ユーザフィードバックへの適応メカニズムを組み込んだ
モバイルデスクトップ作業支援システムの実装
Implementation of Mobile Desktop Work Support System
incorporating Adaptation Mechanism to User Feedback
齋藤 晴紀
1∗高橋 良暢
2栗原 聡
1,2,3Haruki Saito
1, Yoshinobu Takahashi
2, and Satoshi Kurihara
1,2,3 1電気通信大学大学院情報システム学研究科
1
Graduate School of Information Systems, The University of Electro-Communications
2電気通信大学大学院情報理工学研究科
2
Graduate School of Informatics and Engineering, The University of Electro-Communications
3人工知能先端研究センター
3
Artificial Intelligence eXploration Research Center
Abstract: 近年,環境または人に対して能動的にインタラクションを行うアンビエントの研究に注 目が集まっている.本論は,オフィスの PC を用いたデスクトップ作業に着目し,作業環境の快適性 向上を目的として研究を行っている.デスクトップ作業では,PC のウィンドウの配置動作,机上物 品の取り出しや片付けは,作業者に煩わしさを感じさせ,作業効率の低下,作業時間の増大を招く. 我々は PC のウィンドウや机上物品を自律行動可能なエージェントとして扱い,ユーザによる配置動 作の低減を図る.これまで,今回新たに,モバイル化とユーザフィードバックへの適応メカニズムを 実装し, 適用範囲の拡大とインタラクションの精度向上を評価実験にて評価した.
1
序論
近年,情報処理技術の進歩,センサデバイスや通信 機器の小型化,低価格化によって,IoT(Internet of Things[1])技術を駆使したデバイスの普及が進んでい る.IoT とは,実環境に存在する様々なモノに通信機 能を付加することで,インターネットへの接続やモノ 同士の相互通信が可能とし,モノ自身が自動的に認識 や制御などを行う技術のことである.こうした,技術 の進歩を背景として,環境や個別の人に応じてインタ ラクションを行うアンビエント研究に注目が集まって いる.アンビエント研究の多くは,空調や BGM,照 明などを操作することによって,省エネやユーザの生 活空間の快適性向上やを目指すものが多い [2][3][4].た だ,現代社会において,人は仕事や趣味,勉強などの 作業を行っている.そこで,アンビエント技術の適用 視野を広げ,室内空間全体の快適性向だけでなく,ア ンビエントによる作業支援行い,作業環境そのものの 快適性向上も重要な課題のひとつである. 本研究では,室内空間で行われる作業のうち,現代 ∗連絡先:所属機関 電気通信大学大学院情報システム学研究科 住所 〒 182-8585 東京都調布市調布ヶ丘 1‐ 5‐ 1 E-mail [email protected],is.uec.ac.jp のオフィス環境において増加している PC を用いた机 上作業に着目する.PC を用いた机上作業で人は,作 業目的に応じて PC のアプリケーションウィンドウや 机上物品の配置動作を行うつまり,ユーザは.ウィン ドウや机上物品の配置動作をあらかじめ行い,作業目 的に応じた作業環境を構築することによって,作業の 効率化や時間短縮を図っている.しかしながら,PC の ウィンドウや机上物品のの再配置動作は本来の作業目 的とは異なる前準備である.再配置動作は,日々繰り 返し行われる作業においてユーザに煩わしさを感じさ せる.また,再配置にかかかる時間が蓄積することで 時間的損失が増加する恐れがある. 繰り返し行われる作業において,その配置動作や時間 的損失を低減する研究として藤田ら [6] や兒島ら [7] が提 唱するインタラクティブデスクトップ作業支援システム (AIDE:Autonomouse Intaractive Desk Environment)が挙げられる.AIDE では,PC 上のウィンドウや机上 物品を自立行動可能なエージェントとして扱うことで, ユーザに代わって作業内容に応じて再配置動作を行う. 事前に取得するユーザの作業履歴データから,作業ご との特徴を抽出する.抽出結果とリアルタイムのセン シングデータを照合することで作業内容を判断し,再 配置動作を AIDE が行うことを通じて作業支援を行う.
