指導教員
修士論文
H.265/HEVC に対応する 粗密階層型の動き検出法の研究
近 藤 利 夫 教 授
平成
26
年度三 重 大 学 大 学 院 工 学 研 究 科 情 報 工 学 専 攻 計算機アーキテクチャ研究室
内容梗概
動画像通信の分野で従来の解像度の
1 6
倍となるスーパーハイビジョン放送の開始が予定 されているなど高解像度動画像の符号化の需要が近年増加している.この高解像度化によ るデータ量増大に対応するために圧縮率が従来の2
倍に高められた新しい動画像圧縮規格H. 26 5/HEVC
が2 0 1 3
年に規格化されており,スーパーハイビジョン放送で使用さ れる見通しである.このため新規格であるH. 26 5/HEVC
に対応する高速,高圧縮 率,高精度を両立した動き検出アルゴリズムが必要である.しかし,ソフトウェアエンコ ーダで広く利用されている探索範囲内を疎らに探索する探索高効率化手法では並列化が困 難なためハードウェア化により要求を満たすことはできない.そこで本研究では各階層で 密な探索を並列化が容易な粗密階層型探索法をベースとしたH.265/HEVC
向きの 動き検出アルゴリズムを追及した.H. 2 6 5/HEVC
では動き補償のブロックサイズ の範囲が最少の8 x 4 ( 4 x 8 )
から最大の6 4 x 6 4
までと大幅に広がっている.ブロックサイズに より探索特性が大きく異なってくるため,動き検出の高精度・効率化にはブロックサイズ に応じた探索アルゴリズムを適応的に切り替えることが必要になる.この考えに基づき,階層数はブロックサイズに応じて変更する手法を提案した.この提案法は,大ブロックは
4
階層,中ブ、ロックは3
階層の粗密階層探索を実行し,小ブロックは階層無しで、近傍をフル サーチで探索する.大,中ブロックの1階層目ではサンプリングされた画像を用いて広範
囲をフルサーチで探索し,その後は各階層で追跡型スクエアサーチを実行する.一階層目 は組いサブサンプリング画像を用いるフルサーチであり演算量が少なく,二階層目以降の 追跡型スクエアサーチでは近傍のみ探索することで低演算量と高メモリアクセス効率の両 立をはかる.このためハードウェアによる並列処理に適しており,高速化が容易と考えら れる.この提案アルゴ、リズムをH. 2 6 5/HEVC
参照ソフトウェアHM8. 0
に組み込み評価を行った.比較対象として HM~こ組み込まれているアルゴリズム TZSearc
h
を使用した.2
種の8 9 2 x 4 8 0
画像と12
種のH D ( 1 9 2 0 x 1 0 8 0 )
画像を使用し3 0
フレー ムのエンコードを行った,平均結果は提案するアルゴリズムはBitRate
で約2.2%
の 上昇,画像品質を表すPSNR
で0 . 0 0 2 d B
の減少となった.この程度の符号化効率低下で あれば実用上の問題はないといえる.•
A b s t r a c t
Due t o the growing p o p u l a r i t y of h i g h d e f i n i t i o n video images
,8k and 4k video having 16 times and 4 times the r e s o l u t i o n s
,r e s p e c t i v e l y
,o f current f u l l h i g h ‑ d e f i n i t i o n are s t a n d a r d i z e d .
I n order t o reduce the enormous amount of data due t o t h e i r very h i g h r e s o l u t i o n
,i t i s necessary to use the H.265/HEVC video coding standard w i t h h i g h compression e f f i c i e n c y .
However
,H.265/HEVC r e q u i r e s s i g n i f i c a n t computing power so that i t i s d i f f i c u l t to perform r e a l ‑ t i m e e n c o d i n g .
Dedicated hardware implementation i s e s s e n t i a l to s o l v e t h i s problem
,so that an LSI f o r H.265/HEVC encoder LSI f o r h i g h ‑ d e f i n i t i o n images i s r e q u i r e d t o be developed.
