続性を考慮した設計が必要であると考える. 最後に,本検討では鞭打ち症を軽減するための一つの要素 としてシートフレームの剛性均衡に着目して検討を行った. しかし,車両のシート形状はスポーツタイプやラグジュアリ タイプなど多岐にわたるため,この形状の違いも鞭打ち症を 軽減するための性能に寄与する要素の一つとして考慮する必 要があると考える.また,乗員の体型とシートとの相対位置 (特に頭部とヘッドレスト)も考慮した設計も必要であると 考える. 5.結 言 (1) 本稿では,頭部と胴体との運動差を低減して鞭打ち症 を軽減するための手法の一つとして,乗員の頭部と胴 体とを支持するシートフレーム各部位の剛性の均衡 に着目して検討を行った. (2) まず最初に頭部と胴体との運動差が少ない乗員挙動 になるためのシートフレーム剛性の均衡を模式図を 用いて示した(Phase1~2). (3) 次に乗員挙動の制御に肝要と考えるシートバック (K1)の作用を検証するための試作実験を行った. (4) その結果,頭部と胴体との相対差を保持するためには シートバックのエネルギ吸収作用が有用であること がわかった.さらに,ヘッドレスト(K2)と軟質部材 (K3)との均衡にもシートバック(K1)の運動エネ ルギの吸収作用が有用であることもわかった. (5) また,このシートフレームの剛性の均衡をシートの設 計要件に適用する場合の考え方の一例を示した. (6) さらに,乗員のリバウンド挙動(Phase3)における頭 部と胴体との運動差について実験結果を用いて考察 し,シートフレーム剛性の連続性がリバウンド挙動に よる運動差を低減する方策の一つであることを示唆 した. (7) 最後に,本検討では鞭打ち症を軽減するための一つの 要素としてシートフレームの剛性均衡に着目して検 討を行ったが,シートの形状や乗員の体型とシートと の相対位置も考慮した性能設計が必要であることを 示唆した. 参 考 文 献 (1) 財団法人交通事故総合分析センター, ヘッドレストは正 しい位置に! , No.66, p.4(2007).
(2) ISO 17373, Road vehicle-Sled test procedure for evaluating occupant head and neck interactions with seat/head restraint designs in a low speed rear end impact (2005).
(3) UNECE(United Nation Economic Commission for Europe), PROGRESS ON THE DEVELOPMENT OF NEW GLOBAL TECHNICAL REGULATIONS AND ON THE
AMENDMENTS OF GLOBAL TECHNICAL REGULATIONS Group on gtr No. 7 (Head restraints), Economic and Social Council GTR7-01-08(2009a), available from
<http://www.unece.org/trans/doc/2009/wp29grsp/GTR7-01-0
8e.pdf>, (参照日 2009 年 12 月 10 日).
(4) UNECE, Development of GTR7(Formal Document GRSP), Economic and Social Council (2013b), available from <
http://www.unece.org/fileadmin/DAM/trans/doc/2013/wp29gr
sp/ECE-TRANS-WP.29-GRSP-2013-24e.doc>, (参照日2014
年1 月 14 日).
(5) Sekizuka, M., Seat Designs for Whiplash Injury Lessening, 16th ESV conference, Paper No.98-S7-O-06, p.1570-1578(1998).
(6) Sawada, M. and Hasegawa, J., Development of new Whiplash Prevention Seat, 19th ESV conference, Paper No.05-0288,
(2005).
(7) Bjorn, L., Lotta, J., Bo, A., Martin, L. and Lennart, S., THE WHIPS SEAT - A CAR SEAT FOR IMPROVED PROTECTION AGAINST NECK INJURIES IN REAR END IMPACTS, 16th ESV conference, Paper No.98-S7-O-08, p.1586-1596(1998).
(8) 澤田正英, 相知正人, むち打ち傷害低減シートの開発, 自動車技術会論文集, Vol.40, No.2, Paper No.20094159, p.283-288 (2009).
(9) Maeda, T., Mori, M., Sakai, M., Hitota, K., Kino, H., Matsubayashi, K., Okawa, T. and Akaike, F., Development of Pre-Crash Intelligent Head Restraint, SAE, Paper No. 2008-01-0513, (2008).
(10) Merts, H. and Patrick, L., Strength and Response of the Human Neck, SAE, Technical Paper No.710855, pp.2903-2928(1971).
(11) EuroNCAP, THE DYNAMIC ASSESSMENT OF CAR SEATS FOR NECK INJURY PROTECTION TESTING PROTOCOL, EUROPEAN NEW CAR ASSESSMENT PROGRAMME Version 3.2 (2014), available from < http://euroncap.blob.core.windows.net/media/1922/euro-ncap-whiplash-test-protocol-v32.pdf >, (参照日2014年12月9日).
ヒヤリハットデータベースによる追突ヒヤリハットの分析
*― 低速および高速の追突ヒヤリハット発生状況の比較 ―
藤田 光伸1) ポンサトーン ラクシンチャラーンサク2) 永井 正夫3)
Rear-end Incident Analysis Based on a Near-miss Incident Database
- Comparison between Low-speed and High-speed Rear-end Incidents - Mitsunobu Fujita Pongsathorn Raksincharoensak Masao Nagai
Image and vehicle data recorded by drive recorders are analyzed to clarify the difference of rear-end near-miss incidents between the low-speed (20 km/h or lower) and the high speed (40 km/h or higher) regions. The major understandings to be drawn from the analysis are as follows. There are significantly fewer relevant factors involved in the low-speed incidents than high-speed incidents. In the cases of low speed, small overlap cases account for a comparatively high percentage in the number of incidents whereas the actual accidents have different tendency. In the case of high speed, rear-end incidents after another car cuts in front of a subject car accounts for a considerably higher percentage compared with the low-speed cases.
