大阪工業大学 2020年度
電機システム研究系 卒業論文発表会
2021年2月27日(土)
遠隔開催
2020 年度 電機システム研究系 卒業論文発表会 プログラム
2021 年 2 月 27 日(土) 遠隔開催
持ち時間 発表10分、質疑応答5分
計時ベル 発表時間終了2分前:1鈴、発表時間終了時:2鈴、質疑応答終了時:3鈴
プログラム
13 : 00 開会の挨拶 (森實教授)
13 : 05 OB自己紹介
時刻 題目 発表者
1 13:30 洋上風力発電用三相高周波変圧器の鉄損に着目した
小型化の可能性の検討 岩井 康洋
2 13:48 大ギャップワイヤレス給電システムの開発とコードレスハウスへの展開 中野 優星
3 14:06 降圧DC-DCコンバーターの平滑コンデンサによる出力リップル特性の検証 尾上 稜真
4 14:24 EV用DABコンバータにおけるDf制御方式適用可能性の検討 大利 流世 ・ 佐藤 祐斗
5 14:42 新形パワー半導体と新回路トポロジーによる
超低損失高周波WPTシステムの研究 廣岡 翔吾
6 15:00 太陽光発電システムが多量導入された電力系統における
疑似Droop制御システムの設計手法の提案 佐藤 雄介
時刻 題目 発表者
7 15:18 2次側円盤導体を用いたリニア誘導モータ実験機における
制御特性向上の検証
尾上 明歩 ・ 岸本 諒太 西田 颯汰
8 15:36 PFCC・VSC併用形風力発電システムにおける誘導発電機のDF化による
低風速時発電電力の向上 有吉 謙汰 ・ 曽和 勇飛
9 15:54 シングルエンデッド走行中給電キャパシタスクータシステムの開発 遠藤 大地
10 16:12 風車出力を増大する風速対応型・動的MPPT制御システムに関する研究 河合 史弥 ・ 鈴木 崇司
11 16:30 直流送電システム用MMCのシミュレーションによる動作特性検証 夏目 和樹
12 16:48 新しい位相差制御方式による高効率・高ロバスト・高制御・
ハイパワーWV2Hシステムの開発 石井 亮佑 ・ 小畑 圭吾
17 : 03 講評 (又吉講師)
17 : 10 閉会の挨拶 (大森教授)
発表番号 01
洋上風力発電用三相高周波変圧器の 鉄損に着目した小型化可能性の検討
発表者 岩井 康洋:メカトロニクス研究室 指導教員:森實 俊充
1. はじめに
近年、風力発電の問題点である立地の確保、景観 への影響、騒音問題を解決できるとして洋上風力発 電が注目されている。しかし洋上風力発電は沖から 陸への長距離に渡って送電を行う必要があり、距離 が大きくなると送電損失が大きくなるため交流に比 べて損失の少ない高圧直流送電が検討されている。
交流電力を高圧直流電力へ変換するには変電設備 を洋上風力発電機の付近に設置する必要があるが、
海上建築となるため陸上と比べて建築コストが大き いことが課題となっている。変電設備では昇圧を行 うために変圧器を使用するが、設備を50/60Hzで 運用した場合、設備重量の8%を変圧器が占めるこ ととなる。そのため、変圧器の軽量化による設備全 体の軽量化と建築コスト低減が期待されている。
2. 研究目的
本研究は通常の変圧器に比べて小型化が可能な高 周波変圧器に注目し、洋上変電設備で使用する変圧 器の小型軽量化及び損失低減を行うことが目的であ る。変圧器の損失には鉄損と銅損が存在するが、本 研究では鉄損に着目し変圧器の形状や材料の比較か ら小型化の可能性を検討する。
3. 変圧器の比較
変圧器を運転すると損失が生じる。損失は電力が 無駄となるだけではなく発熱によって材料の劣化を 引き起こすため損失は小さいものが望ましい。変圧 器を正弦波交流で運転した時の鉄損を(1)式に示す。
𝑊𝑖= 𝑊ℎ+ 𝑊𝑒 = 𝐾ℎ𝑓𝐵𝑚2 +𝐾𝑒(𝑑𝑓𝐵𝑚)2
𝜌 (1)
𝑊ℎ:ヒステリシス損 𝑊𝑒:渦電流損 𝐾ℎ, 𝐾𝑒:鉄損係数 𝑓:周波数
𝐵𝑚:磁束密度の振幅 𝑑:鉄心一層の厚み 𝜌:抵抗率
鉄損は周波数に比例して増加するため高周波変圧 器を用いて小型化を行う場合、損失の増加が課題と なる。この損失を低減するためには、①鉄損係数の 小さな材料を使用する、②磁束密度を小さくするこ とが必要である。また、鉄損係数は鉄心材料や形状 によって異なる。そのため鉄心材料、設計会社、鉄
心構造の異なる変圧器を7台用いて比較を行った。
実験に用いた変圧器の仕様を表 1に示す。以降 変圧器の表示には表 1-記号を使用する。
表1 変圧器の仕様
3-1. 鉄損の比較
(1)式の通り鉄損は磁束密度𝐵𝑚の2乗に比例して
いる。また磁束密度は変圧器によって異なる。その ため鉄損の比較を行うためには磁束密度が必要とな る。変圧器を正弦波で運転した場合の磁束密度の振 幅を(2)式に示す。
𝐵𝒎= 𝐸
4.44𝑓𝑁𝑆 (2)
𝐸:電圧の実効値 𝑁:巻き数 𝑆:鉄心の断面積
(2)式より求めた定格運転時の磁束密度の振幅Bm
を表2に示す。
表2 定格運転時のBm
A-s A-a A-f B-s B-a B-f C-s Bm3kHz[T] 0.21 0.23 0.23 0.12 0.15 0.15 0.05
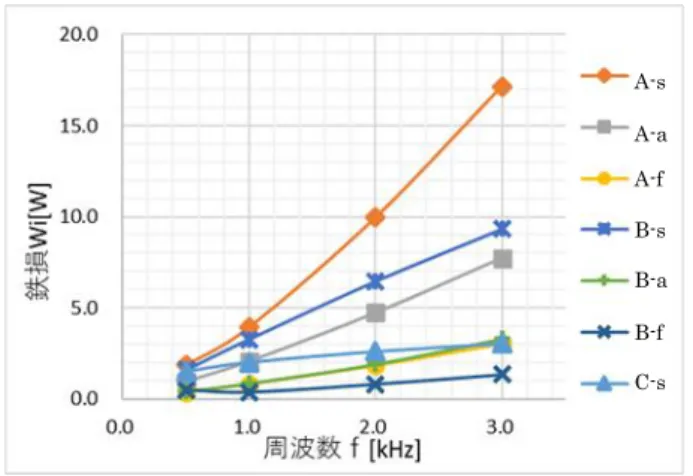
次に表2で算出した磁束密度を用いて鉄損の比較 を行った。磁束密度による処理前の鉄損-周波数特 性グラフを図1に示す。
記号 A-s A-a A-f B-s B-a B-f C-s
設計会社 A社 B社 C社
定格容量
[V・A] 5000
定格電圧
[V] 200
定格電流
[A] 14.5
定格周波
数[Hz] 3000
結線 Δ-Δ
構造 内鉄型 外鉄型
巻数
1次:2次 53:54 84:84 100:100
鉄心材料 スーパー コア® アモル ファス ファイン メット® ケイ素 鋼板 アモル ファス ファイン メット® ケイ素 鋼板 厚み
[mm] 0.1 0.018 0.018 0.1 0.018 0.018 0.23
質量[kg] 16.5 15.8 16.0 16.2 15.0 14.7 15.9 寸法[cm]
奥行 幅 高さ
14.0 22.2 19.5
11.3 22.0 19.2
16.5 21.0 13.4
図1 鉄損-周波数特性実測値
次に、(1)(2)式より図1のWiをBmの2乗で除 算したものを示す。なおC-sの3kHz時のWiを 100%とした割合で表示している。
図2 鉄損-周波数特性の計算結果
図2の比較結果から、定格周波数3kHz時の鉄損 を確認するとC-sが最も大きくA-fが最も小さかっ た。これは(1)式に示す鉄損係数が、C-sは大きく A-fは小さいことを示している。しかし図1では 3kHz時において二つの損失は近い値となっている。
