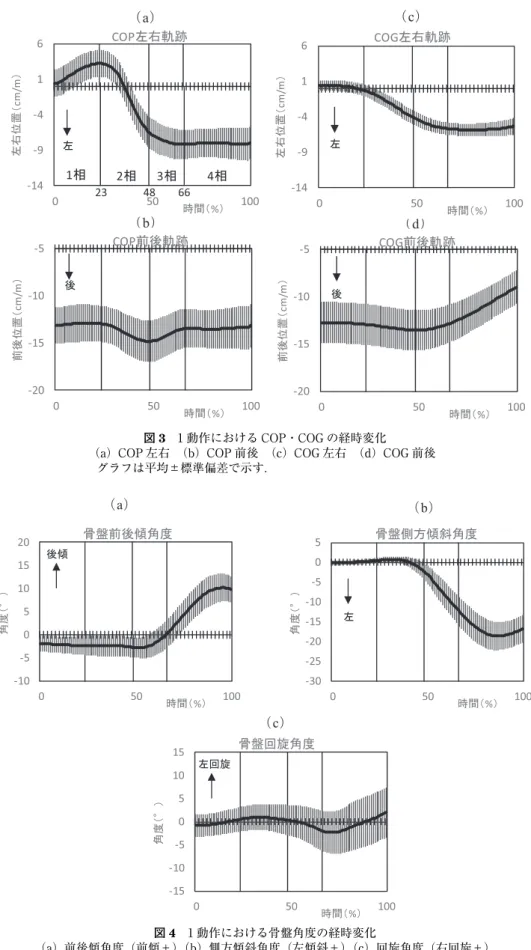
(5) 92. 理学療法学 第 44 巻第 2 号. 図 3 1 動作における COP・COG の経時変化 (a)COP 左右 (b)COP 前後 (c)COG 左右 (d)COG 前後 グラフは平均±標準偏差で示す.. 図 4 1 動作における骨盤角度の経時変化 (a)前後傾角度(前傾+)(b)側方傾斜角度(左傾斜+)(c)回旋角度(右回旋+). 節外内転,右膝関節屈伸が(+),左膝関節屈伸はほぼ. し,右股関節の屈曲運動,左股関節の外転運動が途中か. 0(わずかに+),左股関節屈伸が(−)から(+)に切. ら止まり(その後維持),右膝関節の屈曲運動が伸展運. り替わった。. 動に切り替わった。また,右股関節は外転位を維持して. 4 相では左股・膝関節が伸展運動を継続するのに対. いたが,外転角度には個人差がみられた。関節 M では.
(6) 膝立ちからの一歩踏み出し動作のメカニズム. 図 5 (右下. 93. ,足部が接地した)床反力計測台での 1 動作における垂直床反力の経時変化. 図 7 4 相で COP 後方移動する 6 データ平均の COP・COG の移動軌跡. 節屈伸,左右股関節外内転,右膝関節屈伸が(+)から (−)に切り替わり,左膝関節屈伸が(+)だった。 骨盤運動に関しては,左傾斜運動が 2 相で開始し 4 相 で右傾斜運動に,後傾運動が 3 相で開始し 4 相で前傾運 動に転じた(図 4) 。 2.筋電図分析 動作開始を基準とした際の各筋の平均活動開始時間 は,左長内転筋 ‒ 45 ± 91 ms,右中殿筋 ‒ 24 ± 125 ms, 左中殿筋 85 ± 219 ms,右外側広筋 91 ± 184 ms,右大 二頭筋 107 ± 169,左外側広筋 149 ± 229 ms,右縫 工筋 146 ± 166 ms,右大殿筋 188 ± 301 だった。そして, 図 6 1 動作における床反力の経時変化 (a) 左 右 方 向 成 分( 右 + )(b) 前 後 方 向 成 分( 前 方 + ) (c)上下方向成分(上+). 左長内転筋と右縫工筋,右中殿筋と右縫工筋,左長内転 筋と右大. 二頭筋,右中殿筋と右大. 二頭筋の間で活動. 開始時間に有意な差が認められた(図 13)。 各筋の RMS 波形を分析すると,左長内転筋,右中殿 右股関節屈曲 M が減少したあと増加に転じ,左右股関. 筋は 1 相から 2 相にかけてと 3 相(図 14(a)−ア,イ,. 節外転 M と右膝関節屈曲 M は減少,増加,減少を繰り. (b) −ウ,エ) ,右外側広筋は 2 相と 4 相(図 14(c) −オ,. 返した。左股関節の伸展 M は屈曲 M に切り替わり,左. カ),左中殿筋は 2 相から 3 相にかけて(図 14(d) −キ),. 膝関節伸展 M は維持されていたが,左膝関節伸展 M の. 左外側広筋は 2 相から 4 相にかけて(図 14(e)−ク),. 大きさには個人差が大きかった。関節 P では左右股関. 右大. 二頭筋(図 14(f)−ケ)と右大殿筋は 3 相(図.
