博士論文
一流 110m ハードル走選手のインターバル走およびハードリング動作に関する
バイオメカニクス的研究
平成 26 年度
筑波大学大学院 人間総合科学研究科 体育科学専攻
柴山 一仁
i 目 次 博士論文に関連する業績一覧 … ⅵ 表のタイトル一覧 … ⅷ 図のタイトル一覧 … ⅸ 第 1 章 緒言 … 1 1.1 研究の背景 … 1 1.1.1 ハードル走について … 1 1.1.2 日本における 110mH 走の現状と課題 … 2 1.1.3 110mH 走のトレーニング法 … 5 1.2 本研究の目的 … 6 1.3 研究課題 … 6 1.4 本研究の仮定 … 6 1.5 本研究の限界 … 7 第 2 章 文献研究 … 8 2.1 110mH 走のレース分析に関する研究 … 8 2.2 110mH 走動作に関する研究 … 9 2.2.1 ハードリング動作に関する研究 … 9 2.2.2 インターバル走動作に関する研究 … 12 2.2.3 1 サイクル動作に関する研究 … 13 2.3 ハードル走のトレーニングに関する研究 … 15
ii 第 3 章 方法 … 17 3.1 データ収集 … 17 3.1.1 競技会におけるデータ収集 … 17 3.1.1.1 分析対象者 … 17 3.1.1.2 VTR 撮影 … 17 3.1.2 トレーニング実験におけるデータ収集 … 21 3.1.2.1 被験者 … 21 3.1.2.2 トレーニング … 24 3.1.2.3 VTR 撮影 … 26 3.2 データ処理 … 26 3.2.1 競技会におけるデータ処理 … 26 3.2.1.1 実座標の算出 … 26 3.2.1.2 レース分析 … 30 3.2.2 トレーニング実験におけるデータ処理 … 30 3.2.2.1 実座標の算出 … 30 3.3 局面分け … 31 3.4 算出項目 … 31 3.4.1 キネマティクス的項目 … 31 3.4.2 キネティクス的項目 … 37 第 4 章 一流ハードル走選手のインターバル走動作に関する 2 次元キネマティクス的特徴 … 40 4.1 目的 … 40 4.2 方法 … 40
iii 4.3 結果 … 41 4.3.1 独立変数間の相関行列 … 41 4.3.2 レース分析 … 41 4.3.3 基礎パラメータ … 46 4.3.3.1 身体重心速度 … 46 4.3.3.2 身体重心高 … 46 4.3.3.3 ストライド,ピッチ … 46 4.3.3.4 支持および滞空時間 … 50 4.3.3.5 身体重心鉛直速度,4 歩目における水平速度の減速量 … 50 4.3.3.6 4-off から 2-on までの各支持期および滞空期時間の割合 … 56 4.3.4 下肢のキネマティクス … 56 4.3.4.1 リード脚の動作 … 56 4.3.4.2 踏切脚の動作 … 56 4.4 考察 … 62 4.4.1 本研究の分析区間について … 62 4.4.2 各歩のキネマティクス的特徴 … 63 4.4.2.1 2 歩目(支持脚:踏切脚) … 63 4.4.2.2 3 歩目(支持脚:リード脚) … 64 4.4.2.3 4 歩目(支持脚:踏切脚) … 65 4.4.2.4 1 歩目(支持脚:リード脚) … 66 4.4.3 1 サイクル動作の特徴 … 68 4.5 要約 … 68
iv 第 5 章 一流ハードル走選手のハードリング動作に関する 3 次元バイオメカニクス的特徴 … 70 5.1 目的 … 70 5.2 方法 … 70 5.3 結果 … 71 5.3.1 各局面の所要時間 … 71 5.3.2 ハードリング動作のキネマティクス … 71 5.3.2.1 踏切脚の動作 … 71 5.3.2.2 リード脚の動作 … 75 5.3.3 ハードリング動作における各身体グループの角運動量 … 75 5.3.3.1 X 軸(左右軸)まわりの角運動量 … 89 5.3.3.2 Y 軸(進行方向軸)まわりの角運動量 … 90 5.3.3.3 Z 軸(鉛直軸)まわりの角運動量 … 91 5.4 考察 … 92 5.4.1 角運動量からみたハードリング動作 … 92 5.4.2 各局面における特徴 … 93 5.4.2.1 踏切脚支持期 … 93 5.4.2.2 滞空期 … 94 5.4.2.2.1 滞空期前半 … 95 5.4.2.2.2 滞空期後半 … 96 5.4.2.2.3 滞空期の動作に疾走速度が及ぼす影響 … 97 5.4.2.3 リード脚支持期 … 102 5.4.3 疾走速度とハードリング動作の関係 … 103 5.5 要約 … 104
v 第 6 章 ハードル走のパフォーマンス向上のためのトレーニング手段に関するキネマティ クス的研究 … 105 6.1 目的 … 105 6.2 方法 … 106 6.3 結果 … 107 6.3.1 トレーニング前後の所要時間の変化 … 107 6.3.2 トレーニング前後の疾走速度の変化 … 107 6.3.3 トレーニング前後の動作の変化 … 111 6.3.4 4 歩目滞空期におけるトレーニング前後の身体各部の角運動量の変化 … 117 6.4 考察 … 117 6.4.1 ハードル間の距離を短縮したトレーニングの効果 … 117 6.4.2 ハードル間の距離を伸長したトレーニングの効果 … 126 6.4.3 アプローチ区間の距離を伸長したトレーニングの効果 … 127 6.5 要約 … 134 第 7 章 結論 … 135 7.1 一流 110m ハードル走選手の 1 サイクル動作と疾走速度の関係 … 135 7.2 110m ハードル走の競技力向上に有効なトレーニング法 … 136 7.3 今後の課題 … 136 謝辞 … 138 文献 … 139
vi 博士論文に関係する業績一覧 Ⅰ.論文 1) 柴山一仁,藤井範久,阿江通良:一流 110m ハードル走選手の 1 サイクル動作に関す るキネマティクス的研究:疾走速度および脚長と動作の関連から.体育学研究 56(1), 75-88,2011.(査読あり) 2) 柴山一仁,藤井範久,阿江通良:一流 110m ハードル走選手のハードリング動作に関 するバイオメカニクス的分析:角運動量保存則からの検討.体育学研究 58(1),135-149, 2013.(査読あり) 3) 柴山一仁,藤井範久,門野洋介,阿江通良:国内外 110m ハードル走選手のハードリ ング動作に関する 3 次元キネマティクス的研究.陸上競技学会誌 12,45-53,2014. (査読あり) Ⅱ.学会発表 1) 柴山一仁,藤井範久,阿江通良:パフォーマンスレベル別に見た 110m ハードル走に 関するバイオメカニクス的研究.第 58 回日本体育学会(神戸大学),2007 年 9 月 5-7 日.
2) K. Shibayama, N. Fujii, and M. Ae: The Kinematical analysis of 110m hurdles. The 26th International Conference on Biomechanics in Sports (Seoul University). July 14-18, 2008. 3) 柴山一仁,藤井範久,阿江通良,門野洋介:世界一流競技者の 110m ハードル走技術
の比較―キネマティクス的特徴による検討―.第 20 回日本バイオメカニクス学会大 会(仙台大学),2008 年 8 月 26-28 日.
vii
世界一流競技者から学生競技者までを対象に―.第 59 回日本体育学会(早稲田大学), 2008 年 9 月 9-12 日.
5) K. Shibayama, N. Fujii, and M. Ae: Kinematical analysis of 110m hurdles –Focusing on the step length-. The 27th International Conference on Biomechanics in Sports (University of Limerick). August 17-21, 2009. 6) 柴山一仁,藤井範久,阿江通良:ハードリング動作における股関節の 3 次元キネマテ ィクス的研究.第 60 回日本体育学会(広島大学),2009 年 8 月 26-28 日. 7) 柴山一仁,藤井範久,阿江通良:一流 110m ハードル走選手のハードリング動作にお ける関節トルクの変化パターン.第 21 回日本バイオメカニクス学会大会(国士舘大 学),2010 年 8 月 28-30 日. 8) 柴山一仁,藤井範久,阿江通良:一流 110m ハードル走選手のハードリング動作にお ける角運動量の変化パターン.第 61 回日本体育学会(中京大学),2010 年 9 月 8-10 日.
9) K. Shibayama, N. Fujii, S. Takenaka, S. Tanigawa and M. Ae: A case study on ground reaction forces in sprint hurdles. The 29th International Conference on Biomechanics in Sports (University of Porto). June 27-July 1, 2011.