I t i s important to reduce the s c a l e o f the motion e s t i m a t i o n c i r c u i t f o r a c o s t ‑ e f f e c t i v e encoder LSI because motion e s t i m a t i o n complexity occupies most o f the encoding c o m p l e x i t y .
Aiming a t a hardware‑oriented motion e s t i m a t i o n a l g o r i t h m f o r H.265
,we focus on the v a r i a b l e block s i z e of which ranges has been extended t o 64x64 i n
H.2 6 5 . We employ s u i t a b l e search methods and block matching corresponding to the b l o c k s i z e f o r h i g h e f f i c i e n c y of search o p e r a t i o n .
We propose a n o v e l search method that can switch search method according to the number o f l a y e r s i n the h i e r a r c h y or the block s i z e .
The r e s u l t o f b i t r a t e i s 2 . 2
弘upcompare than TZSearch
,and PSNR O.004dB down
,f o r 14 t e s t
sequences.
目次
1. はじめに....・H・....・H・........・H・…...・H ・...・H ・.....・H・‑…....・H・‑…・ ….....・H ・‑…...・H ・...・H・H・H・.....・H・
. 1
1.
1
背景....・H・‑…. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 .
動き検出ハードウェアの研究動向....・H・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 . 1
動き検出の概要....・H・‑…....・H・‑…............................ー・・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2
高速化の取り組み状況.……. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3
拡大型探索.……....・H・....・H・....・H・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2
.4追跡型探索....・H・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 . 5 H.264/AVC
まで、の動き検出ハードウェアの研究開発状況....・H・...・H・H・H・‑…H・H・....・H ・‑…7 2 . 6
スーパーハイビジョン放送…・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 . 7 H.265/HEVC
...・H ・.....・H・..……...・H・H・H ・.....・H・.....・H ・..………………...・H ・.....・H・.....・H ・.....・H・. 8 3 .
高速化の課題…...・H・....・H ・‑…….....・H・‑…....・H・‑…. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 0 3 . 1
高効率,高並列化の両立..............................................................................................日3.2
多様化した可変ブロックサイズへの対応. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 0 4 .
提案手法・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ー・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1
4 . 1
方向性. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1 4 . 2
画像のサブサンプリ ング.…・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ーー・・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 1
4.3
サブサンプリングされた画像を用いてのフルサーチ…...・H・‑…・・H・H・‑…H・H・‑…H・H・‑…. 1 3 4
.4追跡型スクエアサーチ…・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 3
4 . 5
その他…・.......................................................................................................................日4 . 6
祖密階層型探索. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 6 5 .
性能評価....・H・....・H・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 7 5 . 1
実装....・H・‑…....・H・....・H・..................................................................................................口5 . 2
評価方法....・H ・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 7 5 . 3
使用画像について....・H・....・H・‑…. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 8 5
.4評価結果. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 1 5 . 5
考察.…・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 3
6 .
結論....・H・....・H・‑…. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 6
7 .
今後の課題…・…...・H・....・H・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 7
8 .