これは表2に示すようにC-sは他の変圧器と比較し て磁束密度が小さいことが要因と考えられる。
4. 小型化可能性の検討
鉄損は鉄損係数と鉄心断面積に関係しているため 鉄損係数の小さな材料を使用した場合、小型と低損 失を両立することが可能である。しかし変圧器によ ってそのポテンシャルは異なるため、表1の変圧器 を同一の鉄心材料、同一の鉄損で製作した場合を仮 定し寸法の違いを比較する。
4-1. 算出方法
変圧器の鉄心材料をすべて同じ素材で製作した場
合を仮定すると鉄損は式(3)となり、磁束密度で損 失が定まる。
𝑊𝑖=𝐾𝑒(𝑑𝑓𝐵𝑚)2
𝜌 (𝛼:定数)
= 𝛼𝐵𝑚2
(3)
電圧、周波数を定数とすると鉄心の断面積は式 (4)となり、巻数と磁束密度のみで定まる。
𝑆 = 𝛽 𝑁𝐵𝑚
(𝛽:定数) (4)
式(3)(4)より現在の鉄心断面の一辺の長さを
𝐿𝑜𝑟𝑖𝑔𝑖𝑛設計変更後の一辺の長さを𝐿とすると二つの
関係は式(5)となり磁束密度のみで長さが定まる。
𝐿
𝐿𝑜𝑟𝑜𝑔𝑖𝑛= √𝐵𝑚𝑂𝑟𝑖𝑔𝑖𝑛
𝐵𝑚 (5)
4-2. 寸法比較
図2において最も損失の少なかったA-fに使用さ れている鉄心材料で表1に示す変圧器を製作した場 合を想定し、(5)式を用いて寸法を計算した。結果 を表3に示す。
表3 鉄心材料にA-fを使用した場合の寸法
表3より鉄心材料、鉄損を同値として変圧器を制 作した場合C-sが最も小型となることが分かった。
5. 結論
鉄損の小さな材料の調査と小型化の検討を行うた め7種類の変圧器を用いて実験を行った。結果とし て最も鉄損の少ない材料はA-f、最も小型化の可能 性のある変圧器はC-sであることが確認できた。
今後はC-sを基本として定格時の磁束密度の変更 や損失の小さな鉄心材料の使用を検討する。また本 稿では鉄損に着目し変圧器の比較を行ったが変圧器 は鉄損以外に銅損も存在するため、同様に銅損にお いても調査を行う必要がある。
A-s A-a A-f B-s B-a B-f C-s
寸法[cm]
奥行 幅 高さ
13.4 21.2 18.6
14.0 22.2 19.5
14.0 22.2 19.5
8.16 15.9 13.9
9.13 17.8 15.5
9.13 17.8 15.5
7.69 9.79 6.24 容積
[cm3] 5283.9 6060.6 6060.6 1083.4 2519.0 2519.0 469.8 A-s
A-a A-f B-s B-a B-f C-s
A-s A-a A-f B-s B-a B-f C-s
発表番号 02
大ギャップワイヤレス給電システムの開発と コードレスハウスへの展開
発表者 中野 優星:パワーエレクトロニクス研究室 指導教員:大森 英樹
1. はじめに
近年、ワイヤレス給電技術はモバイル機器や電気 自動車への充電など様々な用途で実用化に向けた検 討が行われており、非常に注目が高まっている。
ワイヤレス給電はケーブルが不要なため感電の危険 性がなく、コネクタに接続しなくても給電エリアに 置くだけで、自動で充電でき、安全性・利便性の向 上が期待できる。
さらなるワイヤレス給電技術の応用拡大として、
室内の家電製品に対し壁や床から直接無線で給電を 行うことで、コードやコンセントのない「コードレ スハウス」などの将来像が考えられる。
本研究では、コードレスハウスの実現に向けて、
大ギャップでのkW級電力伝送を可能にするワイヤ レス給電装置の開発に取り組んでいる。
2. ワイヤレス給電によるコードレス家庭内配電 利用自由度の高いワイヤレス給電の応用例のひと つとしてコードレス家庭内配電が挙げられる。図1 にコードレス家庭内配電の給電イメージ図を示す。
図1のように壁や床下等に給電装置を埋め込み、そ の給電コイル上に設置または移動する際に、ワイヤ レスで給電する。このことによりプラグ式による着 脱の手間や移動可能距離の制限を不要とすることが 可能となる。またコードレス家庭内配電では各家電 への直接給電を行うので、充電忘れがなく、バッテ リレスを実現できるため家電のコストを抑えること ができる。
図1 家電製品に対しての給電イメージ
3. 大ギャップ対応WPTシステムの構成
図 2 にワイヤレス給電システムの構成を示す。給 電用インバータには SEPP(Single-Ended-Push-Pull) インバータを用いている。本研究では低結合におい ても安定したkW級の電力を供給することを目的とし ているため、低結合である結合係数 k=0.1 まで電力 を確保できる設計を行っている。伝送電力は屋内の すべての電気機器に対してワイヤレス給電すること を想定して、1.5kWとし効率は80%以上とする。
図2 大ギャップ対応WPTシステム
4. 特性インピーダンスを用いた最適設計 無線給電で用いる共振回路の設計を行うため、式 (1),(2)をもちいると、図3のような特性インピー ダンス(𝑍𝑐= √𝐿 𝐶⁄ )に対する出力電力と効率を示す ことが出来る。共振点動作における出力電力Po、効 率 η は共振周波数(動作周波数)に依存せず、特性 インピーダンスZcにより一意に決まることが分か る。
𝑃0=(𝑘𝑍𝑐)2 1
𝑅𝑜 + 1
(𝑘𝑍𝑐)2(𝑟4
𝑅𝑜+𝑅𝑜𝑟2+2𝑟3)+2𝑟2
𝑅𝑜+2𝑟𝑉𝑖2・(1)
η = 1
1+ 𝑟𝑅𝑜
(𝑘𝑍𝑐)2(1+𝑟
𝑅𝑜)2+𝑟
𝑅𝑜
・・・(2)
図3 特性インピーダンス特性
出力電力にマージンをとり1.8kW、かつ最も効率の 良い点を選ぶと特性インピーダンス𝑅𝑐は 40Ω となっ た。また動作周波数(=共振周波数)を85kHzとすると、
L = 𝑅𝑐/𝜔𝑜 C = 1/𝜔𝑜𝑅𝑐より給受電コイルの自己イン ダクタンス L=74.9μH、共振コンデンサC=46.8nFが 最適設計値として得られる。
5. コードレスハウスへの応用展開
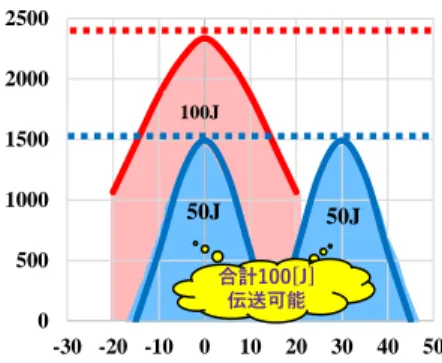
掃除機など移動しながらの使用が考えられる機器 などに対しては、給受電コイルの位置がずれても常 に電力を供給し続けなければいけない。しかし、図5 に示す1 対1 の伝送コイルでは位置ずれによって給 電エリアから外れてしまえば目標の結合係数 0.1 以 上を確保できず、パワーを供給できない。
図5 位置ずれに対する結合係数
図6 マルチコイル受電方式
そこで、本研究では課題を解決する新しい方式と して、図6に示すマルチコイル受電方式を提案する。