10) K. Shibayama, N. Fujii, Y. Shimizu, and M. Ae: The analysis of angular momentum in hurdling for world and Japanese elite sprint hurdlers. The 30th International Conference on Biomechanics in Sports (Australian Catholic University). July 2-6, 2012.
viii
表のタイトル一覧
Table 3-1 Characteristics of the subjects for videotaping. … 19 Table 3-2 Competitions videotaped. … 20 Table 3-3 Characteristics of the subjects for the training experiment. … 23 Table 4-1 Correlation matrix of the running velocity and leg length . … 42 Table 4-2 Effects of the running velocity and leg length on the step length and step
frequency. … 49
Table 4-3 Effects of the running velocity and leg length on durations of support and
airborne phases. … 52
Table 4-4 Effects of the running velocity and leg length on the vertical velocities of CG at the landing and takeoff in each step. … 53 Table 4-5 Effects of the running velocity and leg length on change in horizontal velocity of
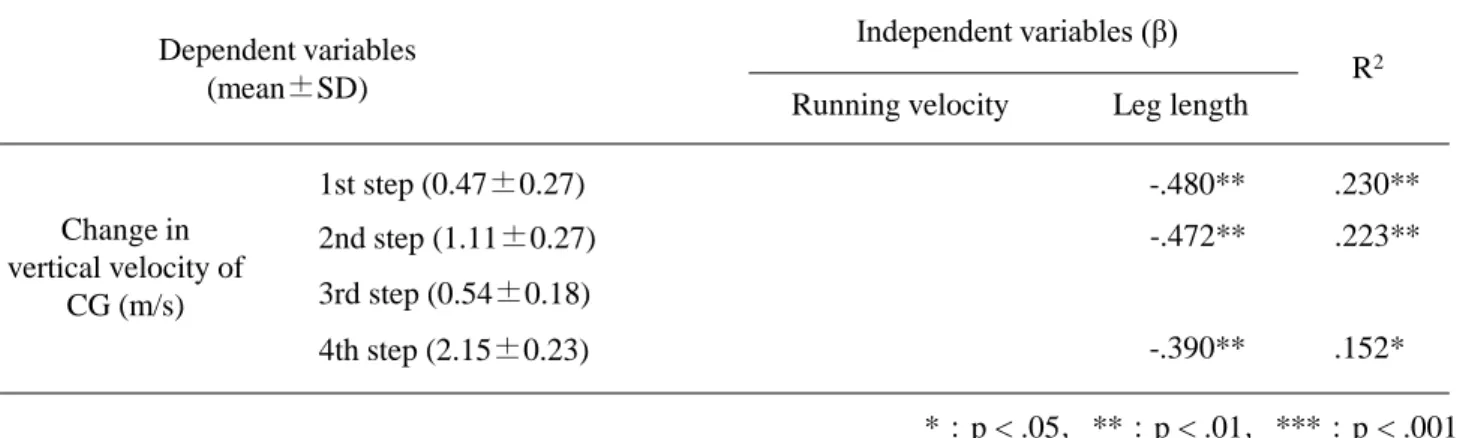
CG during each step. … 54 Table 4-6 Effects of the running velocity and leg length on change in vertical velocity of
CG during each step. … 55 Table 6-1 Durations of the four-step hurdle cycle motion, support phases and airborne
phases at each training. … 108 Table 6-2 Step frequencies of the four-step hurdle cycle motion at each training. … 109 Table 6-3 Step lengths of the four-step hurdle cycle motion at each training. … 110 Table 6-4 Horizontal velocities of CG in the four-step hurdle cycle motion at each training.
… 113
Table 6-5 Vertical velocities of CG in the four-step hurdle cycle motion at each training. … 114
ix
図のタイトル一覧
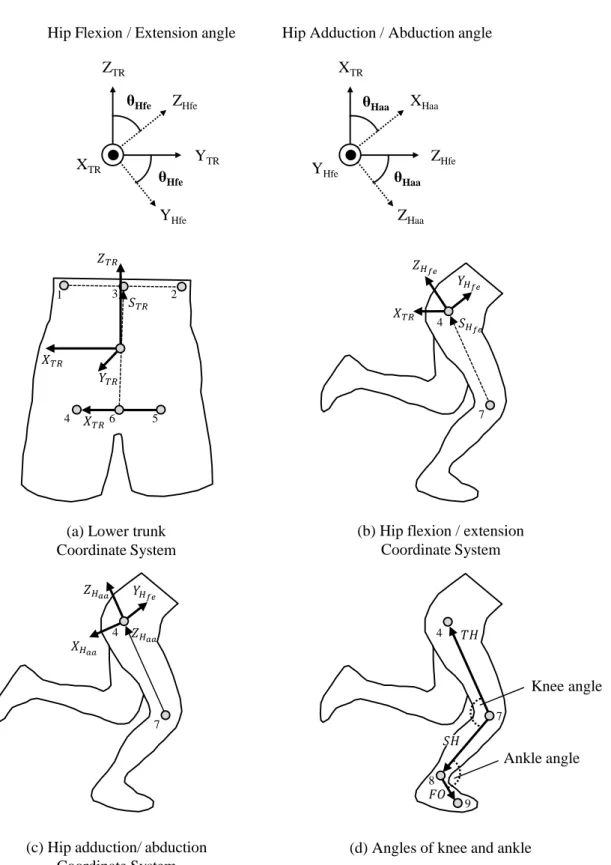
Figure 3-1 Research problems and data collection. … 18 Figure 3-2 Camera setting for competitions. … 22 Figure 3-3 Training protocols for each subject. … 25 Figure 3-4 Set-up for the training. … 27 Figure 3-5 Digitizing points of the body. … 28 Figure 3-6 Motion phases during four-step hurdle cycle. … 32 Figure 3-7 Definitions of the segment angles during interval running. … 34 Figure 3-8 Definitions of coordinate system fixed at the lower trunk and hip joint to
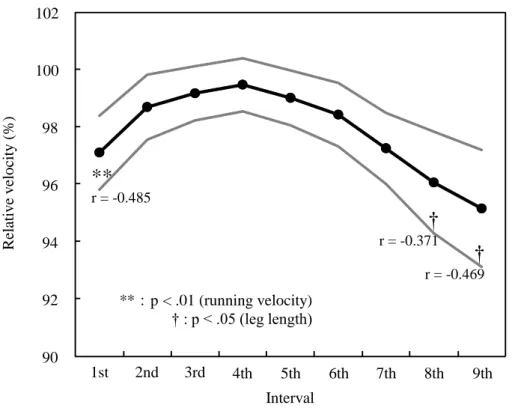
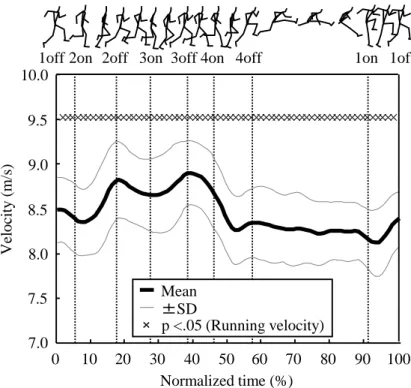
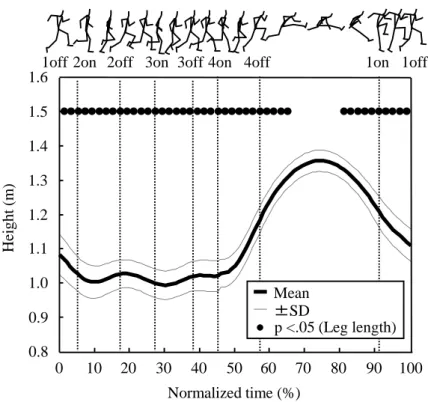
calculate the joint angle of hip. And definitions of joint angles of knee and ankle. … 36 Figure 3-9 Definition for grouping of the body parts. … 38 Figure 4-1 Relationship between running velocity and leg length. … 43 Figure 4-2 Change in velocity of the analyzed races. … 44 Figure 4-3 Change in relative velocity from the 1st to 9th interval. … 45 Figure 4-4 Change in horizontal velocity of CG during four-step hurdle cycle. … 47 Figure 4-5 Change in vertical displacement of CG during four-step hurdle cycle. … 48 Figure 4-6 Relationship between step length at the 3rd step and average horizontal velocity
and leg length. … 51
Figure 4-7 Relationship between leg length and the ratio of durations of airborne phase at the 4th step, support phase at the 1st step and airborne phase at the 1st step.