KEY WORDS: Safety, Drive Recorder, Near-miss Analysis, Rear End Collision (C1)
1.緒 言 日本の交通事故は,死亡者数が4,500 人を下回り(4,113 人, 2014 年データ(1),以下同様),第一次交通戦争(1970 年にピ ークの16,765 人)および第二次交通戦争(1992 年にピークの 11,452 人)の時期と比較すると,その数は半数以下にまで減 少した.そして,人身事故発生件数(573,465 件)および負傷 者数(709,989 人)も近年は減少傾向にある.しかしながら加 害者・被害者を問わず,交通事故が当事者に与える影響は非 常に大きく,更なる事故件数の低減が望まれる. 自動車保険データに注目すると,年間の損害物数は700 万 件近くを数え(6,887,731 件,2012 年度データ(2),以下同様), その数的規模は人身事故件数に比べて非常に大きい.経済的 損失については,自動車の修理費を代表とする物的損失額の1 兆7,958 億円に対し,人身損失額が 1 兆 4,448 億円と,人身事 故および物損事故(物件事故)のいずれにおいても,社会に 与えている影響は無視できないほど大きい. そして交通事故を事故形態でみると,警察庁(1)および自動車 保険(2)いずれのデータにおいても,物損事故を含む自動車保険 データの車両単独事故以外では追突事故の割合が最も多く, 追突事故の減少が事故件数低減に対する重要な課題のひとつ であることは間違いない. 追突事故の回避・被害軽減を主な目的とした自動車の予防 安全技術として,前方の車両や歩行者などの障害物を検知し, 衝突が発生しそうな危険な状況においてブレーキに対して自 動制動を施す緊急自動ブレーキ(AEB: Autonomous Emergency Braking)システムが多くの車種に搭載され始めている.そし て2014 年から,欧州の安全評価基準である Euro NCAP(3)では AEB の性能試験が総合評価に組み込まれ,日本の JNCAP で も,予防安全性能アセスメントとして試験結果の公表が開始 された.このようなAEB システムは交通事故件数の低減に有 用であると思われるが,現実で高頻度に発生している事故状 況をより多く考慮に入れることで,その効果が更に高まるこ とが期待できる. 以上の背景の下,本報では,ドライブレコーダに記録され たデータを使用し,追突ヒヤリハット(追突しそうな危険な 事象)の発生状況を明らかにすることを目的とする. 2.ヒヤリハットデータベース 2.1. ヒヤリハットデータベースの概要 ヒヤリハットデータベースとは,2005 年より公益社団法人 自動車技術会が中心となり,タクシーに装着したドライブレ コーダのデータをデータベース化したものである.2010 年 11 月より,データの登録・運営業務を東京農工大学 スマートモ ビリティ研究拠点 ドライブレコーダデータセンターが実施 している.2015 年 1 月現在,東京都内,静岡市内,札幌市内, 福岡市内,および秋田県由利本荘市内のタクシー計200 台以 上にドライブレコーダが装着されている. このドライブレコーダには,カメラ(1 または 2 台),加速 度計,GPS 装置および複数の外部入力端子が内蔵されており, 衝突や急ブレーキ等によって事前に設定された閾値以上の加 速度が計測されると,それをトリガとして15 秒間(トリガ前 10 秒からトリガ後 5 秒)の前方映像(2 台のカメラがある場 合には室内映像も),速度推移,加速度,ブレーキと方向指 示器の信号,および位置情報が記録される. 記録されたデータは,映像情報を基にデータベース管理者 によって事故,ヒヤリハット,それ以外に分類される.事故 とヒヤリハットについては更に,事故形態,危険レベル,衝 突(しそうになった)相手物の種類,直前の自車・相手車両 (人)の動作,車線数,天候等の情報が登録される.2014 年 11 月時点で,約 99,000 件のヒヤリハット(1 カメラのデータ 約62,000 件/2 カメラのデータ約 37,000 件),および約 400 件の事故が登録されている(約300 件/約 100 件). *2015 年 6 月 18 日受理. 1)・2)東京農工大学(184-8588 東京都小金井市中町 2-24-16) 3) (一財)日本自動車研究所(105-0012 東京都港区芝大門 1-1-30 12 階)
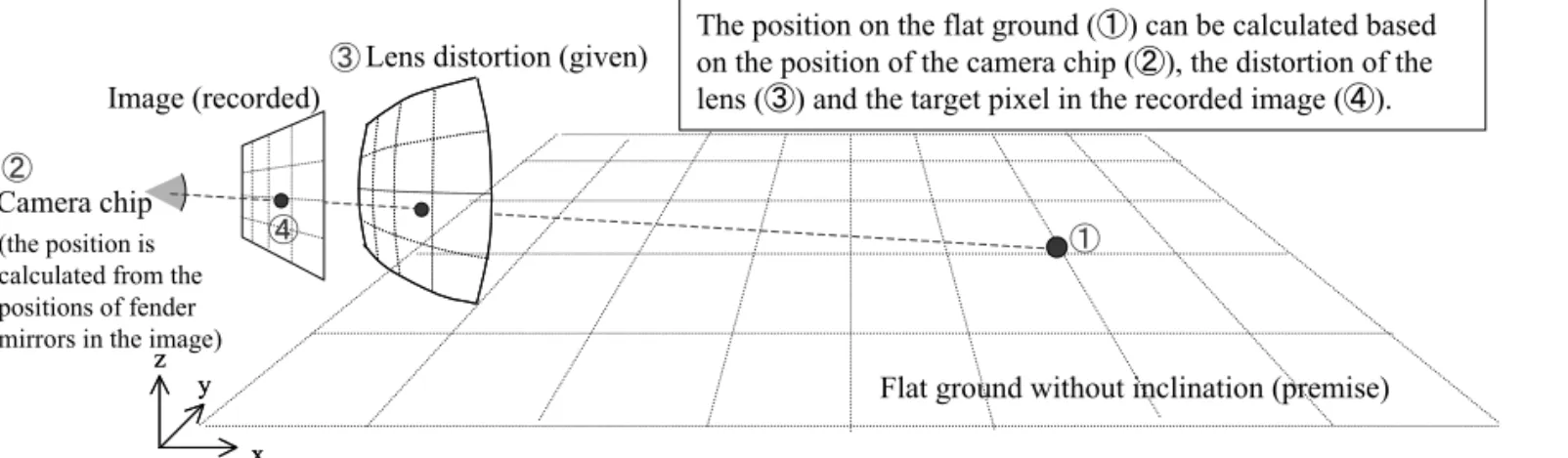
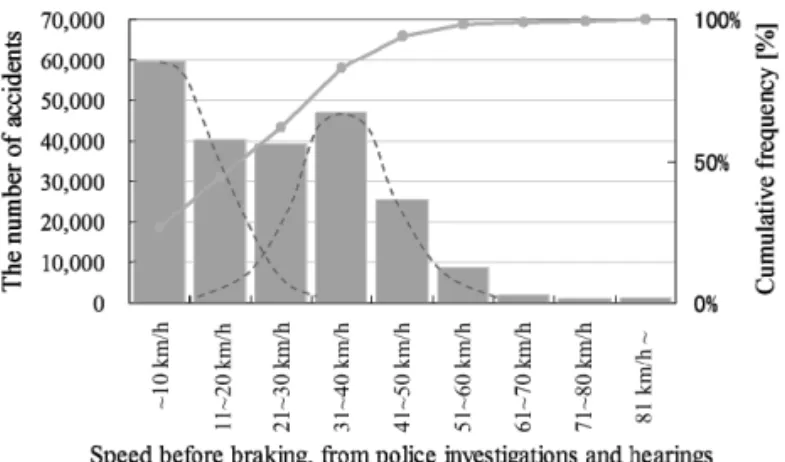
図1 に本データベースの概要を示す. 過去の研究(4-7)においては,ヒヤリハットの発生状況が事故 に類似していることが明らかとなっている.すなわち,事故 に比べて多数のデータが記録可能なヒヤリハットの発生経 緯・原因を調べることで,事故の発生経緯・原因を推定する ことが可能となり,交通事故低減のための教育や車両開発, 道路環境整備への活用が期待できる. 2.2. 記録映像からの距離計測 ヒヤリハットデータベースには,映像上の対象物までの相 対距離を,記録された映像を基に計測する補助機能がある. この機能を使用することで,たとえば追突事故における追 突車両と被追突車両の相対距離の推移を,記録映像を基に計 測することが可能となる. ただし,本研究で使用のドライブレコーダには単眼カメラ が使用されているため,ステレオ映像を基に距離計測を実施 することができない.よって,路面が完全な平坦形状且つ高 さ0 という仮定をおくことで,記録映像上の各ピクセルに対 応する路面上の位置の計測を可能とした.なお,レンズの歪 みおよびカメラの設置位置は既知であり,カメラの取付角度 は映像に記録された自車両(ドライブレコーダを搭載してい る車両)のフェンダミラー位置を基に手動で設定する手法を とっている. 図2 に本機能の概要を示す. 前述のとおり,本機能は「路面高さ0」等の前提での計算を 実施しているため,高い精度は期待できない.とはいうもの の,大量のデータを同一の手法で解析することにより,量的 データを基にした傾向を知ることが可能となる. 3.追突事故の分類 3.1. 仮説の導出と分類 図3 は,日本における追突事故の第一当事者(過失の大き い側で,一般には追突側)の危険認知速度と発生件数の関係(8) Camera chip
Image (recorded) Lens distortion (given)
Flat ground without inclination (premise) x y z x y z (the position is calculated from the positions of fender mirrors in the image)
The position on the flat ground (①) can be calculated based on the position of the camera chip (②), the distortion of the lens (③) and the target pixel in the recorded image (④).
