Study of a constrained hyperbolic free
boundary problem involving fluid motion based on variational approach and particle method
著者 グエン トリ コン
著者別表示 Nguyen Tri Cong journal or
publication title
博士論文本文Full 学位授与番号 13301甲第3950号
学位名 博士(理学)
学位授与年月日 2013‑09‑26
URL http://hdl.handle.net/2297/39360
Dissertation
Study of a constrained hyperbolic free boundary problem involving fluid motion based on variational
approach and particle method
Graduate School of
Natural Science and Technology Kanazawa University
Major subject:
Division of Mathematical and Physical Sciences
Course:
Computational Science
School registration No.: 1023102011 Name: Nguyen Tri Cong
Chief advisor: Seiro OMATA
Abstract
In this research, we study hyperbolic problem with volume preservation, where a free boundary appears. This problem can be obtained by examining the motion of a droplet on plane. In this phenomenon, the drop is divided into two interacting parts: a film representing the surface of the drop, and the fluid inside the film. The motion of the liquid is described by equation of fluid dynamics (Euler equations). The film, which determines a (moving) boundary for the liquid inside, is considered to be the graph of a scalar function. Free boundary, volume constraint and contact angle are three main features of the model of the film. The underlying surface, on which the droplet rests, plays the role of an obstacle to the motion and gives rise to free boundary. Moreover, the volume preservation constraint is obtained from assumption that the volume of the drop does not change. Finally, there is a positive contact angle on the boundary of the region where the drop touches the surface. The hyperbolic free boundary problem with volume conservation constraint is solved by discrete Morse flow method. Moreover, a model taking into account both the surface and the liquid body is solved by combining discrete Morse flow and smoothed particle hydrodynamics method.
Contents
Contents ii
List of Figures iii
1 Introduction 1
2 Modelling of the surface of a droplet 6
2.1 A droplet on the plane . . . 6
2.2 A droplet on inclined plane . . . 14
3 Discrete Morse Flow Method 15 3.1 Mathematical formulation . . . 15
3.2 The extensions of the DMF method . . . 22
4 Smoothed particle hydrodynamics method 24 4.1 Introduction . . . 24
4.2 Fundamental formulation of SPH . . . 24
4.2.1 Kernel approximation . . . 24
4.2.2 Particle approximation . . . 26
4.2.3 Smoothing Kernels . . . 27
4.3 SPH Euler equations . . . 28
4.3.1 The momentum equation . . . 28
4.3.2 Conservation of Mass . . . 29
4.3.3 Particle positions . . . 29
4.3.4 Equation of State . . . 30
4.3.5 Boundary conditions . . . 30
4.3.6 Surface tension . . . 30
4.4 The Leap-Frog scheme . . . 31
Contents iii
5 Numerical Computation 33
6 Couple problem 38
6.0.1 The model of fluid . . . 38 6.0.2 The model of droplet motion . . . 39
7 Conclusion 44
A Finite element method 45
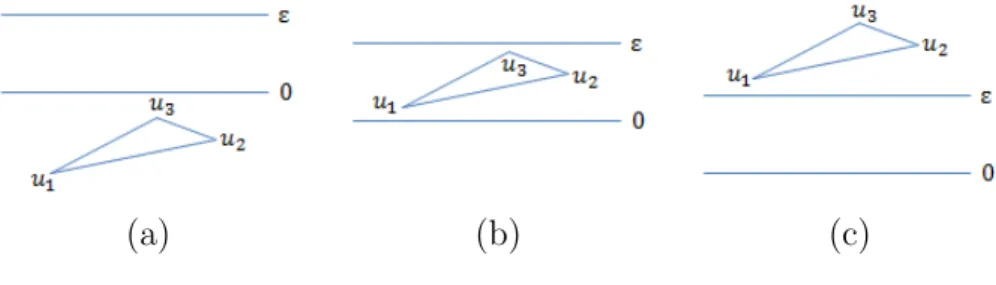
B Characteristic function 50
C Main scheme to find the minimizing sequence 53 C.1 Hyperbolic problem . . . 53 C.2 Hyperbolic with volume-constraint . . . 54 C.3 Hyperbolic with free boundary problem . . . 55
Acknowledgement 56
References 57
List of Figures
1.1 The equilibrium of droplet on plane. . . 1
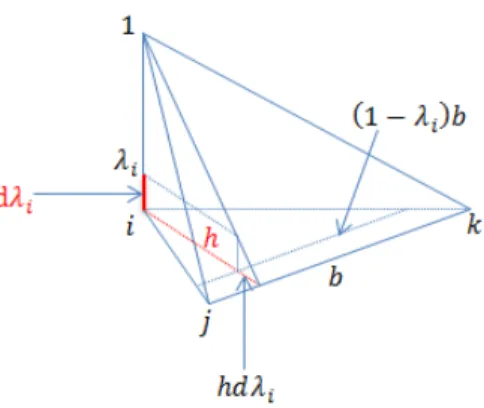
3.1 Interpolation of minimizers . . . 16
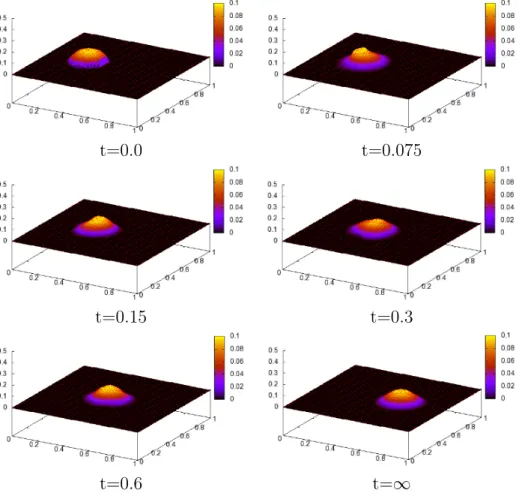