x
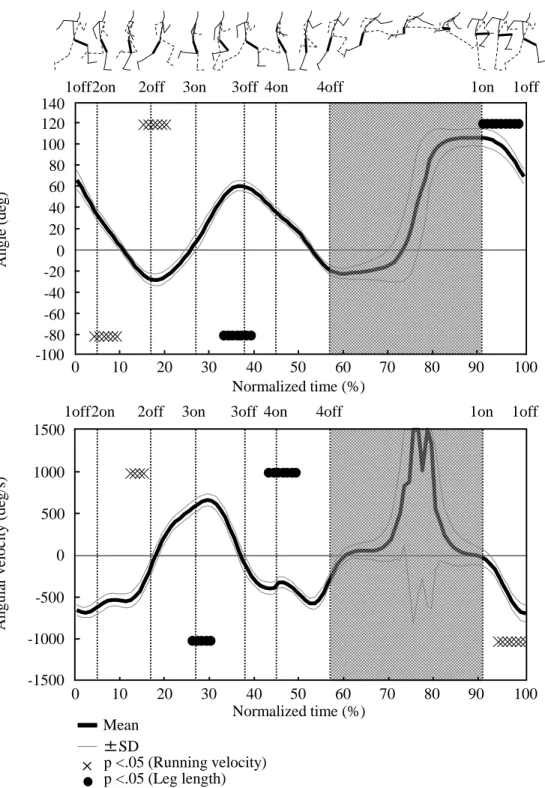
Figure 4-8 Changes in the angle and angular velocity of the lead leg shank during four-step
hurdle cycle. … 58
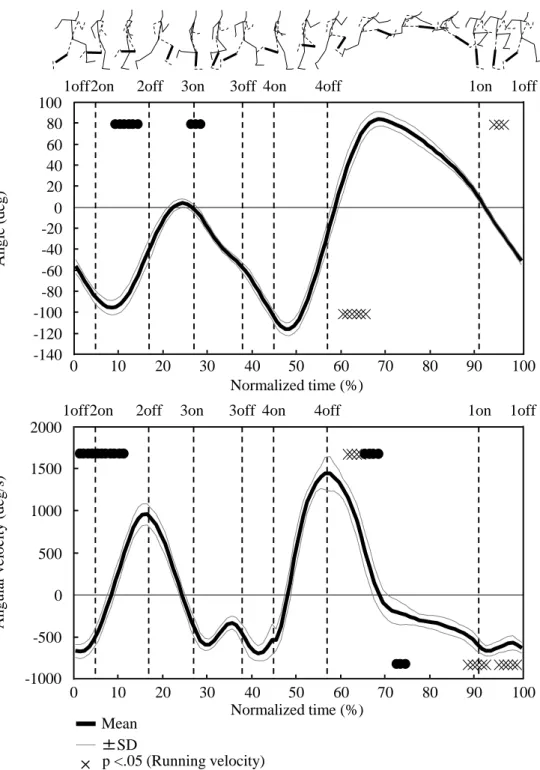
Figure 4-9 Changes in the angle and angular velocity of the lead leg thigh during four-step hurdle cycle. … 59 Figure 4-10 Changes in the angle and angular velocity of the trail leg shank during four-step
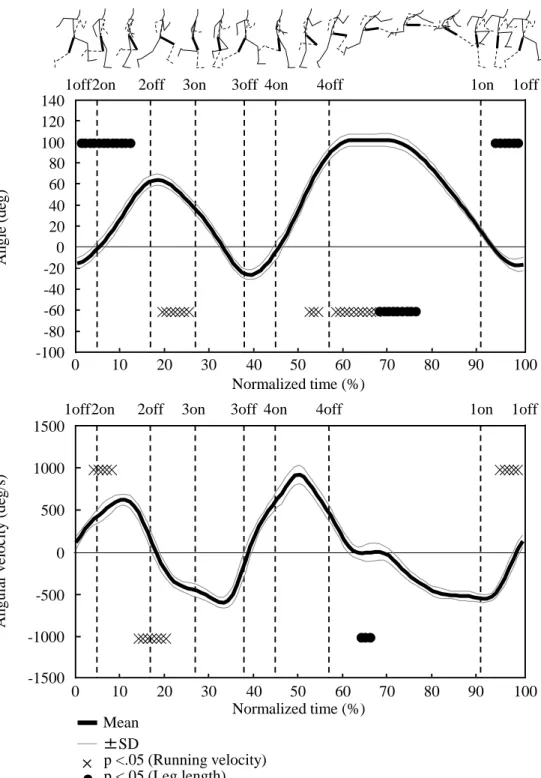
hurdle cycle. … 60 Figure 4-11 Changes in the angle and angular velocity of the trail leg thigh during four-step
hurdle cycle. … 61 Figure 5-1 Relationship between average horizontal velocity and duration of each phase.
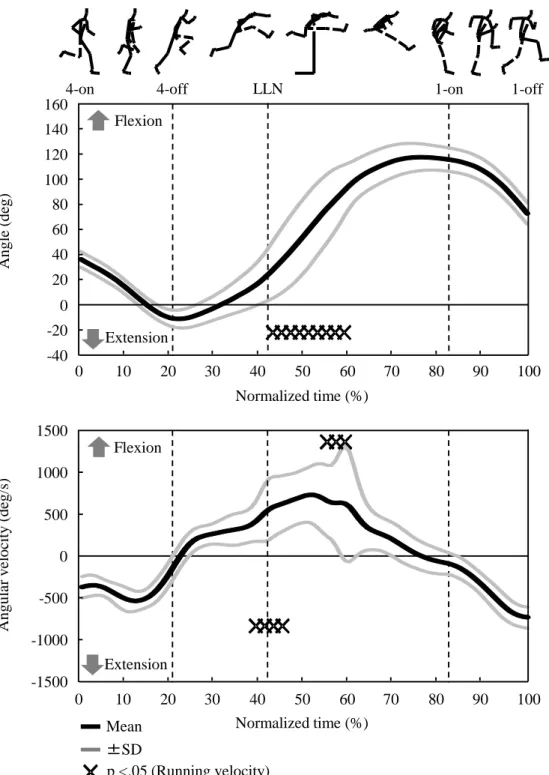
… 72 Figure 5-2 Changes in the flexion / extension angle and angular velocity of the trail leg hip
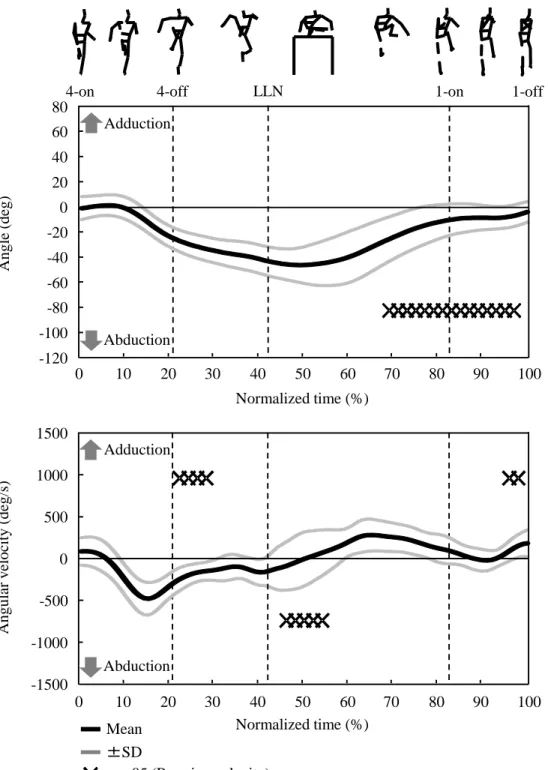
during hurdling. … 73 Figure 5-3 Changes in the adduction / abduction angle and angular velocity of the trail leg
hip during hurdling. … 74 Figure 5-4 Changes in the angle and angular velocity of the trail leg knee during hurdling.
… 76 Figure 5-5 Changes in the angle and angular velocity of the trail leg ankle during hurdling.
… 77 Figure 5-6 Changes in the flexion / extension angle and angular velocity of the lead leg hip
during hurdling. … 78 Figure 5-7 Changes in the adduction / abduction angle and angular velocity of the lead leg
hip during hurdling. … 79 Figure 5-8 Changes in the angle and angular velocity of the lead leg knee during hurdling.
xi
Figure 5-9 Changes in the angle and angular velocity of the lead leg ankle during hurdling. … 81 Figure 5-10 Changes in the normalized angular monenta of the body parts and whole body
about X axis. … 82
Figure 5-11 Changes in the normalized angular monenta of the body parts and whole body
about Y axis. … 83
Figure 5-12 Changes in the normalized angular monenta of the body parts and whole body
about Z axis. … 84
Figure 5-13 The amount of change in normalized angular monenta during each phase about
X axis. … 86
Figure 5-14 The amount of change in normalized angular monenta during each phase about
Y axis. … 87
Figure 5-15 The amount of change in normalized angular monenta during each phase about Z
axis. … 88
Figure 5-16 Changes in the flexion / extension angle and angular velocity of the trail leg hip of typical subjects during hurdling motion. … 98 Figure 5-17 Changes in the adduction / abduction angle and angular velocity of the trail leg
hip of typical subjects during hurdling motion. … 99 Figure 5-18 Changes in the flexion / extension angle and angular velocity of the lead leg hip
of typical subjects during hurdling motion. … 100 Figure 5-19 Changes in the adduction / abduction angle and angular velocity of the lead leg
xii
Figure 6-1 The ratio of step lengths of each step to step length of four-step hurdle cycle motion and the ratio of takeoff distance and landing distance to step length of the
4th step. … 112
Figure 6-2 Changes in the angle and angular velocity of the lead leg shank during four-step hurdle cycle motion. … 115 Figure 6-3 Changes in the angle and angular velocity of the lead leg thigh during four-step
hurdle cycle motion. … 116 Figure 6-4 Changes in the angle and angular velocity of the trail leg shank during four-step
hurdle cycle motion. … 118 Figure 6-5 Changes in the angle and angular velocity of the trail leg thigh during four-step
hurdle cycle motion. … 119 Figure 6-6 Changes in the angle and angular velocity of the trunk during four-step hurdle
cycle motion. … 120
Figure 6-7 Range of thigh of support leg during support phases of each step. … 121 Figure 6-8 The angular velocity of the lead leg at landing of the 1st step. … 122 Figure 6-9 The amount of change in normalized angular momenta during airborne phase of
the 4th step about transverse axis. … 123 Figure 6-10 Changes in the angle and angular velocity of the lead leg shank about typical
subject D during four-step hurdle cycle motion. … 130 Figure 6-11 Changes in the angle and angular velocity of the lead leg thigh about typical
subject D during four-step hurdle cycle motion. … 131 Figure 6-12 Changes in the angle and angular velocity of the trail leg shank about typical
xiii
Figure 6-13 Changes in the angle and angular velocity of the trail leg thigh about typical subject D during four-step hurdle cycle motion. … 133