富士たらや兒島らは AIDE システムを実装し評価実験 によってその有用性を確かめている..しかしながら, 既存の AIDE 研究では利用範囲の拡大を目指したとき, いくつかの解決すべき課題が存在している,まず,作 業内容を分類する際,人手による分類を必要とする点 である.人手による,ユーザに負担の増加する恐れが ある.次に,既存システムでは,デスクトップ型 PC での作業を想定してシステムが構成されている点であ る.モバイル型 PC も多く用いられるようになったオ フィスへの適用が難しく,適用範囲の拡大に課題が残 る.最後に,AIDE が行う再配置動作がユーザに対し て一方的な作業支援で終わっている点である.作業支 援動作が,現ユーザの現作業にとって妥当であるかが 不明瞭となっている. そこで,本論では既存の AIDE で明確化した課題を 解決するべく新たに「AIDE Mk-II(Mark-II)」を提案 する.AIDE Mk-II では,非不値行列因子分解(NMF: Non-negative Matrix Factorization)[5] を作業分類に 適応し,作業分類の自動化を図る.また,AIDE の構 成要素を再編し,改良を加えノート型 PC,Web カメ ラ,ロボットアームのみで様々な環境に対応する.最 後に,AIDE が作業支援を行った後の,ユーザリアク ションをセンシングすることでインタラクションの精 度向上を図る.以上の提案手法を AIDE Mk-II にて実 装し,評価実験によってその有効性の確認を行った.
2
関連研究
作業支援を目的としたインタラクションシステムの 研究として,安藤ら [8] の研究が挙げられる.安藤らは, 工場で行われるセル生産システムに着目し研究を行っ ている.セル生産システムとは,一人,あるいは少数 の作業者が製品の組立作業を完成まで行う生産方式で ある.安藤らは,複数の複数の小型物品搬送ロボット を用いて作業に使う物品の運び出し,収納を通じて支 援を行う「Attentive Workbench (AWB)図 2[9]」の 構築を目指している.AWB では,カメラによって作業 者や作業状況の情報を取得し,取得情報からプロジェ クタによる情報提示や,自走式トレイによる物品の搬 送が行われる.AWB に関し,安藤らは卓上の限られた 作業空間に密集するトレイ群から物品を迅速に絞り込 む手法を提案している.提案手法では,まず,作業者の 指差し動作に応じて,物品を運ぶ小型物品搬送ロボッ トがリアクション動作をとる.次に,ロボットのリア クション動作によって候補となる複数の物品を提示し, それに応じた作業者がさらに物品を指差しによって絞 り込むリアクションをとる.ロボットのリアクション を用いることで作業者の意図推定を行っており,人と システムの相互作用,「インタラクション」によって作図 1: Attentive Workbench (AWB)の概観 [9]
業環境が構築している. オフィス環境の一つである会議室におけるアンビエ ントのインタラクションシステムの研究例を述べる.大 山ら [10] によって,人の配置や表示コンテンツによっ てディスプレイ自体が自律的に移動・変形する「自律型 可変ディスプレイ」が提案されている.大山らは,実際 に壁型ディスプレイがどのように使われているか調査 し,ユーザが使用するディスプレイ形状にはいくつか のパターンが存在することを示した.そのパターンに したがって,ディスプレイが表示コンテンツと周辺の 空間配置という二つのトリガによってインタラクショ ンを起こす.インタラクションが自然に行えているか, 作業内容にどんな影響をもたらすか,といった検証ま では行われていないものの,デザインスタディの結果 から,人々は作業に合ったディスプレイの形状を求め ていることを明らかにし,アンビエント情報基盤が作 業空間へ取り入れられることの有用性を示している.