(7) 94. 理学療法学 第 44 巻第 2 号. 図 8 4 相で COP 後方移動する 6 データ平均の 1 動作における COP・COG の経時変化 (a)COP 左右 (b)COP 前後 (c)COG 左右 (d)COG 前後. 図 9 1 動作における右股関節角度・M・P の経時変化 (a)屈伸角度(屈曲+) (b)外内転角度(外転+) (C)屈伸 M(屈曲 M −) (d)外内転 M(外転 M +) (e)屈伸 P (f)外内転 P. 14(g)−コ),右縫工筋は 3 相から 4 相にかけて(図 14 (h)−サ)活動ピークをむかえていた。. 考 察 1.動作分析 COP と COG の 移 動 軌 跡 は COG を 取 り 囲 む よ う に.
(8) 膝立ちからの一歩踏み出し動作のメカニズム. 図 10 1 動作における右膝関節角度・M・P の経時変化 (a)屈伸角度(屈曲+) (b)屈伸 M(伸展 M +)※動作開始時からの累積最大減少率 (c)屈伸 P. 図 11 1 動作における左股関節角度・M・P の経時変化 (a)屈伸角度(屈曲+) (b)外内転角度(外転+) (c)屈伸 M(屈曲 M −) (d)外内転 M(外転 M +) (e)屈伸 P (f)外内転 P. 図 12 1 動作における左膝関節角度・M・P の経時変化 (a)屈伸角度(屈曲+) (b)屈伸 M(伸展 M +)※動作開始時からの累積最大減少率 (c)屈伸 P. 95.
(9) 96. 理学療法学 第 44 巻第 2 号. 図 13 1 動作における各筋活動開始時間 (1)左長内転筋(2)右中殿筋(3)左中殿筋(4)右外側広筋(5)右大 二頭筋 (6)左外側広筋(7)右縫工筋(8)右大殿筋 グラフ内の数字は,動作開始を基準とした際,各筋の筋活動開始時間の平均と標準偏 差を示す.. COP が 存 在 し,COP は 右 前, 左 後, 左 前 移 動 し た。. 長内転筋が 1 相から 2 相にかけてピーク活動を示してい. COG は 1 相で左後方,3 相で左前方,4 相で右前方移動. た。したがって,右中殿筋,左長内転筋が求心性に活動. が生じていた。歩行開始動作において,Brunt ら. 15). は,. 踏み出し脚が支持脚に体重を移す働きがあると述べてお り,Breniere ら. 16). は,step 動作開始前の相には前進の. した結果,COP が支持脚と反対方向に移動したことが 考えられる。これに対して,両股関節の屈曲運動はわず かに増加するものの屈曲 M が減少,関節 P はほぼ 0 で,. ために必要な状況をつくりだす役割があることを報告し. 右縫工筋や右大殿筋,右大. ている。kneeling からの step 動作にも同様のメカニズ. めなかった。よって,この相において両股関節屈曲・伸. ムが働き,COP が step 脚方向に移動することで COG. 展筋には一定の役割がない可能性が高い。膝関節では左. を支持脚方向に移動させ,COG を step 進行方向に移動. の屈曲運動が増加し,左右の伸展 M が減少していたが,. させるための準備活動として COP の後方移動が生じて. 右の関節運動,左右の関節 P に変化はみられなかった。. いたと考えられる。そして COP は支持脚方向に先行す. また,両外側広筋の筋活動にも変化がみられなかった。. ることで,その後の COG の支持脚方向への移動を制動. これらのことから,1 相では右膝関節の筋群に動的な役. していたと考えられる。床反力は COG 加速度を反映し. 割はなく,左において外側広筋の筋活動が変化しないに. 17). 二頭筋に筋活動の増加は認. ,左方床反力が 1 相から生じ 2 相でピー. もかかわらず屈曲運動が増加,伸展 M は減少,関節 P. クをむかえたことは COG が 1 相から 2 相にかけて左方. が変化しなかったことは左膝関節屈曲筋の求心性活動. 加速度を増し,右前方床反力が 3 相でピークをむかえた. (左外側広筋との同時収縮)の存在が示唆され,その結. ているため. ことは COG が 2 相から 3 相にかけて右前方加速度を増. 果 COP が前方移動した可能性が考えられた。. していたことになり,これらを支持するものと考える。. 2 相では右股関節屈曲運動が継続するとともに,右股. COP の移動軌跡が 4 相で後方移動するケースがみられ. 