1 第 1 章 緒言 1.1 研究の背景 1.1.1 ハードル走について 陸上競技のハードル走は,等間隔に設置された一定の高さのハードルを 10 台越えながら, 定められた距離をできる限り短い時間で疾走する競技である.男子では 110mハードル走(以 下,110mH 走と表記)および 400m ハードル走(400mH 走),女子では 100m ハードル走(100mH 走)および 400mH 走が実施されている.110mH 走および 100mH 走(以下,スプリントハ ードル走と表記)では,ハードル間(インターバル)の距離が短く一定であることから (110mH:9.14m,100mH:8.50m),選手の競技レベルに関わらずスタートから 1 台目まで のアプローチ区間では 7 歩または 8 歩,9 回のインターバルでは 4 歩,10 台目からゴール までのランイン区間では約 7 歩で走るという特徴を持つ.400mH 走ではインターバル距離 が 35m と長いことから,歩数には個人差がみられ,またレース中にも速度の低下に伴って 歩数が増加する場合が多い(宮下,1991).これらの競技特性から,ハードル走ではレース における各区間の平均疾走速度変化について検討するレース分析(Susanka et al.,1988;森田 ら,1994;柴山ら,2010)が数多く行われており,400mH 走ではレース中の歩数変化に関 する報告も散見される(Ditroilo and Marini, 2001;Letzelter, 2004).スプリントハードル走で は定められた歩数を可能な限り高いピッチで走破することが第一の運動課題となるのに対 し,400mH 走では歩数とピッチの増減をコントロールし,高い疾走速度をより長い区間持 続する必要があり,より戦略的な種目であるといえるだろう. スプリントハードル走では,競技パフォーマンスの高低にかかわらず,全ての選手がハ ードルの踏切で鉛直速度の増加とともに水平速度が減少し,ハードル間のインターバル走 で水平速度を回復するという 4 歩のサイクルを持ち(McDonald,2002),そのサイクルを 9 回繰り返しながらフィニッシュへ向かう.これらの競技特性から,踏切動作に関する研究
2
(森田ら,1994;串間と小木曽,1995),インターバル走動作に関する研究(磯ら,2002; 谷川ら,2002),複数区間におけるハードリング動作を比較した研究(串間ら,1996;Salo and Scarborough, 2006),アプローチ区間に関する研究(Rash et al., 1990;秋山と有川,2008)な どが行われている.中でも踏切動作に関する研究が数多く行われているが,110mH 走と 100mH 走ではハードルの高さが大きく異なることから(110mH:1.067m,100mH:0.840m), 踏切時に必要とされる鉛直速度は,トップアスリートを対象とした研究(McDonald and Dapena, 1991b)によると,110mH では 1.76m/s と報告されているのに対し,100mH では 1.49m/s と小さい.このように,同じスプリントハードル種目であっても,その動作メカニ ズムは大きく異なっていると考えられる.それは宮下(1991)が「女子は,第 1 にも 2 に も,スピードが要求される」と述べていることからも明らかであろう.これらの競技特性 を踏まえて,スプリントハードル走におけるパフォーマンス決定要因を明らかにするため に,1980 年代から 1990 年代にかけて男女のトップアスリートを対象とした研究が行われて きた(Mann and Herman, 1985;Rash et al., 1990;McDonald and Dapena, 1991a, 1991b;Coh et al., 1998).しかし,量的なデータを用いて詳細な動作分析を取り扱った研究はみられないこ とから,ハードル走の動作特徴やパフォーマンスの決定要因について十分に明らかになっ ているとは言い難い.
1.1.2 日本における 110mH 走の現状と課題
110mH 走の世界記録は,1981 年に Renaldo Nehemiah(USA)が初めて 12 秒台(12.93s) に突入して以降,1989 年に Roger Kingdom(USA)が 12.92s,1993 年に Colin Jackson(GBR) が 12.91s と,わずかながら記録が更新されてきた.しかし,その後は 2006 年に Xiang Liu (CHN)が 12.88s に更新するまで,13 年間記録が更新されなかった.以降は,2008 年に Dayron Robles(CUB)が 12.87s,2012 年には Aries Merritt(USA)が 12.80s と記録を更新し, これが現在の世界記録となっている(2014 年 1 月 1 日現在).以上のことからわかるように,
3 この 30 年間で 0.13s,2012 年より前で考えればわずか 0.06s しか世界記録の更新がなされて いない.一方,同じ陸上競技の 100m 走では,1983 年当時の世界記録は Calvin Smith(USA) の 9.93s であったが,2009 年に Usain Bolt(JAM)が 9.58s を記録し,0.35s もの記録短縮が なされた.このように,近年の 110mH 走における大幅な記録向上を制限した要因として考 えられるのは,前述のように 110mH 走が他のスプリント種目にはない,ハードリング動作 とインターバル走動作という連続的な構造を持っているためと考えられる.水平疾走速度 はストライドとピッチの積で表すことができ(Hunter et al., 2004),100m 走ではストライド とピッチの両方が疾走速度向上の要因になり得るが,110mH 走ではハードル間の距離が決 まっているために,選手はパフォーマンスの高低に関わらず 1 サイクル 4 歩中のストライ ドがほぼ規定され,ピッチの向上が疾走速度向上の主要因となる.そのため,スプリント 種目と比較して大幅な記録向上が難しい種目であるといえるだろう. ストライドが規定されているということは,日本人選手が世界一流選手に近づくチャン スがある種目と考えることもできる.現に,110mH 走では 2004 年にアテネオリンピックで 金メダルを獲得し,その後世界記録を樹立した Xiang Liu を初めとする中国人選手が世界的 に活躍している.しかし,現在の日本記録は 2004 年に谷川 聡がマークした 13.39s であり, 世界記録に対して大きく差をつけられている.2012 年に行われたロンドンオリンピックで は,準決勝で 13.31s までの記録を残した選手が決勝に進出していることから(International Association of Athletics Federations, online),たとえ日本人選手が世界大会の準決勝で日本記 録と同程度の記録を出したとしても,決勝に進むことが難しい状況にある.このような現 状から,世界一流選手と日本人選手の動作を比較し,競技力向上への示唆を明らかにする ことを目的とした研究が散見され(森田ら,1994;大橋ら,2006;谷川と柴山,2010),主 として矢状面の踏切動作の分析が行われている.しかし,110mH 走におけるハードリング 動作は踏切脚の側方への振り上げを伴う 3 次元的な動作であり,矢状面に限定された分析 では,ハードリング動作における技術的要因を定量化することは困難であると考えられる.
4 それにも関わらず,3 次元的に動作分析を行っている研究は非常に少ない(McDonald and Dapena,1991a;藤井ら,1997a,1997b). インターバル走およびハードリングの各歩にはそれぞれ固有の役割があることが指摘さ れており(McDonald,2002),それらの関連性を考慮してパフォーマンス向上への示唆を明 らかにするためには,踏切動作だけではなく,インターバル走動作およびハードリング動 作(以下 1 サイクル動作と表記)を連続的に分析する必要があると考えられる.しかし, これまでの研究は,インターバル走動作またはハードリング動作のどちらかに着目して分 析したものが多い.数少ない 1 サイクル動作を分析した研究として,伊藤と富樫(1997) の大学男子選手を対象としたハードル走速度と動作の関連を分析した研究があり,ハード ル走速度と有意な相関が認められたキネマティクスおよびキネティクス的パラメータは, 踏切動作と着地動作に多くみられたことが報告されている.しかし,伊藤と富樫の研究は ハードリング動作を 2 次元的に分析しており,1 サイクル各歩の動作について,ハードリン グ動作の 3 次元的特徴を含めて詳細に分析し,各歩相互の関連について考察した研究はみ られない. 宮下(1991)が「どの競技者も同じ高さのハードルを越えなければならないために,身 長,特に脚長に優れていることが非常に有利となる」と述べているように,現在の一流 110mH 走選手には長身の選手が多い(谷川,2006).しかし,世界陸上競技選手権大会で 4 度の優勝を果たしている Allen Johnson 選手(USA)のように,世界一流ハードル走選手の 中では比較的低身長(1.78m)でも高いパフォーマンスを達成している選手も存在している. このような選手では,高身長の選手とは異なったハードル走技術を用いていると考えられ るが,身長や脚長を考慮して 1 サイクル動作を分析した研究は見当たらない. 以上のことから,選手の形態を考慮し,110mH 走の 1 サイクル動作に関するバイオメカ ニクス的分析を行うことによって,日本人選手の技術改善の方向性を示す必要があると考 えられる.
5 1.1.3 110mH 走のトレーニング法 選手は各競技種目に必要なスキル獲得やパフォーマンス改善のために,目的に応じたト レーニングを行う必要がある(ボンパ,2006).金原(1976)は,110mH 走に必要とされる 体力要素をスピード,パワー,調整力と述べており,同種目におけるパフォーマンスを改 善するためには,その 3 要素を重点的にトレーニングする必要があると考えられる.この 中で,スピードおよびパワーは他の短距離系走種目,特に 100m 走などの最大努力下におけ る競技で特に必要とされ,そのレースパターンや疾走フォームとあわせて,具体的なトレ ーニング法が確立されている(土江,2009).しかし,もう一つの体力要素である調整力は 複雑な運動能力であり,スピードとも密接に関連している(ボンパ,2006).したがって, 大きい疾走スピードを維持したまま,高さ 1.067m のハードルを正確な動作で 10 台越える ことは容易ではなく,調整力が 110mH 走のパフォーマンスの決定要因の 1 つに挙げられて いると考えられる. 調整力のトレーニング法の一つとして,ボンパ(2006)は動作のスピードやテンポ,リ ズムを変えることを挙げている.スプリント走と同様に水平疾走速度の増加を目的として いるハードル走では,疾走速度を変化させるためにその構成要素であるストライドまたは ピッチ(Hunter et al., 2004),あるいはその両方を変化させることにより,調整力のトレーニ ングを行うことができると考えられる.具体的なトレーニング法としては,宮下(1991) や谷川(2012)が指導書の中でハードル間の距離や高さといった設置条件を変化させたト レーニングを提案している.しかし,それらのトレーニング効果に関して検討を行った研 究は少なく(串間,1999;大橋,2009),ハードルの設置条件の変化が,公認競技会で用い られる距離である 9.14m 間隔のハードル走に及ぼす影響については明らかにされていない. 実践的なハードル走のトレーニング法を考えるためには,ハードルの設置条件を変えたト レーニングが,正規のハードル間距離の試技に与える影響について検討する必要があるだ ろう.
