図 1 アイオワ大学水理科学工学研究所(IIHR)本館
はじめに
筆者は、大阪大学工学研究科地球総合工学専攻に 在職中の 2011 年 4 月から 2012 年 10 月まで、アイ オワ大学水理科学工学研究所で客員研究員として 1 年半滞在し、同大学に新しく建設された波浪水槽の 立ち上げ業務に従事するという貴重な経験に恵まれ ました。また、筆者にとってこの滞在が転機となり、
この 3 月をもって阪大を退職し、4 月より同研究所 で働き始めました。今回、本誌への執筆の機会をい ただきましたので、この新しい水槽の概要について ご紹介させていただきます。
アイオワ大学水理科学工学研究所について
現在私が勤務しているアイオワ大学水理科学工学 研究所(IIHR)についてご紹介します。アイオワ 大学は、アメリカ中西部アイオワ州東部のアイオワ シティに本部があり、11 学部、教職員一万三千人、
学生数三万人の 1847 年に創立された州立の総合大 学です。メインキャンパスの中心部を流れるアイオ ワ川沿いに私の勤務する IIHR の本館があります。(図 1)IIHR は創始から 90 年以上の歴史をもつ流体力 学の研究所で、研究対象は大気や河川、環境、生体
など多岐にわたります。
私は船舶流体力学を扱う Frederick Stern 教授の 研究室に所属しています。Stern 教授のグループは、
長年 CFDShip-Iowa という CFD(数値流体力学)
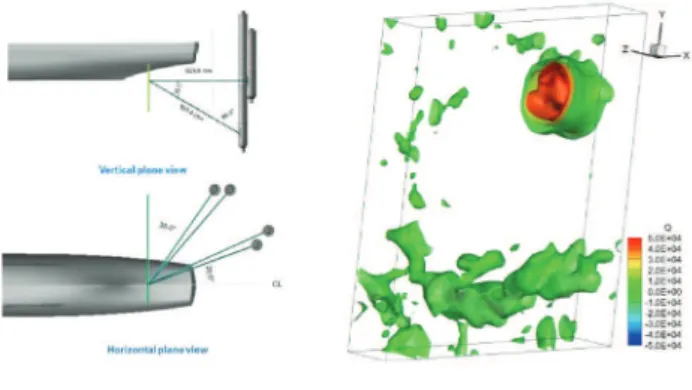
計算コードを開発しており、研究所とネットワーク で結ばれた全米各地のスーパーコンピュータを用い て、大規模なシミュレーションが日夜行われていま す。このコードを用いて、波浪中を航行する船のシ ミュレーションや、船体周りの流れと波の相互干渉 など、これまで未解明であった現象の詳細について も明らかになりつつあります。一方、このコードの 計算結果を検証するため、実験計測にも力を入れて います。IIHR 本館地下には長さ 100 m の曳航水槽 があり、ここでは没水型ステレオ PIV(粒子画像流 速測定法)システムを用いた流場計測が行われてい ます。一昨年からはさらに進化した没水型トモグラ フィック PIV システムも導入されました。これは 空間内の三次元渦構造を瞬時にとらえることができ る世界初のシステムです。(図 2)
Stern 教授の研究室と私の所属していた船舶海洋 工学部門船型デザイン領域は 30 年以上の繋がりが
− 60 − 生 産 と 技 術 第65巻 第3号(2013)
眞 田 有 吾 *
* Yugo SANADA 1977年7月生
2007年3月大阪大学大学院工学研究科地球 総合工学専攻博士後期課程修了後、(独)海 上技術安全研究所、大阪大学工学研究科助 教を経て、現職。
現在、IIHR-Hydroscience & Engieering, The University of Iowa
Associate Research Scientist 博士(工学)
船舶海洋工学 TEL:+1-319-400-1896
E-mail:[email protected]
アイオワ大学の新しい水槽(Wave Basin)について
若 者
Introduction of IIHR Wave Basin
Key Words:Ship hydrodynamics, PIV, Wave basin, CFD, EFD
図 3 新水槽施設内部 図 2 トモグラフィック PIV システム(左)により
得られた三次元渦構造(右)
あります。私の恩師であり元上司でもある戸田保幸 教授(地球総合工学専攻船舶海洋工学部門)も 25 年前に IIHR に滞在されており、それ以来 Stern 教 授とは共同研究をされています。そのご縁もあって、
2011 年 4 月から私がアイオワへ滞在させていただ くことになりました。
新しい波浪水槽の建設
前出の CFDShip-IOWA は、船舶の推進性能だけ
でなく、波浪中の操縦性能や耐航性などにも適用範 囲が広がりつつあります。しかし、検証データを取 得するには曳航水槽では難しいことから、波浪中で 模型船の自由航走試験が可能な新たな水槽が建設さ れることになりました。新水槽はアイオワ大学の新 キャンパス、オークデールリサーチパークに建設さ れることになり、2010 年 7 月に竣工しました。総 工費は 5 億円で、うち 3 億円は ONR(アメリカ海 軍海事技術本部)から、残りの 2 億円は大学内基金
(同窓会等)からの援助を受けています。このプロ ジェクトには計画段階から戸田教授が技術アドバイ ザーとして参加されており、電車、造波機の施工は 三真製作所(神戸)、森技術研究所(大阪)が担当 しました。水槽の大きさは、長さ 40 m ×幅 20 m × 深さ 3 m で、阪大水槽と同型のプランジャー式造波 機が 6 台、曳引台車、消波ビーチを備えています(図 3)。一見ごく普通の水槽ですが、この水槽が非常に ユニークなのは、自由航走する模型船まわりの局所 流場計測(PIV および波面計測)を行うための各種 機能を備えていることです。