関節屈曲 M が増加しはじめ,関節 P が(+) ,右縫工筋,. たが,全体平均での 4 相では COP は左前方位付近にと. 右大殿筋,右大. どまる軌跡を示していた。また,COP が 4 相で後方移. から 4 相で,右大殿筋,右大. 動するデータ平均と全体データ平均の比較では関節運. ク)していた。したがって,右縫工筋の求心性活動によ. 動,関節 M にパターンの差異はみられなかった。これ. り振り出し動作が開始されるが,同時に右大殿筋,右大. らのことから,4 相では COP 移動軌跡に変動性を認め. 二頭筋の活動が増加(右縫工筋は 3 相 二頭筋は 3 相で活動ピー. 二頭筋が拮抗筋として活動することで右股関節屈曲運. るものの,機能的役割に相違はない可能性が考えられた。. 動を制動している可能性が考えられた。また,右股関節. 動作開始相である 1 相では右股関節外転運動,外転. の外転運動が内転運動に,外転 M が内転 M に,関節 P. M,左股関節内転運動,内転 M がそれぞれ増加してお. が(+)から(−)に,左股関節の内転運動が外転運動. り,関節 P はいずれも(+) ,筋活動では右中殿筋,左. に,内転 M が外転 M に,関節 P が(+),(−) ,(+).
(10) 膝立ちからの一歩踏み出し動作のメカニズム. 97. 図 14 1 動作における各筋活動の経時的変化 グラフ内の矢印は各筋の RMS 波形ピーク値を示しており,(a)(b)(c)の 3 筋に 2 峰性の振 幅がみられる.. の順に切り替わった。このとき,骨盤右挙上運動も開始. の遠心性活動,そして左中殿筋の求心性活動に切り替わ. し,筋活動では左中殿筋が活動ピーク(2 相から 3 相に. ることで骨盤を右挙上させ,step のための準備動作が. 8). は,歩行では遊脚. 行われていることが考えられた。右膝関節では屈伸運動. 側の骨盤が下降するのに対し,膝歩きでは足部と床面と. に著明な変化がみられなかったが伸展 M が増加後減少. の距離を確保するため遊脚側の骨盤が挙上すると述べて. し,関節 P が(+),右外側広筋が活動ピークをむかえ. いる。以上から,本動作において右中殿筋,左長内転筋. ていた。床反力では前方成分が拡大していた。右外側広. の求心性活動が減弱することで COP がそれまでの右方. 筋の活動による膝関節伸展作用で COP が後方移動し,. から左方向に転換し,続いて右股関節内転筋,左中殿筋. COG の前方加速(前方床反力)を発現していたことが. かけて)をむかえていた。相本ら.
(11) 98. 考えられるが,右大. 理学療法学 第 44 巻第 2 号. 二頭筋,右縫工筋が同時期に活動. が考えられた。また,左股関節の外転運動が途中から止. したことで右外側広筋との同時収縮になったため,膝関. まり,外転 M が減少,増加,減少を繰り返し,関節 P. 節伸展運動が生じなかった可能性が考えられた。これに. が(+)から(−)に切り替わっており,左中殿筋が継. 対し左股・膝関節では屈曲運動,左膝関節の伸展 M が. 続して活動することで右足部接地に向けた準備として骨. 増加し,左股関節の屈曲 M が伸展 M に切り替わり,関. 盤の側方傾斜を調節していることが考えられた。左股・. 節 P は股・膝関節ともに(−) ,左外側広筋が 2 相から. 膝関節では伸展運動が継続して増加し,左股関節伸展. 4 相にかけて活動ピークをむかえていた。床反力垂直成. M は途中から屈曲 M に,左膝関節伸展 M は維持され,. 分が上方を示していたことからも,左股関節伸展筋,左. 関節 P は左股関節屈伸が(+)から(−)に切り替わり,. 外側広筋が遠心性活動を強め,股・膝関節屈曲運動を制. 左膝関節屈伸が(+)だった。そして,床反力の前方成. 動することで,身体保持に貢献していることが考えら. 分が拡大し,骨盤運動では後傾運動が前傾運動に切り替. れた。. わった。これらのことから,左外側広筋が求心性活動す. 3 相では右足部離地が行われる時期で,右股・膝関節. ることで膝関節伸展動作を強め COG 前方移動を加速さ. の屈曲運動,左股関節の外転運動が増加するとともに,. せ,左股関節伸展筋が求心性活動を行うことで骨盤の後. 右股関節が外転位を維持し,関節 M では右股関節屈曲. 