おわりに....・H・....・H ・‑…....・H・‑…. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 7
謝辞.......................................................................・・・・・・ーーーー. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 8
参考文献....・H・‑…....・H ・‑…....・H・....・H ・....・H・‑…. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 9
図目次
図 1 ‑ 1
動画像の高精細化. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
図 2
・1
時間的連続.…....・H・....・H ・‑…・…….....・H・・・H・H・‑…. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
図 2
・2
動き検出処理.…....・H・‑…. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
図 2
・3符号化画像のブロック分割の例.… . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
図
2
圃4.TZSearch
の探索ブロックの1
例….....・H・‑…....・H・‑………H ・H ・..…H ・H ・....・H・...・. . . 6
図
2
・5H.264/AVC
における動き検出時に使用ブロックサイズ……H・H・.....・H ・‑……....・H・. 9
図2
・6H.265/HEVC
における動き検出時に使用ブロックの抜粋…・・…・・H・H・...・H・....……. 9
図 十 1
画像のサブサンプリング….. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 2
図 4
・2
画像のサブサンプリング.….. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 2
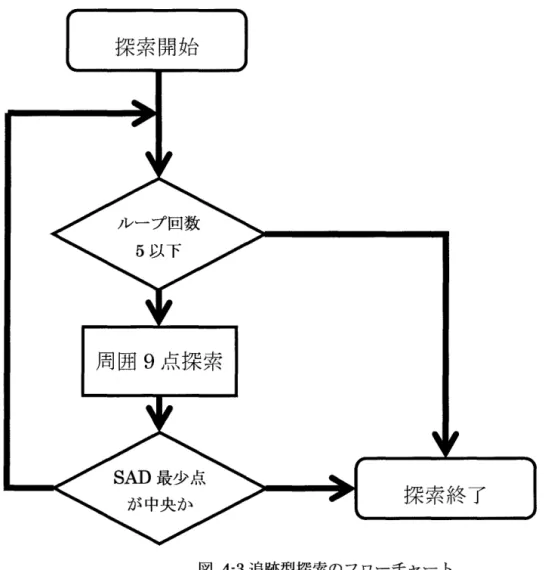
図4 ‑ 3
追跡型探索のフローチャート.……...・H・. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 4
図4
・4
スクエアサーチの探索点....・H ・‑……..…‑….............................................................日 図4
・5
粗密階層探索フローチャート.............................................................................打図 5
・lSAD
演算回数比較結果・・・・・・・・・・・・・・・・・・・・・ーー・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・. . . 2 5
表目次
表 2
・1
各放送に使用されている(必要な)ビットレート.…....・H ・‑…....・H・‑…....・H・‑…・…..4表 5 ‑ 1
実行環境....・H・‑……・・…・・H・H・....・H・‑…....・H・....・H・‑…...・H・‑……H・H・H・H・‑…....・H・...・H・‑…1 8
表 5
幽2
提案手法評価結果.…・……・…....・H・‑…....・H・‑…....・H・‑…...・H ・.....・H・‑…H ・H・‑…...・H・...・. . . 2 1
表 5 ‑ 3TZSearch
評価結果・・…. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 2
表 5 ‑ 5
提案手法とTZSarch
の比較結果.…. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 6
1 . はじめに
1 . 1
背景図
1
・1
のようにハイビジョンの4
倍,1 6
倍となる4K
,8 K
(スーパーハイビジョン) の放送開始を見据え,動画像符号化規格のH.265 眉 EVC
が2013
年に標準化されている.この
H. 265
による高精細動画像の実時間符号化では,構成画素の増大と圧縮処理の複 雑化により処理量が大幅に増加するために,符号化装置のコスト低減が喫緊の課題となっ ている.このコスト低減の実現には,符号化処理量の大半を占め処理量増大の主因となっ ている動き検出処理の効率を高める必要がある.このような状況の中,TZSearch
のような追跡型の動き探索手法が提案され,H.265/HEVC
の参照ソフトウェアH M
をはじ めとする種々のソフトウェアエンコーダに搭載されている.遠隔の点ほど疎らになる探索 パターンの中心を直前の探索の最少S A D
点に持ってくるパターン内探索を繰り返し,条 件を満たした時点で探索を打ち切ることで、探索点数を最小限に抑えようとする手法である.高い探索精度と低演算量を両立できるものの,探索点が不規則かっ疎らになるため並列化 が難しいのに加え,参照画像の再利用性も低いことからプロセッサ・メモリ問の転送がボ
トルネックとなるため,ハードウェア化による実時間処理には適していない.