5.1 A droplet moving on plane by initial velocity. . . 36
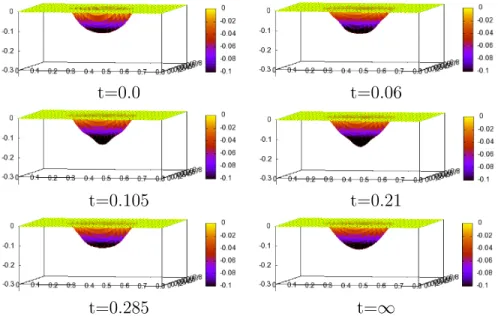
5.2 A droplet hanging on the plane. . . 37
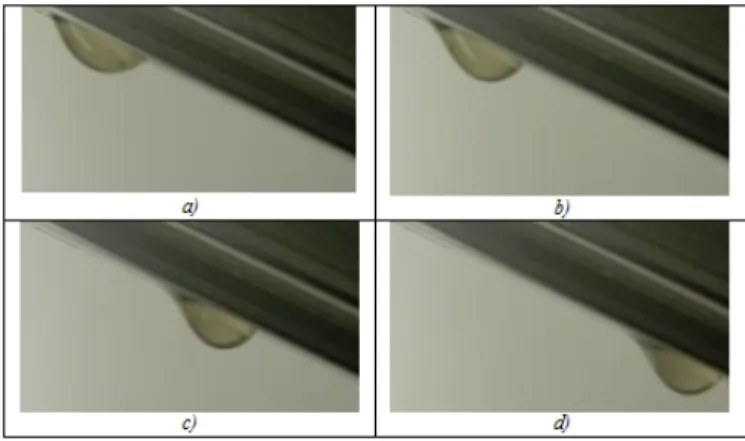
6.1 A droplet lying under inclined plane (experiment). . . 42
6.2 A droplet lying under inclined plane (simulation). . . 43
A.1 Shape function. . . 48
B.1 Case 1, 2 and 3. . . 50
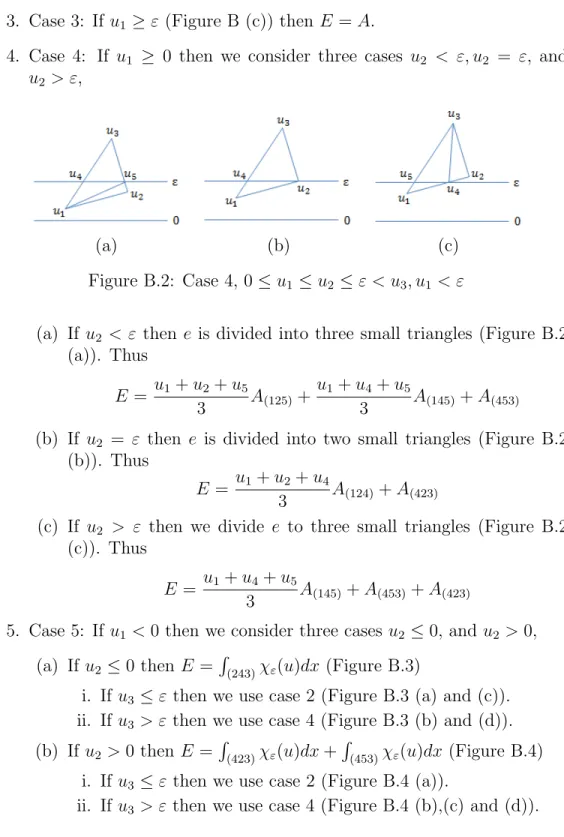
B.2 Case 4, 0≤u1 ≤u2 ≤ε < u3, u1 < ε . . . 51
B.3 Case 5, u1 < u2 ≤0< u3. . . 52
B.4 Case 5, u1 <0< u2 < u3. . . 52
Chapter 1 Introduction
In this study, we develop a simple model for the motion of a droplet on a plane, especially on an inclined plane. The hyperbolic free-boundary problem under the volume conservation constraint plays an important role in this model. The droplet consists of two parts: a film and liquid filling inside the film. The film must have constant volume, i.e, the volume of the region between the film and the underlying surface has to be constant in time.
Because of this point, we shall see that a complicated non-local term appears in the model equation. Furthermore, the positive contact angle is the main feature of the drop on plane. In the equilibrium case, the contact angle θ of the droplet depends on the properties of the liquid and the material on which the droplet is lying [19]. It is described by Young’s equation
γSG−γSL =γLGcosθ, (1.1) where γSG is the solid surface tension, γLG is the liquid surface tension, and γSL is the solid/liquid interfacial surface tension (Figure 1.1).
Figure 1.1: The equilibrium of droplet on plane.
In our work, θ <900 is consistently considered. Therefore, the shape of film can be described as a scalar function
u: (0, T)×Ω−→r,
where (0, T) is the time interval and Ω is the domain where the motion is considered. The set where the film touches the plane is referred as the free boundary. The resulting problem for the membrane is a free boundary equa- tion with a complicated nonlocal term. We shall obtain governing equation in Chapter 2. It has the following form
χu>0σutt =γg∆u−ρguχu>0−R2χ0ε(u) +λ. (1.2) This equation with initial conditions and boundary condition can be solved by the variational method, namely discrete Morse flow, which is explained in details in Chapter 3.
For fluid inside the film, we consider the fluid flow following the Euler equations
Dρ
Dt +ρ∇.v = 0, in ∪t∈(0,T)Ωf(t)× {t}, Dv
Dt =−1
ρ∇P +g, in ∪t∈(0,T)Ωf(t)× {t},
where v is the velocity, P is the pressure and g is the gravitation force.
These equations are solved by smooth particle hydrodynamic method. The liquid and the membrane interact in the model via pressure forces, therefore the outer force term plays an important roles in this case.
To continue this Chapter, Chapter 2 will present the model equation for the surface of the droplet, introducing the discrete Morse flow method which is described in details on the example of the hyperbolic equation in the Chapter 3. Chapter 4 represents the basic of smooth particle hydrodynamic method which uses to solve Euler equations. In Chapter 5, the discrete Morse flow is use to construct an approximation solution of the hyperbolic equation.
Chapter 6 introduces the couple model which combines the above mentioned hyperbolic equation for film and Euler equations for the fluid filling the film.
Chapter 7 draws important conclusions of the research and suggestions some recommendations for further studies.