複数枚のコイルの中から位置ずれの少ないコイルペ アを給電に用いれば、位置ずれがあっても目標の結 合係数 0.1 以上が確保でき、移動しながらの電力供 給が可能になる。
6. まとめ
特性インピーダンスに対して目標仕様である伝送 電力1.5kW以上、効率80%を満たす伝送回路設計を 行い、最適定数設計を行った。また、実働試験を行 ったところ、共振周波数85kHz付近で最大値となり 出力電力1.5kW以上の確保を確認できた。
また、掃除機などの使用時に移動を伴う家電への 安定した電力供給を行うことが可能となる、マルチ コイル受電方式を提案した。これにより位置ずれに よる結合係数の減少の課題を解決できる。
参考文献
(1) 井上 実 :「受電側制御NFC機能を有する大ギ ャップ無線電力伝送システムの研究」
大阪工業大学卒業論文(2017)
(2) 大西 智貴,小林 剛士 :「S/SP伝送による通信機 能付大ギャップワイヤレス給電システムの研 究」
大阪工業大学卒業論文(2014)
(3)下之段 拓実,城 健太郎,樋口 清志郎:「重畳 通信機能付走行中ワイヤレス EV 給電システ ムの研究」大阪工業大学卒業論文
(4)大西 智貴,小林 剛士:「S/SP伝送による通信 機能付き大ギャップワイヤレス給電システム の研究」大阪工業大学卒業論文
(1) S2PC, Niigata, Japan, 14-16 October 2016 A Design Strategy of a Large Gap S/S Resonant Wireless Power Transfer System by Characteristic Impedance
(2) EDPE, Dubrovnik, CROATIA, 4-6 October 2017 A New Large-gap Wireless EV Charger with a Power Superimposition Communication
発表番号 03
降圧 DC-DC コンバータの平滑コンデンサによる
出力リップル特性の検証
発表者 尾上稜真:パワーコントロール研究室 指導教員:主担当 又吉秀仁
1. 研究背景
現在、わが国では太陽光発電や風力発電等の再 生可能エネルギーを活用した発電設備の導入が積極 的に進められている。資源エネルギー庁が2010年に 策定した「2030年のエネルギー需給の姿」では国全 体の発電設備容量のうち再生可能エネルギー電源
(RES:Renewable-Energy-Sources)が約 4 割を占め ているため、RESの大量導入に適した電力系統構成が 必要とされている。しかしながら、RESによる発電電 力は気象条件に左右されるため、大量導入した場合 に電力需給平衡が不安定化し、安定した電力供給が 困難となることが問題である。近年では太陽光発電、
風力発電、地熱発電、蓄電池、燃料電池など多くの直 流電源が導入されている[1]。RESは直流電力系統に おける活用が注目されている。
しかし、電力変換に使用する直流/直流コンバータ にはリップル電圧という問題がある。リップル電圧 は理想的にはゼロであることが望ましい。リップル 電圧が大きく変動し、負荷側のシステムの最低動作 電圧よりも低くなってしまうと、システムの動作異 常を引き起こす。近年はDC-DCコンバータの低電圧・
大電流化が進んでいるため、より一層の安定した電 圧供給が求められる。[2]
2. 研究目的
DC-DCコンバータは風力発電、太陽光発電などに
用いられている。PVシステムの動作点制御には電力 変換器が必要であるため今回はその一例として、降 圧チョッパ回路の特性について研究した。本研究で
は、DC-DC降圧コンバータを用いて、平滑コンデン
サによる出力リップルの低減の検証を行う。
3. 実験機の構成 3.1 実験機の回路図
本研究では平滑コンデンサによる出力リップルの 低減の検証するために降圧チョッパを用いて実験を 行った。図1に回路図を示す。
3.2 測定方法
出力リップルの測定方法は図 1 の抵抗 R(30Ω)に 受動プローブを接続し、オシロスコープでの測定を 行う。デューティ比D=0.5、周波数5 kHz で駆動さ せ、出力電圧𝑉𝑜𝑢𝑡を、次に示す各入力電圧𝑉𝑖𝑛と平滑コ ンデンサ容量𝐶2の条件下で測定する。
入力電圧𝑉𝑖𝑛:3、5、7 [V]
平滑コンデンサ容量𝐶2:3300、6600、9900 [μF]
3.3 実測値の出力リップル率の導出
リップル率とは平均値に対する脈動の割合のこと である。3.2 測定方法により出力電圧𝑉𝑜𝑢𝑡を測定し、
図 2 から出力電圧最大値𝑉𝑜_𝑚𝑎𝑥と出力電圧最小値
𝑉𝑜_𝑚𝑖𝑛により平均電圧𝑉̅𝑜を求める。リップル率は図
2.3の各電圧の値を用いて式(1)で計算される。
𝑉𝑜_𝑚𝑎𝑥−𝑉𝑜_𝑚𝑖𝑛
𝑉𝑜
̅̅̅ × 𝟏𝟎𝟎[%] (1) 図1 実験機の回路図
図2 出力電圧𝑉̅𝑜の算出方法
3.4 出力リップル率の理論値の導出
この式(3)右辺の積分値は図3の真ん中の影で示し た三角形の面積 ΔQ となっている。この三角形の高 さはΔIそのものであり、また底辺の長さは𝑡𝑏−𝑡𝑎、 つまり𝑇𝑠
2であるから、式(4)は [3]
Δ𝑉𝑝−𝑝 = 1
𝐶∫ (𝐼𝑡𝑎𝑡𝑏 𝐿− 𝐼𝑜𝑢𝑡)𝑑𝑡 (3) Δ𝑉𝑝−𝑝=𝑇𝑠𝛥𝐼
4𝐶 (4)
となり、出力リップル電圧ΔV𝑝−𝑝の理論式を求め、
出力リップル率の理論値は式(5)のように求めた。
𝛥𝑉𝑝−𝑝
𝐷𝑉𝑖𝑛 × 100[%] (5)
4. 降圧DC-DCコンバータの出力リップル特性の測 定
4.1 各入力電圧の実測値の出力リップル率 入力電圧3、5、7Vの実測値の出力リップル率を 図4に示した。
図4では、平滑コンデンサ𝐶2の容量を大きくするに つれて実測値の出力リップル率が減少した。
4.2 実測値の出力リップル率と出力リップル率の 理論値
式(5)より、出力リップル率の理論値を計算し、
入力電圧𝑉𝑖𝑛=7Vでの出力リップル率の理論値と実測 値の出力リップル率を表1に示す。
表1により比較したその結果、出力リップル率の 理論値と実測値は大幅な乖離が見られた。
4.3 実験結果に対する検討
本実験の結果、出力リップル率の理論値と実測値 に大幅な乖離が見られた。本実験ではスイッチング 周波数5 kHzによりスイッチングデバイスを駆動さ せているが、出力電圧が50 MHzで振動しているこ とが確認できたため、スイッチング周波数よりも速 い周波数で振動しているといえる。このことから、
スイッチング周波数とは異なる要因によって、理論 値以上のリップル電圧が発生したと考えられる。