6 1.2 本研究の目的 本研究の目的は,一流 110m ハードル走選手の 1 サイクル区間の動作を分析し,疾走速度 に関係するバイオメカニクス的要因を明らかにするとともに,その知見をもとに 1 サイク ル時間の短縮に有効なトレーニング法を提案することである. 1.3 研究課題 本研究の目的を達成するために,以下の研究課題を設定した. 研究課題 1(第 4 章) 一流 110m ハードル走選手の 1 サイクル区間の動作を 2 次元的に分析し,疾走速度および 脚長と関係のあるキネマティクス的要因を明らかにする. 研究課題 2(第 5 章) 一流 110m ハードル走選手のハードリング動作を 3 次元的に分析し,疾走速度と関係のあ るキネマティクスおよびキネティクス的要因を明らかにする. 研究課題 3(第 6 章) 研究課題 1,2 によって得られた結果から,110m ハードル走の 1 サイクル時間の短縮に有 効かつトレーニングの現場で簡便に実施できるトレーニング法を考案し,その即時的効果に ついて検討する. 1.4 本研究の仮定 本研究は以下の仮定のもとで行われた. ① 研究課題 1,2 で対象とした公認競技会における分析対象者は,国内外の一流 110m ハー ドル走競技者を代表するものである.
7 ② 公認競技会における分析区間(第 6 インターバル),または研究課題 3 の実験における 分析区間(第 3 インターバル)の 1 サイクル区間の動作は,走者の特徴を表したもので ある. ③ 走動作は 3 次元的であるが,研究課題 1,2 のインターバル区間および研究課題 3 では 矢状面内の 2 次元動作分析によって,動作の特徴を知ることができる. ④ 研究課題 1,2 では公認競技会での動作を分析したため,身体計測点にマークを貼付す ることができなかったが,分析者はデジタイズを習熟しているので,計測点の座標は適 切に収集できる. ⑤ 外国人選手にも日本人アスリート用の身体部分慣性係数(阿江,1996)が適用できる. ⑥ 研究課題 3 における被験者は,研究課題 1,2 における分析対象者と競技レベルが異な るが,得られた知見は国内外一流競技者にも適用できる. 1.5 本研究の限界 本研究には以下に述べる限界があろう. ① 公認競技会における撮影では,サンプリング周波数はインターバル区間では 60 コマ/ 秒,ハードリング区間では 200 コマ~300 コマ/秒であるのに対し,トレーニング実験 では両区間とも 300 コマ/秒であり,算出項目のピーク値に差が生じる. ② 研究課題 1,2 におけるインターバル区間と,研究課題 3 における 1 サイクル区間では 2 次元動作分析を行っているため,前額面内の動作に関しては明らかにできない. ③ 部分および全身の重心座標と角運動量の算出に用いた身体部分の質量や慣性特性は,阿 江(1996)の推定式を用いて算出しており,分析対象者個々の慣性特性ではない.
8 第 2 章 文献研究 2.1 110mH 走のレース分析に関する研究 ハードル走では,ハードルを越えた後のリード脚の接地瞬間を基準として,各インター バルに要した時間を計測し,スタートから 1 台目ハードルまでのアプローチ区間と,10 台 目からゴールまでのランイン区間の 2 区間を加えた計 11 区間に要した時間もしくは速度に よるレース分析が数多く行われている. 110mH 走のレース分析に関する報告はトップアスリートに関するものが多く,特にオリ ンピックや世界選手権大会などの世界大会を対象にしたものが多い(Susanka et al., 1988; 森 田ら,1994; Müller and Hommel, 1997).柴山ら(2010)は,2007 年に行われた世界陸上競技 選手権大阪大会に出場した 12.95s~13.92s の 110mH 選手 37 名を上位群,中位群,下位群に 分類し,各インターバルに要した時間を,さらにインターバルラン区間とハードリング区 間に分けて比較している.その結果,各群の平均ハードリングタイムに有意差はみられな かったが,平均インターバルランタイムは上位群,中位群,下位群の順に短かったことを 報告している.また,レースにおける優勝者と日本人選手の速度推移について比較を行っ たところ,優勝者では前半から中盤区間における大きい速度増加がみられたことに加えて, 速度を維持している区間が長かったことを報告している. 大山ら(1979)は,公認競技会における 14.3s から 16.7s までの選手 87 例のレース分析を 行い,14 秒台,15 秒台,16 秒台の各グループに関するスタートからゴールまでの速度推移 を比較している.その結果,14 秒台および 15 秒台グループでは第 1 から第 4 ハードル区間 で最大速度区間が出現し,第 6 ハードルまで維持していたのに対して,16 秒台グループで は第 1 から第 2 ハードル区間に最大速度区間が出現し,以降では大きな速度低下がみられ たことを報告しており,その要因としてハードル技術の習熟度を挙げている.
9 宮下(1993)は,12 秒台から 16 秒台の 152 例のレース分析を行い,レース記録と各ハー ドル後の接地瞬間の時間との直線回帰式を求めることにより,モデルタッチダウンタイム を算出している.また,宮代ら(2013)は,宮下の提示したモデルタッチダウンタイムで は,14 秒台レースのデータ数が少ないことや,データの一部に 50-60fps のカメラが使用さ れていたことに着目し,13.71s から 14.59s までの 75 例のデータを用いて,ハイスピードカ メラを使用したモデルタッチダウンタイムの再検討を試みている.その結果,より精度の 高いモデルタッチダウンタイムを作成できたと述べている.これらの情報は,競技会にお ける自己のレース評価に役立つとともに,トレーニングにおける目標や課題の設定に有効 である(宮下,2012). 以上の研究から,記録の良い選手ほど 1 インターバルにおける最高速度が大きく,また その速度を維持できる区間も長いことが明らかとなっている.さらに,幅広いレベルのレ ース分析結果から求められたモデルタッチダウンタイムは,トレーニングにおける重要な 情報となっている.しかし,110mH 走のパフォーマンスについて論じるためにはレース分 析から得られる情報だけでは不十分であり,レース展開とそれらの速度を生成する動作要 因を複合的に検討する必要があるだろう. 2.2 110mH 走動作に関する研究 2.2.1 ハードリング動作に関する研究 宮下(1991)は,ハードリング動作について「ハードリングとは,疾走中に規則的に配 置された,ある高さのハードルを疾走フォームやリズムをできる限り小さな変化で走り越 えていく技術」と述べている.そのため,水平疾走速度の低下をできる限り抑えるための 踏切および着地動作に関する研究が多く行われている.また,数は少ないものの,踏切か ら着地までの空中動作についても,3 次元的な検討が行われている.
10 走幅跳では,踏切における鉛直速度の増加と水平速度の減少の間に中程度の正の相関関 係が認められており(Hay et al., 1986),踏切中に身体重心の速度ベクトルの向きを変えるた めには,地面反力の減速成分を増加させる必要があることが明らかとなっている(Cooper et al., 1973).ハードル走でも,ハードルクリアランスのために身体重心の上昇が必要であるこ とから,走幅跳と同様の傾向があると推察される.ハードル走の踏切および着地における 地面反力について分析した研究では(LaFortune, 1988; McLean, 1994; Coh, 2004),水平速度 維持のためには,踏切および着地支持期に要する時間,特にブレーキ局面時間が短いこと によって,地面反力の減速成分を小さくすることが重要であると報告されている. 山田(1990)は,日本一流ハードル走選手 2 名のデータをもとに,踏切時の地面反力を 変化させたシミュレーションを行い,踏切における水平速度の減少要因について検討して いる.その結果,踏切中の水平速度の減少量が大きくなるほど,離地時の鉛直速度が大き くなることを報告している.さらに,離地時の鉛直速度の大きさはハードルを越えるため の身体重心の上昇幅に応じて決まることから,ハードル走の踏切における水平速度の減少 を少なくすることは困難であると述べている. 宮下ら(1999)は,日本一流ハードル走選手 2 名の踏切動作を縦断的に分析し,ストラ イド,身体重心水平速度及び鉛直速度,体幹および下肢の角度といったキネマティクスデ ータと,左右軸まわりにおける両脚の角運動量を算出している.その結果,競技力の向上 とともに,離地時の鉛直速度が減少し,水平速度が増加していたことを報告しており,そ の要因として,踏切脚の動作だけでなく,振り上げ脚や上体の動作が改善されていたこと に加えて,それらの動作のタイミングが改善されていたことを挙げている. 森田ら(1994)は 1991 年の世界陸上競技選手権東京大会に出場したハードル走選手の踏 切および着地動作を 2 次元的に分析し,世界一流選手 2 名と日本人選手 1 名の動作の違い について検討している.その結果,日本人選手は膝関節の屈曲伸展を主とした踏切動作で
11 あったが,世界一流選手は接地から離地にかけて膝関節が屈曲し続けており,日本人選手 はより身体を上昇させるための動作を行っていたことを報告している. 滞空期では重力以外の外力が作用しないことから,空中では着地後すぐにインターバル 走動作を開始できるように身体動作を行う必要がある.また,踏切脚は側方への振り上げ を伴う 3 次元的な動作を行っていることから,空中局面では 3 次元動作分析を行っている 研究についてまとめる. 藤井ら(1997a,1997b)は,日本一流選手を含む男女ハードル走選手及び混成競技選手 15 名(男子 8 名,女子 7 名)を被験者として,4 台目ハードルのハードリング動作におけ る滞空期の下肢関節トルク,トルクパワーや力学的エネルギーの流れについて検討してい る.その結果,踏切脚の側方への振り上げ動作は離地後の股関節外転トルクや内旋トルク によるものではなく,股関節の関節力パワーや屈曲トルクパワーによるエネルギーを,内 転トルクによって側方への振り上げ動作のためのエネルギーに変換することによって生じ ていたことを明らかにしている.