3
AIDE: Autonomouse
Interac-tive Desk Environment
インタラクティブデスクトップ作業支援システム「AIDE (Autonomous Interactive Desk Environment)」とは,
PC 上のアプリケーションウィンドウや机上の実物体を 「自律可能なエージェント(自律エージェント)」とし て扱うことで,作業支援を行い作業の効率化を試みて いる.具体的には,システム自身が作業者が行おうと している作業を予測し,ウィンドウや実物体が自律的 に適切な配置場所へと移動することでより快適な作業 環境を迅速に構築するインタラクションを行う.AIDE の概観図を??に示す.AIDE では,作業者が PC 作業 を通常通り行えるように作業者の正面にメインディス
プレイを配置している.その他に,机部分にもタッチ 式ディスプレイを配置しており,ディスプレイ上に表 示されるアプリケーションウィンドウと書類や本,メ モなどの実物体の見比べが容易となるように構築して いる.さらに,実物体の自律的な移動を可能にするた めに,Web カメラとロボットアームを設置している. Web カメラは机全体を俯瞰できるように設置してあり, 実物体の名前と場所の情報を取得するために用いられ, 取得した情報をもとにロボットアームを用いて実物体 を把持し,移動を行う動作を想定している.また,作 業者のジェスチャーによってインタラクションを行う ことを想定し,作業者の動作認識が可能な Kinect を使 用している. AIDE がユーザに対して作業支援を行うためには,あ らかじめユーザの作業情報を取得する必要がある.つ まり,事前に作業履歴から各作業目的に応じてよく使 用する PC ウィンドウや作業物品の配置の特徴を抽出 したうえで,リアルタイムセンシングのデータと抽出 した特徴量の比較結果に応じて,作業支援インタラク ションを実行しなくてはならない. 兒島ら [7] は,PC のウィンドウの位置,大きさ,表 示階層などの情報に対し,作業が切り替わる条件を詳 細に設定して作業の切り分けを行っている.さらに,切 り分けた作業に対して k-means 法による分類手法を用 いている.k-means 法は事前に分類数を決定する必要 がある.しかし,事前に作業分類数を知ることは困難 であるため,人手でクラスタリング内容を見ながら,ク ラスタ数を変化させ,複数回クラスタリングを行い,最 適だと思われるクラスタ数を決定する. インタラクション実行時においても,PC のウィンド ウの位置,大きさ,表示階層などの情報に対し,作業 が切り替わりを判断する条件を設定し,作業支援を行 う.AIDE の実装した主観評価の実験において良好な 結果を結果を残しているものの,作業を予測判断の結 果が間違っていた場合,作業支援の内容の修正は行わ れず,間違った作業が繰り返し行われる.また,作業 ごとのユーザの配置の趣向が変わっても,作業支援の 内容が修正されることはない.
4
提案手法
AIDE Mk-II
(
Mark-II
)
多様化するオフィスのデスクトップ環境では,デス クトップ型 PC だけでなくノート型 PC も多く用いら れるようになってきている.従って,既存の AIDE で は,固定式のため現在の多様化されたオフィスのデス クトップ環境に対応できない.また,既存の実装手法 ではデータ解析を行うとき,タスク分類の結果を人の 手で確認し調整する必要が生じる.作業分類を逐次人 図 2: AIDE の概観図 手で確認することは利用者の負担増加につながる恐れ があり,モバイル化を行う際にそのまま既存手法を適 応することはできない.さらに,既存の AIDE のシス テムでは,作業内容に合わせて適切なインタラクショ ンが実行されているかどうかの判断が行われておらず, 一方的な動作でインタラクションが終わっている.そ のため,システムと人とで相互のインタラクションが 実行されているかは疑問が残る.そこで,AIDE Mk-II ではモバイル化と新たなクラスタリング手法の検討を 行った上で,システムの流れを改良し,システムがユー ザのリアクションセンシングを行い,データ解析にセ ンシング結果をフィードバックすることでより適切な インタラクションの創出を目指す.4.1
AIDE のモバイル化