傾運動を継続するが,最終局面で左股関節屈曲筋が遠心. M が維持するのに対し,左右股関節外転 M が増加から. 性活動をすることで骨盤後傾運動を制動し,右足部接地. 減少に転じ,右膝関節伸展 M が屈曲 M に切り替わった。. に向けた準備活動を行っている可能性が考えられた。こ. 関節 P は右股関節屈伸,左右股関節外内転,右膝関節. の相では右股関節の外転角度や左膝関節伸展 M の大き. 屈伸がいずれも(+)で,左長内転筋と右中殿筋が二峰. さで個人差が大きかったが,右股関節の外転位保持,左. 目の活動ピークをむかえていた。このとき,床反力左右. 膝関節伸展運動・伸展 M の増加は各データに共通して. 成分が右方で最大値を示していた。したがって,左中殿. いる結果であり,右足部接地にむけた調整的役割を担っ. 筋の求心性活動により骨盤右挙上運動が拡大するが,同. ていることに相違はないものと考えられる。ただ,今回. 時に左長内転筋が遠心性活動することで骨盤右挙上運動. の研究結果からはこれ以上言及することはできない。. を制動し,COG の左方移動を抑制していたと思われる。. 左右股関節屈伸 M は反対称性を示しており,右股関. そして,右中殿筋が右股関節外転位を維持するため活動. 節屈曲 M と左股関節伸展 M が同時期(2 相)から増大. を高め,2 相ではじまった右縫工筋による右下肢振り出. し,同時期(3 相初め)に減少しはじめる。石井. し運動が拡大(右大殿筋,右大. 二頭筋はその制動)し. 歩行において体幹を直立な状態に保持するためには,左. たことで COP が前方移動し,右足部が離地したことが. 右の股関節の屈伸筋力が拮抗する張力として骨盤に作用. 考えられた。左股・膝関節では伸展 M を維持しながら,. する必要があると述べているが,本動作においても骨盤. 左股関節では屈曲運動が伸展運動に,関節 P が(−). は 3 相初めまでほぼ直立位を保持しており,同様の役割. から(+)に切り替わり,左膝関節では伸展運動が増加. がある可能性が考えられる。. 18). は,. したが,関節 P はほぼ 0(わずかに(+) )だった。また, 左股関節伸展運動と同時期に骨盤の後傾運動が開始して. 2.筋電図分析. いた。これは,左外側広筋が等尺性に近い状態(わずか. 本動作平均所要時間は 1.17 ± 0.10 秒とばらつきが小さ. に求心性活動)で活動することで膝関節屈曲位を維持. かった。したがって,動作速度の個人内,個人間差が筋. し,左股関節伸展筋が遠心性活動から求心性活動に切り. 活動開始時間に与える影響は無視できるものと考える。. 替わることで骨盤後傾運動を発現させ,振り出し運動を. 左長内転筋,右中殿筋の 2 筋が主動作に先行して筋活. 補助していることが考えられた。. 動を開始しており,いずれの筋も振り出しの主動作筋と. 4 相では右股関節が外転位を維持しながら屈曲運動が. 定義した右縫工筋よりも有意に筋活動開始時間が早かっ. 途中で止まり,右膝関節の屈曲運動が伸展運動に切り替. た。Belen’kii. わった。そして,右股関節屈曲 M が減少後増加,右股. 先 行 随 伴 性 姿 勢 調 節(Anticipatory Postural Adjust-. 関節外転 M,右膝関節屈曲 M は減少,増加,減少を繰. ments;以下,APA)と名づけ,Crenna ら. り返しており,関節 P は右股関節屈伸,外内転,右膝. 方方向運動課題における APA の役割として,身体への. 関節屈伸いずれも(+)から(−)に切り替わり,右外. 外部力の初期構成を正確に調整し,ある特定の前方課題. 側広筋が二峰目の活動ピークをむかえていた。したがっ. 動作の産出のために主動作の収縮が適切に相互作用する. て,右縫工筋,右中殿筋,右大殿筋が活動を減弱させ,. ようにすることと述べている。つまり,前方に一歩踏み. 右外側広筋の求心性活動による右膝関節伸展運動を右大. 出す課題においては,支持脚方向への重心移動が重要で. 二頭筋の遠心性活動で制動することで,振り出し運動 を調整し,右足部接地に向けた準備をはじめていること. あり. 19). は,主運動に先行して出現する活動を 20). は,前. 21). ,kneeling からの step 動作においては左長内転. 筋,右中殿筋がその役割を担い,step 動作に先行して.