Notations
We provide a list of notations used in the thesis
N natural numbers,
Rm m dimensional real Euclidean space (R=R1),
Ω bounded domain in Rm with Lipschitz boundary, corresponding to the spatial region, where the equation is solved,
∂Ω boundary of domain Ω,
|Ω| the Lebesgue measure of Ω, Ω closure of the set Ω,
T a positive real value representing the final time, QT the open time-space cylinder (0, T)×Ω,
V a positive real value representing the volume,
κ, κV sets of functions from certain spaces satisfying the volume con- straint,
u unknown function,
ut partial derivative u respect to time t (= ∂u∂t),
∇u gradient of u with respect to spatial variables (=
(ux1, ux2, . . . , uxm)),
4u the Laplace operator respect to space (= ∂∂x2u2 1
+ ∂∂x2u2 2
+. . .+∂x∂22u m), u|∂Ω the trace of uon ∂Ω,
u0, v0 initial data (shape and velocity, respectively),
λ Lagrange multiplier, nonlocal term originating in the volume con- straint,
h positive real value, time step of the discretization in time, a.e. means ”almost everywhere” or ”almost every”,
{u >0} set of point (t,x) from QT, for which u(t, x)>0,
χu>0 characteristic (or indicator) function of the set {u >0},
C denotes a generic positive constant, independent of parameters in equation,
Ωf the domain filled with fluid, v the velocity of fluid,
r the position of fluid,
n the unit outer normal vector of the membrane, g the gravitation force,
P the pressure of fluid, ρ the density of fluid,
σ the area density of membrane,
m the mass of fluid,
D
Dt material derivative = ∂t∂ +v.∇
, W the interpolating kernel,
c the sound speed,
C(Ω) continuous functions u: Ω−→R
Ck(Ω) functions u: Ω−→R that are k-times continuously differentiable, C∞(Ω) functions u: Ω−→R that are infinitely differentiable,
C0∞(Ω) functions C∞(Ω) with compact support
Lp(Ω) functionsu: Ω−→Rthat are Lebesgue measurable andkukLp(Ω) <
∞, where kukLp(Ω) = (R
Ω|u|pdx)1p,
L∞(Ω) functions u : Ω −→ R that are Lebesgue measurable and kukL∞(Ω)<∞, wherekukL∞(Ω) =ess supΩ|u|,
Wk,p(Ω) locally summable functions u : Ω −→ R such that for each mul- tiindex α with |α| ≤ k, Dαu exists in weak sense and belongs to Lp(Ω). The norm is defined as follows:
kukWk,p(Ω) =
X
|α|≤k
Z
Ω
|Dαu|pdx 1p
,
kukWk,∞(Ω)= X
|α|≤k
ess supΩ|Dαu|,
Hk(Ω) =Wk,2(Ω),
H01(Ω) the closure of C0∞(Ω) inH1(Ω),
Lp(0, T;X) measurable functionsu: [0, T]−→XwithkukLp(0,T;X) <∞, where kukLp(0,T;X) = (RT
0 kukpXdt)p1,
L∞(0, T;X) measurable functions u : [0, T] −→ X with kukL∞(0,T;X) < ∞, where kukL∞(0,T;X) =ess sup0≤t≤TkukX,
W1,p(0, T;X) functions u∈Lp(0, T;X) such thatutexists in the weak sense and belongs to Lp(0, T;X). The norm is
kukW1,p(0,T;X) = Z T
0
ku(t)kpX +kut(t)kpXdt 1p
,
W1,∞(0, T;X) functionsu∈L∞(0, T;X) such thatut exists in the weak sense and belongs to L∞(0, T;X). The norm is
kukW1,∞(0,T;X) =ess sup0≤t≤T(ku(t)kX +kut(t)kX),
H1(0, T;X) =W1,2(0, T;X),
C0∞(Ω;Rm) function u: Ω→Rm,with ui ∈C0∞(Ω), i= 1,2, .., m,
Chapter 2
Modelling of the surface of a droplet
Modelling of the motion of a droplet consists of two stages: deriving the model of the film representing the surface of the drop and deriving the model of the fluid inside the film. In this Chapter, we focus on the film model.
2.1 A droplet on the plane
In this case, we consider a droplet on a plane. For simplicity, we assume that the area density of the surface of the drop is constant and that the surface tension is homogeneous. In addition, the contact angle of θ < 90◦ is our consistent consideration.
Examining the equilibrium shape of the droplet is our starting point.
From the assumption of the contact angle being less than 900 the surface of the droplet can be described by the graph of scalar function below
u: Ω×(0, T)−→R,
where (0, T) is the time interval and Ω ⊂ Rm(m ∈ N\ {0}) is the domain where the motion is considered. The boundary∂Ω is assumed to be Lipschitz on which Dirichlet condition is prescribed. The film is assumed not to go under the plane. Moreover, the volume preservation of the film is crucial assumption
Z
uχu>0dx=V >0.
The surface energy of the stable droplet can be written as E =
Z
Ω
γgp
1 +|∇u|2χu>0dx+ Z
Ω
γsχu>0dx (2.1)
where γg =γLG, γs =γSL−γSG (Figure. 1.1).
If we assume that the minimizer exists and is smooth, we obtain the following result (see [15]).
Lemma 1. Let the minimizer of (2.1) be smooth in {u >0}. Then Young’s equation
γs =−γgcosθ hold on ∂{u >0}.
Proof. We denote
uε =V u+εϕ V +εΦ where Φ =R
Ωϕdx. Then we have 0 = lim
ε→0
1
ε(E(uε)−E(u))
= lim
ε→0
γg ε
Z
Ω
s
1 + |∇u+ε∇ϕ|2
(1 +εΦ/V)2χuε>0−p
1 +|∇u|2χu>0
dx + lim
ε→0
1 ε
Z
Ω
γs(χuε>0−χu>0)dx
=γg Z
Ω
∇u∇ϕ−V1|∇u|2Φ
p1 +|∇u|2 χu>0dx
=γg
Z
Ω
∇u∇ϕ
p1 +|∇u|2 − 1 V
|∇u|2 p1 +|∇u|2Φ
χu>0dx
=γg Z
Ω
∇u∇ϕ
p1 +|∇u|2 −λϕ
χu>0dx, where λ= V1 R
Ω
|∇u|2
√
1+|∇u|2dx.
Using Green’s theorem we have following form γg
Z
Ω
∇. ∇u p1 +|∇u|2
+λ
ϕdx= 0, ∀ϕ∈C0∞(Ω∩ {u >0}) (2.2)
On the other hand, we can carry out the so-called inner variation of (2.1), which uses the perturbation
uε = V
Vεu(τε−1(x)), where
τε(x) =x+εη(x), η∈C0∞(Ω,Rm) with Jacobian
|Dτε|= 1 +ε(∇.η) +o(ε), ε→0,
and Vε is determined so that the perturbation preserves volume:
Vε= Z
Ω
u(τε−1(x))dx= Z
Ω
u(y)|Dτε(y)|dy=V+ε Z
Ω
u(∇.η)dx+o(ε), ε→0.