① ②
③
④
Fig. 2 Determining the OTCAR’s relative position (assuming flat and level ground)
Fig. 1 Outline of the overall system included in the near-miss incident database
を示したグラフであり,その分布には2 つのピークが認めら れる.この特徴により,「追突事故は,低速と高速という異 なる速度領域の間に,異なるプロセスや要因が存在する」と いう仮説を立てるに至った.そして,追突事故を低速領域(速 度20 km/h 以下)と高速領域(40 km/h 以上)とに分類し,そ れぞれの領域における追突ヒヤリハット(追突しそうになっ た危険な事象)の状況を解析することとした. なお図3 より,20~40 km/h の速度領域には低速および高速 の双方の特徴が混在して認められると予想し,本研究ではこ の中間領域を除いて分析した.これにより,低速と高速の特 徴(差異)の明確化が容易になると考えられる. 3.2. 分析対象 本研究では以上の仮説の下,研究開始時(2010 年 4 月)に ヒヤリハットデータベースに登録されていた約42,000 件のデ ータ(1 カメラのデータのみ)を対象とし,急ブレーキ直前の 速度が20 km/h 以下および 40 km/h 以上の追突ヒヤリハット を抽出した.なお,ヒヤリハットのデータはすべて,データ ベース管理者によって「あとどの程度ブレーキが遅いと事故 になっていたか」という視点の下,高・中・低の危険レベル に既に分類されている.ある程度主観的な判断が含まれる情 報であり,データベース管理者(2 名)の間でその判断基準に 多少の差が生じる可能性は否定できないものの,「危険レベ ルが高い方が事故発生により近い状況であり,その特徴を把 握しやすい」と考えられる.よって本研究では,分析対象と して高レベルのヒヤリハットのみを抽出した.その結果,低 速/高速それぞれについて173/117 件ずつのヒヤリハットが 分析対象となった. 3.3. 発生要因・状況の分析 抽出したドライブレコーダの映像データをすべて閲覧し, それぞれの発生要因および状況を分類した.対象となるドラ イブレコーダのデータでは,映像が車両前方のみである等, 得られる情報が限られている.そのため,特に発生要因につ いては判断が困難である事例も認められた.よって本研究で は,要因が明確に判断できる場合のみ,その要因を決定・分 類し,不明確な場合には「不明」と分類した.また,複数の 要因が考えられる場合には,すべての要因を計上した. その結果,低速/高速それぞれの発生要因や発生状況には 次の特徴があることが明らかとなった. (1) 低速 低速の追突ヒヤリハットにおいては,高速に比べてその発生 要因の種類が極めて少なかった.具体的には,そのほとんど が「前方車両の動きの予測ミス」が要因として考えられる状 況であった.たとえば「前方車両が交差点をスムーズに右左 折,または直進すると予想したが急停止したため,自車両も 急ブレーキをかけるに至った」という状況がその代表例であ る.このようなドライバの思い込み(判断ミス)によって発 生したと考えられる状況は非常に多く,分析対象データの約 80%を占めた. (2) 高速 高速の追突ヒヤリハットの場合には,前方映像だけからでは その発生要因が「不明」な場合がほとんどであった. また発生状況としては,他車両の突然の割り込み動作を原因 とする場合の他,前車の減速・停止に伴う自車両のブレーキ タイミングが遅れた場合,ブレーキは遅れていないが走行速 度に対して車間距離が短かったために急ブレーキとなった場 合,通常の減速挙動において初期制動力が弱かったために最 終的には急ブレーキとなった場合等,多くの種類の発生状況 が認められた. 特に,「自車両の前方に他車両が割り込んできた直後に,自 車両が追突を避けるために急ブレーキをかけた」という発生 状況(割り込み追突ヒヤリハット)が,低速では極めて少な かった(2.3%)のに対し,高速では 31.6%(37 件)という高 い割合で確認された.そして,本研究においては,この点が 低速と高速の間の最も大きな発生状況の差であると考えられ た. 4.低速の追突ヒヤリハット分析 前章では,低速の追突ヒヤリハットでは,考えられる発生 要因が高速に比べて極めて少ないことが明らかとなった. 本章では,低速の追突ヒヤリハットが発生しやすい状況(= 追突事故が発生しやすいと予想される状況)をより詳細に明 らかにすることを目的とし,前方車両との相対速度,および オーバラップ率の調査を実施する. 4.1. 相対速度 2.2.節で説明した距離計測機能を使用し,低速の追突ヒヤリ ハット173 件について,自車両の前端から前方車両の後端ま での距離の推移を計測した.また,その比較対象として,低 速(衝突速度が20 km/h 以下)の追突事故データを抽出し,そ れによって抽出された16 件の低速の追突事故についても同様 に前方車両の後端部までの距離の推移を計測した. なお,衝突時の(または衝突しそうになる)状況において は前方車両と接近するため,前方車両の後端部が映像からは み出して記録されない場合がある.その場合,事故(衝突) データにおいては,時刻0(ドライブレコーダのトリガ瞬間)
Fig. 3 Speed range distribution of car-to-car rear-end
collisions in Japan in 2009 (two peaks are shown)
図1 に本データベースの概要を示す. 過去の研究(4-7)においては,ヒヤリハットの発生状況が事故 に類似していることが明らかとなっている.すなわち,事故 に比べて多数のデータが記録可能なヒヤリハットの発生経 緯・原因を調べることで,事故の発生経緯・原因を推定する ことが可能となり,交通事故低減のための教育や車両開発, 道路環境整備への活用が期待できる. 2.2. 記録映像からの距離計測 ヒヤリハットデータベースには,映像上の対象物までの相 対距離を,記録された映像を基に計測する補助機能がある. この機能を使用することで,たとえば追突事故における追 突車両と被追突車両の相対距離の推移を,記録映像を基に計 測することが可能となる. ただし,本研究で使用のドライブレコーダには単眼カメラ が使用されているため,ステレオ映像を基に距離計測を実施 することができない.よって,路面が完全な平坦形状且つ高 さ0 という仮定をおくことで,記録映像上の各ピクセルに対 応する路面上の位置の計測を可能とした.なお,レンズの歪 みおよびカメラの設置位置は既知であり,カメラの取付角度 は映像に記録された自車両(ドライブレコーダを搭載してい る車両)のフェンダミラー位置を基に手動で設定する手法を とっている. 図2 に本機能の概要を示す. 前述のとおり,本機能は「路面高さ0」等の前提での計算を 実施しているため,高い精度は期待できない.とはいうもの の,大量のデータを同一の手法で解析することにより,量的 データを基にした傾向を知ることが可能となる. 3.追突事故の分類 3.1. 仮説の導出と分類 図3 は,日本における追突事故の第一当事者(過失の大き い側で,一般には追突側)の危険認知速度と発生件数の関係(8) Camera chip
Image (recorded) Lens distortion (given)
Flat ground without inclination (premise) x y z x y z (the position is calculated from the positions of fender mirrors in the image)
The position on the flat ground (①) can be calculated based on the position of the camera chip (②), the distortion of the lens (③) and the target pixel in the recorded image (④).