一方,
H.265 圧 IEVC
では動画像の符号化の際に最も重要となる動き検出部での探索ブロ ックサイズが従来規格のH.264/AVC
と比較しサイズの種類が増加している.従来[ 1 ][ 2 ] 4 x 4
から16x16
といった限られたサイズで、あったが,H.265
では4 x 8 ( 8 x 4 ) ‑ ‑ ‑ ‑ 6 4 x 6 4
となり大き なブロックサイズを利用して動き検出を行うことが可能となっている.大ブロックでは構 成画素が大きくサブサンプリングで多くの画素を間引し、たとしても動き検出に用いるだけ の十分な構成画素が残る, しかしながらブロックが小さくなればなるほどサブサンプリン グする度に構成画素が減少してしましい十分な動き検出能力を得られなくなる.サブサン プリングで画素を間引けば間引くほど同範囲の探索時の演算量が減少するため,可能な限 りサブサンプリングを行う必要がある.そのため従来の構成画素をあまり間引かなし1小ブ ロックサイズを想定したアルゴリズムではなく,構成画素を大胆に間引く大ブロックサイ ズの利用を考慮したアルゴ、リズムが必要である.低演算量で広範囲を探索する手法に,粗いサブサンプリング画像の探索結果を,より密 度を高めたサブサンプリング画像の探索で高精度化する階層探索がある.広めの探索範囲 を矩形に設定することで高並列処理と参照画像の高再利用率を両立できる利点を有してい る.また
64x64
までの大サイズのブロックを使用できるようになったH. 265
では従来 以上の階層数を使用しでもブロックマッチングの精度確保に必要な構成画素数が確保できまで階層数を高めて演算量を抑える.一方,小ブロックの場合はサブサンプリング無しで 近傍のみの探索を実行することで演算量を削減する.これは小ブロックにおいては構成画 素数が減り探索精度が著しく低下してしまうのと,近傍ベクトルに移動ベクトルが存在す る確率が高いという性質があるためである.
これらの戦略に基づいて,スーパーハイビジョンに対応する
H. 265
に適した階層探 索法を開発する.2
章では現在の動き検出に関する研究について述べる.3
章で、は現在の高速化の課題につ いて述べる.4
章で、は本論文の提案手法について述べる.5
章では実験方法と実験結果につ いて述べる.6
章では結論を述べる.7
章で、は今後の課題について述べる.8
章では本論文 の統括を行う.スーパーハイビジョン 8K
フノレハイビジョン
(1920xl080)
( 7 6 8 0 x 4 3 2 0 )
図
1 ‑ 1
動画像の高精細化2 . 動き検出ハードウェアの研究動向
2 . 1動き検出の概要
テレビ放送やインターネットでの映像配信において高精細画像の供給が進んでいる. し かし高精細画像になればなるほどそのデータ量も増大し,現在のフルハイビジョン放送
(1920x1080)
からスーパーハイビジョン8K (7680x4320)
の映像データのみで1 6
倍の 量となっている.表
2 ‑ 1のように現在使用されている放送ピットレートは地上デジタルハイビジョン放送
で15Mbps
であり,B S
デジタルハイビジョン放送だとしても23Mbps
で放送が行われて いる.そのため単純計算で8 K
スーパーハイビジョン放送を実現するには従来の放送帯域1 6
チャンネル分が必要となる.そうなると放映チャンネル数が削減を余儀なくされるため 圧縮率を向上させる必要がある.そのため既存の情報インフラでスーパーハイビジョン放 送を行うことは困難な状況である.そうなるとその膨大なデータ量はスーパーハイビジョン放送普及のための妨げになる.そのため映像データを符号化によって圧縮することでデ ータ量を削減し,スーパーハイビジョン放送を容易に行える環境を作り出す必要がある.