− 61 −
生 産 と 技 術 第65巻 第3号(2013)
新水槽のユニークな機能
では、新水槽のユニークな機能について簡単にご 紹介します。
1)模型船の自動追尾・航跡の再現機能
新水槽の台車は自由航走する模型船を自動追尾す る機能を備え、模型船の位置・方位角(X, Y, θ)
のデータを取得することができます。また、取得し た航跡を忠実に再現するプログラム運転機能も有し ています。台車は東西方向(X)に移動する主台車、
南北方向(Y)に移動する副台車とターンテーブル
(θ)から構成されています。模型船には船首およ び船尾部分に赤外線 LED が設置されており、副台 車に設置された 2 台のカメラがこれらを捉え画像処 理することで、模型船と副台車との位置・方位角偏 差を算出し、これらを入力値とする PI 制御で台車 による自動追尾が行われます。
2)模型船着脱システム
自由航走試験を行う際には、模型船の初期位置を 水槽内で毎回同一地点に合わせ、模型船の加速を補
助する着脱システムを用います。着脱システムは、
鉛直方向移動が自由のパンタグラフと、水平方向移 動・ロール・ピッチが自由な 3 自由度マウントから 構成されています。マウント先端部は電磁石となっ ており、通電すれば模型船上に設置されたマウント と吸着し、模型船を台車に拘束することができます。
拘束状態で模型船を加速させ、設定速度に達した時 点で模型船を解放することで、自由航走および自動 追尾を開始することができます。拘束状態で、自動 追尾で得られた航跡を用いて1)のプログラム運転 機能を行えば、模型船は位置・方位角のみ台車によ って決定され、その他の 4 自由度(鉛直方向・水平 方向・ロール・ピッチ)は自由となるので、自由航 走時とほぼ同じ状態が再現されます。この状態で局 所流場計測を行います。(図 4)
3)非接触 6 自由度運動計測システム
自由航走試験では、主として模型船に搭載された ジャイロで運動計測が行われていますが、ドリフト が発生して精度が低下するという問題があります。
これに加え、新水槽では模型船の鉛直方向移動量を 計測する手段がありませんでした。そこで、画像に
− 62 − 生 産 と 技 術 第65巻 第3号(2013)
図 4 模型船着脱システム(左:加速時、右:自由航走時)
図 5 非接触6自由度運動計測システム
よる非接触 6 自由度運動計測システムをこちらに来 てから独自に開発しました。模型船上部にターゲッ トボードを設置し、これをカメラで撮影し、このタ ーゲットボード画像を元に、模型船の 6 自由度運動 を計測するというものです(図 5)。単一のカメラ で 6 自由度運動を計測でき、カメラ台数を増やすこ とで模型船の大傾斜にも対応できます。
立ち上げ業務とアイオワ大への転職
2011 年 4 月に私が客員研究員としてこちらに来 てからは、まず水槽試験ができる環境づくりをしま した。また、阪大から四年生と修士二年の学生二名 にも半年間来てもらい、電車・造波機や各種システ ムの基本性能の確認、計測システムの精度チェック、
模型船の自由航走試験などを一緒に行いました。新 しい水槽を任されるというのは、大変なプレッシャ ーでしたが、学生達の協力のおかげもあり、滞在期 間の一年半でなんとかまともなデータをとれるよう になりました。来た当初は新水槽に郵便物や宅配便 もまともに届けてもらえないぐらい大学内での認知 度も低かったのですが、今では水槽の訪問客も増え、
アイオワ観光の新しい穴場スポット(?)となりつ つあります。
この滞在中に私はさらに PIV 計測をやる予定だ ったのですが、結局その手前の準備だけで終わって しまいました。これから面白くなるところで終わっ てしまい、できることなら最後まで自分でやりたい と思っていたのですが、阪大に籍をおいたままこれ 以上アイオワに滞在することは他の先生方にもご迷 惑がかかるため、非常に難しい状況でした。滞在が 終わりに近づいた頃、Stern 教授から「実験できる 人間が少なくて困っている。阪大を辞めてアイオワ へ来ないか?」と誘っていただきました。しかし、
阪大を辞めてアイオワ大へ移るとなると、学生の時
に借りた育英会の奨学金の返済をしなければいけな くなるとか(海外で働く場合は免除対象外)、アメ リカで働いて日本に戻ったら年金や保険等はどうな るのか(?)等々、多少の不安は頭をよぎったもの の、結局は今の自分がやりたいことを優先すること にし、アイオワ大学へ移ることを決めました。また、
戸田先生や他の先生方も、私のキャリアのためには 良いということで、快く後押ししてくださいました。
私は英語が下手なので不安ではありますが、こちら でしばらく頑張りたいと思います。
おわりに
アイオワ新水槽は順調なスタートを切り、現在 PIV 計測にむけて着々と準備が進んでいます。立派 な水槽ができたとはいえ、現在は私以外に動かせる 人間が少ないという状態なので、アイオワ大学の学 生さん達に実験を教えて、今後もより難しい実験に もチャレンジしていきたいと思っています。まずは 全米の中で最もアクティブで面白い水槽だと言って いただけるように頑張りたいと思います。
謝辞