5. 結論 5.1 結論
リップル電圧は理想的にはゼロであることが望ま しい。しかし、今回の本実験の実験条件では平滑コ ンデンサ𝐶2の容量を大きくするにつれて出力リップ ル率は減少するが、ほぼゼロになることはできない と確認した。
6. 参考文献
[1] Hidehito Matayoshi, “Islanding operation scheme for DC microgrid utilizing pseudo Droop control of photovoltaic system” Energy for Sustainable Development,Volume 55, April 2020, Pages 95-104
[2] 株式会社村田製作所
https://www.murata.com/ja/jp/products/inductor /power/learn/basic_03/basic_03_2
[3] チョッパ回路のリップル電圧
http://energychord.com/children/energy/pe/dcdc /contents/dcdc_chopper_ripple.html
図3 降圧チョッパ回路の電流𝐼𝐿と出力電圧𝑉𝑜𝑢𝑡の関係
図4 各入力電圧の実測値の出力リップル率
表 1 出力リップル率の理論値と実測値の出力リップル 率
発表番号 04
EV 用 DAB コンバータにおける Df 制御方式適用可能性の検討
発表者 大利流世 佐藤祐斗 指導教員:森實俊充
1. 研究背景
近年、大気汚染や地球温暖化により、人体や自然環 境に悪影響を及ぼしている。(1)このような悪影響を 改善するために、排気ガスを排出しない電気自動車 の普及が進められている。しかし、2つの大きな問題 によって普及が妨げられている。1つ目が、車両価格 が高価であること、2つ目に航続距離が短いことが挙 げられる。(2)航続距離延長を図るためにバッテリー 容量を増加すると車体重量・車両価格が増加し解決 に至らない。(3)価格を上げずに航続距離を延長する ためには、バッテリー容量を増加させず、航続距離延 長を図る必要がある。
本研究では、バッテリー容量を増加させずに航続 距離を長くすることを検討している。その実現に向 け、電気自動車の変調方式として変形台形波変調を 用いており、変形台形波変調を実現するためにPAM 制御で制御することを検討している。PAM制御をお こなうためには、インバータの入力電圧をDC/DCコ ンバータで制御する必要がある。
2. 研究目的
本研究では、PAM制御をおこなうに適したDC/DC コンバータを選定し、そのDC/DCコンバータの出力 電圧を変える制御方式として、Df(Duty factor)制御で 適用可能であるのかを検討することを目的とする。
3. 電気自動車用DC/DCコンバータの選定
電気自動車に適切な DC/DC コンバータの選定を 行う。先行研究で使用していたコンバータを図 1 に 示す。
図1 先行研究で用いていたコンバータ
このコンバータは双方向に電力を供給できるコンバ ータである。しかし、力行時は昇圧コンバータで動作
するため、バッテリー電圧以下の出力ができず、変形 台形波変調のメリットが得られないという問題点が ある。そのため、バッテリー電圧以下の出力が可能な 双方向 DC/DC コンバータである DAB(Dual-Active-
Bridge)方式双方向 DC/DC コンバータを採用した。
DABコンバータの回路図を図2に示す。
図2 DAB方式双方向DC/DCコンバータ回路構成 4. DAB方式双方向DC/DCコンバータの設計
入力電圧が 2 倍に昇圧できるように巻き数比 が1次側と2次側で𝟏: 𝟐、実験機で使用している モータの定格が 72V となるような条件に設定し ている。よって、入力電圧を𝟑𝟔𝐕、出力電圧を𝟕𝟐𝐕、 トランス小型化のために高周波化し、トランスに 流れる最大許容電流を𝟔𝐀とした。次に、LCRメ ータを用いて作製したトランスのインダクタン ス𝑳𝟏・𝑳𝟐、漏れインダクタンス𝑳𝒍𝟏・𝑳𝒍𝟐 インダ クタンス𝑳𝟏′を測定した。設計したパラメータを 表1に示す。
表1 設計したパラメータ
5. DAB方式双方向DC/DCコンバータの動作試験 作製したDABコンバータの実機を用いてDf比を 調整し動作させた。Df比を変えることにより、入力 電圧に対する出力電圧が変化する。各Df比に対し出 力電圧がシミュレーション通りに駆動しているか確 認した。入力電源は安定化電源を用いた。
本研究の最大入力電圧である36Vに対してそれぞ れDf比0.2 0.3 0.4の時の出力電圧を確認した。また、
Df 比 0.2~0.5 の実測値とシミュレーション値をグラ
フ化したものを図3に示す。
図3 実測値とシミュレーション値の関係
Df比0.3 0.4 0.5の時は実測値がシミュレーション
値通りに出力できていた。しかし、Df比0.2の時に 実測値に差が出ており、Df比0.3未満で出力電圧30V 以下が出力できていないことが分かった。
このシミュレーション値と実測値との差にはそれ ぞれのDf 比の高調波成分が影響していると考える。
この高調波成分を導出するためにフーリエ級数展開 の式を用いる。フーリエ級数展開の式を(1)~(4)に示 す。
𝑓(𝑥) =𝑎0
2 + ∑(𝑎𝑛cos 𝑛𝑥 + 𝑏𝑛sin 𝑛𝑥)
∞
𝑛=1
(1)
𝑎0=1
𝜋∫ 𝑓(𝑥)𝑑𝑥
𝜋
−𝜋
(2)
𝑎𝑛=1
𝜋∫ 𝑓(𝑥) cos 𝑛𝑥 𝑑𝑥
𝜋
−𝜋
(3)
𝑏𝑛=1
𝜋∫ 𝑓(𝑥) sin 𝑛𝑥 𝑑𝑥
𝜋
−𝜋
(𝑛 = 1,2,3,・・・) (4) 矩形波の振幅値を1とした時のDf比と基本は成分の 振幅値b1、第3次高調波の振幅値b3、第5次高調波 の振幅値b5の関係を図4に示す(4)。
図4 Df比と高調波成分の関係
図 4 よりデューティ比によって高調波成分が変わる ことが確認できた。この高調波成分の変化が出力電 圧波形に影響を与えていると考えられる。
6. まとめ
DABコンバータの動作確認を行い、入力電圧36V から出力電圧72Vに昇圧できることが確認できた。
その後、Df 比の変更による Df 制御をおこなうこと によって出力電圧の変化を確認することができた。
しかし、Df比0.3未満の領域で可変出力ができない ことからDABコンバータのDf 制御ではPAM制御 が実現できないと考えた。
7. 今後の課題
Df制御ではなく位相差制御による動作試験を行い、