McDonald and Dapena (1991a) は,1988 年の全米オリンピックトライアルに出場した男子 選手 23 名と女子選手 9 名の 5 台目ハードル前後の動作を 3 次元的に分析し,主としてハー ドリング局面における身体各部分の角運動量について検討している.その結果,リード脚 の素早い振り下ろし動作を行うためには,踏切離地時に左右軸まわりにおける全身の前回 りの角運動量を大きくする必要があり,その角運動量は踏切局面で踏切脚を後方に残すこ とによって獲得できると報告している. 以上の研究から,踏切局面では踏切脚膝関節の伸展動作を小さくし,ハードルクリアラ ンスのために生じる鉛直速度を小さく保つことで水平速度の減少を可能な限り抑えるとと もに,踏切脚を後方に残すことによって大きい身体の角運動量を獲得することが重要であ る.また,空中局面では踏切で獲得した角運動量によってリード脚を素早く振り下ろし, 着地局面で踏切局面と同様に減速を抑えた動作を行うことが,ハードリング動作の技術ポ
12 イントとして挙げられるだろう.しかし,宮下(1991)が「ハードル越えとインターバル の走りによって一つのリズムユニットを形成する」と述べているように,110mH 走ではハ ードル間における 4 歩を一連の流れと捉えて分析する必要がある.したがって,ハードル 走の競技力向上への示唆を得るためには,ハードリング局面のみに限定した研究では不十 分であろう. 2.2.2 インターバル走動作に関する研究 ハードリング動作に関する研究は多いが,インターバル走動作に関する研究は非常に少 ない.なお,本章では 4 歩全てを分析対象としている場合でも,ハードリングの空中動作 を含めた動作分析を行っていない場合は,インターバル走動作に関する研究として扱った. 谷川ら(2002)は,自己記録が 13 秒台から 14 秒台までの選手を被験者として,3 台目か ら 4 台目ハードルまでのインターバル 3 歩における支持および滞空時間,ストライド,身 体重心高や膝関節角度などを算出し,スプリント走と比較した.その結果,1 インターバル 走速度が大きい被験者の特徴として,ハードル後の 1 歩目では脚全体の振り戻し速度が大 きく,ハードリングからの重心の落下が小さいこと,2 歩目ではスプリント走に近い動作を 行っていること,3 歩目では上下動を小さくして水平速度を維持していることを報告してい る. 磯ら(2002)は,オリンピック優勝者を含む世界一流選手および日本一流選手 8 名の公 認競技会における 7 台目ハードル前後の動作を分析し,ストライド,各歩の所要時間や下 肢関節角度の変化などを算出し,世界一流選手と日本一流選手の動作の違いについて検討 している.その結果,各歩の所要時間と記録の間には全て正の相関関係がみられたが,中 でも 4 歩目が最も相関係数が高く,次いで 2 歩目,3 歩目,1 歩目の順番であった.このこ とから,インターバル走では 2,4 歩目が重要であり,1 歩目を腰の真下に接地することが 必要であると述べている.
13 以上の研究から,インターバル走動作では 2 歩目でスプリントに近い動作を行うことに よって高いピッチを獲得するとともに,4 歩目で滞空時間を短縮する必要があると推察され る.しかし,インターバル走動作に関する研究は非常に少なく,被験者数や分析項目も限 られていることから,インターバル走動作に関する研究は十分になされているとは言い難 い.また,ハードリング動作に関する研究でも述べたように,110mH 走では 4 歩を一連の 流れと捉えて分析する必要があり,ハードリング動作との連続性についての検討が必要で あろう. 2.2.3 1 サイクル動作に関する研究 ここまで述べてきたように,110mH 走のパフォーマンス向上の要因について検討するた めには,ハードリング動作およびインターバル走動作,つまりは 1 サイクル動作を連続的 に分析する必要がある. 伊藤と富樫(1997)は,大学男子選手 9 名を被験者として,3 台目から 4 台目ハードルま での動作分析を行い,身体重心の速度変化量,下肢関節角度,下肢関節トルクおよびトル クパワーなどを算出し,疾走速度との関係やスプリント走との類似性について検討してい る.その結果,疾走速度の大きかった選手ほど踏切支持期における減速量が小さかったこ とや,リード脚着地前における股関節伸筋群の仕事量が大きく,それによって脚全体の振 り戻し速度が大きかったことなどを報告している.また,疾走速度と有意な相関が認めら れた項目は踏切動作と着地動作に多くみられたことから,1 サイクル動作におけるハードリ ング動作の重要性について報告している.
McDonald and Dapena (1991b) は,前述の McDonald and Dapena (1991a)と同様の実験設定 におけるキネマティクス的分析を行い,1 サイクル動作中の身体重心高の変化や,ストライ ド,ピッチ,身体重心水平速度および鉛直速度などを算出し,各歩の値について比較して いる.その結果,踏切で減少した水平速度は主として 2 歩目で補償されていること,また
14 ハードルクリアランス後の身体重心の下降が 2 歩目の支持期まで続くことを報告している. さらに,これらのキネマティクスデータをもとに,McDonald (2002) は 1 サイクル動作にお ける 4 歩それぞれの役割について検討している.その結果,ハードリング後の 1 歩目は 「Landing step」であり,支持期中身体重心が下降を続けるが,その下降幅を可能な限り小 さくし,2 歩目で速度を回復させるための準備を行う歩であると述べている.2 歩目は 「Recovery step」であり,接地時には身体重心の鉛直速度は大きな負の値を示しているため, 支持脚にエキセントリックな筋収縮を生じ,踏切時に減少した水平速度を補償する歩であ るとしている.3 歩目は「Preparatory step」であり,体幹の前傾が早く,また遊脚のスイン グが小さくなることによって滞空期に要する時間が短くなり,結果として次の 4 歩目の接 地時における鉛直速度が減少することから,ハードルクリアランスの準備動作を行う歩で あると述べている.最後に 4 歩目は「Hurdle step」であり,ハードルを越えるための鉛直速 度が生成される歩であるが,できる限り鉛直速度の増加を小さくすることによって水平速 度の減少を抑えることができると述べている.
これらの研究から,McDonald (2002) が“Hurdling Is Not Sprinting”と述べているように, ハードル走ではスプリント走とは異なり 1 サイクル中の 4 歩それぞれに固有の役割がある ため,各歩の動作特徴を詳細に分析し,相互の関連について明らかにする必要があると考 えられる.しかしながら,ハードリング動作の 3 次元的な分析を含む 1 サイクル動作に関 する研究は行われておらず,ハードル走の特徴については十分に明らかになっていないと 考えられる. 以上の文献研究から,ハードリング動作に関する研究は多いものの,インターバル走動 作や,それらの連続的な動作である 1 サイクル動作に関する検討は十分になされていない. ハードル走の競技力向上への基礎的知見を得るためには,1 サイクル動作における各歩相互
15 の関連を含めた分析を行い,疾走速度との関係性について検討する必要があると考えられ る. 2.3 ハードル走のトレーニングに関する研究 ハードル走の競技力向上のためには,疾走速度の大きい選手の動作特徴に関する研究を 行うことに加えて,それらの特徴をもとにしたトレーニング手段の開発が必要となる.水 平疾走速度はストライドとピッチの積で表すことができ(Hunter et al., 2004),スプリント走 と同様に水平疾走速度の増加を目的としているハードル走では,疾走速度を変化させるた めにストライドまたはピッチ,あるいはその両方を変化させるトレーニングを行う必要が あると考えられる. 宮下(1991)はインターバル距離とハードルの高さを変化させたトレーニングが有効で あると指導書の中で述べており,その効果について言及している.それによると,ピッチ 向上のためにはインターバルを 8.6~8.8m に短縮して 3 歩で疾走するトレーニングが有効で あり,加速能力向上のためには,インターバル距離を 1 台ごとに伸長して 5 台まで全て 3 歩で疾走するトレーニングが有効であると述べている.しかし,宮下(1991)はこれらの トレーニング効果について詳細な検討を行っていない. 大橋(2009)は,日本人一流選手を含む 5 名を被験者として,ハードルの高さとハード ル間の距離を変化させた 3 条件におけるキネマティクス的特徴を正規の条件と比較し,そ のトレーニング効果について検討している.その結果,インターバルを短縮した試技では, 疾走速度が減少するものの,2 歩目および 3 歩目の膝関節伸展角変位が小さくなることによ って滞空時間が減少し,ピッチが向上したことを報告している.また,ハードルの高さを 低くした試技では,4 歩全てにおける支持脚スウィング速度が増加することによって,疾走 速度が増加していたと述べている.