Noting that if we denote
yi(x) =xi+εηi(x) then
∂yi
∂xj(x) =δij +ε∂ηi
∂xj(x)
∂xj
∂yi(y) =δji−ε∂ηj
∂xi(x) +o(ε), ε→0.
∂uε
∂yi(y) = V Vε
X
j
∂u
∂xj(x)∂xj
∂yi(y)
= V Vε
X
j
∂u
∂xj
(x)
δji− ∂ηj
∂xi
(x) +o(ε)
, ε→0
= V Vε
∂u
∂xi(x)−εX
j
∂u
∂xj
∂ηj
∂xi(x)
!
+o(ε), ε→0.
= V Vε
∂u
∂xi(τε−1(y))−εX
j
∂u
∂xj
∂ηj
∂xi(τε−1(y))
!
+o(ε), ε→0.
and employing the substitution x=τε−1(y), we have 0 = lim
ε→0
1
ε(E(uε)−E(u))
= lim
ε→0
γg ε
Z
Ω
s
1 + V2 Vε2
X
i
∂u
∂xi −εX
j
∂u
∂xj
∂ηj
∂xi 2
(1 +ε∇.η)−p
1 +|∇u|2
!
χu>0dx + lim
ε→0
1 ε
Z
Ω
(γs(τε)(1 +ε∇.η)−γs)χu>0dx
= lim
ε→0
γg ε
Z
Ω
2ε∇.η+ VV22 ε
|∇u|2−2εP
i,j
∂u
∂xi
∂u
∂xj
∂ηj
∂xi
(1 + 2ε∇.η)− |∇u|2 2p
1 +|∇u|2 χu>0dx
+ Z
Ω
γs(τε)−γs
ε +γs(τε)(∇.η)
!
χu>0dx
=γg Z
{u>0}
(1 +|∇u|2)(∇.η)− ∇uTDη∇u
p(1 +|∇u|2 −λu(∇.η)
! dx+
Z
{u>0}
∇.(γsη)dx.
Using Green’s theorem, we have Z
{u>0}
u(∇.η)dx=− Z
{u>0}
∇u.ηdx+ Z
∂{u>0}
u(η.ν)dS Z
{u>0}
∇.(γsη)dx=−0 + Z
∂{u>0}
γs(η.ν)dx Z
{u>0}
(1 +|∇u|2)(∇.η)
p(1 +|∇u|2 dx=− Z
{u>0}
∇uTD2uη p1 +|∇u|2dx+
Z
∂{u>0}
p1 +|∇u|2(η.ν)dS Z
{u>0}
∇u
p(1 +|∇u|2.∇(∇u.η)dx=− Z
{u>0}
∇. ∇u
p1 +|∇u|2
!
(∇u.η)dx +
Z
∂{u>0}
(∇u.η) ∇u.ν p1 +|∇u|2
! dS On the other hand, we have
Z
{u>0}
∇u
p1 +|∇u|2.∇(∇u.η)dx= Z
{u>0}
∇uTD2uη+∇uTDη∇u p1 +|∇u|2 dx
So we obtain Z
{u>0}
∇uTDη∇u
p1 +|∇u|2dx=− Z
{u>0}
∇uTD2uη p1 +|∇u|2dx−
Z
{u>0}
∇. ∇u
p1 +|∇u|2
!
(∇u.η)dx
+ Z
∂{u>0}
(∇u.η) ∇u.ν p1 +|∇u|2
! dS where ν =−|∇u|∇u is the unit outer normal to ∂{u >0}.
From these results, we get 0 =γg
Z
{u>0}
"
∇. ∇u
p1 +|∇u|2
! +λ
#
(∇u.η)dx
+ Z
∂{u>0}
γgp
1 +|∇u|2− |∇u|2 p1 +|∇u|2
+γs
!
(η.ν)dS, Using the result (2.2), which yields:
0 = Z
∂{u>0}
γgp
1 +|∇u|2− |∇u|2 p1 +|∇u|2
+γs
!
(η.ν)dS, ∀η∈C0∞(Ω,Rm).
We conclude that
γs =− 1
p1 +|∇u|2γg on ∂{u >0}, On the other the hand, we have tanθ =|∇u|, which yields
γs=−γgcosθ on∂{u >0}
We rewrite equation (2.1) as follows:
E = Z
Ω
γgp
1 +|∇u|2dx+ Z
Ω
(γg+γs)χu>0dx−γg|Ω|. (2.3) Now suppose that the gradient of u remains small (i.e, the deformation of the film is very small) then by Taylor expansion we have
p1 +|∇u|2 '1 + 1 2|∇u|2
Thus, we can write the approximation of the surface energy (2.3) in the form E˜ =
Z
Ω
γg
2 |∇u|2dx+ Z
Ω
R2χu>0dx (2.4)
where R2 =γg +γs. Potential energy of fluid surrounded by the film is ρg
Z
Ω
1
2u2χu>0dx,
whereρis the fluid density. On other hand, the kinetic energy of the vertical movement of the film is given by
Z
Ω
σ
2u2tχu>0 dx,
where σ is the area density of the surface. Therefore, the Lagrangian for the film can be written as
L(u, t) = Z
Ω
σ
2u2tχu>0− γg
2 |∇u|2−R2χε(u)−1
2ρgu2χu>0 dx,
whereχu>0 in equation (2.4) is replaced by a smoothing functionχε ∈C2(R) satisfying
χε(s) =
1, if s≥ε, 0, if s≤0
and |χ0ε(s)| ≤ C/ε for s ∈ (0, ε). The purpose of smoothing is to avoid the presence of delta function in the equation [15].
The equation of motion within time interval (0, T) can be defined by J(u) =
Z T 0
L(u, t)dt,
and the problem is determining the stationary point of functional J in the suitable function space satisfying the given volume constraint V >0.
Problem 1. Find the stationary state u of functional J(u) =
Z T 0
Z
Ω
σ
2u2tχu>0− γg
2|∇u|2−R2χε(u)− 1
2ρgu2χu>0
dxdt,
in the function space K =n
u∈H1(ΩT);u|∂Ω = 0, Z
Ω
uχu>0 =Vo ,
where u0(x) is the initial shape and v0 is the initial velocity of the film.