モバイル化に向けての提案手法を述べていく.本節 では,モバイル化に向けて AIDEMark-II で改善すべ き点をハードウェア面とソフトウェア面に分けて考え, それぞれについて説明していく. 4.1.1 ハードウェア面の改良 まず,ハードウェア面について考えていく.AIDE の 主なハードウェアの構成要素は,主な作業環境である 「PC」,机上の物品を動かすための「ロボットアーム」, 机上の物品を観測するための「カメラ」の 3 つである. 既存の AIDE では PC はデスクトップ型のみ対応して いたが,多様なオフィス環境において,AIDE Mk-II で はノート型 PC にも対応していく必要がある.ノート 型 PC も用いられるようになると,画面のサイズが場 合によって大きく異なる.画面サイズの変化に伴う対 応は,主に仮想環境の画面領域,ウィンドウサイズが 異なることが問題となるためソフトウェア面で対応し ていくことする.ロボットアームについては,既存システムではロボッ トアームが左右一つずつ,2 機用意され,作業者の両 側から物品の出し入れに関する支援を行っていた.モ バイル化することを考えたとき,2 機もロボットアー ムがあることは持ち運びの際に荷物となり不便である. そこで,ロボットアームは持ち運びが可能で,可動域 が広いロボットアーム 1 機を採用する.ロボットアー ムは,ユーザの左または右側に設置し,物理的な作業 支援を行う. モバイル化するに当たって,カメラが計測すべき物 体の位置やカメラ自身の位置は,デスクトップ環境毎 に異なる.この問題に対処するため,AIDE Mark-II で は,カメラの画角内に作業領域,非作業領域,ロボッ トアームが収まるように設置するだけで相対的に配置 を取得できるようにする(図 3).作業領域とは,作業 者が作業を行うときに用いるスペースのことで,右利 きと左利きで異なるがおよそ作業者の手元付近の領域 となる.非作業領域とは,作業者から見て作業領域の さらに外側の領域のことであり,物品の収納スペース として扱う.作業領域と非作業領は,図 3 の赤枠のよ うにマーカー(Point)を用いて,緑線のような境界線 図を引く. マーカーは,ユーザが作業環境に応じて自ら設定で きるようになっている.また,ロボットアームは画角 内でキャリブレーション動作を起こすことで,ロボッ トアームが持つ座標とカメラで取得する座標を相互に 変換できるようにし,使用する PC や場所などの環境 が変化しても適切なインタラクションを行えるように する.AIDE Mk-II で想定している作業環境において, ロボットアームとカメラ,机,作業物品の位置はカメ ラの画角内で比較的近い位置に存在するため,平面的 なキャリブレーションを行う.ロボットアームのハン ドを動作範囲の原点とロボットアームから見て動作範 囲内の左上端点の二点に移動させ,ロボットアームが 持つ座標情報とカメラが記録した座標情報が同じ値に なるように座標変換を行う.本研究で構成した AIDE Mk-II の概観を図 4 に示す. 4.1.2 ソフトウェア面の改良 オブジェクトエージェントのデータ取得は作業者の 環境によって座標位置が変化する.したがって,既存手 法のように使用する際の位置の座標や普段から収納さ れている位置の座標をある環境で記録しても,異なる 環境ではカメラやロボットアームなどの位置が変化す るためそのままの座標を使用することはできない.そ こで,物品の座標位置を記録するのではなく,使用の 有無を先ほど設定した作業領域と被作業領域に割り当 て二値(0,1)で記録する.作業領域に物品がある場合 は使用していると見なして「1」を記録し,被作業領域 図 3: 作業領域と非作業領域 図 4: AIDE Mk-II の概観図 に物品がある場合は使用していないと見なして「0」を 記録する.二値で記録することによって,次節で説明 する非負値行列因子分解(NMF:Non-negative Matrix Factrization)を利用した作業クラスタリングが行える 利点がある.オブジェクトエージェントのインタラク ション時にユーザが設定した作業領域の境界線を基に 二値を設定し,物品の出し入れに関するインタラクショ ンを行う. ウィンドウのログ情報もユーザが使用する PC の画 面サイズによって変化するが,PC の画面領域に関する 情報は実物体に比べて比較的容易で正確に取得できる. そのため,ログデータ取得時に PC の画面サイズデー タを取得し記録することとインタラクション時の動作 を改良することで対応する. インタラクションフェーズにて PC の画面サイズを 取得し,ログデータと現在の PC の画面サイズを比較 する.現在の PC の画面サイズとの比較結果がログデー タの PC の画面サイズと異なる場合,PC の画面サイ
ズの縦と横の比に応じてアプリケーションウィンドウ を等倍,等縮する.作業の主役,メインウィンドウと なるウィンドウについては,ウィンドウサイズが小さ くなりすぎないように工夫を施す. AIDE Mark-II を起動するプログラムが実行された 後,画面サイズの取得を行い,ログデータ収集時の画 面サイズと,現作業環境の画面サイズを比較する.も し画面サイズが小さくなっていた場合,現在の画面の 縦横比とログデータ取得時の画面の縦横比をそれぞれ 求める.さらに,縦の比を 1 としたときのそれぞれの 横の比を求める.横の比を現在の画面とログデータ取 得時の画面サイズで比較し,横の比の縮小率の逆数を 掛け,幅を大きく表示するようにする.