(12) 膝立ちからの一歩踏み出し動作のメカニズム. 筋活動が出現したことが考えられた。歩行開始や立位か らの step 動作では,APA として step 脚の前脛骨筋や 中殿筋の活動が確認されている. 12)15)20). のに対し,本. 動作では step 脚の中殿筋のみならず,支持脚の長内転 筋にもその役割が確認された。kneeling からの step 動 作では COG が支持脚方向に平均で 6.2 cm/m 移動して お り, 側 方 移 動 が 大 き い と い う 動 作 的 特 徴 が あ る。 Murray ら. 22). は,振み出し脚への COP 変量が大きい. ほど,水平面上における COG を支持脚へ移動させる モーメントが増大すると述べており,支持脚長内転筋が step 脚中殿筋とほぼ同時期に活動開始することで COP の step 脚方向への移動を補助していたことが考えられ た。歩行開始動作において,Brunt ら. 15). は,step 脚が. 支持脚方向に COG を移す働きがあるとしており,本動 作においても step 脚にその役割があるものの,支持脚 にもそれを補う働きがあることが示唆された。 本研究の限界点 本研究の限界点として,関節 M には拮抗筋による同 時収縮や他関節筋,靭帯等による作用が含まれてしまう ため,それらの影響度合いを把握できていないことが挙 げられる。特に,今回筋電図にて測定できていない筋群 が拮抗筋となった場合の解釈は,推測の域を脱し得な い。また,本研究は若い健常成人男性を対象としており, 性別,年齢の違いで動作戦略が異なることが予想され, 本研究結果をそのまま中高齢者や有疾患者に適用するこ とには注意が必要である。 今後は,臨床において有用なデータを提供するために も,今回測定した 8 筋以外の筋活動についてもその詳細 を明らかにしていくこと,高齢者,有疾患者毎に分析を 行い動作戦略の違いを明確にすることが重要になると考 える。 ま と め kneeling か ら の step 動 作 は,COP の 右 前 方 移 動, COG の左後方移動ではじまり,その後 COG を取り囲む ように COP が先行した移動軌跡を示した。そして左長 内転筋と右中殿筋の 2 筋が COP 移動開始前に活動を開 始しており,これら筋群の早期の活動は本動作を遂行す るうえで重要になることが考えられた。 文 献 1)内閣府共生社会 政策統括官:平成 22 年度高齢者の住宅 と生活環境に関する意識調査結果.2009.. 99. 2)丸田和夫,真砂良則:在宅で暮らす女性高齢者の居住様 式の実態と体力特性.北陸学院短期大学紀要.2009; 39: 361‒370. 3)中村隆一,齋藤 宏,他:基礎運動学(第 6 版).医歯薬 出版,東京,2003,pp. 288‒345. 4)星 文彦,盛 雅彦,他:健常高齢者の背臥位からの起き 上がり動作─動作パターンの推移について─.総合リハ. 1990; 18(1): 45‒50. 5)PM デービス:Steps To Follow.シュプリンガー・フェ アラーク東京,1996,pp. 217‒220. 6)五十嵐博中,石合純夫,他:脳卒中最前線─急性期の診断 からリハビリテーションまで─(第 3 版) .福井圀彦,他 (編),医歯薬出版,東京,2006,pp. 81‒91. 7)木下一雄,中村香織,他:膝立ちにおける筋活動に関する 基礎研究.総合リハ.2006; 34(9): 894‒896. 8)相本啓太,太田 進,他 : 歩行と比較した膝歩きの特性. 理学療法学.2011; 38(2): 90‒96. 9)兵頭甲子太郎,丸山仁司:立位・膝立ち位における前方 リーチ動作の比較.理学療法学.2008; 23(2): 183‒187. 10)前田里美,早川由佳理,他:膝立ち位における側方重心移 動動作の運動力学的分析.理学療法の歩み.2003; 2003(14): 45‒50. 11)川上真吾,鈴木博人,他:片膝立ち位保持と股関節外転 筋の筋力発揮特性との関係.理学療法の歩み.2014; 25(1): 42‒46. 12)Ito T, Azuma T, et al.: Anticipatory control related to the upward propulsive force during the on tiptoe from an upright standing position. Eur J Appl Physiol. 2004; 92: 186‒195. 13)Denptster WT: Space Requirements of the Seated Operator: Geometrical, Kinematic, and Mechanical Aspects of the Body with Special Reference to the Limbs. WADC Technical Report. Wright-Patterson Air Force Base, OH. 1955: 55‒159. 14)Robertson G, Caldwell G, et al.: Research Methods in Biomechanics. Human Kinetics, 2004, pp. 55‒71. 15)Brunt D, Lafferty MJ, et al.: Invariant characteristics of gait initiation. Am J Phys Med Rehabil. 1991; 70: 206‒211. 16)Breniere Y, Bouisset S, et al.: Are Dynamic Phenomena Prior to Stepping Essential to Walking? J Mot Behav. 1987; 19: 62‒76. 17)江原義弘,山本澄子:ボディダイナミクス入門 歩き始め と歩行の分析.医歯薬出版,東京,2002,pp. 106‒113. 18)石井慎一郎:レクチャーノート 歩行の臨床バイオメカニ クス(改訂版).南西書店,神奈川,2012,pp. 38‒49. 19)Belen’kii VY, Gurfinkel’ VS, et al.: Elements of control of voluntary movement. Biofizika. 1967; 12: 135‒141. 20)Crenna P, Frigo C: A motor program for the initiation of forward-oriented movements in human. J Physiol. 1991; 437: 635‒653. 21)Lyon IN, Day BL: Control of frontal plane body motion in human stepping. Exp Brain Res. 1997; 115: 345‒356. 22)Murray MP, Seireg A, et al.: Center of gravity, center of pressure, and supportive forces during human activities. J Appl Physiol. 1967; 23: 831‒838..