Let u be a stationary point of J. We select an arbitrary function ϕ ∈ C0∞((0, T)×(Ω∩ {u >0})), and denote
Φ(t) = Z
Ω
ϕ(t, x)dx.
uε= (u+εϕ) V V +εΦ. If A is denoted byA= V+εΦV then we obtain
ε→0limA= 1,
ε→0limAt = lim
ε→0
εVΦt
(V −εΦ)2 = 0,
ε→0lim dA
dε = lim
ε→0
VΦ
(V −εΦ)2 =−Φ V ,
ε→0lim d
dεAt =−Φt
V ,
ε→0lim d
dεA2 =−2Φ V ,
ε→0lim d
dε(AAt) =−Φt V ,
ε→0lim d
dεA2t = 0.
(2.5)
Thanks to above relations we can calculate the first derivative of each term
in functional J(u) :
ε→0lim d dε
Z T 0
Z
Ω
σ
2[(uε)t]2χu>0dxdt= Z T
0
Z
Ω
σh
utϕt− 1
V ut(utΦ +uΦt)i
χu>0dxdt
= Z T
0
Z
Ω
σh
−uttϕ− 1
V ut(uΦ)ti
χu>0dxdt
= Z T
0
Z
Ω
σh
−uttϕ+ 1
VuttuΦi
χu>0dxdt, limε→0
d dε
Z T 0
Z
Ω
γg
2|∇uε|2dxdt= Z T
0
Z
Ω
γg
∇u∇ϕ− 1
V (∇u)2Φ dxdt
= Z T
0
Z
Ω
γg
−∆uϕ− 1
V (∇u)2Φ dxdt, limε→0
d dε
Z T 0
Z
Ω
R2χε(uε)dxdt= Z T
0
Z
Ω
R2χ0ε(u) ϕ− 1 V uΦ
dxdt,
ε→0lim d dε
Z T 0
Z
Ω
1
2ρgu2εχu>0dxdt= Z T
0
Z
Ω
ρg uϕ− 1 V u2Φ
χu>0dxdt Since u is a stationary point, we have
0 = dJ(uε) dε
ε=0
= Z T
0
Z
Ω
−σuttχu>0+γg∆u−R2χ0ε(u)−ρguχu>0
ϕdxdt + 1
V Z T
0
Z
Ω
σuuttχu>0+γg(∇u)2+R2uχ0ε(u) +ρgu2χu>0
Φdxdt
= Z T
0
Z
Ω
−σuttχu>0+γg∆u−R2χ0ε(u)−ρguχu>0+λ
ϕdxdt where
λ= 1 V
Z
Ω
σuuttχu>0+γg(∇u)2+R2uχ0ε(u) +ρgu2χu>0
dx.
The strong version of the above formulation is as follows:
χu>0σutt =γg∆u−ρguχu>0−R2χ0ε(u) +λ. (2.6)
2.2 A droplet on inclined plane
In the case of a droplet on inclined plane with angleαabove equation becomes χu>0σutt =γg∆u−f χu>0 −R2χ0ε(u) +λ, (2.7) where f =ρg(ucosα−x1sinα),here x1 is the horizontal axis, and
λ = 1 V
Z
Ω
γg|∇u|2+f uχu>0+R2uχ0ε(u) +σuttuχu>0
dx.
Chapter 3
Discrete Morse Flow Method
This Chapter explains Discrete Morse Flow (DMF), the variational method used in this study to solve the problem that dependent on time with dif- ferential operators for space variables in divergence form. This method was first introduced by N. Kikuchi to solve parabolic problems [1], and also used to solve hyperbolic problems [2], [5]. One of the extensions of this method was used to solve free-boundary problems [3], [4]. Solving volume-preserving problems is the other extension of this method [6], [16]. Particularly, this method can be naturally applied to the free boundary problem with volume constraint in [14], [17].
In this case, we describe the details on the example of the hyperbolic equa- tion. The content in this part is based on [15].
3.1 Mathematical formulation
We consider a bounded domain Ω⊂Rnwith smooth boundary∂Ω, on which homogeneous Dirichlet boundary condition is given. Then, with a fixed initial position valueu0 ∈, H01(Ω), and initial velocity v0 ∈, H01(Ω) , we consider the problem:
utt(t, x) = ∆u(t, x), (t, x)∈ΩT = (0, T)×Ω, (3.1) u(t, x) = 0, (t, x)∈(0, T)×∂Ω, (3.2)
u(0, x) = u0(x), x∈Ω, (3.3)
ut(0, x) = v0(x), x∈Ω. (3.4)
First, we fix a large number N >0, determine the time step h=T /N.From the initial conditions, we define u−1 using a backwards difference u−1 = u0 −v0h. We then define un ∈ H01(Ω) for n = 1,2, .., N, to minimize the functional
Jn(u) :=
Z
Ω
|u−2un−1+un−2|2
2h2 dx+ 1
2 Z
Ω
|∇u|2dx (3.5) In this functional, we see that the first term is continuous in L2(Ω) and the second term is lower-semicontinuous with respect to sequentially weak con- vergence in H1(Ω). The existence of minimizers then follows immediately since the functional are bounded below for each n= 1,2, .., N.
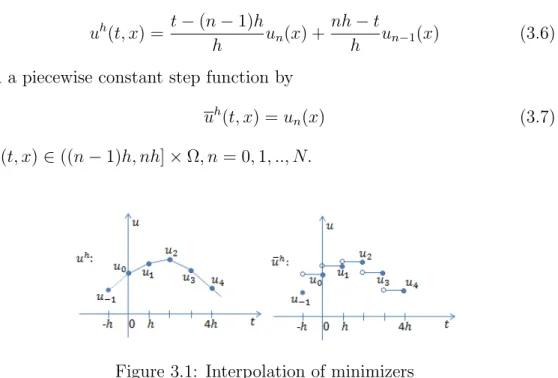
Next step, having obtained the existence of minimizers, we define their piecewise linear time interpolant by
uh(t, x) = t−(n−1)h
h un(x) + nh−t
h un−1(x) (3.6) and a piecewise constant step function by
uh(t, x) =un(x) (3.7)
for (t, x)∈((n−1)h, nh]×Ω, n= 0,1, .., N.
Figure 3.1: Interpolation of minimizers
Because un is a minimizer of Jn, the first variation of Jn at un vanishes.