テレビ放送などで使われている動画像は図
2 ‑ 1
のように1
秒間に30
枚または60
枚の画 像をパラパラマンガのようにして画面に映し出すことであたかも映像が動いているように 見せている.そしてこの時間的に隣接する画像同士の差はごく僅かである.この時間的に 隣接する画像の類似性が極めて高いという性質を利用して参照画像から動きベクトルを取 り出し,それを用いて符号化することで品質を犠牲にせずに高い圧縮率を実現している.この際にフレーム聞の動きベクトノレを検出する処理が動き検出である.動き検出処理で は参照画像と符号化対象画像の 2枚の間で動きベクトルを検出処理で、ある.この時に最も 基本となる手法としてフルサーチでは図 2・3のようなブロックで切り分けられた符号化対 象 画 像 と あ ら か じ め 設 定 し て お い た 参 照 画 像 と の 間 で 差 分 絶 対 値 和
S A D (Sum o f Absolute D i f f e r e n c e )
を用いて計算を行う.図2 ‑ 2
のようにこの処理はブロックマッチング処理を行う.そして最も低い
SAD
値が計算された場所への移動ベクトルを用いて符号 化を行う.フルサーチ実行時に探索範囲を参照画像全体にすることで理論上最高の圧縮率 を実現することができるが,その場合演算量も莫大なものとなり実用上の利用は困難とな る.またこの動き検出処理は動画像符号化の演算時間の大半を占める処理である.そのた め符号化の演算時間を減らすためには少ない演算量で最も低いSAD
を探索するアルゴリ ズムを動き検出において使用することが最も重要な要素となる.解像度 ビットレート
( M p e g ‑ 2 )
地上デジタル
1 4 4 0 x l 0 8 0 15Mbps
ハイビジョン放送
BS
デ、ジタノレ1 9 2 0 x l 0 8 0 23Mbps
ノ¥イビジョン放送
4K
画質放送3840x2160
約90Mbps
スーノミーハイビジョン
7680x4320
来ヲ370Mbps 8K
放 送表
2
・1
各放送に使用されている(必要な)ピットレート図
2
・1
時間的連続t,:1
像画
問 問
⁝ 昭 山
総
⁝ 参 紫⁝
符号化対象画像
図
2
・2
動き検出処理図
2
・3
符号化画像のブロック分割の例2.2高速化の取り組み状況
現在動画像符号化における高速化の取り組みとしてソフトウェア的手法とハードウェア 的手法の二通りのアプローチが存在している.
ソフトウェア手法の取り組みとしては
H.264/AVC
リファレンスモデルJM
で使用されて いたEPZS
やH.265/HEVC
リファレンスモデルH M
で使用されているTZSearch
,UMHexagonS [ 3 ] [ 4 ]
やEPZS[5][ 6 ] [ 7 ] [ 8 ] [ 9 ]
では複数の探索開始点を使用した手法である.TZSearch
では拡大型ダイヤモンド探索を主軸に2
点探索を用いた探索手法である.UMHeagonS
は拡大型ヘキサゴンサーチを主軸にした探索手法である.図2
・4
はTZSearch
での探索ブロックの例であり,飛び飛びの地点へのアクセスを行っており,ほかの手法も 飛び飛びのアクセスを行っていることは同様である.これらの手法は探索精度と演算量は 優れるものの離れた探索点を使用しており,メモリアクセス効率が悪い欠点がある.それに対してハードウェア手法としてメモリアクセス効率を重視し,高並列化を行うこ とで高速化を実現する.例えば
SIMD
などの並列処理に適した探索ブロックを使用するこ とでSAD
演算回数は増えるものの,並列化によって処理時間の増加を抑えることが可能 となる.事態
図
2
・4.TZSearch
の探索ブロックの1
例2.3拡大型探索
動き検出の際に用いられる手法として拡大型探索がある.この探索手法はスクエア型,
ダイヤモンド型,ヘキサゴン型など予め決定していたパターンに従って徐々に間隔を広げ ていく探索を行うものである.探索範囲を広く探索することができ,その後詳細な探索と 組み合わせることで低い演算量と高い検出精度を両立することができる手法である.また 広範囲を疎らに探索することで局所的
SAD
最小点に陥ってしまう可能性が低く,ソフトウェア的な観点からみれば優秀な手法である.
しかし距離の離れら疎らな点を探索する操作は画素データがシーケンシャルにメモリ に保存されているためにメモリアクセス効率が大幅に低下してしまう欠点がある.そのた め拡大型探索を用いた動き検出手法は高並列化の妨げになっている.