位相差制御が PAM 制御に適用できるのかを検討す る。また、EV用のコンバータであるため、力行時だ けではなく、回生時の特性も明らかにする必要があ る。
8. 参考文献
(1)「主な大気汚染物質と人体への影響」
https://www.erca.go.jp/yobou/taiki/kangaeru/kankyou /03.html
(2) 「EV・PHVの課題」
http://www.ev-phv-hokkaido.com/evproblem
(3) 「自動車のバッテリーを大きくする、そのメリッ トとデメリットは?」
https://www.kurumaerabi.com/car_mag/list/2928/
(4)PWM 電力変換システム―パワーエレクトロニク スの基礎―p56 57 著 谷口勝則
発表番号 05
新形パワー半導体と新回路トポロジーによる超低損失高周波
WPT システムの研究
廣岡 翔吾(パワーエレクトロニクス研究室)
1.研究背景
近年、地球温暖化問題の有力な解決策の一つとして電気 自動車が注目されている。しかし、普及が進んでいない状 況となっている。原因は、充電スタンドの少なさとコスト と考えられるため、一般家庭に分散配置できる超小形・低 コストのシングルエンデッド(SE)ワイヤレスEV充電装置 を提案する。本システムを図1に示す。しかし、シングル エンデッドコンバータは、共振を用いて高周波電力を作り 出すため、共振電圧に耐えることのできる、高耐圧のデバ イスが必要となり、システム実現における課題となってい る。
図1 ブリッジインバータと シングルエンデッドインバータ
2.新形パワー半導体によるSEワイヤレス給電の高性能化 開発当初、システムの動作周波数は25kHzであったが、国 際規格に対応するため、動作周波数を85kHzへ高周波化を 行った。85kHz動作において、IGBTの損失評価を行ったと ころ、テール損失が過大となり、実現不可能であることが 判明した。そこで、テール電流がなく、オン抵抗の低減が 可能なSiC-MOSFETを適用することで、導通損を抑えたま ま大幅にスイッチング損を低減し、85kHz動作を実現し た。
図2.動作周波数85kHzでのパワー素子損失実測値 次に、1kWから3kWへのハイパワー化を行う。ハイパ ワー化に伴い、素子の耐圧が増加する。耐圧を上げるとオ ン抵抗も高くなるため、従来素子では導通損が大きくなっ てしまう。そこで、Vトレンチ構造を持つSiC-VMOSFETを 新たに開発した。この素子は、チャネル抵抗が大幅に低減 され、高速スイッチングが可能であることを図3に示す。
このSiC-VMOSFETを適用し、85kHz 3kWシステムでの損失 評価を行った結果、目標の損失率5%以下に抑えた。
その一方で、ターンオフ損失が大きいため、次にターン オフ損失の改善を行う。
図3. SiC-VMOSFETのオン抵抗と構造 3.ドライブパタンの改善によるスイッチング速度改善
さらなるスイッチング損失低減のために、回路実装に着 目し、ドライブパタンの改善を行った。主電流とドライブ 電流を分離した結果、スイッチング時間1/5総損失1/2の 低損失化を達成した。
さらに、図4の通り回路上の寄生インダクタンスを低減す る改善パタンを適用した。その結果、スイッチング損失を さらに半分に低減し、最終的に開発当初比1/6もの低損失 かを実現した。
(a).従来トポロジー (b).新トポロジー 図4回路トポロジーの改善
図5開発当初からの損失改善のまとめ
Source
Drain
C-face 4H-SiC substrate n-drift
layer
Grounded buried p+ regions p-well p+n+ Gate
SiO2
2nd epi 1st epi 3rd epi
4. ケルビン素子の高周波化検討
高周波域の使用が可能な新しい高耐圧のデバイスとしてケ ルビン端子付きSiC-VMOSFETを適用し、高周波化検討を行 った。スイッチ電圧は共振電圧とスパイク電圧に分けられ、
スパイク電圧は寄生インダクタンスによって変動する。そ こで共振電圧だけを高周波化し、スパイク電圧はそのまま で200kHz,400kHzのスイッチング損失を計算した。その結 果を図6に示す。85kHzではケルビン素子による損失低減 効果はほとんどないが、200kHzで15%、400kHzで25%の損 失低減効果があると考えられる。
図6 実測値からの計算結果 5.ケルビン素子の評価
一般的に、スイッチング速度が速いほど損失は小さくなる ため、スイッチング速度を速くする。85kHz,200kHz動作に おいて、通常ドライブとケルビンドライブの損失評価を行 った。結果を図7に示す。通常ドライブよりケルビンドラ イブのほうが 2~2.5 倍のスイッチング速度の高速化を確 認し、スイッチング損失も13W低減された。
図7 通常ドライブとケルビンドライブによる損失評価 6.スイッチング損分析
共振電圧による損失は素子を高速化するとスイッチング時 間に略比例して低減するが、寄生インダクタンスによる損 失はスイッチング時間に無関係で寄生インダクタンスの大 きさで決まる。実測値に基づいて損失を計算した。表1の
ように寄生インダクタンスによる損失が半分を占め共振電 圧による損失が半分を占めている。
表1 共振電圧によるスイッチング損失と 寄生インダクタンスによるスイッチング損失(実測値)
7. ケルビン素子実装
図 8(b)のようにベアチップ実装およびセラミックコンデ ンサを使用する新実装により図 8(a)の従来実装より寄生 インダクタンスを低減することができ、さらなる低損失化 を図る。
図8(a) 従来実装 図8(b) 新実装 8.まとめ
①.超小形低コストのシングルエンデッドワイヤレスEV充 電装置を提案した。
②SiC-MOSFETを適用することで、導通損を抑えたまま大幅 にスイッチング損を低減し、85kHz動作を実現した。
③. 実用化に対応した3kWのハイパワー化を、VMOS構造の SiC-MOSFET を用いることで実現した。
④.主電流経路とドライブ経路を専用配線を用いて回路上 で切り離した結果、ターンオフの高速化を実現した。
⑤.新トポロジーを提案し測定を行った結果、スイッチング 損の低減に成功した。
以上を行うことにより、開発当初の損失率 17%に対し最終 的に損失率2.8%、実に1/6 という超低損失化を1kWから 3kWへのハイパワー化と合わせて実現することができた。
⑥.高周波域の使用が可能な新しい高耐圧のデバイスとし てケルビン端子付きSiC-VMOSFETを適用した。
