並列配線システムAmaterousの改良と評価
6
0
0
全文
(2) nd a path to connect the terminal and both edges of the partition where the terminal resides, in order to prevent, the problem of redundantly long paths. As a result of the experiment, sucessfully reduced wiring length by 5 to 16 %, and proved the e ectiveness of the algorithm.. 1.. .. はじめに. , VLSI. (PCB). ,. 近年 やプ リント基板 の高集積化 大 規模化にともない 回路設計を支援する ツール の処理時間も著しく増加する傾向にある そこで処理 ツールを並列化する研究が 時間の短縮のために 多く行われている 我々の研究対象である配線処理では 並列化の有効 な手法として大域・詳細の 段階配線が知られている この方法では各ネットの経路探索が ネットの配線領 域を大まかに見積もる「大域配線」と その領域内で実 際のグリッド 単位の探索を行う「詳細配線」の 段階 で処理されるため 並列性を高めることが可能である このような 段階配線では 大域配線で詳細経路を 常に仮想的に扱いながら経路の見積もりを立てており 実際の詳細経路との誤差を少なくするために 詳細配 線での実際の配線状況を大域配線にフィード バックし 大域経路の見積もり誤差を常に小さくしておく必要が. ,. .. CAD. ,. 2. 2. ,. CAD .. .. , ,. 2. ,. ,. y 豊橋技術科学大学. . ,. ある しかしこのフィード バックを頻繁に行うと配列 処理が逐次化され 頻度を小さくすると配線品質が悪 化するという問題点がある そこで我々はこのフィードバックを除去するために 大域配線以前にあらかじめ仮想的な経路を配線するこ とにより配線経路を把握し 大域/詳細配線を独立し 1) て行う新たな並列配線システム の開発 を行っている これまでの研究の結果 は 従来の並列配線システムに比べて高速であり かつ配 線困難な問題に対する耐性が高いことが明らかになっ には配線長が大きいとい ている しかし う問題があり その主な原因として仮想的経路と端子 の接続アルゴリズムの不備が挙げられている そこで 本論文ではこの問題を解決する新たな端子接続アルゴ リズムを提案する. ,. .. ,. ,. , Amaterous , Amaterous ,. .. .. ,. , Amaterous. .. .. ,. 2.. 並列配線システム Amaterous. Amaterous ,. ,. の配線処理は 「配線空間のそれぞれの 単位領域に 同時に存在できる全ての経路をあらかじ め仮想的に把握しておき 大域配線ではその仮想的な. Toyohashi University of Technology. 1 −55−. ,.
(3) マスタ. マスタ. マスタ. スレーブ. スレーブ. スレーブ. スレーブ. スレーブ. スレーブ. 準備処理. 大域配線. 図1. 今回の 探索順番 前回の 移動方向. 2. 詳細配線. 1. 並列処理の流れ. 図3. Y方向レイヤ. X方向レイヤ. 3. 「右手法」による探索. (c). (a) パーティション. 図2. スライス. 配線空間の分割. 経路を消費していく事で経路を決定する」というモデ ルに基づいている 全ての仮想経路をあらかじめ求め ておき 管理することで 大域配線の時点で経路の配 線性が完全に把握できることになる これによって詳 細配線から独立した大域配線の一括処理が可能になる において大域配線はこの仮想経路の中か ら適切なものを選択する処理であり 詳細配線はそれ らの冗長性を除去する変形処理である は 一つのマスタプ ロセスと複数のス レーブプロセスが存在するマスタ―スレーブ型の構成 を持ち マスタからスレーブに指示を送ることにより 各スレーブが並列に配線処理を行っていく 準備処理 と詳細配線では各スレーブが分割された配線領域の 担当部分の処理を独立に行い 領域間の情報交換のた めスレーブ間通信を各々一度だけ行う 大域配線では ネットの並列性を利用して、各スレーブが異なるネッ トの配線処理を独立に行い マスタはネット間の整合 性チェックを行う 図 2.1 配線空間の分割 の配線空間は グリッド からなる矩形面 を多層にしたものであり 各層をレ イヤと呼ぶ 各レ イヤはパーティションと呼ぶ矩形に分割され 各々が 大域配線の探索単位である 大域配線での配線方向は レイヤごとに または 