Therefore, for any ϕ∈H01(Ω) we have
0 = d
dεJn(un+εϕ)|ε=0 = lim
ε−→0
Jn(un+εϕ)−Jn(un) ε
= lim
ε−→0
1 ε
Z
Ω
|un+εϕ−2un−1+un−2|2− |un−2un−1 +un−2|2
2h2 dx
+ lim
ε−→0
1 2ε
Z
Ω
(|∇un+ε∇ϕ|2− |∇un|2)dx
= lim
ε−→0
Z
Ω
(2un+εϕ−4un−1+ 2un−2)ϕ
2h2 + lim
ε−→0
1 2
Z
Ω
(2∇un∇ϕ+ε|∇ϕ|2)dx
= Z
Ω
un−2un−1+un−2
h2 ϕdx+
Z
Ω
∇un∇ϕdx (3.8)
As we defined for uh and uh in equation (3.7) and (3.6) we obtain:
Z
Ω
huht(t)−uht(t−h)
h ϕ+∇uh∇ϕi
dx= 0 for a.e. t∈(h, T) ∀ϕ∈H01(Ω).
(3.9) This relation satisfies with any ˜ϕ∈C([0, T]). Thus, we have:
Z T h
Z
Ω
huht(t)−uht(t−h)
h ϕ+∇uh∇ϕi
dxdt= 0 ∀ϕ∈L2(0, T;H01(Ω)).
(3.10) Now, we want to take limit of time step h to zero. However, we need some more estimate. We state it in the following Lemma.
Lemma 2. Suppose Ω is a bounded domain with smooth boundary. Let Jn, n = 2,3, .., N, be the functionals defined by (3.5) and let un be corre- sponding minimizers in H01(Ω). Define functions uh and uh by (3.7),(3.6) and assume h≤1. Then the following estimate holds
kuht(t)k2L2(Ω)+k∇uht(t)k2L2(Ω) ≤CE for a.e. t ∈(0, T) (3.11) where constant CE is defined in the proof and is independent of h.
Proof. We replace ϕin (3.8)by ϕ:=un−un−1. This yields Z
Ω
un−2un−1+un−2
h2 (un−un−1)dx+ Z
Ω
(∇un− ∇un−1)∇undx = 0.
Using the inequality a2
2 − b2
2 ≤(a−b)a,∀a, b∈R for two term of this, we get
Z
Ω
h un−un−1
h 2
− un−1−un−2
h
2
+|∇un|2− |∇un−1|2i
dx≤0 Z
Ω
h un−un−1
h 2
+|∇un|2i dx≤
Z
Ω
h un−1−un−2
h
2
+|∇un−1|2i dx.
Since these inequalities are summed from n = 1 to k≤N. Thus, we obtain Z
Ω
h uk−uk−1
h 2
+|∇uk|2i dx ≤
Z
Ω
h u0−u−1
h 2
+|∇u0|2i dx
= Z
Ω
h
(v0)2+|∇u0|2i dx
= kv0k2L2(Ω)+k∇u0k2L2(Ω).
We knowuht(t) = uk−uhk−1 and∇uk=∇uht fort∈((k−1)h, kh), k = 0,1, .., N, then we get the estimate (3.11).
Thanks to the estimate(3.11), we can apply the theorem by Eberlein and Shmulyan to extract a subsequence {∇uhk}k∈N which converges weakly in L2(QT) to the function v. From the sequence {hkl}l∈N so that {uhtkl}l∈N
converges weakly in L2(QT) to a function U. In the sequence, we often use this logic but we shall omit this lengthy explanation and subscripts, and simply write
∇uht * v in (L2(QT))m, (3.12)
uht * U inL2(QT). (3.13)
We should now show that there is a function u∈ L2(0, T;H01(Ω)) such that v = ∇u and U = ut in L2(QT). To this end, a more detailed analysis is needed. First, we estimate the norm of the difference of the approximate
functions uh and uh. Lett ∈((n−1)h, nh).Then kuh(t)−uh(t)k2L2(Ω) =
Z
Ω
(uh−uh)2dx
= Z
Ω
un− t−(n−1)h
h un−nh−t h un−1
2
dx
= Z
Ω
nh−t h
2
(un−un−1)2dx
≤ Z
Ω
(un−un−1)2dx=h2 Z
Ω
(uht)2dx
≤ CE2h2. This means that
kuh−uhkL2(Ω) ≤Ch for a.e. t ∈(0, T).
We have further
kuhk2L2(QT)− kuhk2L2(QT) = Z T
0
Z
Ω
(((uh)2−uh)2)dxdt
=
N
X
n=1
Z nh (n−1)h
Z
Ω
h t−(n−1)h
h un− nh−t
h un−12
−u2ni dxdt
=
N
X
n=1
Z
Ω
− 2h
3 u2n+ h
3unun−1+h 3u2n−1
dx
≤ h 6
N
X
n=1
Z
Ω
(−4u2n+u2n+u2n−1+ 2u2n−1)dx
= h
2
N
X
n=1
Z
Ω
(−u2n+u2n−1)dx= h 2
Z
Ω
(u20 −u2N)dx
≤ h
2ku0k2L2(Ω). In the same way we also get
k∇uhk2L2(QT)− k∇uhk2L2(QT)≤ h
2k∇u0k2L2(QT).
Finally, from Poincare’s inequality we know that there is a universal constant CP so that
kuhkL2(QT) ≤CPk∇uhkL2(QT) for all h ∈(0,1). (3.14) We have obtained some results for future use. The results of the following Lemma rely only on the interpolations (3.7) and (3.6). The results are also independent of the problem under consideration and a fact frequently used later on.