4.2
NMF を用いた作業クラスタリング
自動的に作業を分類するために,本研究では非負値 行列因子分解(NMF:Non-negative Matrix Factoriza-tion)を用いて作業分類を行う.NMF とは,0 または 正の値を持つ行列を解析する手法のひとつである.0 ま たは正の値を持つ行列に表現することが可能であれば, データの種類によらず解析が可能であるとされている ??.NMF の解析によって得られる結果は,行列として 表現したデータ中に存在するいくつかの頻出パターン である.NMF を用いて得られる解析結果,表現行列中 に存在する頻出パターンに基づいて,信号が分類され たり,データの要素がクラスタリングされるので,推 薦システムなどより上位のタスクで解析結果の利用が できる. 本研究では,ログデータを NMF を用いて解析でき る形に変換し,ソフトクラスタリングを実行する.ロ グデータは,アプリケーション名,アプリケーション ウィンドウの配置情報,物品名,物品の座標などが時 刻データとともにテキストデータとして記録されてい る.このテキストデータを時系列で並べ,アプリケー ションウィンドウと作業物品の使用状況が表現可能な 非負値の行列にできれば,NMF のアルゴリズムを適用 し,ログデータ中の頻出する作業パターンを抽出でき る.以下の手順で NMF を用いてログデータの解析を 行っていく. (1) ウィンドウ環境と実環境のログデータの取得 (2) ログデータから作業情報を非負値行列に変換 (3) NMF を用いた作業タスクのクラスタリング (1) ウィンドウ環境と実環境のログデータの取得 ユーザの作業履歴からアプリケーションウィンドウ に関する情報と作業物品(オブジェクト)に関する情 報を取得する.アプリケーションウィンドウに関して 取得する情報は,「年月日,時刻,ウィンドウタイトル, ウィンドウ各辺の座標」の 5 項目である.ウィンドウの ログデータ中のウィンドウタイトルから既存の AIDE と同様にアプリケーション名を抽出し,ウィンドウクラ スとして記録していく.ウィンドウログはテキストデー タとして保存する.オブジェクトに関して取得する情 報は,「年月日,時刻,オブジェクト名,オブジェクトの 座標」の 4 項目である.オブジェクト名は QPToolKit を使って設定した ID のことである.オブジェクトログ もテキストデータとして保存する.ログデータは,1 分 間隔で記録し,テキストファイルとして保存する.記 録間隔を 1 分としたのは,人が作業を切り替えるとき, ウィンドウや実物体を一つずつ移動して次の作業環境 を構築するので,作業と作業の間にはある程度の時間 的間隔が存在し,作業の切り替えのノイズを低減する 為である.また,取得間隔を延ばすことで記録データ が膨大になることを防ぐ目的もある. (2) ログデータから作業情報を非負値行列に変換 NMF は非負値行列しか解析することができないた め,テキストデータとして保存されるログデータを変 換していく必要がある.ログデータのテキストデータ はカンマ「,」と改行で区切られているため csv ファイ ルに変換できるようになっている.解析のため,テキ ストデータを csv ファイルに変換してからログデータ をもとに非負値行列を作成していく. 年月日データや時刻データとともに使用したウィン ドウやオブジェクトを記録しているので,年月日デー タと時刻データを統合して年月日と時刻データに基付 き,別々に保存されているウィンドウログとオブジェク トログを統合し時系列で並べ替える.並べ替えを行っ た後,行列の行に時間情報を列にウィンドウ情報やオ ブジェクト情報を設定し,使用の有無を二値に変換し て非負値行列を作成する. (3) NMF を用いた作業タスクのクラスタリング 二値変換をしたログデータをもとに,NMF を用いた 作業タスクのクラスタリングを行う.NMF を用いると きに,事前に決定する基底の数は設定せずに,最小化 された距離を観測し,その距離が飽和するまで基底の 数を増加させる手法をとる. NMF はソフトクラスタリングの一種で,どの作業タ スクにも存在するウィンドウやオブジェクトもそれぞ れの因子に分解される.本研究の場合,因子はタスク クラスタ,要素はウィンドウクラスとオブジェクト名 に相当する.また,作業内でメインに使われるウィンドウやオブジェクトは各因子においての特徴量として 数値表現されるため,数値が大きければ大きいほど因 子の特徴をあらわす要素となる.したがって,クラス タ内で特徴となるウィンドウクラスやオブジェクト名 が数値化されているので,最も高い特徴量を持つウィ ンドウクラとして抽出することができる. 本研究の手法では,座標情報を落として解析してい るため,タスククラスタデータに対して再び座標情報 を付加する必要がある.座標情報の付加は,NMF 後の 時間を要素の持つ因子行列(図 6)をもとに行う.時間 を要素に持つ因子行列(図 6)は各時間に含まれるクラ スターの特徴量が表現されている.たとえば,クラス ター番号 1 のタスククラスタの特徴量は 2:18 から 2:23 までの間に良く含まれ,2:18 が最も高い特徴量となっ ている.各タスククラスタにおいて最も高い特徴量の 時刻をもとに,csv ファイルを参照し,タスククラスタ データの項目に応じて座標情報を付加していく.ウィ ンドウクラスの場合は,ウィンドウの各辺の 4 つ座標 を付加するが,オブジェクトエージェントは使用の有 無を二値で付加していく.クラスター番号 1 のタスク クラスタデータを例にすると,時間に関する NMF の 解析結果から,2:18 が最も特徴量が高いと判断できる. 最も高い特長量を持つ時刻 2:18 をもとにログデータの csv ファイルを検索し,Explorer,Winlogger,Google, LINE,CPU メータの座標情報を取得し,タスククラ スタデータに付加する.