方向に制約されており この方向に沿ってパーティショ ンを連結したものをスライスと呼ぶ またスライスは 準備処理と詳細配線の処理単位でもある レイヤ間の 移動は 隣接するレ イヤのみを接続するビアによって 行う 2.2 Amaterous の配線方式 2.2.1 準 備 処 理 準備処理では 大域配線で経路を探索するための情 報を集め またその配線性を保証するための処理を行. .. ,. ,. .. Amaterous. ,. Amaterous ,. .. .. ,. .. ,. Amaterous. ,. ,. ,. ,. ,. .. ,. ( 1).. .. ,. ,. ,. . ,. x. .. .. .. y. ,. (b). (d) 図4. c-path 探索の停止条件. .. ,. う 処理はスライス単位で独立に行う為 ほぼ完全な並 列処理が可能である 準備処理では まずスライスに (以 下 )と呼ぶ仮想的な経路を配線する の配線は 迷路探索法の一つである「右手法」 図 を用いて行う 「右手法」による経路は冗長なた め実際の配線経路としては採用できないが 常にパー ティションの配線本数を最大化する経路をとるため 大域配線での選択経路の候補数が最大化される の停止条件として スライスの右端に達した 図 一度通過したパーティションの境界に達した 図. c-path c-path ( 3). .. ,. ,. Capacity path .. .. ,. .. ,. c-path , ( 1) ( 4(a)) ( 2) ( 4(b)) ( 3) スライスの上端に達した (図 4(c)) があげられ、2 または 3 の場合には, 最後に通過した パーティションの境界以後の軌跡は削除する. この結 果, 図 4(d) のように配線される. 続いて各端子を図 5のように c-path に接続する. そ の際、各々の端子について, 端子が接続するパーティ ションに隣接するパーティションを貫通する c-path を 選択して接続する. したがって端子から隣接するパー ティションへの接続が保証され, 大域配線では隣接パー ティションを経路の始点/終点とみなすことができる. 2.2.2 大 域 配 線 大域配線では各ネットの経路を 端子間のマンハッ タン距離の短い順に パーティションを単位とするコス ト最小探索により求める ここで経路のコストはパー ティションごとのコストの総和であり 各パーティショ 本 ンのコストは配線容量 すなわち使用可能な. 2 −56−. ,. ,. .. ,. ,. c-path.
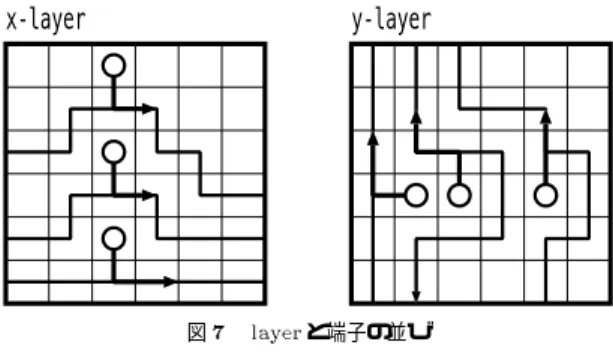
(4) x-layer. y-layer. 図7 図5. layer と端子の並び. , 50%, ,. 切なパーティション選択による損失は 各端子につい て望ましくない方向に行く可能性が またその場 合の損失が パーティションと考えると 平均して 端子あたりパーティション幅程度であると見積もるこ とができ と他の配線システムとの配線長 の差のほとんどがこの問題に起因することが明らかに なっている. 端子の接続. 2. 1. , Amaterous .. 3.. 図6. 冗長な経路. .. ,. ,. 数に反比例する すなわち 経路長を短くすることと 他のネットの配線を妨げないことの双方に配慮した経 路が求められる また 経路を構成するパーティション列の各々につ いて 列中の全パーティションを通過する が存 在することを必要条件とし そのような 群を経 路に占有的に割り当てる したがって 各経路が固有 の 群を持つこと すなわち必ず配線可能である ことが保証される 2.2.3 詳 細 配 線 準備処理で配線された は 各パーティション の配線容量を最大化している半面 それぞれの経路は 迂回が多く 実際の配線回路としては冗長である そこ で詳細配線では パーティション列を通過するという 性質を保ちつつ 経路の短縮 直線化を行う また それに続いてレイヤ間配線のためのビア位置 を定めるために経路の交差点を求め ビアとパーティ ション端の間の不要経路を削除して配線処理を完了 する 2.3 冗長な配線経路 節で述べたように 準備処理での端子と の接続処理では 端子から隣接パーティションへの経 路が確保される その際 左右あるいは上下のどちら に隣接するパーティションが選択されるかは 端子と の接続容易性のみにより定まる したがって 図 に示すように 接続すべき端子対か ら互いに遠ざかる方向のパーティションが選択され 配線経路が冗長になる可能性がある 実際 この不適. ,. .. ,. c-path. .. ,. ,. .. ,. ,. ,. c-path c-path. c-path , ,. , ,. .. ,. .. ,. .. 