(13) 100. 理学療法学 第 44 巻第 2 号. 〈Abstract〉. The Mechanisms Involved in Moving from a Kneeling Position to a Forward Step Movement. Masashi NINOKAMI, PT, MS Shimada Neurosurgical Clinic Keizo YAMAMOTO, PhD Hokusho University. Purpose: We aimed to clarify the mechanisms involved in moving from a kneeling position to a forward step movement. Methods: We investigated the forward step movement from a kneeling position in 11 normal subjects. The series of movements were divided into four phases using center of pressure (COP) movement: phase I involved COP movement to the front of the stepping leg; phase II involved COP movement to the back of the supporting leg; phase III involved a left backward-left forward COP mobile phase; and phase IV involved a left forward-right forward COP mobile phase. Results: Prior to COP movement, we found that the left adductor longus muscle and right gluteus medius muscle showed activity. For phase I, the center of gravity (COG) was observed at the back of the supporting leg. For phase II, the right back movement of COG continued. For phase III, the left forward movement of COG occurred. For phase IV, the right forward movement of COG occurred. Conclusions: In the forward step movement from kneeling, we propose that it starts from COP movement to the front of the stepping leg and COG movement to the back of the supporting leg. The supporting side adductor longus muscles and stepping side gluteus medius muscles stat activity before COP movement, which is essential to the forward step movement from kneeling. Key Words: Kneeling, Step, Biomechanics.
(14)
図

関連したドキュメント
The only thing left to observe that (−) ∨ is a functor from the ordinary category of cartesian (respectively, cocartesian) fibrations to the ordinary category of cocartesian
The inclusion of the cell shedding mechanism leads to modification of the boundary conditions employed in the model of Ward and King (199910) and it will be
This means that finding the feasible arrays for distance-regular graphs of valency 4 was reduced to a finite amount of work, but the diameter bounds obtained were not small enough
Keywords: continuous time random walk, Brownian motion, collision time, skew Young tableaux, tandem queue.. AMS 2000 Subject Classification: Primary:
Answering a question of de la Harpe and Bridson in the Kourovka Notebook, we build the explicit embeddings of the additive group of rational numbers Q in a finitely generated group
Then it follows immediately from a suitable version of “Hensel’s Lemma” [cf., e.g., the argument of [4], Lemma 2.1] that S may be obtained, as the notation suggests, as the m A
In our previous paper [Ban1], we explicitly calculated the p-adic polylogarithm sheaf on the projective line minus three points, and calculated its specializa- tions to the d-th
Our method of proof can also be used to recover the rational homotopy of L K(2) S 0 as well as the chromatic splitting conjecture at primes p > 3 [16]; we only need to use the