⑦.ケルビン端子付き SiC-VMOSFET を適用することで、ス イッチング速度の高速化を実現した。
⑧.ケルビン素子のベアチップ実装により寄生インダクタ ンスの低減を提案した。
共振電圧 寄生インダ クタンス による損失 による損失
48W 27W 21W
ターンオフ 損失
発表番号 06
太陽光発電システムが多量導入された電力系統における
疑似 Droop 制御システムの設計手法の提案
発表者 佐藤 雄介:パワーコントロール研究室 指導教員:主担当 又吉 秀仁
1. 研究背景
電力系統において電力の需要と供給量は同時同量 でないとなければならない。現在の電力システムで は電力の需給バランスの調整を火力発電や水力発電 などのバックアップ電源と呼ばれる発電出力の調整 が容易な電源により行われている。しかし、不安定な 電源である再生可能エネルギー電源(RES: Renewable Energy Sources)の導入割合が増加すると、これらの 電源だけでは調整力とし不十分となる。(1)そこで全 く新しい電力システムである DC マイクログリッド における電力のマネジメント手法が注目されてい る。マイクログリッドにおいて、PVシステムを運用 することにより PV システムを調整力とすることが 可能となる。
本研究では、マイクログリッドにおけるPVシステ ムの制御手法と設計手法について提案する。
2. 太陽光発電システムの構成
PVシステムの回路構成を図1に示す。本研究の PVシステムでは昇圧型のコンバータを採用してい る。 PVアレイの最大出力が得られる電圧には日射 量に応じて大きく変化しないという特性がある。図 2から PVアレイの出力電力は最大出力が得られる 電圧以下の領域において、端子電圧とほぼ線形の特 性としてみなせる。また、日射量と最大出力電力も 比例の関係にある。上記の特性を利用することで、
最大出力値の情報を必要としない単純な端子電圧制 御システムによるPV出力電力の疑似的なDroop 制 御が可能となる。
図1 PVシステムの回路構成
図2 PV出力特性 3. Droop制御
Droop制御とは、系統内のすべての電源が最大出
力に対して同比率で出力するように出力電力を調整 する制御手法である。
3.1 PVシステムにおけるDroop制御
PVシステムにおけるDroop制御は、全てのPV システムが最大出力に対して同比率で出力を行うよ うに、出力を抑制する制御である。Droop制御の特 徴として同比率で出力を行うことで、電源1台が故 障または解列した場合に、 系統に与える悪影響が 小さいという利点がある。
これまでにも様々なDroop制御の手法が提案され てきたが、いずれの手法も”追加機器が必要とな る”、“動作アルゴリズムが複雑になる”などの欠点 があり実用性が高くない。提案する疑似Droop制御 は自端情報から動作点を決定し、シンプルかつ追加 機器を必要としないDroop制御を可能とする。ま た、提案する疑似Droop制御は自端情報から出力を 決定する自端情報から出力を決定しているため、通 信を必要とせず通信障害による影響を受けない。
図3 疑似Droopコントローラ
3.2 パラメータKPVの決定方法
本研究では母線電圧VDC = 380Vの場合PVアレ イは最大出力に対して100%、VDC = 390Vの場合 最大出力に対して0%の出力を行うようにKPVを決 定した。KPVは以下の式によって与えられる。
𝐾𝑃𝑉 = 𝑉𝑅 𝑉′𝐷𝐶
10
ここで、VR:PVアレイの最大出力が得られる端子電
圧、V’DC:母線電圧の目標値である。
また、本研究ではVDC=380Vとし、母線電圧を適 正範囲内である380Vになるように設計した。
4. シミュレーション
先行研究(2)では、小規模系統に導入されたPVシ ステムは単一のものとした場合の運転を検証した。
そこで本研究では、複数のPVシステムが導入され た場合の運転について検証する。
シミュレーションにおける電力系統の構成を図4 に示す。系統に最大出力と最大出力が得られる端子 電圧が異なるPVシステムを接続し、母船電圧VDC
を380 Vから390 Vの間で変化させ、それぞれの
PVシステムの出力波形を確認した。ここで、母線 電圧の変動には電圧源を用いた。
図6に示す通り、図5のVDC = 384 Vの時すべて のPVシステムが最大出力に対して60%、VDC =
389 Vの時最大出力に対して10%のように母線電圧
の変動に従った出力波形が確認できた。これは日射 量が変化しても同様の動作が確認できた。
よって、今回提案したKPVの設計手法の有用性が 確認できた。
図4 想定した電力系統
図5 母線電圧
図6 シミュレーション結果 5. まとめと今後
系統に接続されたすべてのPVシステムの母船電 圧の変動に従った任意の割合の出力抑制を確認し た。よって、今回提案したKPVの設計手法の有用性 が確認できた。
今後の課題としては、今回作成したモデルは系統 を簡略化しているため、その他のユニットを接続し より、実際の系統に近い条件で検証を行う必要があ る。また、スケールダウンした実験機を使用した実 機検証も行う必要がある。
6. 参考文献
(1) Makoto Sagimura, Tomonobu Senjyu, Hiroshi Takahashi “Optimization of Equipment Capacity in Micro Grid with Renewable Energy Sources”
Proceeding of the International Council on Electrical Engineering (ICEE2019), 2019 IEEE Region 10 Conference (TENCON), pp.602-605, India, October 17- 20, 2019.
(2) Hidehito Matayoshi, Mitsunaga Kinjo, Shriram S.
Rangarajan, Girish Ganesan Ramanathan, Ashraf M.
Hemeida, Tomonobu Senjyu “Islanding operation scheme for DC microgrid utilizing pseudo Droop control of photovoltaic system” Energy for
Sustainable Development,Volume 55, Pages 95-104, April, 2020.