2.2.1. c-path. , .. , 6. ,. c-path. ,. ,. .. ,. .. ,. ,. 新しい端子接続アルゴリズム. 2.3. 本論文で提案するアルゴリズムは 節で述べた問 題を以下のように解決する 端子を通りパーティションの両端に達するパス を引く このようなパスが得られた端子につい ては 大域配線の始点を端子が存在するパーティ 節で述べた損失は ションとすることができ 生じない のようなパスが配線不可能 あるいは他の端子 に関する接続処理の妨げになる場合 従来と同様 に一方の隣接パーティションを通過する に接続する 端子接続と平行して 配線を行い パー ティションを通過する が十分確保でき るようにする 準備処理を つのターンに分け ターン目で パスと接続できなかった端子はレイヤを移動し て ターン目で再び接続を試みる 3.1 端子のレイヤ割当て 実際の回路では 端子が直線上に並んでいる事が多 い このような場合 端子の並びと垂直方向のレイヤに 接続パスを配線すると領域の使用効率が高くなる 図. .. ( 1). ,. .. ,2.3. .. ( 2) 1.. ,. .. ( 3) ( 4). 2. ,. c-path. c-path c-path. .. ,. ,1. ,2. .. ,. .. ,. (. 7).. ,. x. そこで本アルゴリズムでは 端子を 方向に並んで いるもの 同じ 座標を持つ物) 方向に並んでい るもの(同じ 座標を持つもの)の 種類に分け 前 者の接続パス配線を 方向レイヤで、後者を 方向レ イヤでそれぞれ行う 例として図 の のようなパーティションがあっ た場合 端子 では同じ 座標を持つ端子が つ 同 じ 座標を持つ端子が つなので 方向レイヤに割. 3 −57−. (. y. ,. x. y. y . 8 (a). 1. x. ,y 2. ,x. x. ,. 2 ,.
(5) x-layer. y-layer. r. β α. (b) 図8. ,. 端子の接続レイヤ決定. .. 3. .. ,. .. y. 8 -(b) . ,1 ,2. x. 0,. x , ,x. ,x. ,x ,y. 3, y. 5. .. ,x 8-(c). ,x. ,y. y. ,. ,. ,. .. .. ,. c-path. c-path. ,. c-path. .. 1. . c-path. c-path. ,. ( 2). ,2. ,. 1. ( 1). x ,. x. .. .. (d). .. ,1. ,x. 9.(a) ,. . ,. c-path. .. ,. (e). 図9. ,y. 2. ,y. c-path ,. (c). (c). り当てる 端子
(6) では同じ 座標を持つ端子が 同 じ 座標を持つ端子が つなので 方向レイヤに割 り当てる 端子 のように 方向 方向ともに同じ数 の端子が存在する場合には より端子が密集している ほうが配線しにくいため 方向 方向それぞれの端 子列に関して もっとも遠い つの端子間の距離を比 べ 小さい方の端子列と垂直なレイヤに端子を割り当 てる 端子 の場合 方向が 方向が なので の 端子列と垂直な 方向レイヤに割り当てる 以下 他 の端子に関しても同様に処理を行うと 方向レイヤ のように 方向レ イヤは図 のよう は図 になる なお ターン目においてパスと接続できなかった 端子は ターン目において 方向レイヤのものは 方向レイヤ 方向レイヤのものは 方向レイヤにそ れぞれ移動してパスと接続する 3.2 端子の接続 本節の冒頭でも述べたように 端子を通りパーティ ションの両端に達するパスが望ましいパスである 一 方 は端子を障害物とみなして配線されている ので このような接続パスとして用いるには必ずしも 適切ではない そこで本アルゴリズムでは 、端子接続 を行うパーティションについては 一旦全ての を削除し 接続パス配線を行う ただし接続パス配線と 並行してパーティションを通過する 配線を行 が減少する可能 うので 従来の方法に比べて 性はごく小さく 逆に後述のように従来の方法よりも 増加することも期待できる 3.2.1 1 ターン目の処理 ターン目にてパスに接続できなかった端子は ターン目にてパスと接続できれば良いので 隣接パー ティションのパスの状況を ターン目では無視し、処 理の高速化と領域の有効活用をはかっている 以下 方向レイヤのパーティションを例に ターン目のア ルゴリズムの詳細を示す スライス単位で を引いた後(図 ) 接続端子の存在するパーティション内の全ての を削除する 先にスライス単位で を引くことにより 端子接続に用いないパーティ ションにおいて 複数のパーティションにまた がった長いパスを得ることができる 端子とパーティションの両側に接続するために. y. (b). (a). (a). 