4.3
ユーザフィードバックへの適応メカニズ
ム
インタラクションの妥当性を検証するために,AIDE Mk-II がインタラクションを行った後にユーザのリア クションをシステムが観測する「リアクションタイム」 を設ける.リアクションタイムでは,AIDE Mk-II が 行ったインタラクションとユーザが行ったインタラク ションをどう修正したかを観測する.インタラクショ ンとリアクションの間にはユーザが考え判断するタイ ムラグが生じるため,ユーザのリアクションを検出す るには,十分にリアクションタイムを確保する必要が ある.事前に行った調査からおよそ 1 分以内でリアク ションが完了することが分かったので,本研究におい ては,リアクションタイムを 1 分と設定する. リアクションタイム内で,ユーザが AIDE Mark-II の 行ったインタラクションを変化させなかった場合,ユー ザは AIDE Mark-II が行ったインタラクションを妥当 なインタラクションだと感じ作業を継続したと判断す る.ユーザが AIDE Mark-II の行ったインタラクショ ンを変化させた場合,AIDE Mark-II が行ったインタ ラクションを自分の意図とは異なるインタラクション 図 5: NMF 後のウィンドウクラスとオブジェクト名を 要素に持つ因子行列 図 6: NMF 後の時間を要素の持つ因子行列 を行ったと判断する.AIDE Mark-II は,ユーザの意 図と異なるインタラクションを行ったとき,提示した インタラクションを修正する必要がある.タスククラ スタデータをもとにインタラクションを実行するので, ユーザのリアクションデータを取得しタスククラスタ データを更新することで対応する. 提示したインタラクションの内容と 1 分後の作業情 報を比較し,提示したインタラクションが正しかった かどうかを判定する.判定結果によって,AIDE Mk-II はユーザのフィードバックに適応していく.ウィンド ウや作業物品の変化が無かった場合は,インタラクショ ンが適切であったと判断し,今後も同様のインタラク ションを行う.提示したウィンドウや作業物品の作業情 報のみが異なっていた場合は,インタラクションのも とになったクラスタ中の各ウィンドウや作業物品の座 標情報を更新する.メインウィンドウが変わらず,ウィ ンドウや作業物品の追加や削除が行われている場合は, インタラクションのもとになったクラスタ中のウィン ドウや作業物品の追加や削除を行い,追加するエージェ ントの座標はフィードバック時の座標とする.メイン ウィンドウが変化しており,ウィンドウや作業物品の表 1: AIDE Mark-II のオブジェクトログデータ 実際に使った 実際に使ってない 使うと予測 1 → 1 1 → 0 使わないと予測 0 → 1 0 → 0 追加や削除が行われている場合は,メインウィンドウ が同じとなるクラスタを検索し検索結果が存在すれば, そのクラスタ情報を更新する.存在しなければ,現在 の作業情報を新たなタスクとして,タスククラスタに 追加する. さらに,AIDE Mark-II がユーザに対してインタラク ションを行えなかったときも,ユーザのフィードバック に適応する.ウィンドウがアクティブになったにもかか わらず,提示できるインタラクションがなかった場合, 1 分後にユーザのフィードバックを取得する.フィード バック時の現ウィンドウを含む作業履歴から生成され たタスククラスタ内で検索する.一致度が高いタスク クラスタがある場合は,フィードバック時の情報と比 較作業を行い,タスククラスタ中の座標の更新や追加, 削除を行う.存在しなかった場合,新たなクラスタと して追加する. オブジェクトデータの座標位置の更新については,表 1 のように使用の有無を表現する二値を更新する.