① ②
③
④
Fig. 2 Determining the OTCAR’s relative position (assuming flat and level ground)
Fig. 1 Outline of the overall system included in the near-miss incident database
を示したグラフであり,その分布には2 つのピークが認めら れる.この特徴により,「追突事故は,低速と高速という異 なる速度領域の間に,異なるプロセスや要因が存在する」と いう仮説を立てるに至った.そして,追突事故を低速領域(速 度20 km/h 以下)と高速領域(40 km/h 以上)とに分類し,そ れぞれの領域における追突ヒヤリハット(追突しそうになっ た危険な事象)の状況を解析することとした. なお図3 より,20~40 km/h の速度領域には低速および高速 の双方の特徴が混在して認められると予想し,本研究ではこ の中間領域を除いて分析した.これにより,低速と高速の特 徴(差異)の明確化が容易になると考えられる. 3.2. 分析対象 本研究では以上の仮説の下,研究開始時(2010 年 4 月)に ヒヤリハットデータベースに登録されていた約42,000 件のデ ータ(1 カメラのデータのみ)を対象とし,急ブレーキ直前の 速度が20 km/h 以下および 40 km/h 以上の追突ヒヤリハット を抽出した.なお,ヒヤリハットのデータはすべて,データ ベース管理者によって「あとどの程度ブレーキが遅いと事故 になっていたか」という視点の下,高・中・低の危険レベル に既に分類されている.ある程度主観的な判断が含まれる情 報であり,データベース管理者(2 名)の間でその判断基準に 多少の差が生じる可能性は否定できないものの,「危険レベ ルが高い方が事故発生により近い状況であり,その特徴を把 握しやすい」と考えられる.よって本研究では,分析対象と して高レベルのヒヤリハットのみを抽出した.その結果,低 速/高速それぞれについて173/117 件ずつのヒヤリハットが 分析対象となった. 3.3. 発生要因・状況の分析 抽出したドライブレコーダの映像データをすべて閲覧し, それぞれの発生要因および状況を分類した.対象となるドラ イブレコーダのデータでは,映像が車両前方のみである等, 得られる情報が限られている.そのため,特に発生要因につ いては判断が困難である事例も認められた.よって本研究で は,要因が明確に判断できる場合のみ,その要因を決定・分 類し,不明確な場合には「不明」と分類した.また,複数の 要因が考えられる場合には,すべての要因を計上した. その結果,低速/高速それぞれの発生要因や発生状況には 次の特徴があることが明らかとなった. (1) 低速 低速の追突ヒヤリハットにおいては,高速に比べてその発生 要因の種類が極めて少なかった.具体的には,そのほとんど が「前方車両の動きの予測ミス」が要因として考えられる状 況であった.たとえば「前方車両が交差点をスムーズに右左 折,または直進すると予想したが急停止したため,自車両も 急ブレーキをかけるに至った」という状況がその代表例であ る.このようなドライバの思い込み(判断ミス)によって発 生したと考えられる状況は非常に多く,分析対象データの約 80%を占めた. (2) 高速 高速の追突ヒヤリハットの場合には,前方映像だけからでは その発生要因が「不明」な場合がほとんどであった. また発生状況としては,他車両の突然の割り込み動作を原因 とする場合の他,前車の減速・停止に伴う自車両のブレーキ タイミングが遅れた場合,ブレーキは遅れていないが走行速 度に対して車間距離が短かったために急ブレーキとなった場 合,通常の減速挙動において初期制動力が弱かったために最 終的には急ブレーキとなった場合等,多くの種類の発生状況 が認められた. 特に,「自車両の前方に他車両が割り込んできた直後に,自 車両が追突を避けるために急ブレーキをかけた」という発生 状況(割り込み追突ヒヤリハット)が,低速では極めて少な かった(2.3%)のに対し,高速では 31.6%(37 件)という高 い割合で確認された.そして,本研究においては,この点が 低速と高速の間の最も大きな発生状況の差であると考えられ た. 4.低速の追突ヒヤリハット分析 前章では,低速の追突ヒヤリハットでは,考えられる発生 要因が高速に比べて極めて少ないことが明らかとなった. 本章では,低速の追突ヒヤリハットが発生しやすい状況(= 追突事故が発生しやすいと予想される状況)をより詳細に明 らかにすることを目的とし,前方車両との相対速度,および オーバラップ率の調査を実施する. 4.1. 相対速度 2.2.節で説明した距離計測機能を使用し,低速の追突ヒヤリ ハット173 件について,自車両の前端から前方車両の後端ま での距離の推移を計測した.また,その比較対象として,低 速(衝突速度が20 km/h 以下)の追突事故データを抽出し,そ れによって抽出された16 件の低速の追突事故についても同様 に前方車両の後端部までの距離の推移を計測した. なお,衝突時の(または衝突しそうになる)状況において は前方車両と接近するため,前方車両の後端部が映像からは み出して記録されない場合がある.その場合,事故(衝突) データにおいては,時刻0(ドライブレコーダのトリガ瞬間)
Fig. 3 Speed range distribution of car-to-car rear-end
collisions in Japan in 2009 (two peaks are shown)
で距離が0(すなわち衝突する)であると仮定し,映像によっ て距離が計測可能であった時刻での最接近距離から,時刻0・ 距離0 の間を直線補間した.また,ヒヤリハットデータにお いては最終的には衝突していないのであるから,映像によっ て距離が計測可能であった時刻での最接近距離の状況が時刻 0 まで継続されると仮定し,その一定値をもって補完した.事 故データについては全データ(最終的には衝突しているので, 必ず前方車両の後端部が映像からはみ出す),およびヒヤリ ハットデータについては約34%のデータに補完を実施した. 低速の追突ヒヤリハット(a)および低速の追突事故(b)につい て,計測されたトリガ前1.5 秒からトリガ時までの前方車両と の相対距離の推移を図4 に示す.(時刻 0 がトリガの瞬間) そして,図 4 のデータを密度分布に置き換えたものが図 5 であり,いずれも,濃色であればあるほどその状況が高頻度 で確認されたことを意味する. 図5 の 2 つのグラフを比較すると,追突事故の密度分布(b) を0.6 秒遅らせる(グラフ上で右方向にオフセットさせる)こ とで追突ヒヤリハットの密度分布に形状および分布がほぼ一 致することが分かる(図中の点線).すなわち,この密度分 布の類似性から,低速の追突事故および追突ヒヤリハットの 相対速度に関する発生状況には類似性が認められることが分 かる. 低速追突事故が発生する可能性のある状況において,衝突 の0.6 秒前よりも前にブレーキやハンドル操作の回避操作を 実施する場合には,急操作が必要ないことからヒヤリハット として記録されない場合が多いと考えられる.一方,0.6 秒前 後の位置で危険を感じた場合にはヒヤリハットとなり,それ よりも後に気付いた場合,または全く危険に気付かなかった 場合には追突事故に至っていると考えることができる.すな わち,低速追突事故が発生する状況において,事故が発生し ない場合には,ほとんどの運転手が衝突の0.6 秒以上前にはブ レーキまたはハンドル操舵によって衝突を回避しているとい うことを意味しており,このことは低速追突事故に対しては TTC(Time To Collision)=0.6 秒時点での運転手の知覚状況が 重要であることを示唆している. 加えて,低速追突の事故およびヒヤリハットのいずれにお いても,前方車両との相対接近速度は約5.3 km/h という低速 度の頻度が高いことも確認された.