2.4追跡型探索
動き探索の手法として追跡型探索もその一つである.これも拡大型同様スクエア型,ダ イヤモンド型などの探索点ノfターンが存在するが,探索を実行するのは探索点の周辺であ る.その後最も
SAD
値が低かった場所を探索の中心点とし再度パターンに従って探索を繰 り返す.少ない演算量で良好な演算精度を実現でき,探索を行う点が中心点の周辺である ためメモリアクセス効率がよく高並列化に適している性質を有している.しかし,大きな欠点としてローカルミニマムに陥ってしまう可能があり,極端に探索精 度が減少してしまう可能性がある.そのためローカルミニマムに陥らない探索手法を併用 する必要がある.
2.5 H.264/AVC
までの動き検出ハードウェアの研究開発状況
近年はハードウェアの性能が大幅に向上し
H.264/AVC
フルハイビジョン放送程度であれ ば専用ノ¥ードウェアに頼らずともソフトウェア的に処理をすることができた. しかしなが ら近年は下記のようなスーパーハイビジョン放送が予定されており,それらに対しては十 分な処理能力を得るに至っていなし、‑そのためソフトウェア面で高速化するのみならず,ハードウェア面に対しでも考慮、したアルゴリズムを開発し実装することで莫大になる符号 化処理をこなす必要がある.
2 . 6スーパーハイビジョン放送
現在日本で、は現在のフルハイビジョン放送の
4
倍の解像度となる4K(3840x2160)
対応テ レビが発売されるなど映像の高精細化が進み,コンテンツ面としてN H K
が主体となって スーパーハイビジョン放送の準備が進められている.こ の ス ー パ ー ハ イ ビ ジ ョ ン 放 送 は フ ル ハ イ ビ ジ ョ ン 放 送 の
1 6倍 の 解 像 度 と な る 8K(7680x4320)
画質を使用した高品質なコンテンツ放送である.2016
年に試験放送を開始し
2018
年には本放送を開始,2020
年の東京オリンピックに向けて普及を目指している.またスーパーハイビジョン放送では従来の
1
秒当たりの描画枚数30
枚から倍となる60
枚となり更に2倍のデータ量となっている.従来のインフラストラクチャーではスーパー
ハイビジョン放送を行うためには必要な通信路容量を確保できない.そのため従来以上の 圧縮性能が求められており,かっ増加した解像度のために演算量が増加している.結果としてスーパーハイビジョン放送を容易に実現するためには演算時間を削減し,圧縮率を従 来以上に高め,更にはそれらを行うとともに品質低下を引き起こさないような符号化処理 が必要である.
2 . 7 H . 2 6 5 / H E V C
H.265/HEVC
は2013
年に規格化された動画像符号化規格であり,H.264/AVC
の後継フ ォーマットである.このH.265
はスーパーハイビジョンなど4K
や8K
といった高精細動画 や高速で普及が進んでいるスマートフォン向け通信に対応するために作られた規格である.H/264からの主な変更点として圧縮率が従来の約 2倍に向上したことである.これによっ
て通信に必要となる通信路が小さくても済むようになり,テレビ放送やスマートフォンな どの限られた通信設備での高精細画像の通信が可能となる.また画質の面でも従来は動き の激しい画像になるとブロックノイズが発生していたが,この規格ではブロックノイズを 抑制する仕組みが搭載されており,圧縮率を高めた場合でも画像品質の低下を抑えること が可能であり,通信インフラの限られた場所でも高い品質のコンテンツを提供することが できる.そのためスーパーハイビジョン放送や携帯端末向けの通信にはこの規格を用いた 動画像が今後普及する可能性が高い.この
H.265を動画像符号化の面から見た変更点として動き検出時に符号化画像を切り分
けられるブロックサイズが図 2・ 5 のように従来の 4x4~
1 6 x 1 6 [ 1 0 J
から図2
・6
のような4x8(8x4)~64x64 と種類が増加している点である.ブロックサイズが大きければ大きいほど
動き検出時のマッチング回数が減少し,また構成画素が大きいため画素を間ヲ│し、でサブサ ンプリングを行ったとしても探索効率が低下しにくいという特徴を有している.また従来 用いられてきた動き検出アルゴリズムではこの大ブロックが考慮、されていないため十分な
性能を発揮することが不可能で、ある.そのためこうしたブロックサイズに最適化された動 き検出アルゴリズムがスーパーハイビジョン放送に向けて必要不可欠である.