Lemma 3. Let uh and uh be defined by (3.7) and (3.6). Then the following relations hold.
kuh−uhkL2(Ω) ≤hkuhtkL2(Ω) for a.e. t∈(0, T), (3.15) kuhk2L2(QT) ≤ kuhk2L2(QT)+h
2ku0k2L2(Ω), (3.16) k∇uhk2L2(QT)≤ k∇uhk2L2(QT)+h
2k∇u0k2L2(Ω). (3.17) Now, (3.11), (3.17) and (3.14) imply that uh is uniformly bounded in H1(QT). Therefore, there is a weakly convergent subseguence in H1(QT) and, by Rellich theorem, a strongly converging subsequence in L2(QT). Let us denote the cluster function as u:
uh * uweakly inH1(QT) (3.18) Because of (3.13), U = ut holds almost everywhere. Moreover, from (3.12) for any ϕ∈C0∞(QT)
Z T 0
Z
Ω
∂uh
∂xi − ∂uh
∂xi
ϕdxdt→ Z T
0
Z
Ω
vi− ∂uh
∂xi
ϕdxdt as h→0+, while at the same time
Z T 0
Z
Ω
∂uh
∂xi
−∂uh
∂xi
ϕdxdt=− Z T
0
Z
Ω
(uh−uh)∂ϕ
∂xi
dxdt→0 as h→0+, by (3.15). This means that v=∇ualmost everywhere in QT.
We have shown in this way that there is a function u∈H1(QT), such that
∇uh *∇u in (L2(QT)m) (3.19)
uht * ut inL2(QT) (3.20) Now, we can pass to limit in (3.10) ash→0 +.We shall, for the time being, consider a test function ϕ belonging to C0∞([0, T]×Ω). To begin with, we have
h−→0lim Z T
h
Z
Ω
∇uh∇ϕdxdt (3.21)
= lim
h−→0
Z T 0
Z
Ω
∇uh∇ϕdxdt− lim
h−→0
Z h 0
Z
Ω
∇uh∇ϕdxdt (3.22)
= Z T
0
Z
Ω
∇u∇ϕdxdt (3.23)
because the boundeness (3.11) of ∇uh:
Z h 0
Z
Ω
∇uh∇ϕdxdt ≤
Z h 0
Z
Ω
|∇uh|2dx
1/2Z
Ω
|∇ϕ|2dx 1/2
dt
≤ Z h
0
pCECdt=Ch−→0. ash →0 +. Moreover, for the first part of (3.10) we have:
Z T h
Z
Ω
uht(t)−uht(t−h)
h ϕdxdt
= Z T
h
Z
Ω
uht(t)
h ϕ(t)dxdt− Z T−h
0
Z
Ω
uht(t)
h ϕ(t+h)dxdt
= Z T
0
Z
Ω
−uht(t)
h (ϕ(t+h)−ϕ(t))dxdt− Z h
0
Z
Ω
uht(t)
h ϕ(t)dxdt +
Z T T−h
Z
Ω
uht(t)
h ϕ(t+h)dxdt (3.24)
Such that for h−→0, by using integration by part, we obtain:
h−→0lim Z T
h
Z
Ω
uht(t)−uht(t−h)
h ϕdxdt=
Z T 0
Z
Ω
−ut(t)ϕt(t)dxdt− Z
Ω
v0ϕ(0)dx (3.25) The convergence is deduced from the following facts:
1. in the first term of (3.24), uht converges weakly and (ϕ(t)−ϕ(t+h))/h converges strongly in L2(QT);
2. in the second term,uht = (u1−u0)/h=v0 for t∈(0, h);
3. in the third term, ϕ(t+h) = 0 for t∈(T −h, T);
Finally, we get that:
Z T 0
Z
Ω
(−ut(t)ϕt(t)+∇u∇ϕ)dxdt−
Z
Ω
v0ϕ(0, x)dx= 0 ∀ϕ∈C0∞([0, T]×Ω) (3.26) Noting that the space of functions fromH1(QT) with zero trace on ({0}×Ω)∪
([0, T]×∂Ω) is a closed linear subspace of H1(QT) and, therefore, weakly closed by Mazur’s theorem, we conclude by (3.18) that u belongs to this space. Consequently, u satisfies boundary condition (3.2) and initial condi- tion (3.3) in the sense of traces. We remark that the convergence of traces follows also from the compactness of the trace operatorT :H1(Ω) →L2(∂Ω).
Moreover, from [8] it follow that u, as a function from H1(0, T;L2(Ω)), be- long to C([0, T];L2(Ω)). Thus, the initial condition (3.3) is satisfied even in the strong sense.
To summarize, we have proved by the discrete Morse flow method that there exist a weak solutionu∈H1(Qt) to problem (3.1)-(3.4) in the sense of (3.26), satisfying boundary and initial condition (3.2),(3.3) in the sense of traces.
3.2 The extensions of the DMF method
The DMF method can be naturally applied to problems with volume-constraint and free-boundary problems [15].
For hyperbolic problem with volume-constraint, we cite a result from [20]
Theorem 1. Let us consider the following hyperbolic problem:
utt(t, x) = ∆u(t, x) +λ(u), (t, x)∈ΩT = (0, T)×Ω, (3.27) u(t, x) = 0, (t, x)∈(0, T)×∂Ω, (3.28)
u(0, x) = u0(x), x∈Ω, (3.29)
ut(0, x) = v0(x), x∈Ω. (3.30)
where λ(u) = V1 R
Ω(uttu+|∇u|2)dx.
Let T > 0 and Ω be a bounded domain in Rm with Lipschitz continuous boundary ∂Ω. We assume thatg ∈L2(∂Ω) but put here g = 0 for simplicity.
Further u0, v0 belong to H1(Ω) satisfy the compatibility conditions u0(x) = g(x), v0(x) = 0 for x ∈ ∂Ω and R
Ωu0dx = V,R
Ωv0dx = 0. Then there is a weak solutionu∈H1(0, T;L2(Ω))∩L∞(0, T;H01(Ω)) satisfying the condition of constant volume, u(0) =u0 and the following identity for all test function ϕ∈C0∞([0, T]×Ω) with Φ =R
Ωϕdx Z T
0
Z
Ω
(−utϕt+∇u∇ϕ)dxdt− Z
Ω
v0ϕ(0)dx
= 1 V
Z T 0
Z
Ω
(−ut(uΦ)t+|∇u|2Φ)dxdt− 1 V
Z
Ω
u0v0Φ(0)dx.
For a volume-constrained free boundary hyperbolic equation in one space dimension we cite a result from [17]
Theorem 2. Let us consider the following hyperbolic problem:
χu>0utt = ∆u−f(u) +λχu>0(u), (t, x)∈ΩT = (0, T)×Ω,(3.31) u(t, x) = 0, (t, x)∈(0, T)×∂Ω, (3.32)
u(0, x) = u0(x), x∈Ω, (3.33)
ut(0, x) = v0(x), x∈Ω. (3.34)
where λ(u) = V1 R
Ω(uttu+f(u)u+|∇u|2)dx.