すなわち,このような極 低速での追突事故発生状況を的確に把握することが,事故件 数低減のための重要な要件のひとつであることが分かる. 4.2. オーバラップ率 前節と同様に,ヒヤリハットデータベースの距離計測機能 を使用し,低速の追突ヒヤリハット173 件について,トリガ 瞬間の自車両に対する前方車両の左右方向のオーバラップ率 を計測した.加えて,映像を基にANGLED と PARALLEL と いう2 つの衝突形態に分類した(自車両と前方車両との車頭 方向の差が20 度以上と思われるデータを ANGLED,それ以 外をPARALLEL とした).この分類については主観によるも のとなるため,事前に車頭方向20 度の状況の映像を記録し, その映像を分類の実施者に対して事前に示すことで,この分 類の妥当性を高めることとした. また,前節と同様に,低速(衝突速度が20 km/h 以下)の追 突事故データ16 件についても同様にオーバラップ率の計測お よび衝突形態の分類を実施した. なお,前節と同様に前方車両の後端部が映像からはみ出し て記録されない場合は,事故・ヒヤリハット共に,映像によ って距離が計測可能であった時刻での状況が時刻0 まで継続 されると仮定し,その値を使用した.そして,2 台の車両は平 行な状態であるという前提に基づく次式によってトリガ瞬間 のオーバラップ率P0をすべてのデータに対して算出した. (1) 0 2 4 6 8 10 -1.5 -1 -0.5 0
Time [sec.] (0 sec. is a triggered moment) Dista
nce to the rear
en
d
of
the car ahe
ad [m
]
(a) Near-miss Incident (N=173)
0 2 4 6 8 10 -1.5 -1 -0.5 0
Time [sec.] (0 sec. is a triggered moment) Di
stanc e to th e rear end of th e ca r ahead [m ] (b) Accident (N=16)
Fig.4 Transition of inter-vehicle distance between the front end of subject vehicle and the rear end of forward vehicle in all recorded low-speed rear-end incidents/accidents (before the trigger)
Time [sec.] (0 sec. is a triggered moment)
Time [sec.] (0 sec. is a triggered moment) (b) Accident High Low 0.6 sec. offset 0 -0.5 -1.0 -1.5 0 -0.5 -1.0 -1.5 0 2 4 6 8 10 0 2 4 6 8 10 19.3km/h 5.3km/h
(a) Near-miss Incident
0 5 20 30 40 50 ~ [%] High Low 0 5 20 30 40 50 ~ [%] D is ta nc e to th e r ea r e nd o f th e car a head [m ] D is ta nc e to th e r ea r e nd o f th e car ah ead [m ]
Fig.5 Density distributions of the approach speeds of cars with drive recorders to cars ahead (monochrome color), and the similarity between incidents and accidents with a parallel shift of 0.6 seconds (dotted lines), based on the charts shown in Figure 4
100 2 2 D O O D O W L W W P ここで,LO:トリガ瞬間の自車両に対する前方車両のオフセ ット量(ドライブレコーダデータからの計測値)[m],WD:自 車両の車幅[m],WO:前方車両の車幅[m],であり,WDはすべ て1.7 m,WOは1.7 m(四輪車)および 0 m(二輪車)を使用 した.(図6 に計算の概要を示す.) 図7 は,低速の追突ヒヤリハット(a)および追突事故(b)に おけるタイプ別・オーバラップ率別の分布を示したものであ る. 低速の追突ヒヤリハット(a)と追突事故(b)の分布を比較す ると,追突ヒヤリハット(a)は追突事故(b)に比べて,オーバラ ップ率の低い状況が極めて多いことが分かる.すなわち,低 速の追突事故(b)において最も多い事故状況はオーバラップ率 の高い(フルラップ追突に近い)状況であるのに対し,事故 には至らないものの危険な状況である追突ヒヤリハット(a)と しては,低いオーバラップ率の状況も極めて多く発生してい ることが分かる. なお,2007 年 2 月から 2012 年 5 月にかけて富山県内の修理 工場に入庫した事故車両の中から,事故形態が追突事故(車 両の後退時に衝突が発生する「逆突事故」は除く)であると 報告された車両の損傷範囲の調査を実施した.調査機会を得 られた車両に対し,追突車のフロント部,および被追突車の リヤ部について,衝突相手に直接接触した痕跡(直接痕)の 範囲を写真により確認した.そして,車両全幅を3 等分し, それぞれの衝突部位について「[a] 左側のみに直接痕あり」 「[c] 右側のみに直接痕あり」「[b] 少なくとも中央部に直接 痕あり(左右側の直接痕の有無は問わない)」のいずれかに 分類した.ただし,損傷が軽微すぎるなどのために直接痕の 範囲の判断が困難であるデータについては除外した.それに より得られたデータ数は,フロント部475 件,リヤ部 1,324 件である. 図 8 に,その結果の分布を示す.すなわち,[a]および[c] に比べて[b]の割合が多いという結果が得られた.フルラップ (高オーバラップ率)に近い追突事故であれば車両の中央部 に損傷が生じる([b]の損傷となる)と考えられるから,この 実車調査結果からも,ヒヤリハットデータベースによる低速 追突事故の分布(図7(b))においてフルラップ(高オーバラ ップ率)の状況が多いという結果の妥当性が確認できたとい える. 以上のように,ヒヤリハットでは低オーバラップ率が多く, 事故になると高オーバラップ率の方が多くなるが,低オーバ ラップ率の場合,高オーバラップ率の状況に比べると,ブレ ーキだけではなくステアリング操作による回避が容易である. それにより,分布に差が生じたと考えられる. また図7 より,追突ヒヤリハット(a)における低オーバラッ プ率の状況では,オーバラップ率の高い状況(オーバラップ 率100%=フルラップに近い状況)に比べて ANGLED の割合 が多いことも分かる.そして,具体的な低オーバラップ率の 発生状況としては,自車両または前方車両が車線変更中の追 突事故/ヒヤリハットにはPARALLEL のケースが多く,前方 車両が右左折中にはANGLED のケースが多いことが分かっ た. 5.高速割り込み追突ヒヤリハット分析 第3 章で述べたように,割り込み追突ヒヤリハットが高速 の追突ヒヤリハットでは低速に比べて高頻度で確認された.
A car with a drive recorder
A car ahead to be rear-ended actually/imminently 100 D L O WL P Overlap percentage 2O W 2 D W O L LL [%]
* This illustration represents a left-side offset.
(Obliquity of the relative heading direction of two cars is ignored in this study.)