1 ( ; x l ( 3
16xS
8x16 8x8 4x8 8 x : . ! 4x4
図
2
・5H.264/AVC
における動き検出時に使用ブロックサイズs4x J 3 4
::~2xG4l G x : ヲ ネ
G ι x : ネ ヨ : 3 2 x l G
8xl G 8x8 ‑ ! x 8 8x ‑ l :
図2
・6H . 2 6 5
厄EVC
における動き検出時に使用ブロックの抜粋3 . 高速化の課題
3 . 1高効率,高並列化の両立
現在動画像符号化に使われている
EPZS
やT Z S e a r c h
といったアルゴリズムでは動き検 出に飛び飛びのデータアクセスを行っている.この手法では広範囲をローカルミニマムに 陥らずに探索することができ,高い検出精度と速度を両立している. しかしながらこの飛 び飛びの画素へのデータアクセスという処理はメモリアクセス面から見ると非常に負荷の 大きい処理である.これは画素データがラスター順に格納されており,離れた点をアクセ スする際に先にロードした画像データが再利用できないため,画像データを全てロードし 直す必要があるためである.そのためT Z S e a r c h
などのソフトウェア指向のアルゴリズムで はデータアクセスがボトルネックとなりこれ以上の高速化が困難である.現在以上の符号化の高速化を行うためには符号化処理の高並列化が必要不可欠である.
しかしアクセスのボトルネックがあると並列化による高速化が殺されてしまう.このため 効率なデータアクセスと高探索精度の両立が必要不可欠となる.
3.2
多様化した可変ブロックサイズ、への対応
H.265
での動き検出の変更点としてマッチング時のブロックサイズが従来のH.264
では4x4~16x16 まで、だ、ったのに対し 4x8(8x4)~64x64 と大きく変更されている.
大きいブロックサイズを動き検出に利用できるようになっているので,従来よりも更に 画像を間引くサブサンプリングが可能になる.従って大ブロックでは大胆に画素を間引き サブサンプリングを行ったとしても構成画素を十分に維持できる.画像をサブサンプリン グしただけで演算量を削減されるため,大ブロックでのサブサンプリングは有用である.
また大きく画素を間引し、た画像だけでは大まかな移動ベクトルのみしか検出することがで きない.そこで下位階層で近傍だけの探索を行うことで正確な移動ベクトルを低演算量で、
実現できる.
小ブロックの場合は大ブロックのように間引し1てしまうと構成画素を維持できなくなり 大幅に探索精度が低下してしまう.そのため小ブロックの場合はそのままの画像を用いて 探索を行う.また小ブロックの場合は移動ベクトノレが近傍に位置する確率が非常に高い.
その性質を利用して小ブロックでは広範囲を探索せずに近傍のみの探索にすることで演算 回数を大幅に削減することができる.
4 . 提案手法
4.1方向性
先ずは
H.265の新機能である多様なブロックサイズへの対応を行う.動き検出時はブロ
ックサイズに応じてその処理内容を適切なものを使用するようにする.また大ブロックサ イズの場合は画像をサブサンプリングしたものを利用しでも探索精度を維持することがで きるため階層的な探索が有用である.そのため大ブロックの場合は4
階層探索,中ブロッ クの場合は3
階層探索を実行することが効果的である.小ブロックの場合はそのままの画 像を用いて近傍の探索のみを実行する.これらの処理は予め探索する場所を決定すること ができるか,または近傍の探索である.そのためメモリアクセス面での効率が高く高並列 化が容易に可能である.そこでブロックサイズに応じて処理を変更する粗密階層探索を実 装した.4.2
画像のサブサンプリング
粗密階層探索を行うためには図
4
・1のように階層的な画像のサブサンプリングが必要
である.そのサブサンプリングの方法として2画素精度画像を生成する際は図 4
・2のよう
に原画像の2x2
画素の内の左上1
画素を取り出す処理を画像全体に行う.こうして生成さ れた2
画素精度画像から2x2
画素から1
画素を取り同様に4
画素精度画像を生成する.同 様の手順で 4画素精度画像から 8画素精度画像を生成する.こうして画像を間引くことに よって動き検出時の探索範囲を広げたとしても演算量の増加を抑えることができる.また この処理は動き検出を行う前に予め実行しておくことができるためメモリアクセスのロス を削減することができ,高並列化に対応している.8 画素精度画像 4 画素精度画像
2 画素精度画像
原画像
図
4
・1
画像のサブサンプリング図
4
・2
画像のサブサンプリング4 . 3 サブサンプリングされた画像を用いてのフルサーチ
フルサーチとは参照画像の探索範囲内全てとブロックマッチングを行う手法である.広 範囲をこのフルサーチで、探索を行うことで高い探索精度を実現することができるが演算量
が膨大であるという欠点が存在する.