新しい端子の接続方式( 1 ターン目 ). .. まず端子とパーティションの右端を接続する パーティションの右側から端子へのパスを 下 から順に左手法で求める(図 端子と接 続せずにパーティション左端にパスが達した場 合には 端子左側に仮想的な壁を作り端子を貫 通するパスを引き直す また パスと接続でき た端子をキューに積む パーティション右端の全ての格子点に関して探 索が終了後 キューから端子を取りだし 順番 に端子からパーティション左端へのパスを引く 図 図 の段階では 端子とパーティション の両端は接続されているが が 本もな いなど 配線領域を有効に活用しているとは言 えない そこで 領域を有効活用するために の配線をおこないつつ 端子接続パスを上 方へ移動させる パーティションの右側の上か ら順番に今度は右手法でパスを配線する パス がパーティションの左側に達した場合はそれを として保存し 途中で端子 あるいは端 子に接続されたパスにぶつかった場合には 端 子につながれたパスを一度削除し 端子を貫通 するパスを引き直す 図 を右端の全ての格子点に対して繰り返す こ の結果 端子と両端を接続するパスと パーティ ションを通過する が得られる 図 なお ターン目では隣接パーティションにパ スがあることを保証していないため、パーティ ション両端に接続できない端子が発生した場合 には再配線フラグを立て ターン目にて配線し なおす 図 の例では 上記のアルゴリズムによって全ての 端子が両端に接続でき かつ 本の が得られ る 図 従来の方法では端子接続の後で残存す る は 本であるので 消費の削減とい う副次効果も得られている. ,. 9-(b)).. ,. . .. ( 3). ,. ,. ( 9-(c)). ( 4) ( 9-(c)) path. , .. ,. ( 5) 4. ,c-. ,. .. .. ,. ,. ( 9-(d).. ,. c-path. ,1. 9. ,c-path 1. ,. c-path. 4 −58−. ,. .. ( 9-(e)). c-path 1. ,. ,. . , ( 9-(e)).. ,2. ,. ,. 2. .. c-path. , c-path.
(7) ,. .. 手法で求め 接続できた端子をキューに積む 右 側のマークを全て使用しても接続できない端子 が存在する場合には 左側のマークより右手法 で接続を行うが例では省略する マークと端子 を接続することにより 隣接パーティションに パーティション分のパスを占有することがで き 大域配線の端点に設定することが可能とな る 全ての端子の片側接続が終わった後 キュー から端子を取りだし 順番にパーティション左 端 左側のマークに接続した端子は右端 への パスを配線する 図 パーティション端 に接続できないパスは削除し 次の端子の処理 に移る 全ての端子について の処理が終了したら パー ティション右端の一番上の格子点より右手法に の配線を行う 途中でパーティショ よって ンの片側にしか接続できていない端子 パスと 衝突した場合はその端子からのパスを一度削除 し 右端の3マークのうち最も上のものからパス また パーティション を引き直す 図 の両端に接続されている端子 パスと衝突した 場合にはそのパスを削除し端子を貫通するパス を右手法で引き直す 図 この時 片側 接続の端子とは異なり パーティションを貫通 するパスが引けることが保証されているので パーティション端の格子点にマークがついてい る必要はない これらのパスの移動を行うこと により 後の 配線を妨げず 配線容量を 増加させることができる の処理を右端の格子点全てに対し行う 図 図 において斜線の端子がパーティ ションの右端にしか接続されていないが 3マー クによって隣接するパーティションに貫通する パスが存在することが保証されているため 大 域配線における端点は設定することができる. ,. (b) y-layer. (a). *. **. (d) x-layer. (f). ( 4). * * * *. **. 図 10. *. 2. 1. ,1. .. ,2. ,. ,. , c-path. ,y. ( 1). ( 2). .. 10-(c). ( 10-(b)),. 2. .. 1. 1. ,. . y. , ,y. ( 3) 2. ,. ( 10-(e) ).. ,. (x. x ( 10-(d)).. c-path. ,. ,. .. .. ( 10-(f)).. . c-path. ( 5) 4 (h)). 10-(h). ,. , ,. ,. ,. ,. .. ( 10,. ,. ,. .. ,. 3. ,. ,2. .. 10-(a). 