Fig.6 Definition of “overlap percentage”
[a] Only left [b] Include middle [c] Only right
Front (N = 475) 9.9% 78.1% 12.0% Rear (N = 1324) 6.1% 85.2% 8.7% 0.0% 50.0% 100.0% Front (N = 475) Rear (N = 1324)
Fig.8 Distributions of direct damage areas on front/rear ends
0 5 10 15 20 25 30 35 40 0-10 10-20 20-30 30-40 40-50 50-60 60-70 70-80 80-90 90-100 100-90 90-80 80-70 70-60 60-50 50-40 40-30 30-20 20-10 10-0 ANGLED PARALLEL 0 5 10 0-10 10-20 20-30 30-40 40-50 50-60 60-70 70-80 80-90 90-100 100-90 90-80 80-70 70-60 60-50 50-40 40-30 30-20 20-10 10 -0 ANGLED PARALLEL The nu m be r o f i nc ide nt s The num be r of a ccide nts Left Right Left Right Overlap percentage [%] Overlap percentage [%] (a) Near-miss Incident (N=173)
(b) Accident (N=16)
Fig.7 Frequency distributions of the overlap percentage by the relative angle classifications (ANGLED/PARALLEL) in the low speed rear-end incidents and accidents
で距離が0(すなわち衝突する)であると仮定し,映像によっ て距離が計測可能であった時刻での最接近距離から,時刻0・ 距離0 の間を直線補間した.また,ヒヤリハットデータにお いては最終的には衝突していないのであるから,映像によっ て距離が計測可能であった時刻での最接近距離の状況が時刻 0 まで継続されると仮定し,その一定値をもって補完した.事 故データについては全データ(最終的には衝突しているので, 必ず前方車両の後端部が映像からはみ出す),およびヒヤリ ハットデータについては約34%のデータに補完を実施した. 低速の追突ヒヤリハット(a)および低速の追突事故(b)につい て,計測されたトリガ前1.5 秒からトリガ時までの前方車両と の相対距離の推移を図4 に示す.(時刻 0 がトリガの瞬間) そして,図4 のデータを密度分布に置き換えたものが図 5 であり,いずれも,濃色であればあるほどその状況が高頻度 で確認されたことを意味する. 図5 の 2 つのグラフを比較すると,追突事故の密度分布(b) を0.6 秒遅らせる(グラフ上で右方向にオフセットさせる)こ とで追突ヒヤリハットの密度分布に形状および分布がほぼ一 致することが分かる(図中の点線).すなわち,この密度分 布の類似性から,低速の追突事故および追突ヒヤリハットの 相対速度に関する発生状況には類似性が認められることが分 かる. 低速追突事故が発生する可能性のある状況において,衝突 の0.6 秒前よりも前にブレーキやハンドル操作の回避操作を 実施する場合には,急操作が必要ないことからヒヤリハット として記録されない場合が多いと考えられる.一方,0.6 秒前 後の位置で危険を感じた場合にはヒヤリハットとなり,それ よりも後に気付いた場合,または全く危険に気付かなかった 場合には追突事故に至っていると考えることができる.すな わち,低速追突事故が発生する状況において,事故が発生し ない場合には,ほとんどの運転手が衝突の0.6 秒以上前にはブ レーキまたはハンドル操舵によって衝突を回避しているとい うことを意味しており,このことは低速追突事故に対しては TTC(Time To Collision)=0.6 秒時点での運転手の知覚状況が 重要であることを示唆している. 加えて,低速追突の事故およびヒヤリハットのいずれにお いても,前方車両との相対接近速度は約5.3 km/h という低速 度の頻度が高いことも確認された.すなわち,このような極 低速での追突事故発生状況を的確に把握することが,事故件 数低減のための重要な要件のひとつであることが分かる. 4.2. オーバラップ率 前節と同様に,ヒヤリハットデータベースの距離計測機能 を使用し,低速の追突ヒヤリハット173 件について,トリガ 瞬間の自車両に対する前方車両の左右方向のオーバラップ率 を計測した.加えて,映像を基にANGLED と PARALLEL と いう2 つの衝突形態に分類した(自車両と前方車両との車頭 方向の差が20 度以上と思われるデータを ANGLED,それ以 外をPARALLEL とした).この分類については主観によるも のとなるため,事前に車頭方向20 度の状況の映像を記録し, その映像を分類の実施者に対して事前に示すことで,この分 類の妥当性を高めることとした. また,前節と同様に,低速(衝突速度が20 km/h 以下)の追 突事故データ16 件についても同様にオーバラップ率の計測お よび衝突形態の分類を実施した. なお,前節と同様に前方車両の後端部が映像からはみ出し て記録されない場合は,事故・ヒヤリハット共に,映像によ って距離が計測可能であった時刻での状況が時刻0 まで継続 されると仮定し,その値を使用した.そして,2 台の車両は平 行な状態であるという前提に基づく次式によってトリガ瞬間 のオーバラップ率P0をすべてのデータに対して算出した. (1) 0 2 4 6 8 10 -1.5 -1 -0.5 0
Time [sec.] (0 sec. is a triggered moment) Dista
nce to the rear
en
d
of
the car ahe
ad [m
]
(a) Near-miss Incident (N=173)
0 2 4 6 8 10 -1.5 -1 -0.5 0
Time [sec.] (0 sec. is a triggered moment) Di
stanc e to th e rear end of th e ca r ahead [m ] (b) Accident (N=16)
Fig.4 Transition of inter-vehicle distance between the front end of subject vehicle and the rear end of forward vehicle in all recorded low-speed rear-end incidents/accidents (before the trigger)
Time [sec.] (0 sec. is a triggered moment)
Time [sec.] (0 sec. is a triggered moment) (b) Accident High Low 0.6 sec. offset 0 -0.5 -1.0 -1.5 0 -0.5 -1.0 -1.5 0 2 4 6 8 10 0 2 4 6 8 10 19.3km/h 5.3km/h
(a) Near-miss Incident
0 5 20 30 40 50 ~ [%] High Low 0 5 20 30 40 50 ~ [%] D is ta nc e to th e r ea r e nd o f th e car a head [m ] D is ta nc e to th e r ea r e nd o f th e car ah ead [m ]
Fig.5 Density distributions of the approach speeds of cars with drive recorders to cars ahead (monochrome color), and the similarity between incidents and accidents with a parallel shift of 0.6 seconds (dotted lines), based on the charts shown in Figure 4
100 2 2 D O O D O W L W W P ここで,LO:トリガ瞬間の自車両に対する前方車両のオフセ ット量(ドライブレコーダデータからの計測値)[m],WD:自 車両の車幅[m],WO:前方車両の車幅[m],であり,WDはすべ て1.7 m,WOは1.7 m(四輪車)および 0 m(二輪車)を使用 した.(図6 に計算の概要を示す.) 図7 は,低速の追突ヒヤリハット(a)および追突事故(b)に おけるタイプ別・オーバラップ率別の分布を示したものであ る. 低速の追突ヒヤリハット(a)と追突事故(b)の分布を比較す ると,追突ヒヤリハット(a)は追突事故(b)に比べて,オーバラ ップ率の低い状況が極めて多いことが分かる.すなわち,低 速の追突事故(b)において最も多い事故状況はオーバラップ率 の高い(フルラップ追突に近い)状況であるのに対し,事故 には至らないものの危険な状況である追突ヒヤリハット(a)と しては,低いオーバラップ率の状況も極めて多く発生してい ることが分かる. なお,2007 年 2 月から 2012 年 5 月にかけて富山県内の修理 工場に入庫した事故車両の中から,事故形態が追突事故(車 両の後退時に衝突が発生する「逆突事故」は除く)であると 報告された車両の損傷範囲の調査を実施した.調査機会を得 られた車両に対し,追突車のフロント部,および被追突車の リヤ部について,衝突相手に直接接触した痕跡(直接痕)の 範囲を写真により確認した.そして,車両全幅を3 等分し, それぞれの衝突部位について「[a] 左側のみに直接痕あり」 「[c] 右側のみに直接痕あり」「[b] 少なくとも中央部に直接 痕あり(左右側の直接痕の有無は問わない)」のいずれかに 分類した.ただし,損傷が軽微すぎるなどのために直接痕の 範囲の判断が困難であるデータについては除外した.それに より得られたデータ数は,フロント部 475 件,リヤ部 1,324 件である. 図 8 に,その結果の分布を示す.すなわち,[a]および[c] に比べて[b]の割合が多いという結果が得られた.フルラップ (高オーバラップ率)に近い追突事故であれば車両の中央部 に損傷が生じる([b]の損傷となる)と考えられるから,この 実車調査結果からも,ヒヤリハットデータベースによる低速 追突事故の分布(図7(b))においてフルラップ(高オーバラ ップ率)の状況が多いという結果の妥当性が確認できたとい える. 以上のように,ヒヤリハットでは低オーバラップ率が多く, 事故になると高オーバラップ率の方が多くなるが,低オーバ ラップ率の場合,高オーバラップ率の状況に比べると,ブレ ーキだけではなくステアリング操作による回避が容易である. それにより,分布に差が生じたと考えられる. また図7 より,追突ヒヤリハット(a)における低オーバラッ プ率の状況では,オーバラップ率の高い状況(オーバラップ 率100%=フルラップに近い状況)に比べて ANGLED の割合 が多いことも分かる.そして,具体的な低オーバラップ率の 発生状況としては,自車両または前方車両が車線変更中の追 突事故/ヒヤリハットにはPARALLEL のケースが多く,前方 車両が右左折中にはANGLED のケースが多いことが分かっ た. 5.高速割り込み追突ヒヤリハット分析 第3 章で述べたように,割り込み追突ヒヤリハットが高速 の追突ヒヤリハットでは低速に比べて高頻度で確認された.