2021年2月27日 発表番号 07
二次側円盤導体を用いたリニア誘導モータ実験機における 制御特性向上の検証
岸本諒太、尾上明歩、西田颯汰(メカトロニクス研究室)
1. 研究背景
近年産業界を中心に振動や騒音の少ないクリーンな搬送 装置として磁気浮上式搬送システムが注目されている。例 えば半導体工場のような高い空気洗浄度が求められる環境 では塵や埃は大敵である。そのため従来の車輪支持式であ ると車輪とレールの摩擦により塵や埃が発生し、品質が低 下するという問題があった。リニアモータを用いた磁気浮 上式搬送装置は駆動対象が浮上しているため、レールとの 接触による塵や埃を抑えることができる。従って、クリー ン性や静粛性が求められる環境で磁気浮上式搬送装置の応 用ができると期待されている。[1]
2. 目的
リニア誘導モータ((Linier Induction Motor : LIM)を用 いた新しい磁気浮上式搬送システムを提案する。提案する 新システムと従来のシステムの比較図を図1に示す。従来 の磁気浮上式搬送システムは推進制御をLIMで行い、浮上 制御を常電導電磁石で行う。しかし、LIMから発生する吸 引力が浮上制御を妨げる問題がある。提案するシステムは LIMの吸引力を浮上力として有効に利用することでこの問 題を解決できる。[2] 提案している磁気浮上式搬送システム は、浮上状態を維持しながら駆動するため、直接浮上力を 測定することは難しい。そこで我々は、1次側と2次側の 間隔を測定し、安定して装置を浮上させることができる浮 上制御システムの確立を目指す。
図1 従来型システムと提案型システムの構成
3. 二周波数重畳電源による制御
提案磁気浮上式搬送システムを実現するために、図2のブ ロック図に示す二周波数重畳電源を用いた制御システムを 提案する。滑りを持つモータ駆動周波数成分𝑓𝑑とモータ速 度に同期した滑りを持たないモータ速度同期周波数成分 𝑓𝑚の二つの周波数成分を重畳することで、推進力と吸引 力を同時に制御することができる。𝑓𝑚は滑り周波数をも たないため、常に𝑓𝑚による推進力𝐹𝑡𝑚は発生しない。よっ て駆動周波数成分𝑓𝑑のみで推進力𝐹𝑡を制御することができ
る。また、fdは吸引力も発生させているが、全体の吸引 力Faの制御まではできない。そこで、もう一方のfmに よって、不足分の吸引力Famを調整することで全体のFa を制御する。
以上のことから、各周波数成分のそれぞれの発生力を独 立して制御することが可能となり、LIM単独で推進力と吸 引力それぞれ同時に制御を行うことが可能となる。[3]
図 2 二周波数重畳電源による制御システムのブロック図
4. LIM実験機の構成
提案システムの実現に向けて、実験により二周波数重畳 電源を用いたLIMの駆動特性を測定する。提案する搬送 装置は鉄道等の長距離かつ長時間を移動する搬送装置を想 定している。従って、実験機では実際の鉄道車両やレール を用いることが最も理想的である。しかし、実験機のコス トや設置する空間に制約があるため、実際の鉄道車両やレ ールを用いることはできない。そこで、実際の鉄道車両や レールに即した直線型の2次導体でなく、円盤型の2次導 体を用いた。
図3 円盤型2次導体を用いたLIM実験機
図3に示すように本実験機は2次側に円盤型導体を使用 し、円盤型導体は磁性導体板と非磁性導体板である鉄とア ルミの複合板を使用している。この実験機は1次側を半固
浮上制御システム(𝑓𝑚)
鉛直方向の 運動モデル
速度
ギャップ 𝐹𝑡𝑑
𝐹 𝑚 𝐹𝑡𝑚
𝐹 𝑑
𝑑
𝑚
𝐹𝑡
𝐹
水平方向の 運動モデル 推進制御システム(𝑓𝑑)
LIMモデル LIM
システム
2021年2月27日
定しているため、駆動時は反作用により2次側の円盤型導 体が軸を中心に回転運動し、1 次側は鉛直方向にのみ可動 する。これにより任意の時間、距離の測定が可能となる。
速度は、二次側円盤導体の軸の下部に取り付けたロータリ エンコーダを使用して測定する。
先行研究では、LEDセンサを1つしか取り付けていな かったため、1次側鉛直方向しか測定することができなか った。また、1点しか測定できていなかったためLIM1次 側の全体が浮上しているのか、傾いて片側のみ浮き上がっ ているのか判断ができなかった。そこで浮上時の1次側の 姿勢に問題があると考えた。そのため本研究では、図4に 示すようにLEDセンサは、1次側本体の下にスペースを 設け、四方に1つずつ配置した。これによりLIM駆動 時、LIM1次側の頂点付近4ヶ所のギャップ測定が可能に なり1次側の姿勢を確認することができる。
図4 LIM 1次側実験機の構造とLEDセンサの配置
5. 速度・浮上同時制御
LIMのギャップの初期値を7mm、指令値を6mmに固 定し速度を0~4m/sまで2m/sずつ変化させ、1次側と2 次側のギャップを測定した。ギャップを測定することで1 次側の姿勢を確認する。図5に速度の測定結果、図6にギ ャップの測定結果、図7にLEDセンサ1~4の測定結果を 示す。
図5 速度測定
図6 ギャップ測定
図7 LEDセンサ1~4のギャップ測定
図6のギャップ実測値は1次側の重心と二次側とのギャ ップである。図6、7より実測値が指令値を追従していな いことから1次側が浮上していないことが分かる。また、
1,2は吸引力が多く発生し、3,4は吸引力が少ないこと がわかる。このことから、1次側の姿勢は水平でないこと がわかる。
6. 結論
従来の実験機ではLEDセンサが1個であり、LIM1次 側の姿勢を検出することができず、1次側と2次側のギャ ップ測定時の正確性に欠けていた。本研究では、LEDセ ンサを1~4個に増やすことで1次側の姿勢を検出するこ とができより正確なギャップ測定が可能になった。
7. 今後の課題
LEDセンサを増やすことで1次側の姿勢を検出すること ができたので、それをもとにして浮上できるようにプログ ラムの変更を行う。
8. 参考文献
[1]S. Nakatani, D. Okamori, T. Morizane and H. Omori,
“Dynamic Characteristics Verification of Linear Induction Motor by Simultaneous Propulsion and Levitation Control”, inProc. EPE’20 ECCE Europe, Sep. 2020.