5
評価実験
3 名の被験者の協力の下,デスクトップ型 PC を用い て 1 時間で決められたタスクを 6 つ行って貰い,デー タを取得した.各実験においては,同一の被験者で行っ た.クラスタリングの検出精度の検証とエージェント の動作評価を行った後,得られた結果を基に,モバイ ル環境で設定するタスクとフィードバックへの適応メ カニズムの評価実験で使うタスクを設定した.5.1
エージェントの動作評価実験
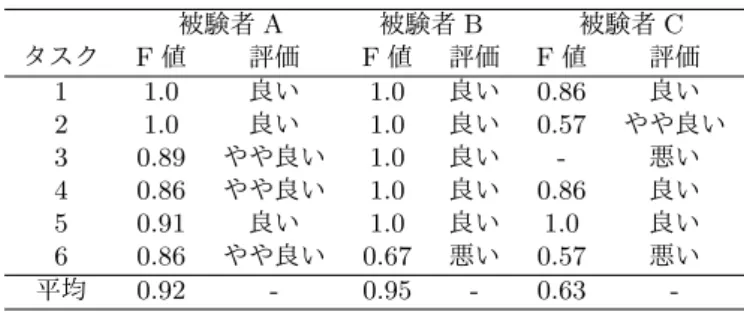
決められたタスクの構成要素に対する生成されたタ スククラスタの精度を F-尺度を用いて検証した.さら に,生成されたタスククラスタを用いて動作評価を行っ た.評価実験では,デスクトップ型 PC を用いて被験 者にタスクで使用するウィンドウや物品を含め全ての ウィンドウと物品を出鱈目な位置に置いてもらった.そ して,AIDE Mark-II を起動し,各タスクでメインウィ ンドウとなるウィンドウをアクティブにして,再配置 動作が上手く行われるかどうかを評価した. 表 2: クラスタリングの F 値と動作評価 被験者A 被験者B 被験者C タスク F値 評価 F値 評価 F値 評価 1 1.0 良い 1.0 良い 0.86 良い 2 1.0 良い 1.0 良い 0.57 やや良い 3 0.89 やや良い 1.0 良い - 悪い 4 0.86 やや良い 1.0 良い 0.86 良い 5 0.91 良い 1.0 良い 1.0 良い 6 0.86 やや良い 0.67 悪い 0.57 悪い 平均 0.92 - 0.95 - 0.63 -表 3: モバイル環境下での被験者 B の動作評価結果 被験者B 被験者C タスク デスクトップ モバイル デスクトップ モバイル 1 良い やや良い 良い やや良い 2 良い やや良い - -3 良い やや良い - -4 良い 良い 良い 良い 5 良い 良い 良い やや良い 動作評価に関しては,タスク毎の動作結果に対して, 「良い,やや良い,やや悪い,悪い」の尺度で評価して もらった.評価基準は,そのままタスクを始められる ときは「良い」,多少の調整の後,スムーズにタスクを 始められるときは「やや良い」,タスクを始めるのに手 間取るときは「やや悪い」,見当違いな動作をしたと きは「悪い」とした.F 値と動作評価を表 2 に示す.5.2
モバイル環境下での動作の評価
F-尺度と動作評価の結果が良かったタスクをモバイ ル環境の評価実験で用いて,エージェント動作の評価 の変化を確認した.先ほどのエージェント動作の評価 実験と同様に,AIDE Mark-II 起動後に,出鱈目に配 置したウィンドウなどが,メインウィンドウをアクティ ブにしたとき適切に再配置されるか評価した.評価基 準は先ほどの実験と同様に設定した.ノート PC を用 いたモバイル環境で,AIDE Mark-II を動作させたと きの評価結果を表 4 に示す.スペースの都合上,被験 者 B と被験者 C のみの結果のみ載せる. F-尺度と動作評価の結果が良かったタスクをモバイ ル環境の評価実験で用いて,エージェント動作の評価 の変化を確認した.先ほどのエージェント動作の評価 実験と同様に,AIDE Mark-II 起動後に,出鱈目に配 置したウィンドウなどが,メインウィンドウをアクティ ブにしたとき適切に再配置されるか評価した.評価基 準は先ほどの実験と同様に設定した.ノート PC を用 いたモバイル環境で,AIDE Mark-II を動作させたと表 4: モバイル環境下での被験者 B の動作評価結果 被験者B 被験者C タスク デスクトップ モバイル デスクトップ モバイル 1 良い やや良い 良い やや良い 2 良い やや良い - -3 良い やや良い - -4 良い 良い 良い 良い 5 良い 良い 良い やや良い 表 5: エージェント動作評価結果 被験者A 被験者B 被験者C フィードバック フィードバック フィードバック タスク なし あり なし あり なし あり 3 - - - - 悪い 良い 4 やや良い 良い - - - -6 やや良い 良い 悪い 良い 悪い 良い きの評価結果を表 4 に示す.スペースの都合上,被験 者 B と被験者 C のみの結果のみ載せる.