A car with a drive recorder
A car ahead to be rear-ended actually/imminently 100 D L O WL P Overlap percentage 2O W 2 D W O L LL [%]
* This illustration represents a left-side offset.
(Obliquity of the relative heading direction of two cars is ignored in this study.)
Fig.6 Definition of “overlap percentage”
[a] Only left [b] Include middle [c] Only right
Front (N = 475) 9.9% 78.1% 12.0% Rear (N = 1324) 6.1% 85.2% 8.7% 0.0% 50.0% 100.0% Front (N = 475) Rear (N = 1324)
Fig.8 Distributions of direct damage areas on front/rear ends
0 5 10 15 20 25 30 35 40 0-10 10-20 20-30 30-40 40-50 50-60 60-70 70-80 80-90 90-100 100-90 90-80 80-70 70-60 60-50 50-40 40-30 30-20 20-10 10-0 ANGLED PARALLEL 0 5 10 0-10 10-20 20-30 30-40 40-50 50-60 60-70 70-80 80-90 90-100 100-90 90-80 80-70 70-60 60-50 50-40 40-30 30-20 20-10 10 -0 ANGLED PARALLEL The nu m be r o f i nc ide nt s The num be r of a ccide nts Left Right Left Right Overlap percentage [%] Overlap percentage [%] (a) Near-miss Incident (N=173)
(b) Accident (N=16)
Fig.7 Frequency distributions of the overlap percentage by the relative angle classifications (ANGLED/PARALLEL) in the low speed rear-end incidents and accidents
本章では,そのような高速での割り込み追突ヒヤリハット の特徴をより詳細に明らかにすることを目的とした解析を実 施する. 5.1. 左右の相違 高速の割り込み追突ヒヤリハットに注目し,自車両に対す る他車両の接近状況(相対位置の推移)を計測した.計測に は前述のヒヤリハットデータベースの距離計測機能を使用し た.割り込み追突ヒヤリハット37 件についての,他車両の自 車両に対する相対位置(前後x 軸,左右 y 軸)の推移(ドラ イブレコーダのトリガ前3 秒からトリガ後 1 秒までの 4 秒間 の推移)を,図9 のグラフに示す.この図より,左側からの 割り込みの場合には,ほぼすべての事例においてグラフの左 上から自車両の位置まで直線状に他車両が接近している.一 方,右側からの割り込みの場合には,左側の場合と同様に(グ ラフの右上から自車両の位置まで)直線状に他車両が接近し ている場合もあれば,4 秒間にわたって自車両との距離が10 m 以内で近い場所に位置し続けている場合もあるなど,多様な 状況がみられる. 以上のように,高速の割り込み追突ヒヤリハットでは,他 車両が割り込んでくる左右方向の違いによって,その状況に 明らかな差異が認められた. 5.2. 相対接近速度 次に,左右それぞれの割り込み追突ヒヤリハットについて, その接近状況を定量的に明らかとすることを試みる. 自車両の車両前後方向に関する他車両との相対距離の推移 を,時間軸を横軸としてグラフ化し,ドライブレコーダの記 録トリガの直前2 秒間の平均相対速度(グラフの傾き)から, ブレーキを掛けていなかった場合を仮定してトリガ以降を直 線近似で描きなおす.そして,その場合に衝突する瞬間を時 刻0(仮想の衝突瞬間)とする.この場合,仮想の衝突瞬間と 実際のトリガ瞬間の時間差は,トリガ瞬間におけるTTC(Time To Collision)に相当する.それらのグラフの時刻 0 を一致さ せて重ね合わせ,左右それぞれで密度分布化したものを図10 に示す.(L)が左から,(R)が右からの割り込み追突ヒヤリハッ トであり,横軸は時間(0 秒が仮想の衝突瞬間),縦軸が x 軸 方向の相対距離を示している.色が濃いほどデータ件数が多 いことを意味している. これらのグラフより,左側からの割り込みによる場合には, 約20 km/h の相対速度で接近する場合が非常に多いのに対し, 右側からの場合には5~30 km/h と,その相対速度は広範囲に わたることを確認できる. 6.結 言 追突事故の特徴を明らかにすることを目的とし,ヒヤリハ ットデータベースに登録された低速(急ブレーキ直前の速度 が20 km/h 以下),および高速(40 km/h 以上)の追突ヒヤリ ハットをそれぞれ173 件,117 件分析した.その結果,以下の 知見が得られた. (1) 低速と高速の間では,その発生要因に差が認められる (1-1) 高速に比べて,低速では発生要因の種類が極めて少 なく,低速では前方車両の動きの予測ミスがほとんど (1-2) 高速は要因が不明なものが多く,発生状況も多様 (2) 低速の追突ヒヤリハットには次の特徴がある (2-1) 相手車両との相対速度が約 5 km/h と極めて低い場 合が多く,衝突の0.6 秒前の時点での回避操作有無が 事故発生有無に対して重要 (2-2) オーバラップ率の低い状況での発生頻度が高い.一 方,実際の事故としてはフルラップの状況が多い (3) 高速の追突ヒヤリハットには次の特徴がある (3-1) 高速では自車両の前方に他車両が割り込んで追突し そうになる「割り込み追突ヒヤリハット」の割合が低 速に比べて多い (3-2) 他車両が割り込んできた方向を左右で比較すると, 左側からの割り込みの場合にはほぼすべての事例で直 線状に自車両に接近してくるのに対し,右側からの場 合には多様な状況が認められ,明らかな左右差が存在 Fig.10 Monochrome color means density distributions of the
approaching speeds of surrounding cars from each side in case of collision after the cut-in event and the red lines indicate highly frequent approaching speeds
Drive Recorder Relative Position y x y x 10 5 0 5 10
Fig.9 Four-second transition (from 3 seconds before to 1 second after the triggers) of the relative position to forward vehicle in cases of rear-end near-miss incidents after cut-in events
する (3-3) その接近状況を定量的に計測したところ,左からの 場合は相対速度20 km/h の頻度が高いのに対し,右側 からの場合には5~30 km/h と広範囲にわたる 交通事故件数の低減のためには,人(運転手,歩行者等の 教育),車(自動車の安全性能の向上),環境(道路環境の 改善)という,交通環境を構成する要素すべての方向からの アプローチが必要であることには疑いの余地はなく,以上の ような「事故に至る状況」を明らかにしていくことにより, それら人・車・環境すべての分野での応用が期待できる. 本報で得られた知見が交通事故件数の低減に役立つことを 期待する. 参 考 文 献 (1) 平成 26 年中の交通事故の発生状況,警察庁交通局 (2015). (2) 自動車保険データにみる交通事故の経済的損失の状況 (2012 年 4 月~2013 年 3 月),社団法人日本損害保険協 会 (2014).