3
階層探索及び4
階層探索の1
階層目はサブサンプリングされた画像を用いてフルサーチ を行う.原画像で、ブノレサーチを行うと演算量が膨大となるが,サブサンプリングされた画 像の場合は演算量を抑えることができる,そのためサブサンプリングされた画像を用いて 広範囲を探索することで広範囲の探索と演算量の低減を両立することができる.ただしサブサンプリングされた画像だけではおおまかな移動ベクトルしか求めることが できない.そのため徐々に 8画素精度画像なら 4画素精度画像へ, 4画素精度画像なら 2 画素精度画像へと解像度を上げていく必要がある.
4 . 4 追跡型スクエアサーチ
追跡型スクエアサーチでは探索中心点の周囲
8
点でブロックマッチングを行う,そして その中で最も低いSAD
値を示した場所を中心としてこの操作を繰り返す動き検出手法であ る.アルゴリズムは図 4・3で示すようなフローチャートで処理を行い,図 4・4のように順 次探索地点を変更していく.追跡型探索を繰り返すのは最大4
固まででとしている.それ は4
回以上行っても精度が上がらないためである.階層探索の中で
2
層目以降は1
層目で大まかな動きベクトルが求められているため,そ の近傍を探すだけで良い.そのような探索には追跡型スクエアサーチが適しており低演算 量で良好な探索精度が実現しできる,ローカルミニマムに陥ってしまう可能性は,階層探 索を用いることで予め大まかな動きベクトルが求められているため十分低くなる.また追跡型の探索は近傍の探索であるためにメモリアクセス効率が優れる利点がある.
探索開始
探索終了
図 4・3追跡型探索のブローチャート
4E E 叩 吋
EE
⁝
4E
E
1
1 度目の探索
2 度目の探索 3 度目の探索
SAD 最小点
図
4
・4
スクエアサーチの探索点4 . 5 その他
予測ベクトルが近傍に分布すると予測される場合は近傍に対して原画像を用いてフルサ ーチを実行する.このフルサーチを実行する条件は階層探索時の予測ベクトルと大まかな 動きベクトルが不一致の場合,もしくは小ブロックの場合である.
階層探索終了後予測ベクトルとすでに計算された近傍の予測ベクトルから構成された予 測ベクトルが一致しない場合
0
ベクトル及び予測ベクトル近傍の探索を行う.これは予め 求められている予測ベクトルの近傍に大まかな動きベクトルが分布するという性質を利用 したものである.探索精度を向上させるために予測ベクトル近傍の探索を実行する.また0
ベクトルとはつまり移動しないベクトルで、あり,動画像の中で移動しないオブジェクトが 多数存在する確率が高いため0
ベクトルの近傍探索も実行する.また階層探索を使用なし
¥ / J
、ブロックの場合は近傍に探索範囲を絞ったフルサーチを実行 する.これは小ブロックの場合,動きベクトルが近傍に位置する確率が高いという特性を 利用している.またフルサーチであるが構成画素数が少ないことと,探索範囲が小さいことから演算回数は多くない.