Let Ω ⊂ R be a domain with Lipschitz boundary and T > 0 a given final time. Assume that f(t, x, u) is continuous in the variable u and satisfies
|f(t, x, u)| ≤Cf(u) + Γ(t, x) for some small constant Cf and a nonnegative Γ ∈ L2((0, T)×Ω). Further, assume that initial data u0 and v0 belong to H01(Ω) satisfying the compatibility conditions R
Ωu0dx=V,R
Ωv0dx= 0. Then there exists a weak solution in the following sense.
A function u∈H1(0, T;L2(Ω))∩L∞(0, T;H01(Ω)) is called a weak solution if u(0, x) =u0, if u= 0 outside {u >0} and if the following identity holds for all ϕ(t, x)∈C0∞([0, T]×Ω∩ {u >0})and an arbitrary u(t, x)˜ ∈C0∞([0, T]× Ω∩ {u >0}) satisfying R
Ωu(t, x)dx˜ =V : Z T
0
Z
Ω
(−utϕt+∇u∇ϕ+f(u)ϕ)dxdt− Z
Ω
v0ϕ(0)dx
= 1 V
Z T 0
Z
Ω
(−ut(˜uΦ)t+ (∇u∇˜u+ ˜uf(u)Φ)dxdt− 1 V
Z
Ω
˜
u0v0Φ(0)dx.
where Φ(t) denotes R
Ωϕ(t, x)dx and u˜0 = ˜u(0, x).
Chapter 4
Smoothed particle
hydrodynamics method
4.1 Introduction
Smoothed particle hydrodynamics (SPH) was invented to simulate astro- physical phenomena in astrophysics. This method has been widely studied and extended for applications to problems of continuum in solid and fluid mechanics [12]. The main feature of SPH method is to replace the equations of fluid dynamics by equations for particles. In this chapter, we shall show how a continuous field can be mapped on to a series of discrete particles.
Then, we show how derivatives may be calculated.
4.2 Fundamental formulation of SPH
In order to derive the formulation of SPH, we consider two steps. The first step is the integral representation or kernel approximation of field functions.
The second one is the particle approximation.
4.2.1 Kernel approximation
To obtain kernel approximation of a (scalar) functionf(r),the trivial identity is considered the starting point
f(r) = Z
f(r0)δ(r−r0)dr0, (4.1)
f(r) denotes a function of position vector r, δ(r −r0) is the Dirac delta function, and Ω is the volume of the integral that contain r.
If we replace Delta function by a smoothing functionW(r−r0, h), the kernel approximation of f(r) is given by
< f(r)>=
Z
Ω
f(r0)W(r−r0, h)dr0. (4.2) The smoothing function W is usually chosen to be an even function. It should satisfy a number conditions, such as
The normalization condition:
Z
Ω
W(r−r0, h)dr0 = 1, (4.3) Delta function property:
h→0limW(r−r0, h)dr0 =δ(r−r0) (4.4) Compact condition:
W(r−r0, h) = 0 (4.5)
when |r −r0| > κh where κ is a constant related to smoothing function for point at r, and defines the effective (non-zero) area of the smoothing function. This effective area is called the support domain for the smoothing function of point r (or the support domain of that point).
Using the Taylor series expansion of f(r0) around r0, where f(r) is dif- ferentiable, we obtain following relation [12]:
< f(r)>=f(r) +O((r0−r)2) (4.6) Thus, the kernel approximation of a function is of second order accuracy in SPH method.
The gradient of a scalar function can be naturally calculated by taking the spatial derivative of equation (4.2):
<∇f(r)>=
Z
Ω
∇0f(r0)
W(r−r0, h)dr0. (4.7)
where ∇ and ∇0 are gradients with respect to r and r0, respectively. When we ignore the surface term, integrating by parts of (4.7) we obtain
<∇f(r)>=
Z
Ω
f(r0)∇W(r−r0, h)dr0. (4.8) Similarly, the kernel approximation of the derivative of a vector fieldf(r) is given by
<∇.f(r)>=
Z
Ω
f(r0).∇W(r−r0, h)dr0. (4.9)
4.2.2 Particle approximation
The continuous integral representations can be converted to discretized forms of summation over all the particles in the support domain. This process is carried out as follows.
At position j, we use the finite volume of the particle 4Vj to replace the infinitesimal volume dr0, and mass of particle at this point is given by mj =4Vjρj where ρj is the density of particle j. Thus,
< f(r)>= Z
Ω
f(r0)W(r−r0, h)dr0 'X
j
f(rj)W(r−rj, h)4Vj
=X
j
mj
ρj f(rj)W(r−rj, h) or
< f(r)>=X
j
mj ρj
f(rj)W(r−rj, h) (4.10) The particle approximation for a function at particle i can finally be written as
< f(ri)>=X
j
mj ρj
f(rj)Wij (4.11)
where
Wij =W(ri−rj, h)
By using the same way, the particle approximation for the spatial deriva- tive of the (scalar) function is
<∇f(r)>=X
j
mj
ρj f(rj)∇W(r−rj, h) (4.12) To obtain higher accuracy, the particle approximation would be done by writing [9]:
ρ∇A=∇(ρA)−A∇ρ
In summary, the particle approximation for the spatial derivative of the function at particle i can finally be written as
<∇f(ri)>= 1 ρi
X
j
mj[f(ri)−f(rj)]∇iWij (4.13) where
∇iWij = ri−rj rij
∂Wij
∂rij
= rij rij
∂Wij
∂rij
In the case of vector field, the particle approximation for the spatial derivative at particle ican be given by:
<∇.f(ri)>= 1 ρi
X
j
mj[f(ri)−f(rj)].∇iWij (4.14)
4.2.3 Smoothing Kernels
There are many different commonly used smoothing functions that have been implemented in SPH method. In this study we use cubic spline kernel which is defined as
W(r, h) = 1 πh3
1−1.5x2+ 0.75x3, if 0≤x <1.
0.25(2−x)3, if 1≤x≤2 0, if 2≤x
(4.15) where x= hr.
The gradient of the kernel is well defined for all values of x, such that
∂W(r, h)
∂r = 1
πh4
−3x+ 2.25x2, if 0≤x <1.
−0.75(2−x)2, if 1≤x≤2 0, if 2≤x
(4.16)
∇W(r, h) = r r
∂W(r, h)
∂r , r=|r|