(3) Euro NCAP:Euro NCAP to drive availability of Autonomous Emergency Braking systems for safer cars in Europe, Euro NCAP, http://www.euroncap.com/en/press-media/press-releases/euro-nca p-to-drive-availability-of-autonomous-emergency-braking-system s-for-safer-cars-in-europe/,(参照 2013.07.10). (4) 永井正夫:ドライブレコーダ・データベースの現状と活用 可能性:自動車技術Vol.67, No.2, p47-53 (2013). (5) 永井正夫,鎌田実,茂呂克己:ドライブレコーダ DB 登録 と活用の現状,「交通安全にどこまで貢献できるか,ドラ イブレコーダ」,自動車技術会フォーラムテキスト No.09FORUM-13,p31-40(2009). (6) 藤田光伸,道辻洋平,小竹元基,鎌田実,永井正夫:ドラ イブレコーダを用いたヒヤリハット分析に関する研究(第 2 報)~収集データによる分析手法とデータベースの構築 ~,自動車技術会論文集Vol.38, No.4, p.145-150 (2007). (7) 永井正夫,鎌田実,道辻洋平,藤田光伸,小竹元基:ドラ イブレコーダ活用によるヒヤリハット研究,自動車技術 Vol.60, No.12, p.51-58 (2006). (8) 交通事故統計データ(オーダーメード),公益財団法人交 通事故総合分析センター(2011).
本章では,そのような高速での割り込み追突ヒヤリハット の特徴をより詳細に明らかにすることを目的とした解析を実 施する. 5.1. 左右の相違 高速の割り込み追突ヒヤリハットに注目し,自車両に対す る他車両の接近状況(相対位置の推移)を計測した.計測に は前述のヒヤリハットデータベースの距離計測機能を使用し た.割り込み追突ヒヤリハット37 件についての,他車両の自 車両に対する相対位置(前後x 軸,左右 y 軸)の推移(ドラ イブレコーダのトリガ前3 秒からトリガ後 1 秒までの 4 秒間 の推移)を,図9 のグラフに示す.この図より,左側からの 割り込みの場合には,ほぼすべての事例においてグラフの左 上から自車両の位置まで直線状に他車両が接近している.一 方,右側からの割り込みの場合には,左側の場合と同様に(グ ラフの右上から自車両の位置まで)直線状に他車両が接近し ている場合もあれば,4 秒間にわたって自車両との距離が10 m 以内で近い場所に位置し続けている場合もあるなど,多様な 状況がみられる. 以上のように,高速の割り込み追突ヒヤリハットでは,他 車両が割り込んでくる左右方向の違いによって,その状況に 明らかな差異が認められた. 5.2. 相対接近速度 次に,左右それぞれの割り込み追突ヒヤリハットについて, その接近状況を定量的に明らかとすることを試みる. 自車両の車両前後方向に関する他車両との相対距離の推移 を,時間軸を横軸としてグラフ化し,ドライブレコーダの記 録トリガの直前2 秒間の平均相対速度(グラフの傾き)から, ブレーキを掛けていなかった場合を仮定してトリガ以降を直 線近似で描きなおす.そして,その場合に衝突する瞬間を時 刻0(仮想の衝突瞬間)とする.この場合,仮想の衝突瞬間と 実際のトリガ瞬間の時間差は,トリガ瞬間におけるTTC(Time To Collision)に相当する.それらのグラフの時刻 0 を一致さ せて重ね合わせ,左右それぞれで密度分布化したものを図10 に示す.(L)が左から,(R)が右からの割り込み追突ヒヤリハッ トであり,横軸は時間(0 秒が仮想の衝突瞬間),縦軸が x 軸 方向の相対距離を示している.色が濃いほどデータ件数が多 いことを意味している. これらのグラフより,左側からの割り込みによる場合には, 約20 km/h の相対速度で接近する場合が非常に多いのに対し, 右側からの場合には5~30 km/h と,その相対速度は広範囲に わたることを確認できる. 6.結 言 追突事故の特徴を明らかにすることを目的とし,ヒヤリハ ットデータベースに登録された低速(急ブレーキ直前の速度 が20 km/h 以下),および高速(40 km/h 以上)の追突ヒヤリ ハットをそれぞれ173 件,117 件分析した.その結果,以下の 知見が得られた. (1) 低速と高速の間では,その発生要因に差が認められる (1-1) 高速に比べて,低速では発生要因の種類が極めて少 なく,低速では前方車両の動きの予測ミスがほとんど (1-2) 高速は要因が不明なものが多く,発生状況も多様 (2) 低速の追突ヒヤリハットには次の特徴がある (2-1) 相手車両との相対速度が約 5 km/h と極めて低い場 合が多く,衝突の0.6 秒前の時点での回避操作有無が 事故発生有無に対して重要 (2-2) オーバラップ率の低い状況での発生頻度が高い.一 方,実際の事故としてはフルラップの状況が多い (3) 高速の追突ヒヤリハットには次の特徴がある (3-1) 高速では自車両の前方に他車両が割り込んで追突し そうになる「割り込み追突ヒヤリハット」の割合が低 速に比べて多い (3-2) 他車両が割り込んできた方向を左右で比較すると, 左側からの割り込みの場合にはほぼすべての事例で直 線状に自車両に接近してくるのに対し,右側からの場 合には多様な状況が認められ,明らかな左右差が存在 Fig.10 Monochrome color means density distributions of the
approaching speeds of surrounding cars from each side in case of collision after the cut-in event and the red lines indicate highly frequent approaching speeds
Drive Recorder Relative Position y x yx 10 5 0 5 10
Fig.9 Four-second transition (from 3 seconds before to 1 second after the triggers) of the relative position to forward vehicle in cases of rear-end near-miss incidents after cut-in events
する (3-3) その接近状況を定量的に計測したところ,左からの 場合は相対速度20 km/h の頻度が高いのに対し,右側 からの場合には5~30 km/h と広範囲にわたる 交通事故件数の低減のためには,人(運転手,歩行者等の 教育),車(自動車の安全性能の向上),環境(道路環境の 改善)という,交通環境を構成する要素すべての方向からの アプローチが必要であることには疑いの余地はなく,以上の ような「事故に至る状況」を明らかにしていくことにより, それら人・車・環境すべての分野での応用が期待できる. 本報で得られた知見が交通事故件数の低減に役立つことを 期待する. 参 考 文 献 (1) 平成 26 年中の交通事故の発生状況,警察庁交通局 (2015). (2) 自動車保険データにみる交通事故の経済的損失の状況 (2012 年 4 月~2013 年 3 月),社団法人日本損害保険協 会 (2014).
(3) Euro NCAP:Euro NCAP to drive availability of Autonomous Emergency Braking systems for safer cars in Europe, Euro NCAP, http://www.euroncap.com/en/press-media/press-releases/euro-nca p-to-drive-availability-of-autonomous-emergency-braking-system s-for-safer-cars-in-europe/,(参照 2013.07.10). (4) 永井正夫:ドライブレコーダ・データベースの現状と活用 可能性:自動車技術Vol.67, No.2, p47-53 (2013). (5) 永井正夫,鎌田実,茂呂克己:ドライブレコーダ DB 登録 と活用の現状,「交通安全にどこまで貢献できるか,ドラ イブレコーダ」,自動車技術会フォーラムテキスト No.09FORUM-13,p31-40(2009). (6) 藤田光伸,道辻洋平,小竹元基,鎌田実,永井正夫:ドラ イブレコーダを用いたヒヤリハット分析に関する研究(第 2 報)~収集データによる分析手法とデータベースの構築 ~,自動車技術会論文集Vol.38, No.4, p.145-150 (2007). (7) 永井正夫,鎌田実,道辻洋平,藤田光伸,小竹元基:ドラ イブレコーダ活用によるヒヤリハット研究,自動車技術 Vol.60, No.12, p.51-58 (2006). (8) 交通事故統計データ(オーダーメード),公益財団法人交 通事故総合分析センター(2011).