10-(c). 1. .. ,. .. ). ( 10-(g)). ,. 2. ,. ( 10-(e)).. ,. 新しい端子の接続方式( 2 ターン目 ). ターン目の処理 ターン目の処理が全てのパーティションにおいて 終了したとき つでも両端接続できない端子があれ ばその端子を対となるレイヤに移動し ターン目を実 ターン目で処理するのは両端接続 行する ただし できなかった端子の移動元と移動先のパーティション のみで その他のパーティションに関しては ターン 目の結果をそのまま使用する 移動元のパーティショ ンに関しては 移動する端子のパスを削除するだけで なく 再び処理することにより 移動する端子のパス に妨害され配線できなかった が配線可能とな り 配線容量を向上させることができる 以下 方向レイヤのパーティションを例に ター ン目のアルゴリズムの詳細を示す 図 のようなパーティションにおいて レ イヤ割り当てを行い 図 ターン を実 行すると図 のような状態になる 図 において つの斜線の端子はパーティ ションの片側しか接続されていない ターン では隣接パーティションにパスがあることを保 証していないため このような端子は大域配線 の端点としてのパーティションを設定すること ができない そこで 対となるレイヤ 方向の レイヤでは 方向 方向のレイヤでは 方向 のレイヤ)に端子を移動する 図 ターン目ではパーティションの片側にしか接 続できない端子も考慮しなければならない そ こで パーティションの境界において 隣接パー ティションを貫通する との交点にマー クする 図 の3 その後 パーティション の一番下のマークから順番に端子へのパスを左 3.2.2. ,. ,. c-path. (h). (g). , .. (. *. (e). * * ** **. *. * * * *. * * ** **. * *. * *. 1. (C). .. ,. 4.. 評. .. 価. 前説のアルゴリズムの有効性の評価を行 うために. Pentium II(450MHz),16 台の PC クラスタにおいて MCM ベンチマーク を用いて実験を行った. 2). 4.1 配線性能と実行時間 はじめに 端子のパーティション両端への接続成功 率を調べてみたところ表 のようになった この結果 より大部分の端子がパーティション両端への接続に成 功しており 後の大域配線において冗長な経路の選択 の回避が期待できる 次に本論文で提案する端子接続アルゴリズムを使用 した場合と 旧来の との配線長の比較を 行うために 配線長とビア数の比較を行ったところ表 のようになった なお「逐次」は 台の にて実. ,. 1. ,. 2. 5 −59−. , ,. .. .. Amaterous. .. 1. PC.
(8) 表1. 端子のパーティション両端接続成功数 両端接続成功端子数 ベンチマーク 全端子数 1 ターン目 2 ターン目 MCC1-75. 2043. 2043. 2043. MCC2-75. 14659. 14638. 14659. MCC2-45. 14659. 14648. 14654. 表2. 並列効果. 16. Amaterous MCC2-45. MCC ベンチマークの配線結果. 2. 配線長 ( 103 ). ビア数. 時間 (秒). 旧 (逐次) 新 (逐次). 477. 4990. 12.61. 436. 4321. 12.15. 旧 (16 並列) 新 (16 並列). 500. 4824. 2.41. 手法 MCC 1-75. 466. 4211. 2.59. 旧 (逐次) 新 (逐次). 7232. 39141. 459.99. 6221. 31970. 506.69. 旧 (16 並列) 新 (16 並列). 7439. 40089. 61.65. 6211. 32606. 75.36. 旧 (逐次) 新 (逐次). 10105. 31688. 638.61. 9515. 27515. 796.18. 旧 (16 並列) 新 (16 並列). 10385. 33482. 52.19. 9840. 28753. 97.31. MCC 2-75. MCC 2-45. 4. 4. 図 11. MCC1-75. 3600. 16.76. 17.64. MCC2-75. 38400. 23.64. 24.25. MCC2-45. 57600. 27.62. 27.99. 16. 2. ,. ,. .. , 3. 1. .. ,. ,. ,. .. .. .. ,. ,. c-path. ,. 1( 11. , ),2,4,8,16 .. .. 16. ま. と. .. め. , Amaterous .. ,. ホスト数. , .. ,. 5.. PC. 16. 4.7 8.2. 