[2] 電気学会磁気アクチュエータ調査専門委員会委員「リ ニアモータのその応用」オーム社pp.2-3pp.14-27(1991)
2
4 1
3
[2021年2月27日] 発表番号 08
PFCC・VSC 併用型風力発電システムにおける 誘導発電機の DF 化による低風速時発電電力の向上
有吉謙汰 曽和勇飛 (メカトロニクス研究室)
指導教員:森實俊充 1. はじめに
地球環境問題への関心の高まりと、脱原発への 動きを背景に再生可能エネルギーが注目を集めて いる。そこで、再生可能エネルギーの一種である 風力エネルギーを利用した発電システムが、世界 中で積極的に開発が進められている。洋上風力発 電は海上に建てるため、建設コストが高騰する。
そのため、洋上風力発電の普及の妨げになって いる。ヨーロッパ諸国では急速に陸上風力発電の 開発が進んでいるため、風況に恵まれた広い土地 が少なくなり、騒音や景観などの環境問題から、
今後の新たなフロンティアとして洋上風力発電が 注目されている。[1]
2. 研究目的
本 研 究 で は 、PFCC(Power Factor Correction Converter)・VSC(Voltage Source Converter)併用形風 力発電システムにおける誘導発電機を二重給電化 にすることで、低風速での発電電力を向上するこ とを目的とした。
3. 提案する二重給電誘導発電システム
風力発電システムの発電機には、同期発電機と 誘導発電機がよく用いられる。このうち、同期発 電機は風速に関係なく発電でき発電効率が良い が、発電機自体が高価でありシステム全体のコス トが高くなる。一方、誘導発電機は発電機の構造 が簡単なため安価であり、堅牢で周波数は調整が 不要である。
3.1. PFCC・VSC併用型風力発電システム
SCIG(Squirrel Cage Induction Generator)は、誘導 発電機の1種であり、比較的安価で堅牢な発電機 である。SCIGを用いた風力発電システムを図1 に示す。
図1 SCIGを用いた発電システム
SCIGは同期周波数以上でないと発電せず、低速 で発電ができない。そのため、SCIGの励磁にVSC を用いることで、任意の回転数で発電を可能とし 低速でも発電可能にする。ただし、図1からVSC は無効電力と有効電力が流れるためVSCの容量が 増加し、コストが増加する。
そこで、高価なVSCの容量を削減し、コスト を低減するためにVSCとPFCCを並列に接続す る。2つのコンバータを用いたPFCC・VSC併用 型風力発電システムを図2に示す。
図2 SCIGを用いたPFCC・VSC併用型風力発電システム 図2から、無効電力をVSC、有効電力をPFCC に通過させることで、高価なVSCの容量を削減 しコストを低減する。さらに、変形台形波によっ て低容量化する。そのため、同じ電圧でも正弦波 よりトルクが大きくなり、高い発電量を生み出す ことができる。しかし、このシステムでは、VSC と固定子の電圧が等しくしなければならない。こ のことが、電力変換器容量の容量低減を妨げてい る一因となっている。
3.2. PFCC・VSC併用型風力発電システムのDF化 DFIG は巻線形誘導発電機と同じ構造をしいて いる誘導発電機である。そのため、DFIGは固定子 だけでなく、回転子も励磁することが出来る。
DFIGを用いた発電システムを図3に示す。この発 電システムはVSCで回転子を励磁し、PFCCで出 力電力を整流する。PFCCにより力率改善を行うた め、VSCからは無効電力のみが出力される。
図3 DFIGを用いたPFCC・VSC併用型風力発電システム 誘導発電機の等価回路を図4に示す。DFIGの等 価回路から励磁している場所が出力端と異なるた め、低い電圧でも励磁可能である。ゆえに、励磁電 力のみを二次側に供給すればよいため、発電量の3 割程度の容量の電力変換器で励磁できる。[2]
(a)SCIGの場合 (b)DFIGの場合
図4 誘導発電機の等価回路
さらに、DFIGは回転子が励磁される同期周波数 𝑓𝑠は回転子の回転周波数𝑓1と二次側の電源周波数 𝑓2の和となるため式(1)となる。また、𝑓2はすべりs と𝑓𝑠の乗算で表せるため式(2)となる。
𝑓𝑠= 𝑓1+ 𝑓2 (1)
𝑓2= s𝑓𝑠 (2)
加えて、図2と同様にVSCの変調を変形台形 波変調にすることで容量削減と高性能化すること ができる。変形台形波とは台形波と方形波を組み 合わせた波形である。1周期のうち方形波の含ま
[2021年2月27日] れる割合γを変更することで波形が変形すること
で、波形に含まれる基本波と高調波の割合が変わ る。そのうえ、基本波振幅が変わることで正弦波 に比べて大きくなる。
(a)γ=0 (b)γ=0.5 (c)γ=1.0
図5 変形台形波の波形
ゆえに、PFCC・VSC併用型風力発電システムの 発電機をDF化することで励磁電力分だけを VSC に流すため、容量を削減でき、低速領域においても 発電が可能である。
4. 発電電力測定について
低コストな発電システムを実現するため、変形 台形波変調を用いた SCIG と DFIG の発電効率と
VSC1VA 当たりの発電量を測定する。その結果、
DFIGはSCIGよりも VSC容量を削減できるのか の検証を行う。そのため、2つの発電機を用いて直 流機の機械的出力、発電機の出力、VSC容量を測 定する。SCIGとDFIGにおいて𝑓𝑠は同じである。
しかし、𝑓1と回転速度は𝑓2の影響で違いがある。図 6にそれぞれの実験配線図を示す。図6(a)では変換 器それぞれの出力電流と出力電圧、発電量が測定 できる。図 6(b)は図 6(a)と測定箇所はほとんど変 わらない。しかし、PFCCとVSCの接続場所が分 離している。そのため、新たにVSCの電流を測定 する箇所を設けた。PFCCの性能を発揮できる周波 数は40~50Hzである。
(a)SCIGの場合 (b)DFIGの場合
図6 実験配線図 5. 測定条件及び測定方法
発電効率の比較実験の測定条件を表 1、表 2 に 示す。この時、誘導機の回転速度はすべり-6%で駆 動する。また、PFCC の性能を発揮できるように 40Hzと50Hzで制御を行う。
表1 SCIGの測定条件 表2 DFIGの測定条件
𝑓𝑠[Hz] 40 50 𝑓𝑠[Hz] 40 50
𝑓1[Hz] 42.4 53 𝑓1[Hz] 37.6 47
回転数[rpm] 1272 1590 𝑓2[Hz] 2.4 3 回転数[rpm] 1128 1410 6. 発電効率の実験結果
発電効率の測定結果のうち40Hzを図7に50Hz を図8に示す。
図7 励磁周波数40Hzの発電効率の測定結果
図8 励磁周波数50Hzの発電効率の測定結果 測定結果から、γによらずDFIGはSCIGより発 電効率が小さいことが確認できた。図7、図8より DFIGの発電効率の変動は小さい。よって、変形台 形波の影響は小さいと考えられる。
7. VSC1VA当たりの発電量の実験結果
VSC1VAあたりの発電量を測定した。γの値ごと
に測定した VSC1VA 当たりの発電量において、
40Hzを図9に50Hzを図10に示す。
図9 励磁周波数40HzのVSC1VA 当たりの発電電力の測定結果
図10 励磁周波数50HzのVSC1VA 当たりの発電電力の測定結果
測定結果から、γの値を増加することでVSC1VA 当たりの発電量は減少していく。しかし、図9、図 10において、DFIGはSCIGと比較すると、VSC1VA 当たりの発電量は増加したことが確認できる。つ まり、VSC容量を削減し発電量を増加できると考 えられる。
8. まとめ
DFIGのVSC 1VA当たりの発電量はSCIGと比 較すると高いため、VSC1VA当たりの発電量は4 倍の増加が確認できる。したがって、VSC容量を 削減でき25%のコスト低減の見込みがある。
今後の課題は、PFCC・VSC併用形風力発電シス テムにおける誘導発電機を DFIG にすることで、
高速回転時での発電性能の測定が挙げられる。
9. 参考文献
[1]牛山泉「風力発電の歴史」オーム社p111 [2]辻健太郎「巻線形誘導発電機を用いた潮流発電 システムにおける増速比および発電機容量に関す る研究」日本大学大学院(2017)
[3] 大阪工業大学電気電子システム教室「電気電 子システム実験b・c」大阪工業大学(2017)