16 串間(1999)は,インターバル距離を正規(9.14m)に設定したハードル走と,8.6m に短 縮したハードル走を比較し,接地および滞空時間の変化について報告している.それによ ると,インターバル距離を短縮したハードル走では,接地および滞空時間の短縮が認めら れたと述べている. これらの指導書や研究から,ハードルの設置条件を変化させたトレーニングの有効性に ついてのバイオメカニクス的な検討がなされ,その効果について明らかになっている.し かし,ハードルの設置条件を変化させることが,公認競技会で用いられる距離である 9.14m 間隔のハードル走にどのような影響を及ぼすかということについては明らかにされていな い.実践的なハードル走のトレーニング方法を考えるためには,ハードルの設置条件を変 えたトレーニングが,正規のハードル間距離の試技に与える影響について検討すべきであ ろう.
17 第 3 章 方法 3.1 データ収集 図 3-1 は,本研究の研究課題とデータ収集法を示したものである.本研究では,研究課題 1 および 2 のデータ収集のために,競技会における 110mH 走レースを VTR 撮影した.次に, 研究課題 1 および 2 の結果から得られた知見をもとに,研究課題 3 におけるトレーニング 実験を行った. 3.1.1 競技会におけるデータ収集 3.1.1.1 分析対象者 表 3-1 は,競技会の 110mH 走レースにおける分析対象者の身長,脚長,体重,シーズン ベスト記録,レース記録,シーズンベスト記録(SB)に対する当該競技会における記録(RT) の達成率(SB / RT×100),分析区間(第 6 インターバル)に要した時間を,分析対象者の 平均と標準偏差で示したものである.2007 年から 2008 年に開催された公認競技会における 110mH レースに参加した国内外の一流男子選手 29 名を分析対象者とした.分析対象者には, 世界記録保持者やオリンピック優勝者などの世界一流選手,日本選手権優勝者や日本学生 選手権優勝者などの日本一流および学生一流選手を含んでおり,シーズンベスト記録に対 する当該競技会における記録の達成率が 98%以上を達成したレースを対象とした. 3.1.1.2 VTR 撮影 表 3-2 は,VTR 撮影した競技会レースを示したものである.上段は,日本陸上競技連盟 科学委員会バイオメカニクス班の活動により撮影されたものである.同委員会によって撮 影されたレース以外の大会主催者には,事前に文書および口頭で撮影内容についての説明 を行い,撮影の許可を得た.
18 研究課題1 一流110mハードル走選手の1サイクル動作 を2次元的に分析し,疾走速度および脚長と 関係のあるキネマティクス的特徴を明らか にする. ・ 競技会レースにおけるVTR撮影(N=29) インターバル局面では2次元撮影,ハードリング局面では3次元撮影を行った. 研究課題2 一流110mハードル走選手のハードリング動 作を3次元的に分析し,疾走速度と関係のあ るキネマティクスおよびキネティクス的特 徴を明らかにする. 研究課題3 研究課題1および2によって得られた結果から,110m ハードル走の1サイクル時間の短縮に有効かつトレー ニングの現場で簡便に実施できるトレーニング法を 考案し,その即時的効果について検討する. ・ トレーニング実験におけるVTR撮影(N=5)
19
Table 3-1 Characteristics of the subjects (N=29).
Mean±SD Range (max-min) Height (m)
Mass (kg) Season best (s)
Time in analyzed race (s) Achievement ratio (%) 1.84±0.05 1.95-1.77 74.6±6.9 91.0-60.0 13.65±0.45 14.37-12.92 13.77±0.45 14.48-13.02 99.16±0.73 100.0-98.0 Duration of four-step hurdle cycle (s) 1.07±0.04 1.14-1.01 Leg length (m) 0.85±0.04 0.92-0.77
20
Competitions Date N of Subjects
Track and Field meet in University of Tsukuba 2007.4 - 2008.5 4 IAAF Japan Grand Prix in Osaka 2007 2007.5.5 3 91th Japan Track and Field National Championships 2007.6.29-30 9 11th IAAF World Championships in Athletics 2007.8.29-31 11
Table 3-2 Competitions videotaped.
87th Kanto Intercollegiate Track and Field meet 2008.5.18 1 77th Japan Intercollegiate Track and Field meet 2008.9.14 1
21 図 3-2 は,競技会におけるカメラの設置位置と撮影範囲について示したものである. 110mH レース中の 6 台目ハードルのリード脚の接地から,7 台目ハードルの踏切脚の接地ま で(インターバル区間)を 1 台のデジタル VTR カメラ(DCR-VX2000 または HDR-FX1, SONY 社製,撮影スピード毎秒 60 コマ,露出時間 1/1000 秒~1/2000 秒)を用いて撮影を行 った.また,7 台目ハードルの踏切脚の接地からハードリング後のリード脚の離地まで(ハ ードリング区間)を 2 台の高速度 VTR カメラ(HSV-500C3,NAC 社製,撮影スピード毎秒 250 コマ,露出時間 1/1000 秒または Phantom V4.3,Nobby Tech 社製,撮影スピード毎秒 200 コマ,露出時間 1/600 秒~1/5000 秒または Exilim EX-F1,CASIO 社製,撮影スピード毎秒 300 コマ,露出時間 1/1000 秒)を用いて撮影を行った.また,レース中の各区間平均走速 度の推移を調べるために,1 台または 2 台のデジタル VTR カメラ(DCR-VX2000,SONY 社製,撮影スピード毎秒 60 コマ)を用いて,スタートピストルの閃光を露出時間 1/60 秒で 撮影後,露出時間 1/1000 秒で分析対象者の追従撮影を行った. インターバル区間では,選手からできる限り離して VTR カメラを水平に固定し,進行方 向(X 方向)8m の区間を撮影範囲とした.身体計測点の 2 次元座標を算出するため,レー スに先立ち較正マークまたはコントロールポイントを計測範囲に配置して撮影した.ハー ドリング区間では,左右方向(X 方向)5.0m~6.1m,進行方向(Y 方向)8m,鉛直方向(Z 方向)2.45~2.5m を撮影範囲とした.身体計測点の 3 次元座標を算出するため,レースに 先立ちコントロールポイントを計測範囲に配置して撮影した. 3.1.2 トレーニング実験におけるデータ収集 3.1.2.1 被験者 被験者は,110mH 走を専門とする男子競技者 5 名であった.表 3-3 は,トレーニング実 験における被験者の身長,体重,自己ベスト記録を示したものである.実験に際し,仙台
22 6th
Hurdle
7th Hurdle
Figure 3-2 Camera setting for competitions.
DV camera (60 fps)
: Reference marks for DV camera
: Calibration pole for HSV
1.22 - 1.25m 2m 0.30 - 0.53m 0.74 – 1.11m 1.31 – 1.50m 1.80 – 2.00m 2.44 - 2.69m Finish HSV (200 – 300 fps) HSV (200 – 300 fps) Calibration pole
: Control point for DV camera (1.00-2.45m)
0.00 - 0.03m
Panning DV camera (60 fps)
23
Table 3-3 Characteristics of the subjects for the training experiment .
Mean±SD
Height (m) Mass (kg) Personal best (s) Subjects A 1.77 65.0 14.13 B 1.85 73.0 15.56 C 1.74 65.0 15.64 D 1.78 76.0 15.88 E 1.70 58.0 15.99 1.77±0.06 67.4±7.2 15.44±0.75
24 大学倫理審査会の承認を受けるとともに,被験者に実験の趣旨について説明し,実験参加 の同意を得た. 3.1.2.2 トレーニング 図 3-3 はトレーニング実験における各被験者の実験プロトコルについて示したものであ る.全ての被験者は,まず Pre-trial として,特別なトレーニングを実施せずに公認競技会と 同様の正規条件(スタートから 1 台目までの距離 13.72m,インターバル距離 9.14m)にお けるハードル 5 台走を行った(pre 試技).その後,以下に示すような 3 種類のトレーニン グを被験者の内省に基づき最少で 2 本,最多で 4 本実施し,各トレーニング後に同様に正 規条件における測定試技を行った. 1) インターバル距離を短縮したトレーニング(測定試技:864 試技) 競技会の分析対象者における 1 サイクル時間の平均値は 1.07s,最小値は 1.01s であり(表 3-1),0.06s の差がある.インターバル距離を変化させても疾走速度が変化しないと仮定す れば,1 サイクル時間が 1.07s の選手の疾走速度は 8.56m/s(9.14m÷1.07s)となる.そこで, インターバル距離を 0.5m(8.56m/s÷0.06s)短縮することでピッチが増加すると仮定して, 模擬的に 1 サイクル時間を短縮するためのトレーニングとした. 2) インターバル距離を伸長したトレーニング(測定試技:964 試技) インターバル距離を短縮したトレーニングとは逆に,インターバル距離を 0.5m 伸長し, ストライドを増加させるトレーニングとした. 3) アプローチ距離を伸長したトレーニング(測定試技:20mAp 試技) 一般的に,100m 走の 1 次加速区間は 20m 前後とされており(土江,2011),110mH 走の 正規条件におけるアプローチ区間の距離はそれよりも短い(13.72m).したがって,選手は 十分に加速できないままに 1 台目ハードルを越えていることになり,それは 2 台目以降の
25 A
Pre-trial (No training)
B C D E Subject trial (Number of times) (1) (1) (1) (2) (3) 964 864 20mAp 864 964 training 1st trial trial (Number of times) (1) (1) (2) (1) (2)
20mAp 20mAp 964 20mAp 864
training 2nd trial trial (Number of times) (2) (3) (2) (2) (1) 864 964 864 964 20mAp training 3rd trial trial (Number of times) (1) (1) (3) (1) (2)
864 : Training for short interval. 964 : Training for long interval. 20mAp: Training for long approach.