5.3
ユーザフィードバックへの適応の評価
F-尺度と動作評価の結果が悪かったタスクを用いて, エージェント動作がユーザフィードバックによって改 善されたかを確認した.デスクトップ環境で,これま での実験と同様に,AIDE Mark-II 起動した後に,メ インウィンドウをアクティブにして再配置動作に対す る評価を行った.評価結果を表 5 に示す.6
考察
NMF を用いた作業クラスタリングの精度評価では, F 値の平均が 2 被験者で 9 割以上を示したが,1 被験 者で約 6 割となった.タスクの分類がおよそ出来てい るが,精度向上のための改善が必要である.作業時間 が短いタスクの検出に問題があったと考えられる.モ バイル環境での動作評価では,デスクトップ環境に比 べ,やや評価が下がったが,作業がスムーズに行われ ていた.画面領域に応じてウィンドウが小さくなって しまうことが要因と考えられる.ユーザフィードバッ ク適応後のエージェントの動作評価では,全てのタス クで改善が見られた.ただ,メインウィンドウが同じ でサブウィンドウが異なる場合などに対応できず,更 なる改良が必要と考える.7
結論
本研究では,既存の AIDE を拡張した AIDE Mk-II を提案し, 評価した.AIDE Mark-II にて,ユーザの 作業分類に NMF を用いることで,クラスタリングの 自動化と簡易化を図った.モバイル化においては,ロ ボットの位置補正動作やウィンドウサイズの変換等の 対策を講じて対応した.さらに,ユーザの応答を観測 し,観測結果からタスククラスタを更新することによ るユーザフィードバックへの適応メカニズムを構築し, インタラクションの精度を向上させた.今度の課題と しては,座標情報を含むクラスタリング手法の適用や モバイル環境でのユーザフィードバックへの適応,画 像認識技術の導入などが挙げられる.
参考文献
[1] Kevin Aston,”That ‘Internet ofThings’ ”,RFID Journal,Vol.22,pp.1,(2009) [2] 西山高史,中島了治,”アンビエントインテリジェンス技 術の住宅分野への応用の動向 ”,人工知能学会誌,Vol.. 28,No.2,pp.230-237,(2013) [3] 青木茂樹,大西正輝,小島篤博, 福永邦雄,”独居高齢 者の行動パターンに注目した非日常状態の検出 ”,電気 学会論文誌E (センサ・マイクロマシン部門誌),Vol. 125,No.6,pp.259-265,(2015)
[4] Le Guilly and T.Smedegerd,J.Pedersen,T,Skou
”To do and not to do: constrained scenarios for safe smart house. In Intelligent Environments (IE)”2015 International Conference on IEEE,pp.17-24(,2015)
[5] D.D.Lee and H.S.Seung,”Learning the parts of objects by non-negative matrix factorization”, Na-ture,Vol.401,No,6755,pp.788-791,(1999) [6] 藤田真康,諏訪博彦,篠田孝祐,栗原聡,”インタラク ティブデスクトップ作業支援システム ”AIDE ”におけ るウィンドウエージェントの構築と評価 ”,2015年度 人工知能学会全国大会論文集,pp.1-4,2015 [7] 兒島健三郎,栗原聡,”デスクトップ作業タスクの分類 化とタスク予測に基づくアンビエントな作業支援シス テムの提案 ”,2016年度人工知能学会,2016 [8] 安藤啓祐,加藤龍,中村達弘,杉正夫.”小型物品搬送 ロボットを用いた卓上作業支援システムにおけるロボッ トのリアクションを用いたユーザ意図推定手法 ”, 精 密工学会学術講演会講演論文集2015年度精密工学会春 季大会,pp.949-950(2015)
[9] M.Sugi,I.Matsumura,Y.Tamura,M.Nikaido,
J.Ota,T.Arai,K.Kotani, K.Takamasu,
H.Suzuki,A.Yamamoto,Y.Sato,S.Shin,
F.Kimura,”Attentive Workbench” Supporting Workers in Cell Production, Journal of Robotics and Mechatronics,Vol.21,No,1, pp.135-145.(2009)
[10] 大山貴史,浅利勇,高嶋和毅,”自律移動・変形する壁
型ディスプレイの設計と評価 ”,情報処理学会,pp .
[11] 幸島匡宏,松林達史,澤田宏,”複合データ分析技術と
NTF (1)複合データ分析技術とその発展 ”,電子情報
![図 1: Attentive Workbench (AWB)の概観 [9]](https://thumb-ap.123doks.com/thumbv2/123deta/8251429.1284685/2.892.462.808.124.383/図1AttentiveWorkbenchAWBの概観9.webp)