行を行い 「 並列」は プロセッサの クラスタ にて並列に実行を行ったものである 表 の結果を見ると全てのベンチマークにおいて 配線長 ビア数ともに旧来の手法にくらべて減少して おり 今回提案した端子接続アルゴリズムの有効性を 確認できた これは新手法によって旧来の手法にみら れた冗長な配線経路の選択を防ぐことができたのに加 え 表 のように パーティションあたりの配線容量が 増加しているためだと思われる この配線容量の増加 は端子の密集しているパーティションに顕著に現れて おり 旧来の手法では通過できなかったパーティショ ンが通過できるようになり より配線長の減少に貢献 したのではないかと思われる 一方 処理時間に関しては全てのベンチマークにお いて増加してしまっている この原因としては準備処 理における端子のレイヤ割り当てや 端子と の 接続処理の複雑化が考えられる また配線容量の増加 によって 大域配線における経路の探索時間も増加し てしまっているため 探索空間を制限するなどの処理 を加えることによって処理の高速化が期待できる 4.2 台 数 効 果 今回提案したアルゴリズムと旧来の手法における並 列効率を比較するために 各ベンチマークについて 、 ホスト数を 逐次 台と変化させた時の速度 台で 向上率を図 に示す 今回提案した手法では. .. 8. ホスト数増加による並列効果. ∼ 倍の台数効果を得ることができたが 旧来の 手法に比べ並列効果が低下してしまっている この主 な原因は大域配線にかかる処理時間が旧来の手法にく らべ大きいことがあげられ 大域配線を高速化するこ とによって改善されるものと思われる. 表 3 1 パーティションあたりの平均配線容量 ベンチマーク 全 part 数 旧手法 新手法. , 16. Amaterous2 MCC2-45 Amaterous MCC2-75 Amaterous2 MCC2-75 Amaterous MCC1-75 Amaterous2 MCC1-75. 8. 本論文では 大域/詳細配線を独立して行う並列配 線システム における 端子接続方式の改 良を提案した 従来のアルゴリズムでは 端子を隣接パーティショ ンを通過する と接続していたため 平均して 端子辺りパーティション幅程度の配線長増加が生じて いた 今回提案したアルゴリズムでは 端子とパーティショ ンの両端を接続するパスを求めることができるため このような問題が生じない 旧来の手法と提案した手法を比較したところ ∼ の配線長の減少に成功し 当初の目標である端子 辺りパーティションの幅程度の配線長の増加を防ぎ さらにそれ以上の配線長の減少に成功した また ホスト並列における配線にて ∼ 倍の並列効果 を得ることができた 今後は実行時間の高速化 配線長のさらなる減少を 行っていく予定である. c-path. ,. ,. ,. .. ,. ,. .. 16%. 4.7 8.2. .. .. 1). ,5. ,. , 16. .. ,. 参 考 文 献. . Amaterous: . , Vol. 42, No. 4, pp.732-744, April 2001. 2) Collaborative Benchmarking Laboratory, Dept. of Computer Science, North Carolina State Univ. 1995.. 6 −60−. 田中孝太郎,大野和彦,中島浩 経 路選択法による高性能並列ルータ 情報処理学会 論文誌. PDWorkshop'93. Benchmark. Set.. http://www.cbl.ncsu.edu/CBL Docs/ pdw93.html.
(9)
図

関連したドキュメント
実際, クラス C の多様体については, ここでは 詳細には述べないが, 代数 reduction をはじめ類似のいくつかの方法を 組み合わせてその構造を組織的に研究することができる
ESET PROTECT から iOS 端末にポリシーを配布しても Safari の Cookie の設定 を正しく変更できない現象について. 本製品で iOS
<警告> •
と言っても、事例ごとに意味がかなり異なるのは、子どもの性格が異なることと同じである。その
項目 浮間 赤羽⻄ 赤羽東 王子⻄ 王子東 滝野川⻄ 滝野川東 指標②ー2 同じ 同じ 同じ 同じ 同じ 同じ 減少. ランク 点数 浮間 赤羽⻄
東京スカイツリーも五重塔と同じように制震システムとして「心柱制震」が 採用された。 「心柱」 は内部に二つの避難階段をもつ直径 8m の円筒状で,
「養子縁組の実践:子どもの権利と福祉を向上させるために」という
原子炉水位変化について,原子炉圧力容器内挙動をより精緻に評価可能な SAFER コ ードと比較を行った。CCFL