26 動作にも影響を与えていると考えられる.このアプローチ距離を伸長することにより,1 台 目を超える際の疾走速度を増加させるトレーニングとした. 以上のトレーニングの順番は,順序効果を考慮してランダムに割り振った(表 3-4).被 験者には,各トレーニング条件に慣れるまで十分な練習時間を確保するとともに,十分な 休憩を挟んだ.測定試技に際しては,事前のトレーニングのイメージを保ちつつ,全力で 行うよう指示した.同じ測定試技を 2 本以上実施する場合には,トレーニングを 1 回以上 行わせてから 2 本目以降の測定試技を行った. 3.1.2.3 VTR 撮影 図 3-4 は,測定試技の撮影方法(上図)およびトレーニングの設定(下図)について示し たものである.スタンディングスタートからハードル 5 台走を行わせ,3 台目ハードルの踏 切脚の接地から 4 台目ハードリング後のリード脚の離地までを 1 台の高速度 VTR カメラ (Exilim EX-F1,CASIO 社製,撮影スピード毎秒 300 コマ,露出時間 1/1000 秒)を用いて パンニング撮影を行った.被験者の内省評価が 5 段階で 3 点以上(値が大きいほど評価が 高い)の試技を分析対象とし,ハードルに脚をぶつけた試技は分析対象外とした. 3.2 データ処理 3.2.1 競技会におけるデータ処理 3.2.1.1 実座標の算出 図 3-5 は,本研究における身体分析点 25 点(左右の第三中手指節関節,手関節中心,肘 関節中心,肩峰,つま先,拇指球,踵骨隆起,足関節中心,膝関節中心,股関節中心,肋 骨下端および頭頂,左右両耳珠点の中点,胸骨上縁)について示したものである.
27
Panning HSV (300Hz) 9.14m
2m
Standard Interval (length of intervals : 9.14m)
8.64m 2. Short Interval (length of intervals : 8.64m)
9.64m 3. Long Interval (length of intervals : 9.64m)
20m 4. Long Approach (length of approach : 20m)
Start
3rd hurdle 4th hurdle
1st hurdle 50m
Figure 3-4 Set-up for the training.
Measurement trial
Training
28 Figure 3-5 Digitizing points of the body.
1.Right hand 2.Right wrist 3.Right elbow 4.Right shoulder 5.Left hand 6.Left wrist 7.Left elbow 8.Left shoulder 9.Right toe
10.Right ball of foot 11.Right heel 12.Right ankle 13.Right knee
14.Right hip 15.Left toe 16.Left ball of foot 17.Left heel 18.Left ankle 19.Left knee 20.Left hip 21.Top of head
22.Midpoint of both tragia 23.Top of sternum
24.Lower end of the right costa 25.Lower end of the left costa 1 2 3 4 5 6 7 8 9 10 11 15 12 13 14 16 17 18 19 20 21 22 23 24 25
29 (1)インターバル区間 インターバル区間を対象に,撮影した VTR 画像から選手の身体計測点 25 点と,較正マ ークまたはコントロールポイントを動作分析装置(Frame-DIASⅡ,DKH 社製)を用いてデ ジタイズした.デジタイズによって得られた身体の 2 次元座標を較正マークまたはコント ロールポイントをもとに実座標に換算した. (2)ハードリング区間 ハードリング区間を対象に,撮影した VTR 画像から選手の身体計測点 25 点を動作分析 装置(Frame-DIASⅡ,DKH 社製)を用い 2 コマごとにデジタイズした.2 つの VTR 画像の 身体計測点とコントロールポイントの 2 次元座標から,DLT 法(Abdel-Aziz and Karara,1971) により 3 次元実座標を算出した.身体計測点の 3 次元座標値算出における標準誤差の最小 値と最大値は,X 方向:0.006-0.014m,Y 方向:0.005-0.016m,Z 方向:0.005-0.014m であっ た.
(3)平滑化
得られた座標値は,バタワース型デジタルフィルタを用いて平滑化した.このときの遮 断周波数は,Wells and Winter(1980)の方法により分析点の座標成分ごとに決定した.実際 に用いた遮断周波数は,インターバル区間では X 座標,Y 座標ともに 3.6~12.6Hz の範囲で あった.ハードリング区間では X 座標 4~13.75Hz,Y 座標 5~13.75Hz,Z 座標 6~15Hz の 範囲であった. (4)重心変位および速度 平滑化した身体分析点の座標データから,阿江(1996)の身体部分慣性係数を用いて身 体部分および全身の重心座標を算出した.また,身体重心座標を時間微分することにより 身体重心速度を算出した.
30 3.2.1.2 レース分析 1) レース中における各区間の平均速度 追従撮影によって得られた映像に VTR タイマーを映し込み,スタートピストルの閃光, 10 回のハードリング後のリード脚接地時の時刻を読み取り,各区間タイムを算出した.そ して,ハードル間の距離(9.14m)を各区間タイムで除することによって,各区間の平均速 度を算出した.また,尾縣(1999)にならい,スタートから 1 台目ハードルまでのアプロ ーチ区間は,着地側の距離を考慮し 1.6m を加えた 15.32m とし,10 台目ハードルからゴー ルまでのランイン区間は,1.6m を減じた 12.42m として平均速度を算出した. 2) レース中における各区間の平均速度比 各分析対象者の最大速度出現区間における平均速度に対する各区間の平均速度比を算出 した. 3.2.2 トレーニング実験におけるデータ処理 3.2.2.1 実座標の算出 撮影した VTR 画像から,選手の身体計測点 25 点(図 3-5)と 2m 毎に地面に設置した較 正マークを,動作分析装置(Frame-DIASⅡver.3,DKH 社製)を用いてデジタイズした.デ ジタイズによって得られた身体の 2 次元座標を較正マークをもとに実座標に換算した. 得られた座標値は,バタワース型デジタルフィルタを用いて平滑化した.このときの遮 断周波数は,Wells and Winter(1980)の方法により分析点の座標成分ごとに決定した.実際 に用いた遮断周波数は,X 座標,Y 座標ともに 6~9 Hz の範囲であった.
平滑化した身体分析点の座標データから,阿江(1996)の身体部分慣性係数を用いて身 体部分および全身の重心座標を算出した.また,身体重心座標を時間微分することにより 身体重心速度を算出した.
31 3.3 局面分け 本研究では,撮影した区間におけるハードリング後のリード脚の離地(1-off)から次のハ ードリング後のリード脚の離地までを 1 サイクルとして,4 歩それぞれに関して次のような 動作時点と局面を定義した(図 3-6). (1)動作時点 ① 接地時(on):足の一部が地面に接した時点 ② 離地時(off):足全体が地面から離れた時点
③ LLN:リード脚の左右軸まわりの角運動量(後述する transfer term と local term の和) が負に切り替わった時点
(2)局面分け
① 支持期(Support phase):接地時から離地時までの期間
② 滞空期(Airborne phase):離地時から次の歩の接地時までの期間
③ ハードリング前半(1st half of airborne phase during the 4th step):4 歩目離地時から LLN までの期間
④ ハードリング後半(2nd half of airborne phase during the 4th step):LLN から 1 歩目接地時 までの期間 3.4 算出項目 3.4.1 キネマティクス的項目 (1)疾走速度 1 インターバルの距離(9.14m)を,動作分析の対象とした区間における 1 サイクルに要 した時間で除したものとした.
32 Figure 3-6 Motion phases during four-step hurdle cycle.
1-off
1-off 2-on 2-off 3-on 3-off 4-on 4-off 1-on
Airborne phase
Four-step hurdle cycle
Support phase Support phase Support phase Support phase Airborne phase Airborne phase Airborne phase 1st step 2nd step 3rd step 4th step 1st step LLN 1st half 2nd half
33 (2)脚長 競技会におけるハードリング区間の VTR 画像から得られた各身体計測点の 3 次元座標か ら,股関節中心点から膝関節中心点までの距離を大腿長,膝関節中心点から足関節中心点 までの距離を下腿長として算出し,大腿長と下腿長の和を脚長とした. (3)各歩の速度変化量 各歩の接地時における身体重心速度と,離地時における身体重心速度の差を,各歩の速 度変化量とした. (4)ストライド 接地した足のつま先と次の歩のつま先の水平座標値の差をストライドとした. (5)踏切距離と着地距離 4-off のつま先とハードルの水平座標値の差を踏切距離,ハードルと 1-on のつま先の水平 座標値の差を着地距離とした. (6)支持時間と滞空時間 高速度カメラで撮影した VTR 画像から,各歩の接地と離地のコマを読み取ることによっ て,支持時間と滞空時間を算出した.4 歩目の滞空期では,4 歩目の離地から LLN までに要 した時間を滞空期前半時間,LLN から 1 歩目の接地までに要した時間を滞空期後半時間と して算出した. (7)ピッチ 接地から次の接地までに要した時間の逆数をピッチとした. (8)下肢の部分および関節角度と角速度 ① 競技会におけるインターバル区間とトレーニング実験における 1 サイクル区間 図 3-7 に示すように,反時計回りを正として大腿,下腿および体幹の部分角度を算出し,さ らに時間微分することで角速度を算出した.なお大腿の角速度は,正の値を前方スイング, 負の値を後方スイング,下腿の角速度は正の値を後方回転,負の値を前方回転と定義した.
34
Figure 3-7 Definitions of the segment angles during interval running.
Shank angle
+
- Thigh angle